How ROS 2 Meets Real-Time Constraints On Resource-Limited MCUs?
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
ROS 2 Real-Time Evolution and Objectives
The evolution of ROS (Robot Operating System) has been marked by significant milestones since its inception in 2007. Originally developed at Stanford University and later maintained by Willow Garage, ROS 1 established itself as the de facto standard for robotics software development. However, it was primarily designed for networked workstations and lacked real-time capabilities essential for critical robotic applications.
ROS 2, introduced in 2017, represented a fundamental redesign aimed at addressing these limitations. The transition from ROS 1 to ROS 2 was driven by the growing demand for real-time performance in robotics applications, particularly in industrial automation, autonomous vehicles, and medical robotics where deterministic behavior is crucial. This evolution was characterized by the adoption of the Data Distribution Service (DDS) as the middleware, providing Quality of Service (QoS) policies that enable real-time communication.
The technical trajectory of ROS 2 has been guided by several key objectives. Foremost among these is achieving deterministic execution on resource-constrained microcontroller units (MCUs), which presents unique challenges due to limited processing power, memory, and energy resources. This objective necessitates optimizing the ROS 2 stack to function efficiently within these constraints while maintaining real-time guarantees.
Another critical objective in ROS 2's evolution has been the development of a real-time compatible executor model. The original single-threaded executor in ROS 2 was inadequate for real-time applications, leading to the development of multi-threaded and callback-group-based executors that can prioritize critical tasks and ensure deterministic execution even under high system loads.
Memory management represents another significant focus area in ROS 2's development for MCUs. The standard dynamic memory allocation mechanisms in C++ can introduce unpredictable latencies, which are unacceptable in real-time systems. Consequently, ROS 2 has evolved to incorporate static memory allocation strategies and memory pools that provide deterministic performance on resource-limited platforms.
The integration of real-time operating system (RTOS) capabilities has been a pivotal aspect of ROS 2's evolution. By supporting RTOSes like FreeRTOS and Zephyr, ROS 2 can leverage their scheduling mechanisms, priority inheritance protocols, and deterministic behavior to meet strict timing constraints on MCUs.
Looking forward, the technical objectives for ROS 2 on resource-limited MCUs include further reducing its memory footprint, enhancing energy efficiency, improving compilation techniques for embedded targets, and developing more sophisticated tools for analyzing and ensuring real-time performance. These objectives align with the broader trend toward more capable yet resource-efficient robotic systems that can operate reliably in time-critical applications.
ROS 2, introduced in 2017, represented a fundamental redesign aimed at addressing these limitations. The transition from ROS 1 to ROS 2 was driven by the growing demand for real-time performance in robotics applications, particularly in industrial automation, autonomous vehicles, and medical robotics where deterministic behavior is crucial. This evolution was characterized by the adoption of the Data Distribution Service (DDS) as the middleware, providing Quality of Service (QoS) policies that enable real-time communication.
The technical trajectory of ROS 2 has been guided by several key objectives. Foremost among these is achieving deterministic execution on resource-constrained microcontroller units (MCUs), which presents unique challenges due to limited processing power, memory, and energy resources. This objective necessitates optimizing the ROS 2 stack to function efficiently within these constraints while maintaining real-time guarantees.
Another critical objective in ROS 2's evolution has been the development of a real-time compatible executor model. The original single-threaded executor in ROS 2 was inadequate for real-time applications, leading to the development of multi-threaded and callback-group-based executors that can prioritize critical tasks and ensure deterministic execution even under high system loads.
Memory management represents another significant focus area in ROS 2's development for MCUs. The standard dynamic memory allocation mechanisms in C++ can introduce unpredictable latencies, which are unacceptable in real-time systems. Consequently, ROS 2 has evolved to incorporate static memory allocation strategies and memory pools that provide deterministic performance on resource-limited platforms.
The integration of real-time operating system (RTOS) capabilities has been a pivotal aspect of ROS 2's evolution. By supporting RTOSes like FreeRTOS and Zephyr, ROS 2 can leverage their scheduling mechanisms, priority inheritance protocols, and deterministic behavior to meet strict timing constraints on MCUs.
