

Compare Sensor Integration: Mobile Manipulation vs Fixed Systems
APR 24, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Sensor Integration Evolution in Robotic Systems
The evolution of sensor integration in robotic systems has undergone a remarkable transformation over the past four decades, fundamentally reshaping how robots perceive and interact with their environments. This technological journey began in the 1980s with rudimentary proximity sensors and basic vision systems, primarily deployed in fixed industrial applications where environmental conditions were highly controlled and predictable.
During the early developmental phase, sensor integration was characterized by simple, single-modality approaches. Industrial robots relied heavily on contact sensors, limit switches, and basic optical encoders to perform repetitive tasks with minimal environmental awareness. The integration architecture was predominantly centralized, with sensors directly connected to main control units through hardwired connections, limiting flexibility and scalability.
The 1990s marked a significant transition period with the introduction of multi-sensor fusion concepts. Vision systems became more sophisticated, incorporating CCD cameras and early image processing algorithms. Force and torque sensors emerged as critical components for assembly operations, enabling robots to perform more delicate manipulation tasks. However, these advancements remained largely confined to fixed systems due to computational limitations and power constraints.
The advent of mobile robotics in the 2000s catalyzed a paradigm shift in sensor integration strategies. Mobile platforms demanded fundamentally different approaches compared to their fixed counterparts, necessitating real-time environmental mapping, obstacle detection, and dynamic path planning capabilities. LIDAR technology became increasingly prevalent, while inertial measurement units and GPS systems enabled autonomous navigation in unstructured environments.
Contemporary sensor integration has evolved into highly sophisticated, distributed architectures capable of processing multiple data streams simultaneously. Modern systems incorporate advanced technologies including stereo vision, RGB-D cameras, ultrasonic arrays, and tactile sensing networks. The integration of artificial intelligence and machine learning algorithms has enabled predictive sensor fusion, where systems can anticipate environmental changes and adapt their sensing strategies accordingly.
The current landscape demonstrates a clear bifurcation between mobile manipulation and fixed system approaches. Fixed systems continue to leverage high-precision, specialized sensors optimized for specific manufacturing processes, while mobile platforms prioritize versatility, power efficiency, and real-time processing capabilities. This evolutionary trajectory reflects the increasing complexity of robotic applications and the growing demand for adaptive, intelligent sensing solutions across diverse operational environments.
During the early developmental phase, sensor integration was characterized by simple, single-modality approaches. Industrial robots relied heavily on contact sensors, limit switches, and basic optical encoders to perform repetitive tasks with minimal environmental awareness. The integration architecture was predominantly centralized, with sensors directly connected to main control units through hardwired connections, limiting flexibility and scalability.
The 1990s marked a significant transition period with the introduction of multi-sensor fusion concepts. Vision systems became more sophisticated, incorporating CCD cameras and early image processing algorithms. Force and torque sensors emerged as critical components for assembly operations, enabling robots to perform more delicate manipulation tasks. However, these advancements remained largely confined to fixed systems due to computational limitations and power constraints.
The advent of mobile robotics in the 2000s catalyzed a paradigm shift in sensor integration strategies. Mobile platforms demanded fundamentally different approaches compared to their fixed counterparts, necessitating real-time environmental mapping, obstacle detection, and dynamic path planning capabilities. LIDAR technology became increasingly prevalent, while inertial measurement units and GPS systems enabled autonomous navigation in unstructured environments.
Contemporary sensor integration has evolved into highly sophisticated, distributed architectures capable of processing multiple data streams simultaneously. Modern systems incorporate advanced technologies including stereo vision, RGB-D cameras, ultrasonic arrays, and tactile sensing networks. The integration of artificial intelligence and machine learning algorithms has enabled predictive sensor fusion, where systems can anticipate environmental changes and adapt their sensing strategies accordingly.
The current landscape demonstrates a clear bifurcation between mobile manipulation and fixed system approaches. Fixed systems continue to leverage high-precision, specialized sensors optimized for specific manufacturing processes, while mobile platforms prioritize versatility, power efficiency, and real-time processing capabilities. This evolutionary trajectory reflects the increasing complexity of robotic applications and the growing demand for adaptive, intelligent sensing solutions across diverse operational environments.
Market Demand for Mobile vs Fixed Robotic Solutions
The global robotics market is experiencing unprecedented growth driven by increasing labor costs, demand for precision manufacturing, and the need for operational efficiency across industries. Manufacturing sectors, particularly automotive, electronics, and consumer goods, represent the largest demand drivers for both mobile and fixed robotic solutions, with each system type addressing distinct operational requirements.
