

ROS 2 Real-Time: Executors, rclcpp/rclc And Deterministic Scheduling
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
ROS 2 Real-Time Evolution and Objectives
The Robot Operating System (ROS) has evolved significantly since its inception in 2007, with ROS 2 representing a fundamental redesign aimed at addressing the limitations of its predecessor. The evolution toward real-time capabilities in ROS 2 has been driven by increasing demands from industrial automation, autonomous vehicles, and critical robotic applications where deterministic behavior is essential for safety and performance.
The original ROS architecture was not designed with real-time constraints in mind, utilizing a publish-subscribe communication model that prioritized flexibility over determinism. As robotics applications expanded into time-critical domains, this limitation became increasingly problematic, necessitating a comprehensive redesign that culminated in ROS 2.
ROS 2's architectural foundation is built upon the Data Distribution Service (DDS) middleware, which provides Quality of Service (QoS) policies that enable more predictable communication patterns. This shift represents a pivotal moment in the evolution of robotics middleware, allowing developers to specify communication requirements based on reliability, durability, and timing constraints.
The executor model introduced in ROS 2 serves as the central mechanism for managing callback execution, replacing the previous global callback queue approach. This evolution has progressed through several iterations, from the initial SingleThreadedExecutor and MultiThreadedExecutor to more sophisticated implementations designed specifically for real-time performance.
A significant milestone in this evolution was the introduction of the rclc (ROS Client Library for C) package, which implemented a deterministic executor specifically designed for resource-constrained systems and real-time applications. This development addressed the non-deterministic behavior observed in the standard rclcpp executors, particularly in scenarios requiring precise timing.
The technical objectives of ROS 2's real-time capabilities center around achieving predictable execution times, minimizing jitter, and ensuring deterministic scheduling of critical tasks. These objectives are essential for applications where missed deadlines could result in system failure or safety hazards.
Current development efforts focus on refining executor implementations to provide stronger guarantees regarding callback execution order and timing, implementing priority-based scheduling mechanisms that align with real-time operating system capabilities, and reducing overhead in the middleware layer to minimize latency in time-critical paths.
The ultimate goal is to establish ROS 2 as a robust platform for real-time robotics applications, capable of meeting stringent timing requirements while maintaining the flexibility and ease of use that made the original ROS successful in research and development environments.
The original ROS architecture was not designed with real-time constraints in mind, utilizing a publish-subscribe communication model that prioritized flexibility over determinism. As robotics applications expanded into time-critical domains, this limitation became increasingly problematic, necessitating a comprehensive redesign that culminated in ROS 2.
ROS 2's architectural foundation is built upon the Data Distribution Service (DDS) middleware, which provides Quality of Service (QoS) policies that enable more predictable communication patterns. This shift represents a pivotal moment in the evolution of robotics middleware, allowing developers to specify communication requirements based on reliability, durability, and timing constraints.
The executor model introduced in ROS 2 serves as the central mechanism for managing callback execution, replacing the previous global callback queue approach. This evolution has progressed through several iterations, from the initial SingleThreadedExecutor and MultiThreadedExecutor to more sophisticated implementations designed specifically for real-time performance.
A significant milestone in this evolution was the introduction of the rclc (ROS Client Library for C) package, which implemented a deterministic executor specifically designed for resource-constrained systems and real-time applications. This development addressed the non-deterministic behavior observed in the standard rclcpp executors, particularly in scenarios requiring precise timing.
The technical objectives of ROS 2's real-time capabilities center around achieving predictable execution times, minimizing jitter, and ensuring deterministic scheduling of critical tasks. These objectives are essential for applications where missed deadlines could result in system failure or safety hazards.
Current development efforts focus on refining executor implementations to provide stronger guarantees regarding callback execution order and timing, implementing priority-based scheduling mechanisms that align with real-time operating system capabilities, and reducing overhead in the middleware layer to minimize latency in time-critical paths.
The ultimate goal is to establish ROS 2 as a robust platform for real-time robotics applications, capable of meeting stringent timing requirements while maintaining the flexibility and ease of use that made the original ROS successful in research and development environments.