Looking forward, the technical objectives for ROS 2 on resource-limited MCUs include further reducing its memory footprint, enhancing energy efficiency, improving compilation techniques for embedded targets, and developing more sophisticated tools for analyzing and ensuring real-time performance. These objectives align with the broader trend toward more capable yet resource-efficient robotic systems that can operate reliably in time-critical applications.
Market Demand for Real-Time Robotics on MCUs
The real-time robotics market on microcontroller units (MCUs) is experiencing significant growth driven by the increasing demand for compact, cost-effective robotic solutions across multiple industries. This market segment represents the intersection of resource-constrained computing and time-critical robotic applications, creating unique opportunities and challenges for technology providers.
Industrial automation represents the largest current market for real-time MCU-based robotics, with manufacturing facilities increasingly adopting collaborative robots and autonomous mobile robots that require deterministic performance despite limited computing resources. The market for these solutions is projected to grow substantially as manufacturers seek to implement Industry 4.0 concepts while managing implementation costs.
Consumer robotics constitutes another rapidly expanding segment, with household robots, toys, and personal assistants requiring real-time capabilities at consumer-friendly price points. These applications typically operate under strict cost constraints that necessitate the use of MCUs rather than more powerful computing platforms, yet still demand responsive and predictable behavior.
The healthcare sector presents significant growth potential for real-time MCU robotics, particularly in applications such as rehabilitation devices, assistive technologies, and portable diagnostic equipment. These applications require both the reliability of real-time performance and the power efficiency of MCU platforms to ensure patient safety and device longevity.
Drone and unmanned vehicle markets are driving demand for lightweight, power-efficient control systems with real-time guarantees. As these platforms become smaller and more specialized, the ability to deliver deterministic performance on MCUs becomes increasingly valuable for maintaining flight stability and navigation precision.
Market research indicates that customers in these segments prioritize several key factors: deterministic response times, certification capabilities for safety-critical applications, power efficiency, and cost-effectiveness. The combination of these requirements creates a distinct market niche that cannot be adequately served by either traditional high-performance robotics platforms or non-real-time MCU solutions.
The geographical distribution of demand shows particular strength in regions with established manufacturing bases undergoing automation transformations, including East Asia, North America, and Western Europe. Emerging markets are showing accelerated adoption rates as they implement modern manufacturing facilities that incorporate robotics from the outset.
Overall market trends suggest that the convergence of ROS 2's sophisticated capabilities with real-time performance on resource-constrained MCUs addresses a critical gap in the robotics ecosystem, enabling new categories of products and applications that were previously impractical due to cost, power, or size constraints.
Industrial automation represents the largest current market for real-time MCU-based robotics, with manufacturing facilities increasingly adopting collaborative robots and autonomous mobile robots that require deterministic performance despite limited computing resources. The market for these solutions is projected to grow substantially as manufacturers seek to implement Industry 4.0 concepts while managing implementation costs.
Consumer robotics constitutes another rapidly expanding segment, with household robots, toys, and personal assistants requiring real-time capabilities at consumer-friendly price points. These applications typically operate under strict cost constraints that necessitate the use of MCUs rather than more powerful computing platforms, yet still demand responsive and predictable behavior.
The healthcare sector presents significant growth potential for real-time MCU robotics, particularly in applications such as rehabilitation devices, assistive technologies, and portable diagnostic equipment. These applications require both the reliability of real-time performance and the power efficiency of MCU platforms to ensure patient safety and device longevity.
Drone and unmanned vehicle markets are driving demand for lightweight, power-efficient control systems with real-time guarantees. As these platforms become smaller and more specialized, the ability to deliver deterministic performance on MCUs becomes increasingly valuable for maintaining flight stability and navigation precision.
Market research indicates that customers in these segments prioritize several key factors: deterministic response times, certification capabilities for safety-critical applications, power efficiency, and cost-effectiveness. The combination of these requirements creates a distinct market niche that cannot be adequately served by either traditional high-performance robotics platforms or non-real-time MCU solutions.
The geographical distribution of demand shows particular strength in regions with established manufacturing bases undergoing automation transformations, including East Asia, North America, and Western Europe. Emerging markets are showing accelerated adoption rates as they implement modern manufacturing facilities that incorporate robotics from the outset.
Overall market trends suggest that the convergence of ROS 2's sophisticated capabilities with real-time performance on resource-constrained MCUs addresses a critical gap in the robotics ecosystem, enabling new categories of products and applications that were previously impractical due to cost, power, or size constraints.