Fixed robotic systems continue to dominate traditional manufacturing applications where high precision, repeatability, and speed are paramount. Industries such as automotive assembly, semiconductor fabrication, and heavy machinery production rely heavily on fixed installations due to their superior accuracy and cycle time performance. The established infrastructure in these sectors creates substantial ongoing demand for fixed system upgrades and replacements.
Mobile manipulation systems are capturing rapidly expanding market segments, particularly in logistics, warehousing, and flexible manufacturing environments. E-commerce growth has accelerated demand for autonomous mobile robots capable of goods-to-person picking, inventory management, and order fulfillment. The flexibility advantage of mobile systems becomes critical in facilities requiring frequent reconfiguration or multi-product manufacturing lines.
Healthcare and service sectors represent emerging high-growth markets favoring mobile solutions. Hospital logistics, elderly care assistance, and facility maintenance applications require the adaptability that mobile manipulation provides. These sectors prioritize versatility over the extreme precision that fixed systems offer, creating distinct market segments with different performance requirements.
Small and medium enterprises increasingly favor mobile robotic solutions due to lower infrastructure requirements and reduced implementation costs. Unlike fixed systems requiring dedicated workspace modifications, mobile robots can integrate into existing facilities with minimal structural changes, reducing total cost of ownership and implementation barriers.
Geographic market dynamics reveal regional preferences influenced by labor costs, manufacturing focus, and technological adoption rates. Developed markets with high labor costs show strong demand for both system types, while emerging markets initially favor mobile solutions due to infrastructure flexibility and lower capital requirements for deployment.
Fixed robotic systems continue to dominate traditional manufacturing applications where high precision, repeatability, and speed are paramount. Industries such as automotive assembly, semiconductor fabrication, and heavy machinery production rely heavily on fixed installations due to their superior accuracy and cycle time performance. The established infrastructure in these sectors creates substantial ongoing demand for fixed system upgrades and replacements.
Mobile manipulation systems are capturing rapidly expanding market segments, particularly in logistics, warehousing, and flexible manufacturing environments. E-commerce growth has accelerated demand for autonomous mobile robots capable of goods-to-person picking, inventory management, and order fulfillment. The flexibility advantage of mobile systems becomes critical in facilities requiring frequent reconfiguration or multi-product manufacturing lines.
Healthcare and service sectors represent emerging high-growth markets favoring mobile solutions. Hospital logistics, elderly care assistance, and facility maintenance applications require the adaptability that mobile manipulation provides. These sectors prioritize versatility over the extreme precision that fixed systems offer, creating distinct market segments with different performance requirements.
Small and medium enterprises increasingly favor mobile robotic solutions due to lower infrastructure requirements and reduced implementation costs. Unlike fixed systems requiring dedicated workspace modifications, mobile robots can integrate into existing facilities with minimal structural changes, reducing total cost of ownership and implementation barriers.
Geographic market dynamics reveal regional preferences influenced by labor costs, manufacturing focus, and technological adoption rates. Developed markets with high labor costs show strong demand for both system types, while emerging markets initially favor mobile solutions due to infrastructure flexibility and lower capital requirements for deployment.
Current Sensor Integration Challenges and Constraints
Sensor integration in robotic systems faces distinct challenges depending on whether the platform is mobile or fixed, with each configuration presenting unique constraints that significantly impact system performance and reliability. The fundamental difference lies in the operational environment stability, where fixed systems benefit from controlled conditions while mobile platforms must contend with dynamic, unpredictable surroundings.
Power management represents one of the most critical constraints for mobile manipulation systems. Battery-powered platforms must balance sensor density and computational requirements against operational duration, forcing engineers to make difficult trade-offs between sensing capability and mission endurance. Fixed systems, conversely, can accommodate power-intensive sensor arrays and processing units without these limitations, enabling more comprehensive environmental perception.
Computational resource allocation presents another significant challenge, particularly for mobile platforms where weight and space constraints limit onboard processing capabilities. Real-time sensor fusion algorithms must operate within strict computational budgets, often requiring edge computing solutions or cloud connectivity that introduces latency concerns. Fixed systems can leverage more powerful computing infrastructure, enabling sophisticated multi-sensor integration and advanced processing algorithms.
Environmental robustness requirements differ substantially between the two configurations. Mobile manipulation systems must withstand vibrations, temperature variations, dust, and physical impacts while maintaining sensor calibration accuracy. This necessitates ruggedized sensor housings and frequent recalibration procedures. Fixed systems, operating in controlled environments, face fewer environmental stressors but may require different protection strategies for long-term stability.
Communication bandwidth limitations pose unique challenges for mobile platforms, where wireless data transmission capabilities may be constrained by range, interference, or network availability. Sensor data prioritization and compression become critical considerations. Fixed systems typically benefit from reliable, high-bandwidth wired connections that support comprehensive sensor data streaming and remote monitoring capabilities.