Market Demand for Deterministic Robotics Systems
The market for deterministic robotics systems has experienced significant growth in recent years, driven by increasing demands for reliability, safety, and performance in mission-critical applications. Industries such as manufacturing, healthcare, autonomous vehicles, aerospace, and defense require robotic systems that can guarantee response times and operational predictability under all circumstances.
Manufacturing sectors, particularly automotive and electronics assembly, represent the largest market segment for deterministic robotics systems. These industries require precise coordination between multiple robots and machinery with microsecond-level timing accuracy to ensure production quality and efficiency. Market research indicates that manufacturing companies implementing deterministic robotic systems have reported productivity improvements of up to 30% compared to traditional automation solutions.
The healthcare sector presents another rapidly expanding market for deterministic robotics. Surgical robots, rehabilitation systems, and automated medication dispensing require absolute timing guarantees to ensure patient safety. The market for medical robotics with real-time capabilities is projected to grow at a compound annual growth rate of 15% through 2028, significantly outpacing the broader robotics market.
Autonomous vehicle development has created substantial demand for deterministic computing frameworks. As vehicles incorporate more advanced driver assistance systems and move toward full autonomy, the need for guaranteed response times in perception, decision-making, and control systems becomes critical. Safety certification standards like ISO 26262 explicitly require deterministic behavior for safety-critical automotive systems.
The aerospace and defense sectors represent premium market segments where deterministic performance commands significant price premiums. These applications often involve human safety and mission-critical operations where system failures could have catastrophic consequences. Military unmanned systems, in particular, require deterministic behavior for coordination in complex environments.
Industrial IoT applications are emerging as a new growth area for deterministic robotics systems. As factories become more connected, the coordination between robotic systems and other factory equipment requires deterministic communication and execution frameworks to maintain operational efficiency and prevent costly downtime.
Market analysis reveals that customers are increasingly willing to pay premium prices for robotic systems with proven deterministic capabilities. This trend is particularly evident in regulated industries where certification requirements mandate predictable system behavior. The market gap between conventional robotics and deterministic-capable systems continues to widen as applications become more sophisticated and safety requirements more stringent.
Manufacturing sectors, particularly automotive and electronics assembly, represent the largest market segment for deterministic robotics systems. These industries require precise coordination between multiple robots and machinery with microsecond-level timing accuracy to ensure production quality and efficiency. Market research indicates that manufacturing companies implementing deterministic robotic systems have reported productivity improvements of up to 30% compared to traditional automation solutions.
The healthcare sector presents another rapidly expanding market for deterministic robotics. Surgical robots, rehabilitation systems, and automated medication dispensing require absolute timing guarantees to ensure patient safety. The market for medical robotics with real-time capabilities is projected to grow at a compound annual growth rate of 15% through 2028, significantly outpacing the broader robotics market.
Autonomous vehicle development has created substantial demand for deterministic computing frameworks. As vehicles incorporate more advanced driver assistance systems and move toward full autonomy, the need for guaranteed response times in perception, decision-making, and control systems becomes critical. Safety certification standards like ISO 26262 explicitly require deterministic behavior for safety-critical automotive systems.
The aerospace and defense sectors represent premium market segments where deterministic performance commands significant price premiums. These applications often involve human safety and mission-critical operations where system failures could have catastrophic consequences. Military unmanned systems, in particular, require deterministic behavior for coordination in complex environments.
Industrial IoT applications are emerging as a new growth area for deterministic robotics systems. As factories become more connected, the coordination between robotic systems and other factory equipment requires deterministic communication and execution frameworks to maintain operational efficiency and prevent costly downtime.
Market analysis reveals that customers are increasingly willing to pay premium prices for robotic systems with proven deterministic capabilities. This trend is particularly evident in regulated industries where certification requirements mandate predictable system behavior. The market gap between conventional robotics and deterministic-capable systems continues to widen as applications become more sophisticated and safety requirements more stringent.
Current Challenges in ROS 2 Real-Time Implementation
Despite significant advancements in ROS 2's architecture to support real-time applications, several critical challenges persist in its real-time implementation. The current executor model in ROS 2 faces limitations in providing deterministic behavior, which is essential for time-critical robotic applications. The default single-threaded executor processes callbacks sequentially, leading to potential priority inversions where high-priority tasks may be blocked by lower-priority ones. This non-deterministic execution pattern undermines real-time guarantees required in safety-critical systems.