Resource Constraints and Technical Challenges in ROS 2
Implementing ROS 2 on resource-constrained microcontroller units (MCUs) presents significant technical challenges due to the inherent limitations of these devices. MCUs typically operate with severely restricted computational resources, including limited processing power (often single-core processors running at frequencies below 200 MHz), minimal RAM (frequently less than 512 KB), and constrained flash storage (usually a few megabytes). These hardware limitations directly conflict with ROS 2's architecture, which was primarily designed for more powerful computing environments.
The memory footprint of ROS 2 poses a critical challenge. The core ROS 2 framework, including DDS middleware implementations like Fast DDS or Cyclone DDS, requires substantial RAM for operation. Even minimal ROS 2 nodes can consume several megabytes of memory, which may exceed the total available RAM on many MCUs. This creates a fundamental constraint when attempting to implement real-time robotics applications that require multiple nodes and communication channels.
Real-time performance requirements further complicate implementation on resource-limited MCUs. Deterministic behavior is essential for safety-critical robotics applications, yet achieving consistent timing with limited processing power is challenging. The standard DDS middleware implementations in ROS 2 are not optimized for real-time performance on constrained devices, leading to unpredictable latency and jitter that can compromise system reliability and safety.
Power consumption represents another significant constraint. Many MCU-based robotic systems operate on battery power, making energy efficiency crucial. The computational overhead of ROS 2, particularly the DDS middleware layer, can lead to increased power consumption that may be prohibitive for long-running or mobile applications. This necessitates careful optimization of both the ROS 2 framework and application code to minimize energy usage while maintaining functionality.
Network bandwidth limitations also impact ROS 2 deployment on MCUs. Many microcontrollers have restricted network capabilities, often limited to low-bandwidth protocols like CAN bus or low-power wireless technologies. ROS 2's communication model, which relies on potentially high-bandwidth message passing, must be adapted to function within these constraints without compromising essential functionality.
The development environment for MCUs presents additional challenges. Traditional MCU programming relies on specialized toolchains and often lacks the rich development ecosystem available for desktop systems. Integrating ROS 2 into these constrained development workflows requires significant adaptation of build systems, debugging tools, and deployment processes, creating barriers to adoption for developers accustomed to standard ROS 2 workflows on more powerful systems.
The memory footprint of ROS 2 poses a critical challenge. The core ROS 2 framework, including DDS middleware implementations like Fast DDS or Cyclone DDS, requires substantial RAM for operation. Even minimal ROS 2 nodes can consume several megabytes of memory, which may exceed the total available RAM on many MCUs. This creates a fundamental constraint when attempting to implement real-time robotics applications that require multiple nodes and communication channels.
Real-time performance requirements further complicate implementation on resource-limited MCUs. Deterministic behavior is essential for safety-critical robotics applications, yet achieving consistent timing with limited processing power is challenging. The standard DDS middleware implementations in ROS 2 are not optimized for real-time performance on constrained devices, leading to unpredictable latency and jitter that can compromise system reliability and safety.
Power consumption represents another significant constraint. Many MCU-based robotic systems operate on battery power, making energy efficiency crucial. The computational overhead of ROS 2, particularly the DDS middleware layer, can lead to increased power consumption that may be prohibitive for long-running or mobile applications. This necessitates careful optimization of both the ROS 2 framework and application code to minimize energy usage while maintaining functionality.
Network bandwidth limitations also impact ROS 2 deployment on MCUs. Many microcontrollers have restricted network capabilities, often limited to low-bandwidth protocols like CAN bus or low-power wireless technologies. ROS 2's communication model, which relies on potentially high-bandwidth message passing, must be adapted to function within these constraints without compromising essential functionality.
The development environment for MCUs presents additional challenges. Traditional MCU programming relies on specialized toolchains and often lacks the rich development ecosystem available for desktop systems. Integrating ROS 2 into these constrained development workflows requires significant adaptation of build systems, debugging tools, and deployment processes, creating barriers to adoption for developers accustomed to standard ROS 2 workflows on more powerful systems.