Calibration and maintenance accessibility represents a persistent constraint across both configurations. Mobile systems require field-serviceable sensor modules and automated calibration routines, while fixed systems can implement more complex calibration procedures but may face accessibility challenges in industrial environments. The integration of self-diagnostic capabilities becomes essential for both platforms to ensure continued operational reliability and performance optimization.
Power management represents one of the most critical constraints for mobile manipulation systems. Battery-powered platforms must balance sensor density and computational requirements against operational duration, forcing engineers to make difficult trade-offs between sensing capability and mission endurance. Fixed systems, conversely, can accommodate power-intensive sensor arrays and processing units without these limitations, enabling more comprehensive environmental perception.
Computational resource allocation presents another significant challenge, particularly for mobile platforms where weight and space constraints limit onboard processing capabilities. Real-time sensor fusion algorithms must operate within strict computational budgets, often requiring edge computing solutions or cloud connectivity that introduces latency concerns. Fixed systems can leverage more powerful computing infrastructure, enabling sophisticated multi-sensor integration and advanced processing algorithms.
Environmental robustness requirements differ substantially between the two configurations. Mobile manipulation systems must withstand vibrations, temperature variations, dust, and physical impacts while maintaining sensor calibration accuracy. This necessitates ruggedized sensor housings and frequent recalibration procedures. Fixed systems, operating in controlled environments, face fewer environmental stressors but may require different protection strategies for long-term stability.
Communication bandwidth limitations pose unique challenges for mobile platforms, where wireless data transmission capabilities may be constrained by range, interference, or network availability. Sensor data prioritization and compression become critical considerations. Fixed systems typically benefit from reliable, high-bandwidth wired connections that support comprehensive sensor data streaming and remote monitoring capabilities.
Calibration and maintenance accessibility represents a persistent constraint across both configurations. Mobile systems require field-serviceable sensor modules and automated calibration routines, while fixed systems can implement more complex calibration procedures but may face accessibility challenges in industrial environments. The integration of self-diagnostic capabilities becomes essential for both platforms to ensure continued operational reliability and performance optimization.
Existing Sensor Fusion Approaches and Architectures
01 Multi-sensor fusion and data integration systems
Integration of multiple sensors involves combining data from various sensor types to create a comprehensive sensing system. This approach enables enhanced data accuracy, redundancy, and reliability through fusion algorithms that process inputs from different sensor modalities. The integration architecture typically includes data preprocessing, synchronization, and fusion layers that merge information from disparate sources into unified outputs for improved decision-making and system performance.- Multi-sensor fusion and data integration systems: Integration of multiple sensors involves combining data from various sensor types to create a comprehensive sensing system. This approach enables enhanced data accuracy and reliability through fusion algorithms that process inputs from different sensor modalities. The integration architecture typically includes data preprocessing, synchronization, and fusion layers that merge information from disparate sources into unified outputs for improved decision-making and system performance.
- Sensor interface and communication protocols: Effective sensor integration requires standardized communication interfaces and protocols to enable seamless data exchange between sensors and processing units. This includes implementation of various communication standards, signal conditioning circuits, and interface modules that facilitate connectivity. The integration framework addresses compatibility issues, data formatting, and transmission protocols to ensure reliable sensor-to-system communication across different hardware platforms.
- Embedded sensor integration in compact devices: Integration of sensors into miniaturized and embedded systems involves packaging multiple sensing elements within constrained physical spaces. This approach focuses on compact design methodologies, including sensor placement optimization, thermal management, and electromagnetic interference mitigation. The integration strategy encompasses both hardware miniaturization and software optimization to maintain sensing performance while reducing overall system footprint.
- Sensor calibration and signal processing integration: Integrated sensor systems require sophisticated calibration mechanisms and signal processing algorithms to ensure measurement accuracy. This involves implementing automatic calibration routines, noise reduction techniques, and adaptive filtering methods that compensate for sensor drift and environmental variations. The integration includes both hardware-level signal conditioning and software-based processing algorithms that work together to enhance sensor output quality and reliability.
- Wireless and IoT sensor network integration: Integration of sensors into wireless networks and Internet of Things ecosystems enables distributed sensing capabilities and remote monitoring. This encompasses wireless communication protocols, network topology design, and cloud connectivity solutions that allow sensors to operate as part of larger networked systems. The integration framework addresses power management, data security, and scalability challenges inherent in wireless sensor deployments.