The multi-threaded executor, while offering improved parallelism, introduces additional complexities such as thread synchronization overhead and unpredictable thread scheduling by the operating system. These factors contribute to jitter and latency variations that compromise real-time performance. Furthermore, the current executors lack proper priority-aware scheduling mechanisms, making it difficult to ensure that critical tasks receive appropriate computational resources when needed.
Memory management presents another significant challenge. ROS 2's default memory allocation strategies rely on dynamic memory allocation, which can lead to unpredictable execution times due to potential memory fragmentation and garbage collection pauses. Real-time systems typically require deterministic memory allocation patterns to maintain consistent performance boundaries.
The rclcpp client library, while feature-rich, incorporates numerous abstractions and convenience features that introduce overhead and complexity, potentially impacting deterministic behavior. In contrast, the lightweight rclc alternative offers better deterministic properties but lacks some of the advanced features available in rclcpp, creating a functionality-determinism tradeoff that developers must navigate.
Integration with real-time operating systems (RTOS) remains problematic. While ROS 2 can run on RTOS platforms, achieving seamless integration requires careful configuration and often custom modifications. The interaction between ROS 2's communication middleware (DDS) and real-time operating system scheduling policies is particularly challenging to optimize for deterministic performance.
System-wide determinism is further complicated by the distributed nature of ROS 2 applications. Network communication introduces variable latencies that are difficult to bound tightly, and synchronizing distributed nodes with precise timing requirements remains an open challenge. The DDS middleware, while providing robust communication capabilities, was not originally designed with hard real-time constraints in mind.
Testing and validation methodologies for real-time ROS 2 systems are still evolving. There is a lack of standardized benchmarking tools and metrics specifically designed to evaluate the real-time performance of ROS 2 components, making it difficult to objectively assess and compare different implementation approaches.
The multi-threaded executor, while offering improved parallelism, introduces additional complexities such as thread synchronization overhead and unpredictable thread scheduling by the operating system. These factors contribute to jitter and latency variations that compromise real-time performance. Furthermore, the current executors lack proper priority-aware scheduling mechanisms, making it difficult to ensure that critical tasks receive appropriate computational resources when needed.
Memory management presents another significant challenge. ROS 2's default memory allocation strategies rely on dynamic memory allocation, which can lead to unpredictable execution times due to potential memory fragmentation and garbage collection pauses. Real-time systems typically require deterministic memory allocation patterns to maintain consistent performance boundaries.
The rclcpp client library, while feature-rich, incorporates numerous abstractions and convenience features that introduce overhead and complexity, potentially impacting deterministic behavior. In contrast, the lightweight rclc alternative offers better deterministic properties but lacks some of the advanced features available in rclcpp, creating a functionality-determinism tradeoff that developers must navigate.
Integration with real-time operating systems (RTOS) remains problematic. While ROS 2 can run on RTOS platforms, achieving seamless integration requires careful configuration and often custom modifications. The interaction between ROS 2's communication middleware (DDS) and real-time operating system scheduling policies is particularly challenging to optimize for deterministic performance.
System-wide determinism is further complicated by the distributed nature of ROS 2 applications. Network communication introduces variable latencies that are difficult to bound tightly, and synchronizing distributed nodes with precise timing requirements remains an open challenge. The DDS middleware, while providing robust communication capabilities, was not originally designed with hard real-time constraints in mind.
Testing and validation methodologies for real-time ROS 2 systems are still evolving. There is a lack of standardized benchmarking tools and metrics specifically designed to evaluate the real-time performance of ROS 2 components, making it difficult to objectively assess and compare different implementation approaches.
Existing Executor Models and Scheduling Approaches
01 Real-time scheduling mechanisms in ROS 2
ROS 2 implements real-time scheduling mechanisms to ensure deterministic behavior in robotic systems. These mechanisms include priority-based scheduling, time-triggered execution models, and deadline-based task management. By utilizing these scheduling approaches, ROS 2 can provide guarantees for time-critical operations, which is essential for applications requiring precise timing and predictable performance.- Real-time scheduling mechanisms in ROS 2: ROS 2 implements real-time scheduling mechanisms to ensure deterministic behavior in robotic systems. These mechanisms include priority-based scheduling, deadline-based scheduling, and reservation-based scheduling. By assigning appropriate priorities to critical tasks and using real-time operating system features, ROS 2 can guarantee predictable execution times for time-sensitive operations, which is essential for applications requiring deterministic behavior.