Current Real-Time Solutions for ROS 2 on MCUs
01 Real-time scheduling mechanisms for ROS 2
ROS 2 implements various real-time scheduling mechanisms to meet timing constraints in robotic systems. These include priority-based scheduling, deadline-driven execution, and time-triggered communication patterns. By utilizing these scheduling mechanisms, ROS 2 can provide deterministic behavior and guarantee response times for critical tasks, which is essential for applications requiring real-time performance such as autonomous vehicles and industrial robots.- Real-time scheduling mechanisms for ROS 2: ROS 2 implements various scheduling mechanisms to meet real-time constraints in robotic systems. These include priority-based scheduling, deadline-based scheduling, and reservation-based approaches that ensure critical tasks receive necessary computational resources. These scheduling mechanisms help manage task execution to maintain temporal predictability and minimize latency in time-sensitive robotic applications.
- Communication middleware optimizations for deterministic performance: Optimizations in ROS 2's communication middleware (DDS) enable deterministic performance for real-time applications. These include quality of service (QoS) policies, zero-copy data transfer mechanisms, and configurable communication patterns that reduce latency and jitter. Such optimizations ensure reliable and timely message delivery between nodes in distributed robotic systems operating under strict timing constraints.
- Hardware acceleration and resource isolation techniques: Hardware acceleration and resource isolation techniques are employed in ROS 2 to meet real-time constraints. These include dedicated processing units for time-critical tasks, memory partitioning to prevent interference, and hardware-software co-design approaches. By isolating critical components from non-critical ones, these techniques minimize unpredictable delays and ensure consistent performance in real-time robotic applications.
- Real-time operating system integration with ROS 2: Integration of ROS 2 with real-time operating systems (RTOS) provides deterministic behavior for time-critical applications. This integration involves kernel modifications, real-time patches, and specialized execution environments that guarantee bounded response times. By leveraging RTOS capabilities, ROS 2 applications can achieve predictable execution patterns necessary for safety-critical robotic systems.
- Performance monitoring and analysis tools for real-time ROS 2: Specialized tools for monitoring and analyzing real-time performance in ROS 2 systems help identify and resolve timing issues. These include tracing frameworks, latency analyzers, and visualization tools that provide insights into system behavior under various conditions. Such tools enable developers to verify compliance with real-time constraints and optimize system performance for time-critical robotic applications.
02 Middleware optimization for real-time communication
The middleware layer in ROS 2 has been optimized to support real-time communication requirements. This includes improvements to the Data Distribution Service (DDS) implementation, reduced latency in message passing, and deterministic communication patterns. These optimizations ensure that data can be exchanged between nodes with predictable timing, which is crucial for maintaining real-time constraints in complex robotic systems.Expand Specific Solutions03 Hardware acceleration for ROS 2 real-time processing
Hardware acceleration techniques are employed to enhance ROS 2's real-time capabilities. These include utilizing specialized processors, FPGA implementations, and GPU acceleration for computationally intensive tasks. By offloading processing to dedicated hardware, ROS 2 applications can achieve lower latency and more deterministic execution, meeting strict timing requirements even for complex algorithms like perception and motion planning.Expand Specific Solutions04 Real-time operating system integration with ROS 2
ROS 2 can be integrated with real-time operating systems (RTOS) to provide stronger timing guarantees. This integration allows ROS 2 applications to leverage RTOS features such as deterministic task scheduling, interrupt handling, and resource management. By running ROS 2 on an RTOS, developers can ensure that critical robotic functions meet their timing constraints even under high system load.Expand Specific Solutions05 Performance monitoring and analysis tools for ROS 2
Specialized tools have been developed for monitoring and analyzing the real-time performance of ROS 2 systems. These tools provide capabilities for measuring latency, jitter, and execution times of ROS 2 nodes and communication pathways. By using these monitoring tools, developers can identify bottlenecks, validate timing requirements, and optimize their ROS 2 applications to meet real-time constraints in production environments.Expand Specific Solutions
Key Organizations in Real-Time ROS 2 Ecosystem
The ROS 2 real-time implementation on resource-limited MCUs market is currently in an early growth phase, characterized by increasing adoption across industrial automation and embedded systems. The market size is expanding as IoT and edge computing applications drive demand for lightweight, deterministic frameworks. From a technical maturity perspective, the ecosystem shows varying levels of development. Companies like Mitsubishi Electric and Siemens are leveraging their industrial automation expertise to advance ROS 2 real-time capabilities, while Rapyuta Robotics and Rainbow Robotics focus on cloud-robotics integration solutions. Academic institutions including Zhejiang University and Beihang University are contributing significant research to overcome resource constraints. Technology firms such as Huawei Cloud and Inspur are developing infrastructure solutions that enable ROS 2 deployment on constrained hardware, addressing the growing need for deterministic performance in edge computing applications.