02 Sensor interface and communication protocols
Effective sensor integration requires standardized interfaces and communication protocols to enable seamless data exchange between sensors and processing units. This includes hardware interfaces, signal conditioning circuits, and digital communication standards that facilitate plug-and-play sensor connectivity. The integration framework supports various communication methods including wired and wireless protocols, ensuring compatibility across different sensor platforms and enabling scalable system architectures.Expand Specific Solutions03 Embedded sensor integration in compact devices
Integration of sensors into compact form factors involves miniaturization techniques and embedded system design. This approach focuses on incorporating multiple sensing elements within limited physical spaces while maintaining performance and reliability. The integration methodology addresses challenges such as electromagnetic interference, thermal management, and power consumption in space-constrained applications, enabling deployment in portable and wearable devices.Expand Specific Solutions04 Sensor calibration and signal processing integration
Integration of calibration mechanisms and signal processing algorithms ensures accurate and reliable sensor measurements. This involves implementing self-calibration routines, error correction algorithms, and adaptive filtering techniques within the integrated sensor system. The processing framework compensates for sensor drift, environmental variations, and manufacturing tolerances, providing consistent output quality across operational conditions and extending sensor lifespan.Expand Specific Solutions05 Intelligent sensor networks and distributed integration
Distributed sensor integration creates networked sensing systems where multiple sensor nodes collaborate to monitor environments or processes. This architecture enables spatial coverage, fault tolerance, and collaborative data processing through distributed algorithms. The integration platform supports dynamic node configuration, network topology management, and coordinated sensing strategies that optimize overall system performance while managing communication bandwidth and power resources across the sensor network.Expand Specific Solutions
Leading Companies in Mobile and Fixed Robotics
The sensor integration landscape for mobile manipulation versus fixed systems represents a rapidly evolving market driven by increasing automation demands across industries. The sector is experiencing significant growth, with established players like Bosch, InvenSense, and Qualcomm leading consumer and automotive sensor technologies, while companies such as KUKA, OMRON, and DENSO advance industrial automation solutions. Technology maturity varies considerably - fixed system sensors demonstrate high reliability in controlled environments, whereas mobile manipulation sensors face complex challenges in dynamic settings. Key differentiators include real-time processing capabilities, environmental adaptability, and integration complexity. Companies like Auris Health and Toyota are pioneering advanced mobile manipulation applications, while traditional automation leaders continue optimizing fixed system performance, creating a competitive landscape where technological convergence and specialization coexist.
Robert Bosch GmbH
Technical Solution: Bosch has developed comprehensive sensor integration solutions for both mobile manipulation and fixed systems, leveraging their extensive MEMS sensor portfolio including accelerometers, gyroscopes, and pressure sensors. Their approach focuses on multi-sensor fusion algorithms that adapt to different operational contexts - for mobile manipulation systems, they emphasize real-time sensor calibration and dynamic environmental adaptation, while for fixed systems, they prioritize long-term stability and precision. Their sensor integration platform utilizes advanced filtering techniques and machine learning algorithms to optimize sensor data processing based on system mobility requirements. The company's solutions feature modular sensor architectures that can be configured for either mobile or stationary applications, with specialized communication protocols and power management systems tailored to each use case.
Strengths: Extensive MEMS sensor expertise and proven multi-sensor fusion capabilities across automotive and industrial applications. Weaknesses: Solutions may be over-engineered for simple applications, potentially increasing cost and complexity.
QUALCOMM, Inc.
Technical Solution: Qualcomm's sensor integration approach leverages their Snapdragon platforms and specialized sensor processing units to handle complex sensor fusion tasks for both mobile manipulation and fixed systems. Their solution architecture incorporates dedicated sensor hubs that can process data from multiple sensors simultaneously while managing power consumption efficiently. For mobile manipulation systems, they focus on low-latency sensor processing and adaptive algorithms that account for dynamic positioning and orientation changes. Their fixed system solutions emphasize high-precision sensor calibration and long-term drift compensation. The platform includes advanced signal processing capabilities, machine learning acceleration, and wireless connectivity options that enable seamless integration across different system architectures. Their sensor integration framework supports various sensor types including IMUs, cameras, LiDAR, and environmental sensors.
Strengths: Advanced signal processing capabilities and efficient power management through dedicated sensor hubs. Weaknesses: Primarily focused on mobile and consumer applications, may lack specialized industrial sensor integration features.
Core Patents in Multi-Sensor Robotic Integration
Sensor integration and mounting device, and vehicle
PatentWO2023142216A1
Innovation
- An integrated sensor installation device is designed, including an integrated mounting plate and a sensor mounting bracket group. The bracket group is detachably fixed on the mounting plate through the connecting end and is equipped with horizontal adjustment, pitch angle adjustment and multi-directional adjustment components, allowing the sensor to be Flexible installation and adjustment.