- Executor improvements for deterministic performance: Enhanced executor designs in ROS 2 improve deterministic scheduling by optimizing how callbacks are managed and executed. These improvements include multi-threaded executors, static executors, and callback-group-aware executors that can separate time-critical from non-critical operations. The executors can be configured to provide predictable timing behavior by controlling thread allocation and callback execution order, reducing jitter and improving overall system determinism.
- Time synchronization and clock management: Deterministic scheduling in ROS 2 relies on precise time synchronization and clock management across distributed robotic systems. This includes mechanisms for clock synchronization between nodes, handling of different time domains, and compensation for communication delays. By maintaining accurate timing information, ROS 2 can coordinate actions across multiple components with predictable timing, essential for deterministic operation in complex robotic applications.
- Quality of Service (QoS) policies for deterministic communication: ROS 2 implements configurable Quality of Service policies that enable deterministic communication between nodes. These policies control reliability, durability, deadline enforcement, and liveliness of message delivery. By properly configuring QoS settings, developers can ensure that critical messages are delivered within specific time constraints, maintaining deterministic behavior even under varying network conditions or system loads.
- Integration with real-time operating systems: ROS 2 is designed to integrate with real-time operating systems to provide deterministic scheduling guarantees. This integration leverages real-time kernel features such as preemption, priority inheritance, and resource reservation to minimize latency and jitter. By running on real-time operating systems like RT-Linux or PREEMPT_RT, ROS 2 can achieve more predictable execution timing for critical robotic tasks, essential for applications requiring strict timing guarantees.
02 Executor improvements for deterministic behavior
Enhanced executor designs in ROS 2 focus on improving deterministic behavior through better callback management and execution control. These improvements include configurable executor policies, callback grouping mechanisms, and prioritization frameworks that allow developers to specify the relative importance of different tasks. The enhanced executors help maintain predictable timing even under varying system loads.Expand Specific Solutions03 Integration with real-time operating systems
ROS 2 achieves deterministic scheduling by integrating with real-time operating systems (RTOS) and leveraging their capabilities. This integration includes utilizing RTOS scheduling policies, real-time threads, and resource management features. By building on established RTOS foundations, ROS 2 can inherit deterministic properties while providing the high-level abstractions needed for robotic application development.Expand Specific Solutions04 Communication middleware optimizations
Deterministic scheduling in ROS 2 is enhanced through optimizations in the communication middleware layer. These optimizations include quality of service (QoS) policies, predictable message delivery mechanisms, and configurable communication patterns. By controlling how data flows through the system with precise timing guarantees, ROS 2 can maintain deterministic behavior across distributed robotic components.Expand Specific Solutions05 Resource allocation and management techniques
Advanced resource allocation and management techniques are implemented in ROS 2 to support deterministic scheduling. These include CPU affinity control, memory reservation mechanisms, and resource isolation strategies. By carefully managing system resources and preventing interference between components, ROS 2 can maintain consistent execution timing and avoid unpredictable delays that would compromise deterministic behavior.Expand Specific Solutions
Key Contributors to ROS 2 Real-Time Development
The ROS 2 Real-Time ecosystem is currently in a growth phase, with market size expanding as industrial automation and autonomous systems demand deterministic computing capabilities. The technology maturity varies across key players, with established companies like NVIDIA, AMD, and Renesas Electronics leading in hardware acceleration for real-time processing. Bosch and Honeywell are advancing industrial implementations, while Thales and Krono-Safe focus on safety-critical applications. Academic institutions like Tianjin University and Northeastern University contribute significant research. The ecosystem is transitioning from experimental to production-ready solutions, with companies like ADVA Networks and Intertrust developing specialized middleware for deterministic scheduling and security frameworks.