Siemens AG
Technical Solution: Siemens AG has developed an industrial-grade ROS 2 implementation for resource-constrained MCUs focused on meeting strict real-time requirements in manufacturing environments. Their approach centers on a deterministic computing model that guarantees bounded response times for critical control tasks. Siemens has created a specialized real-time executor for ROS 2 that implements rate-monotonic scheduling to ensure high-priority tasks meet their deadlines even under system load. Their solution includes a memory-optimized DDS implementation that reduces RAM requirements by up to 60% compared to standard ROS 2 installations while maintaining communication reliability. Siemens has also developed hardware-specific optimizations for industrial MCUs, including zero-copy inter-process communication mechanisms and cache-aware memory management to minimize latency. The company's implementation features a lightweight security layer that provides authentication and encryption without compromising real-time performance, critical for industrial applications where both security and timing guarantees are essential.
Strengths: Industrial-grade reliability with proven deployment in manufacturing environments; excellent deterministic performance with formal timing guarantees. Weaknesses: Optimization focuses primarily on industrial use cases which may limit applicability in other domains; implementation may require specialized industrial hardware for optimal performance.
Nokia Technologies Oy
Technical Solution: Nokia Technologies has developed a telecommunications-focused ROS 2 implementation for resource-limited MCUs that emphasizes predictable latency and high reliability. Their approach centers on a real-time operating system (RTOS) integration layer that provides deterministic scheduling for ROS 2 nodes on constrained devices. Nokia has created a specialized middleware implementation that reduces the memory footprint of DDS while maintaining compatibility with the ROS 2 communication model. Their solution features a priority-based executor that ensures critical tasks receive appropriate CPU time even on single-core MCUs with limited processing power. Nokia has implemented an efficient message serialization system that minimizes both memory usage and processing overhead during node communications. Additionally, their implementation includes power management optimizations that balance real-time performance requirements with energy efficiency, crucial for battery-powered robotic devices. Nokia's solution has been validated on MCUs with as little as 256KB RAM while maintaining sub-millisecond response times for critical control loops.
Strengths: Exceptional focus on communication reliability and deterministic performance; well-optimized for power-constrained applications. Weaknesses: Telecommunications-specific optimizations may not translate perfectly to all robotics use cases; implementation complexity requires significant expertise to deploy effectively.
Critical Technologies for ROS 2 Real-Time Performance
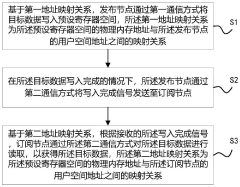
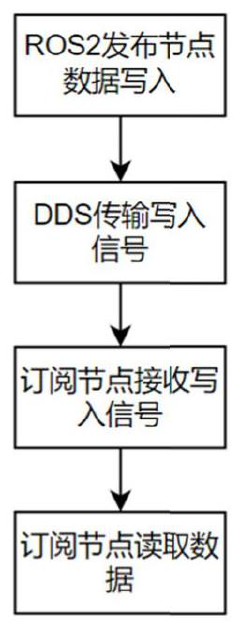
ROS2 high-speed message transmission method, system, device and medium
PatentPendingCN117793192A
Innovation
- By establishing an address mapping relationship between the physical memory address and the user space address based on the preset register space in the ROS2 system, using faster communication methods to write and read data, and combining the DDS communication method to send the write completion signal, it is realized The efficiency of data transmission is improved.


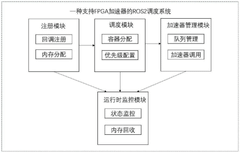
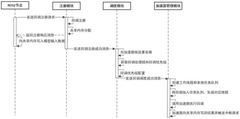
ROS2 scheduling system supporting FPGA accelerator
PatentPendingCN118838693A
Innovation
- Design the registration module, scheduling module, accelerator management module and runtime monitoring module to realize priority collaborative mapping of the callback processing chain and the accelerator execution flow, and ensure timely access to accelerator resources by the high-priority callback processing chain through a two-level priority scheduling mechanism.