Mobile manipulation system with vertical lift
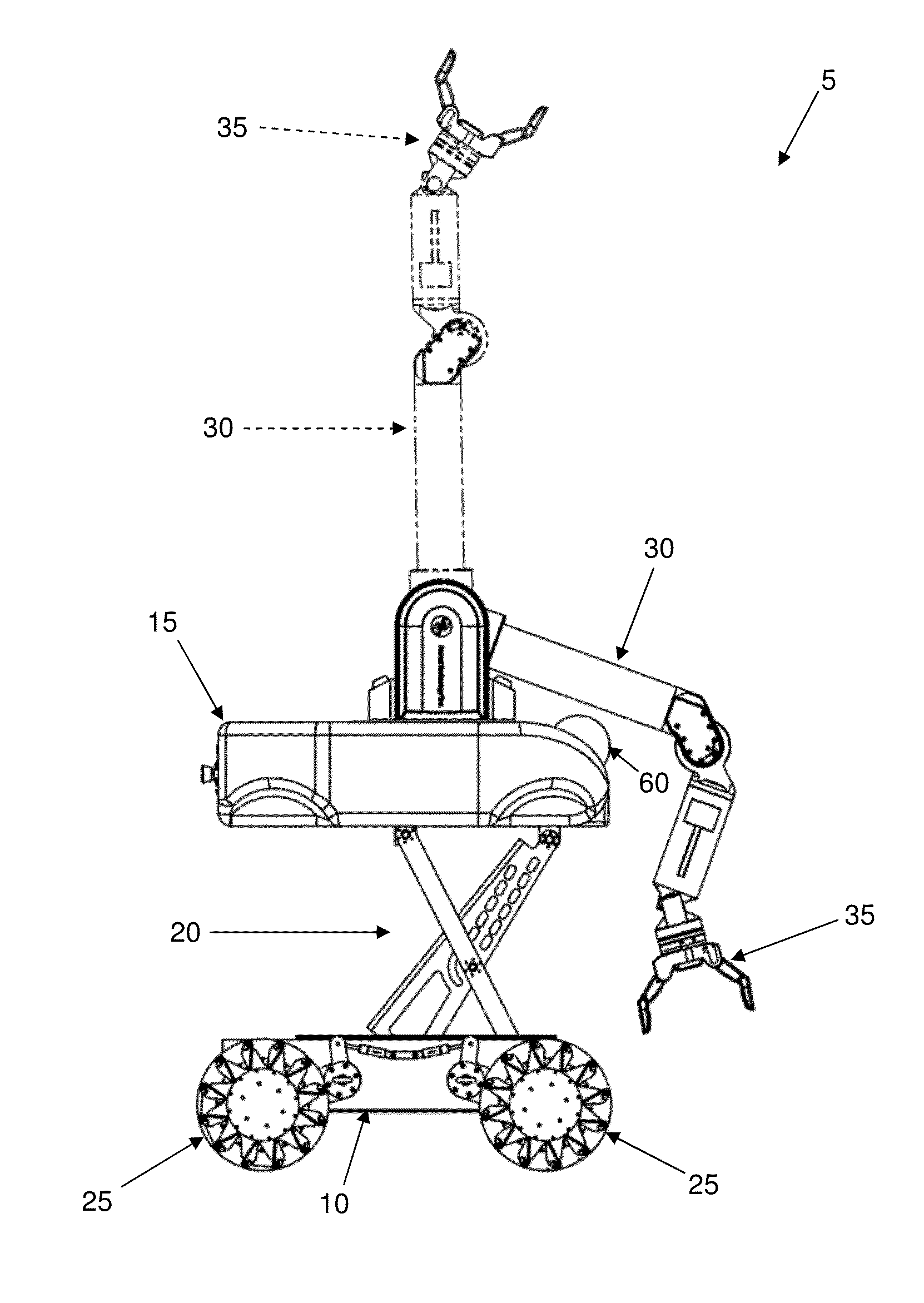
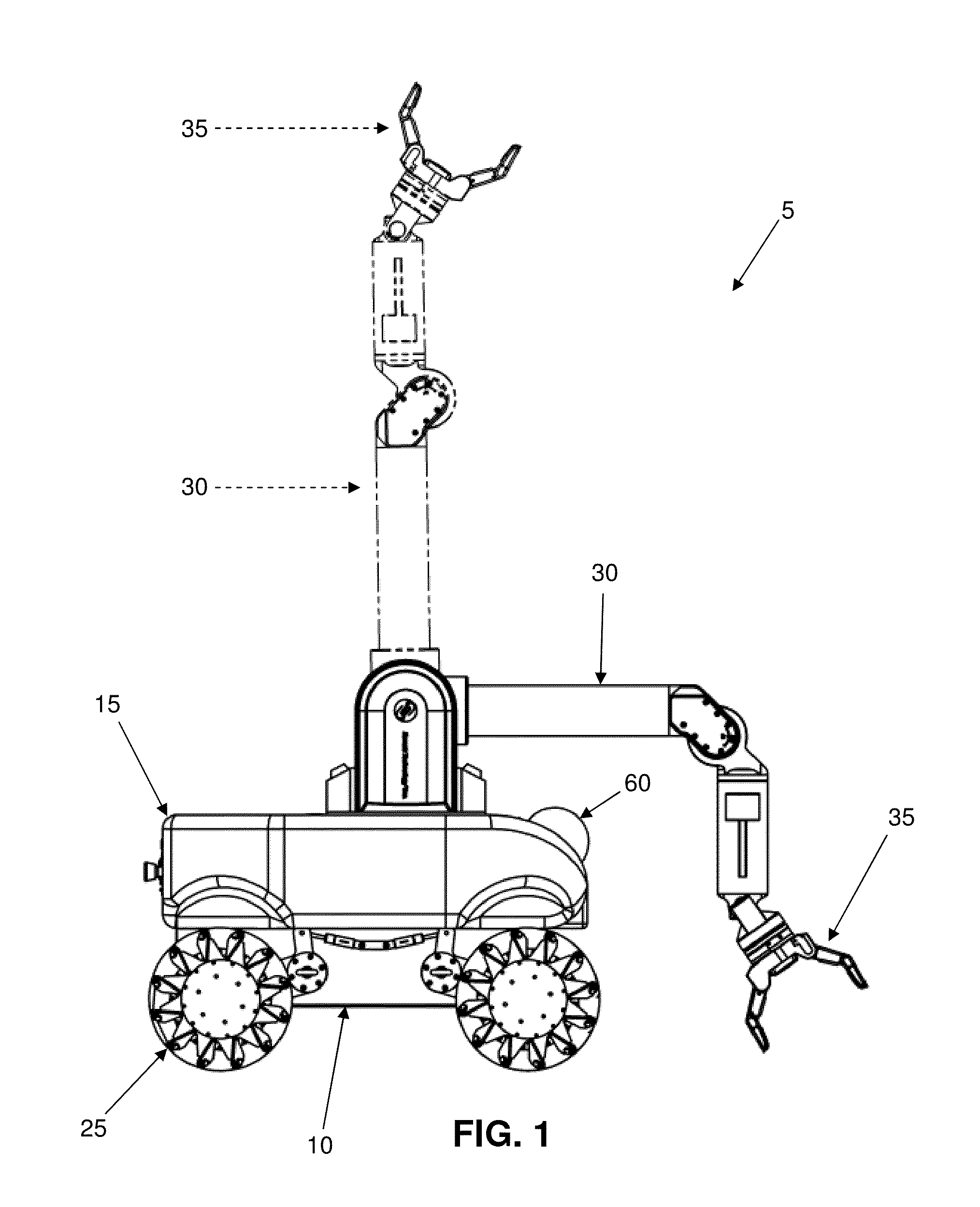
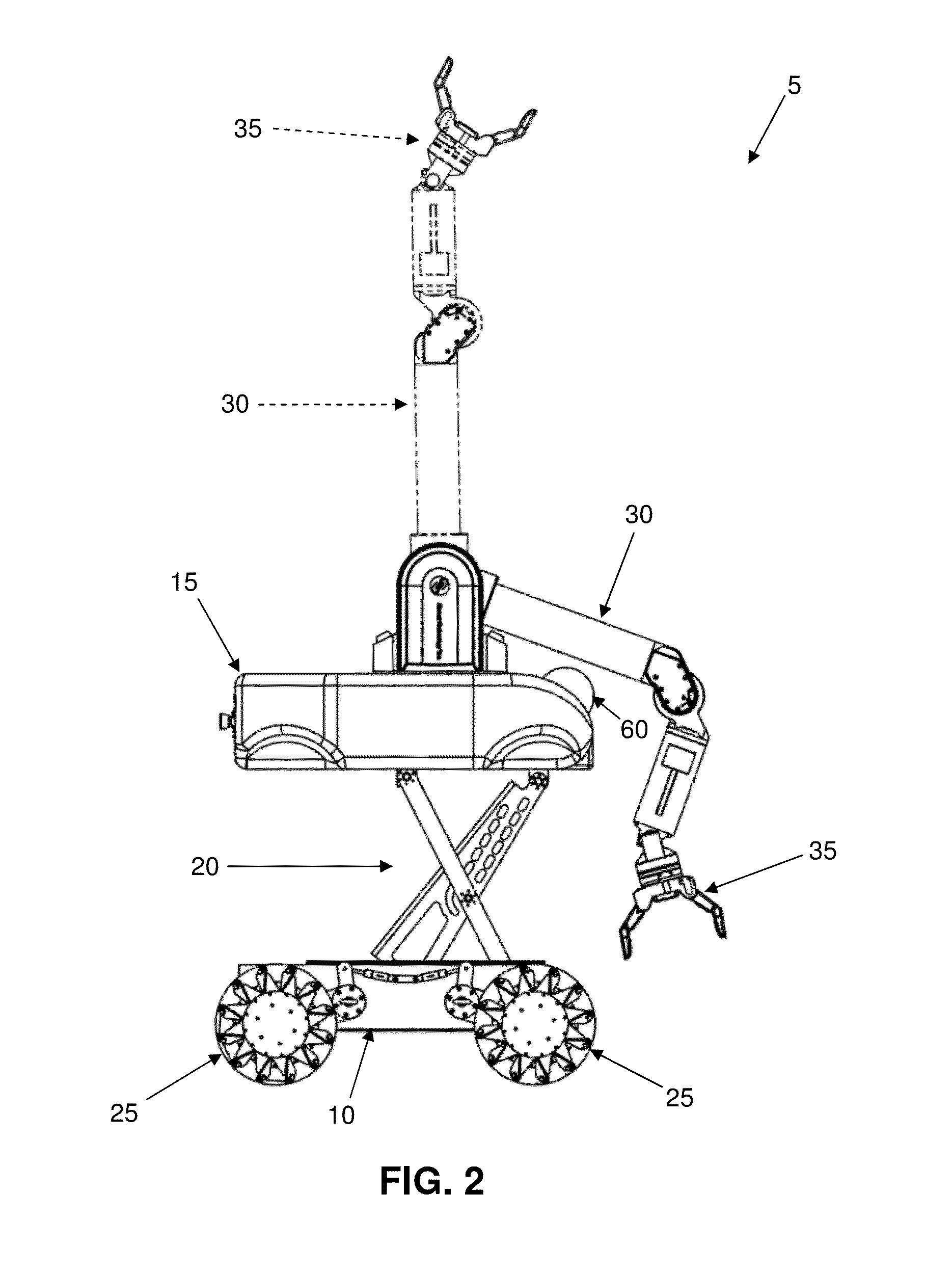
PatentInactiveUS20150050111A1
Innovation
- A mobile manipulation system with a mobile base equipped with an elevator mechanism, such as a scissors lift, that supports a platform with a robotic manipulator arm, allowing vertical movement to expand the system's reach from floor to overhead cabinets.

Safety Standards for Robotic Sensor Systems
Safety standards for robotic sensor systems represent a critical framework that governs the design, implementation, and operation of sensing technologies across different robotic platforms. These standards establish fundamental requirements for sensor reliability, data integrity, and fail-safe mechanisms that ensure safe human-robot interaction and operational continuity.
The International Organization for Standardization (ISO) 10218 series and ISO 13482 provide comprehensive guidelines for industrial and service robots respectively, with specific provisions for sensor integration requirements. These standards mandate redundant sensing capabilities, particularly for safety-critical applications where sensor failure could result in harm to humans or equipment damage. The standards also specify minimum response times for emergency stop systems and define acceptable sensor accuracy thresholds.