Krono-Safe SA
Technical Solution: Krono-Safe has developed a specialized ROS 2 real-time framework built upon their ASTERIOS® real-time operating system technology. Their solution provides deterministic scheduling guarantees through a time and space partitioning approach that isolates ROS 2 components both temporally and spatially. Krono-Safe's implementation replaces the standard ROS 2 executors with a formally verified scheduling mechanism that guarantees execution timing even under worst-case scenarios. Their framework includes static analysis tools that can predict execution timing and resource utilization at design time, eliminating runtime uncertainties. Krono-Safe has integrated their solution with certification workflows for safety-critical systems, allowing ROS 2 applications to be deployed in regulated environments like automotive (ISO 26262) and industrial (IEC 61508) settings. Their approach includes specialized inter-process communication mechanisms that maintain deterministic message delivery with bounded latency, essential for closed-loop control systems requiring predictable response times.
Strengths: Formal guarantees of timing behavior; certification-ready implementation for safety-critical applications; comprehensive design-time analysis tools. Weaknesses: May impose more restrictive programming models than standard ROS 2; potentially higher learning curve; specialized tooling requirements.
Renesas Electronics Corp.
Technical Solution: Renesas has created a hardware-accelerated ROS 2 real-time solution optimized for their microcontroller and processor platforms. Their approach integrates ROS 2 with their R-Car SoCs and RX microcontrollers, providing deterministic computing capabilities through hardware-level scheduling support. Renesas' implementation includes custom extensions to the rclc executor that leverage hardware timers and interrupt controllers to achieve microsecond-level timing precision. They've developed specialized DDS implementations that minimize communication jitter through hardware offloading of packet processing and prioritization. Their solution includes a zero-copy messaging framework that reduces latency in time-critical data paths by eliminating buffer copies between ROS 2 nodes. Renesas has also created development tools that allow engineers to visualize and optimize execution timing across distributed ROS 2 systems, with particular emphasis on automotive and industrial control applications where predictable response times are essential.
Strengths: Tight hardware-software integration for optimal performance; extremely low latency for critical control loops; power-efficient implementation suitable for embedded systems. Weaknesses: Solutions are optimized primarily for Renesas hardware platforms; may require specialized knowledge of their architecture to fully utilize capabilities.
Core Innovations in rclcpp/rclc Real-Time Features
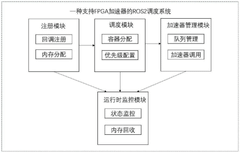
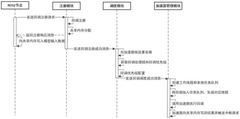
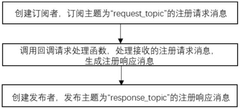
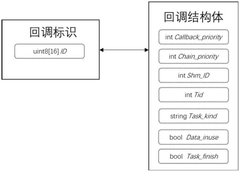
ROS2 scheduling system supporting FPGA accelerator
PatentPendingCN118838693A
Innovation
- Design the registration module, scheduling module, accelerator management module and runtime monitoring module to realize priority collaborative mapping of the callback processing chain and the accelerator execution flow, and ensure timely access to accelerator resources by the high-priority callback processing chain through a two-level priority scheduling mechanism.
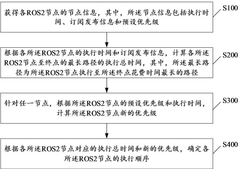
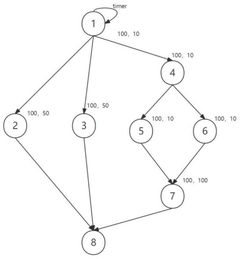
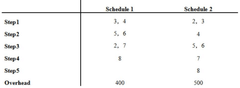
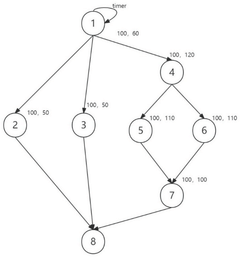
Execution scheduling method of robot operating system and related device
PatentPendingCN120066723A
Innovation
- By obtaining node information of each ROS2 node, the total execution time of the longest path from each node to the end point is calculated, and a new priority is calculated based on the preset priority and execution time, and the execution order of each node is determined to achieve efficient cross-process coordination and end-to-end real-time and determinism.