Benchmarking Methodologies for ROS 2 Real-Time Performance
To effectively evaluate ROS 2's real-time performance on resource-constrained MCUs, standardized benchmarking methodologies are essential. These methodologies must address the unique challenges of embedded systems while providing reliable metrics for comparison across different implementations and hardware platforms.
Latency measurement forms the cornerstone of real-time performance benchmarking. For ROS 2 on MCUs, this involves measuring end-to-end communication delays, including message publication, middleware processing, and subscription handling. Specialized tools like Tracetools and LTTng have been adapted for resource-limited environments to capture timing data with minimal overhead.
Jitter analysis represents another critical benchmark, focusing on the variability in execution times rather than absolute latency. In real-time systems, predictability often outweighs raw speed, making jitter measurements particularly valuable for evaluating deterministic behavior. Standard deviation and worst-case execution time (WCET) analysis provide quantitative metrics for assessing timing consistency.
Resource utilization benchmarks must account for the severe constraints of MCU environments. Memory footprint analysis should examine both static allocation and dynamic memory usage patterns during typical operation cycles. CPU utilization benchmarks need to measure both average and peak loads, with particular attention to interrupt handling performance and context switching overhead.
Scalability testing methodologies evaluate how performance metrics change as system complexity increases. This involves progressively adding nodes, topics, and message types while monitoring system behavior. For MCUs, these tests must be carefully designed to identify breaking points before deployment in production environments.
Comparative benchmarking approaches enable meaningful evaluation across different ROS 2 DDS implementations (such as Micro XRCE-DDS, FastDDS-micro) and hardware platforms. Standardized test scenarios and workloads ensure fair comparisons, while normalized metrics account for hardware differences.
Long-term stability testing methodologies assess performance degradation over extended operation periods. These tests identify memory leaks, resource exhaustion patterns, and timing drift that might only emerge after hours or days of continuous operation—critical factors for embedded systems expected to run unattended for long periods.
Reproducibility represents a fundamental requirement for all benchmarking methodologies. This necessitates detailed documentation of hardware configurations, software versions, compilation flags, and environmental conditions. Open-source benchmark suites specifically designed for ROS 2 on MCUs are emerging to facilitate standardized testing across the community.
Latency measurement forms the cornerstone of real-time performance benchmarking. For ROS 2 on MCUs, this involves measuring end-to-end communication delays, including message publication, middleware processing, and subscription handling. Specialized tools like Tracetools and LTTng have been adapted for resource-limited environments to capture timing data with minimal overhead.
Jitter analysis represents another critical benchmark, focusing on the variability in execution times rather than absolute latency. In real-time systems, predictability often outweighs raw speed, making jitter measurements particularly valuable for evaluating deterministic behavior. Standard deviation and worst-case execution time (WCET) analysis provide quantitative metrics for assessing timing consistency.
Resource utilization benchmarks must account for the severe constraints of MCU environments. Memory footprint analysis should examine both static allocation and dynamic memory usage patterns during typical operation cycles. CPU utilization benchmarks need to measure both average and peak loads, with particular attention to interrupt handling performance and context switching overhead.
Scalability testing methodologies evaluate how performance metrics change as system complexity increases. This involves progressively adding nodes, topics, and message types while monitoring system behavior. For MCUs, these tests must be carefully designed to identify breaking points before deployment in production environments.
Comparative benchmarking approaches enable meaningful evaluation across different ROS 2 DDS implementations (such as Micro XRCE-DDS, FastDDS-micro) and hardware platforms. Standardized test scenarios and workloads ensure fair comparisons, while normalized metrics account for hardware differences.
Long-term stability testing methodologies assess performance degradation over extended operation periods. These tests identify memory leaks, resource exhaustion patterns, and timing drift that might only emerge after hours or days of continuous operation—critical factors for embedded systems expected to run unattended for long periods.
Reproducibility represents a fundamental requirement for all benchmarking methodologies. This necessitates detailed documentation of hardware configurations, software versions, compilation flags, and environmental conditions. Open-source benchmark suites specifically designed for ROS 2 on MCUs are emerging to facilitate standardized testing across the community.