Mobile manipulation systems face unique safety challenges due to their dynamic operating environments and proximity to humans. Safety standards for these systems emphasize the implementation of multiple sensor modalities including LiDAR, cameras, force-torque sensors, and proximity detectors. The standards require real-time environmental monitoring capabilities and mandate that mobile systems maintain continuous awareness of their surroundings through sensor fusion techniques.
Fixed robotic systems operate under different safety paradigms, with standards focusing on workspace containment and predictable operational boundaries. Safety requirements for fixed systems typically emphasize barrier detection, workspace monitoring, and collaborative operation protocols when humans enter the robot's operational zone. The standards specify minimum safety distances and require implementation of light curtains or area scanners for perimeter protection.
Functional safety standards such as IEC 61508 and its robotics-specific derivative ISO 13849 establish Safety Integrity Levels (SIL) that determine the required reliability and performance of safety-related sensor systems. These standards mandate systematic hazard analysis and risk assessment procedures, requiring manufacturers to demonstrate that sensor systems meet specified probability of failure thresholds.
Emerging standards are addressing advanced sensor technologies including artificial intelligence-based perception systems and adaptive sensing capabilities. These evolving frameworks focus on validation methodologies for machine learning algorithms in safety-critical applications and establish requirements for sensor system transparency and explainability in decision-making processes.
The International Organization for Standardization (ISO) 10218 series and ISO 13482 provide comprehensive guidelines for industrial and service robots respectively, with specific provisions for sensor integration requirements. These standards mandate redundant sensing capabilities, particularly for safety-critical applications where sensor failure could result in harm to humans or equipment damage. The standards also specify minimum response times for emergency stop systems and define acceptable sensor accuracy thresholds.