Hardware Compatibility for Real-Time ROS 2 Systems
The hardware compatibility landscape for real-time ROS 2 systems presents significant considerations for developers seeking deterministic performance. Current real-time capabilities in ROS 2 are heavily dependent on the underlying hardware architecture, with certain platforms offering superior support for time-critical operations.
x86 architectures remain the most thoroughly tested and supported platforms for real-time ROS 2 implementations. Intel and AMD processors with modern features such as high-resolution timers, advanced interrupt handling, and cache management capabilities provide the necessary foundation for predictable execution. These platforms benefit from extensive documentation and community support, making them the default choice for many industrial applications requiring real-time performance.
ARM-based systems have gained significant traction in real-time ROS 2 deployments, particularly in embedded and mobile robotics. The Raspberry Pi 4, NVIDIA Jetson series, and various industrial ARM SoCs offer compelling combinations of power efficiency and computational capability. However, achieving consistent real-time performance on these platforms often requires careful system configuration, including kernel patching and peripheral management to minimize latency sources.
FPGA and heterogeneous computing platforms represent an emerging frontier for real-time ROS 2 implementations. These architectures allow for hardware acceleration of time-critical components, potentially offloading deterministic tasks from the general-purpose processor. The Xilinx Zynq UltraScale+ and Intel Cyclone platforms have demonstrated promising results when paired with real-time ROS 2 executors, though integration complexity remains higher than with traditional architectures.
Hardware compatibility extends beyond processor architecture to encompass peripheral interfaces and communication buses. Real-time ROS 2 systems typically require deterministic I/O capabilities, with EtherCAT, CAN, and real-time Ethernet protocols being preferred options. The compatibility of these interfaces with ROS 2's communication infrastructure varies significantly, with some requiring custom drivers or middleware adaptations to maintain deterministic guarantees.
Memory subsystem characteristics also impact real-time performance substantially. Systems with predictable memory access patterns, controllable cache behavior, and support for memory pinning tend to exhibit more consistent execution timing. This becomes particularly important when implementing deterministic executors in rclcpp/rclc, as memory allocation patterns can introduce significant jitter if not properly managed.
The selection of operating system and kernel configuration remains tightly coupled with hardware compatibility considerations. While the Linux kernel with PREEMPT_RT patches provides a standardized approach to real-time computing across diverse hardware platforms, achieving optimal performance requires hardware-specific tuning and configuration.
x86 architectures remain the most thoroughly tested and supported platforms for real-time ROS 2 implementations. Intel and AMD processors with modern features such as high-resolution timers, advanced interrupt handling, and cache management capabilities provide the necessary foundation for predictable execution. These platforms benefit from extensive documentation and community support, making them the default choice for many industrial applications requiring real-time performance.
ARM-based systems have gained significant traction in real-time ROS 2 deployments, particularly in embedded and mobile robotics. The Raspberry Pi 4, NVIDIA Jetson series, and various industrial ARM SoCs offer compelling combinations of power efficiency and computational capability. However, achieving consistent real-time performance on these platforms often requires careful system configuration, including kernel patching and peripheral management to minimize latency sources.
FPGA and heterogeneous computing platforms represent an emerging frontier for real-time ROS 2 implementations. These architectures allow for hardware acceleration of time-critical components, potentially offloading deterministic tasks from the general-purpose processor. The Xilinx Zynq UltraScale+ and Intel Cyclone platforms have demonstrated promising results when paired with real-time ROS 2 executors, though integration complexity remains higher than with traditional architectures.
Hardware compatibility extends beyond processor architecture to encompass peripheral interfaces and communication buses. Real-time ROS 2 systems typically require deterministic I/O capabilities, with EtherCAT, CAN, and real-time Ethernet protocols being preferred options. The compatibility of these interfaces with ROS 2's communication infrastructure varies significantly, with some requiring custom drivers or middleware adaptations to maintain deterministic guarantees.
Memory subsystem characteristics also impact real-time performance substantially. Systems with predictable memory access patterns, controllable cache behavior, and support for memory pinning tend to exhibit more consistent execution timing. This becomes particularly important when implementing deterministic executors in rclcpp/rclc, as memory allocation patterns can introduce significant jitter if not properly managed.