Safety Certification Considerations for Real-Time ROS 2
Safety certification for real-time ROS 2 implementations on resource-limited MCUs presents unique challenges that must be addressed to ensure deployment in safety-critical applications. The integration of ROS 2 with safety standards such as ISO 26262 for automotive, IEC 61508 for industrial systems, and DO-178C for avionics requires careful consideration of both the framework architecture and execution guarantees.
When implementing real-time ROS 2 on MCUs, safety certification processes must account for deterministic behavior verification. This includes comprehensive timing analysis to ensure that critical tasks meet their deadlines consistently, even under worst-case execution scenarios. The certification process typically requires formal verification methods to mathematically prove the temporal correctness of the system, which becomes particularly challenging on resource-constrained platforms where execution timing can vary based on memory access patterns and interrupt handling.
Memory management represents another critical certification concern. Traditional ROS 2 implementations rely on dynamic memory allocation, which introduces unpredictability that safety certifiers find problematic. For MCU deployments, certification often requires static memory allocation patterns with provable bounds on memory usage. This necessitates modifications to the standard ROS 2 memory management approach, potentially using pre-allocated memory pools with deterministic allocation strategies.
Fault tolerance mechanisms must be explicitly designed and verified for safety certification. This includes implementing redundancy where appropriate, error detection capabilities, and graceful degradation strategies when failures occur. On resource-limited MCUs, these mechanisms must be lightweight yet effective, often requiring innovative approaches to error containment without excessive resource consumption.
The certification process also demands comprehensive traceability between requirements, design elements, code implementation, and test cases. For ROS 2 on MCUs, this means establishing clear documentation of how real-time constraints are maintained throughout the system, particularly focusing on critical paths that could affect safety properties. This documentation burden can be substantial but is essential for certification approval.
Testing methodologies for safety certification extend beyond functional verification to include stress testing, fault injection, and boundary condition analysis. For real-time ROS 2 on MCUs, specialized testing frameworks may be required to verify timing behavior under various load conditions and to ensure that safety properties are maintained even when the system approaches resource limits.
Finally, tool qualification presents a significant consideration. Development tools used in creating certified systems, including compilers, static analyzers, and testing frameworks, must themselves meet certain qualification standards. This can limit the toolchain options available for ROS 2 development on MCUs, potentially requiring the use of specialized certified development environments rather than standard open-source tools.
When implementing real-time ROS 2 on MCUs, safety certification processes must account for deterministic behavior verification. This includes comprehensive timing analysis to ensure that critical tasks meet their deadlines consistently, even under worst-case execution scenarios. The certification process typically requires formal verification methods to mathematically prove the temporal correctness of the system, which becomes particularly challenging on resource-constrained platforms where execution timing can vary based on memory access patterns and interrupt handling.
Memory management represents another critical certification concern. Traditional ROS 2 implementations rely on dynamic memory allocation, which introduces unpredictability that safety certifiers find problematic. For MCU deployments, certification often requires static memory allocation patterns with provable bounds on memory usage. This necessitates modifications to the standard ROS 2 memory management approach, potentially using pre-allocated memory pools with deterministic allocation strategies.
Fault tolerance mechanisms must be explicitly designed and verified for safety certification. This includes implementing redundancy where appropriate, error detection capabilities, and graceful degradation strategies when failures occur. On resource-limited MCUs, these mechanisms must be lightweight yet effective, often requiring innovative approaches to error containment without excessive resource consumption.
The certification process also demands comprehensive traceability between requirements, design elements, code implementation, and test cases. For ROS 2 on MCUs, this means establishing clear documentation of how real-time constraints are maintained throughout the system, particularly focusing on critical paths that could affect safety properties. This documentation burden can be substantial but is essential for certification approval.
Testing methodologies for safety certification extend beyond functional verification to include stress testing, fault injection, and boundary condition analysis. For real-time ROS 2 on MCUs, specialized testing frameworks may be required to verify timing behavior under various load conditions and to ensure that safety properties are maintained even when the system approaches resource limits.
Finally, tool qualification presents a significant consideration. Development tools used in creating certified systems, including compilers, static analyzers, and testing frameworks, must themselves meet certain qualification standards. This can limit the toolchain options available for ROS 2 development on MCUs, potentially requiring the use of specialized certified development environments rather than standard open-source tools.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!