Mobile manipulation systems face unique safety challenges due to their dynamic operating environments and proximity to humans. Safety standards for these systems emphasize the implementation of multiple sensor modalities including LiDAR, cameras, force-torque sensors, and proximity detectors. The standards require real-time environmental monitoring capabilities and mandate that mobile systems maintain continuous awareness of their surroundings through sensor fusion techniques.
Fixed robotic systems operate under different safety paradigms, with standards focusing on workspace containment and predictable operational boundaries. Safety requirements for fixed systems typically emphasize barrier detection, workspace monitoring, and collaborative operation protocols when humans enter the robot's operational zone. The standards specify minimum safety distances and require implementation of light curtains or area scanners for perimeter protection.
Functional safety standards such as IEC 61508 and its robotics-specific derivative ISO 13849 establish Safety Integrity Levels (SIL) that determine the required reliability and performance of safety-related sensor systems. These standards mandate systematic hazard analysis and risk assessment procedures, requiring manufacturers to demonstrate that sensor systems meet specified probability of failure thresholds.
Emerging standards are addressing advanced sensor technologies including artificial intelligence-based perception systems and adaptive sensing capabilities. These evolving frameworks focus on validation methodologies for machine learning algorithms in safety-critical applications and establish requirements for sensor system transparency and explainability in decision-making processes.
Cost-Benefit Analysis of Integration Approaches
The cost-benefit analysis of sensor integration approaches reveals significant differences between mobile manipulation and fixed systems across multiple dimensions. Initial capital expenditure represents the most apparent distinction, with fixed systems typically requiring higher upfront investments due to extensive infrastructure development, permanent mounting structures, and comprehensive environmental modifications. Mobile manipulation systems, while featuring expensive robotic platforms, generally demand lower initial setup costs as they leverage existing infrastructure and require minimal environmental modifications.
Operational expenditure patterns diverge substantially between the two approaches. Fixed systems demonstrate predictable maintenance schedules with lower per-unit operational costs due to optimized sensor placement and reduced wear from environmental exposure. However, mobile systems incur higher ongoing costs through battery replacement, increased mechanical wear from movement, and more frequent calibration requirements. The mobility advantage comes at the expense of higher energy consumption and accelerated component degradation.
Scalability economics favor different approaches depending on operational scope. Fixed systems excel in high-throughput, repetitive applications where the cost per operation decreases significantly with volume. The amortization of infrastructure costs across numerous operations creates favorable unit economics. Conversely, mobile manipulation systems provide superior cost efficiency for diverse, low-volume tasks across multiple locations, eliminating the need for duplicate fixed installations.
Return on investment timelines vary considerably based on application requirements. Fixed systems typically achieve break-even points within 18-24 months for high-utilization scenarios, benefiting from consistent performance and minimal downtime. Mobile systems may require 24-36 months to achieve comparable returns, though they offer greater flexibility for revenue diversification across multiple applications and locations.
Risk assessment reveals contrasting vulnerability profiles. Fixed systems face concentrated risks from single-point failures but benefit from controlled environments and predictable operating conditions. Mobile systems distribute risks across multiple deployment scenarios while introducing variables such as navigation failures, environmental hazards, and increased security vulnerabilities. Insurance and maintenance contracts reflect these risk differentials, with mobile systems commanding premium rates due to their exposure to diverse operational environments and higher probability of damage incidents.
Operational expenditure patterns diverge substantially between the two approaches. Fixed systems demonstrate predictable maintenance schedules with lower per-unit operational costs due to optimized sensor placement and reduced wear from environmental exposure. However, mobile systems incur higher ongoing costs through battery replacement, increased mechanical wear from movement, and more frequent calibration requirements. The mobility advantage comes at the expense of higher energy consumption and accelerated component degradation.
Scalability economics favor different approaches depending on operational scope. Fixed systems excel in high-throughput, repetitive applications where the cost per operation decreases significantly with volume. The amortization of infrastructure costs across numerous operations creates favorable unit economics. Conversely, mobile manipulation systems provide superior cost efficiency for diverse, low-volume tasks across multiple locations, eliminating the need for duplicate fixed installations.
Return on investment timelines vary considerably based on application requirements. Fixed systems typically achieve break-even points within 18-24 months for high-utilization scenarios, benefiting from consistent performance and minimal downtime. Mobile systems may require 24-36 months to achieve comparable returns, though they offer greater flexibility for revenue diversification across multiple applications and locations.
Risk assessment reveals contrasting vulnerability profiles. Fixed systems face concentrated risks from single-point failures but benefit from controlled environments and predictable operating conditions. Mobile systems distribute risks across multiple deployment scenarios while introducing variables such as navigation failures, environmental hazards, and increased security vulnerabilities. Insurance and maintenance contracts reflect these risk differentials, with mobile systems commanding premium rates due to their exposure to diverse operational environments and higher probability of damage incidents.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!