The selection of operating system and kernel configuration remains tightly coupled with hardware compatibility considerations. While the Linux kernel with PREEMPT_RT patches provides a standardized approach to real-time computing across diverse hardware platforms, achieving optimal performance requires hardware-specific tuning and configuration.
Performance Benchmarking Methodologies
Performance benchmarking for ROS 2 real-time systems requires rigorous methodologies to evaluate execution determinism, latency characteristics, and scheduling efficiency. These methodologies must account for the unique challenges posed by distributed robotic systems operating under timing constraints.
Standard benchmarking approaches typically measure end-to-end latency, jitter, CPU utilization, and memory consumption. However, when evaluating ROS 2's real-time capabilities, these metrics must be contextualized within the executor model and callback handling mechanisms that define the framework's architecture.
Micro-benchmarking techniques focus on isolated components, measuring the performance of individual executors (SingleThreadedExecutor, MultiThreadedExecutor, StaticSingleThreadedExecutor) under controlled conditions. These tests typically involve recording callback execution times across thousands of iterations to establish statistical significance and identify outliers that represent non-deterministic behavior.
System-level benchmarking expands the scope to evaluate complete application scenarios, measuring how deterministic scheduling performs under varying loads. This includes publisher-subscriber chains with different Quality of Service (QoS) settings and priority levels to simulate real-world robotic applications.
Hardware-in-the-loop testing represents the most comprehensive methodology, incorporating actual sensors and actuators to validate real-time performance in physical environments. This approach reveals how theoretical guarantees translate to practical applications where environmental factors introduce additional variability.
Standardized workloads have emerged within the ROS 2 community to facilitate comparative analysis. These include the "pendulum demo" which simulates a control system with strict timing requirements, and the "real-time publisher" benchmark that measures publication consistency under system stress.
Visualization tools like Tracetools and LTTng provide critical insights by generating execution traces that can be analyzed to identify scheduling anomalies and priority inversions. These tools enable researchers to visualize callback execution patterns and identify sources of non-determinism that might otherwise remain hidden in aggregate statistics.
Cross-platform comparison methodologies are particularly important given ROS 2's support for multiple operating systems. Benchmarks must account for differences in real-time capabilities between Linux with PREEMPT_RT patches, vanilla Linux kernels, and other platforms, establishing normalized metrics that facilitate meaningful comparison across diverse deployment environments.
Standard benchmarking approaches typically measure end-to-end latency, jitter, CPU utilization, and memory consumption. However, when evaluating ROS 2's real-time capabilities, these metrics must be contextualized within the executor model and callback handling mechanisms that define the framework's architecture.
Micro-benchmarking techniques focus on isolated components, measuring the performance of individual executors (SingleThreadedExecutor, MultiThreadedExecutor, StaticSingleThreadedExecutor) under controlled conditions. These tests typically involve recording callback execution times across thousands of iterations to establish statistical significance and identify outliers that represent non-deterministic behavior.
System-level benchmarking expands the scope to evaluate complete application scenarios, measuring how deterministic scheduling performs under varying loads. This includes publisher-subscriber chains with different Quality of Service (QoS) settings and priority levels to simulate real-world robotic applications.
Hardware-in-the-loop testing represents the most comprehensive methodology, incorporating actual sensors and actuators to validate real-time performance in physical environments. This approach reveals how theoretical guarantees translate to practical applications where environmental factors introduce additional variability.
Standardized workloads have emerged within the ROS 2 community to facilitate comparative analysis. These include the "pendulum demo" which simulates a control system with strict timing requirements, and the "real-time publisher" benchmark that measures publication consistency under system stress.
Visualization tools like Tracetools and LTTng provide critical insights by generating execution traces that can be analyzed to identify scheduling anomalies and priority inversions. These tools enable researchers to visualize callback execution patterns and identify sources of non-determinism that might otherwise remain hidden in aggregate statistics.
Cross-platform comparison methodologies are particularly important given ROS 2's support for multiple operating systems. Benchmarks must account for differences in real-time capabilities between Linux with PREEMPT_RT patches, vanilla Linux kernels, and other platforms, establishing normalized metrics that facilitate meaningful comparison across diverse deployment environments.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!