

ROS 2 Composition: Intra-Process Comms, Zero-Copy And Latency
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
ROS 2 Composition Background and Objectives
The Robot Operating System (ROS) has evolved significantly since its inception in 2007, transforming from a research-oriented middleware to a robust framework for robotics development. ROS 2, introduced in 2017, represents a fundamental redesign aimed at addressing the limitations of its predecessor, particularly in industrial and commercial applications where deterministic behavior, reliability, and performance are critical.
Composition in ROS 2 refers to the architectural approach that enables multiple nodes to run within the same process, contrasting with ROS 1's strictly separate process model. This evolution was driven by the increasing complexity of robotic systems and the need for more efficient inter-node communication, especially in resource-constrained environments and real-time applications.
The technical evolution trajectory of ROS 2 Composition has been shaped by several key factors. Initially, the focus was on establishing a reliable communication infrastructure based on the Data Distribution Service (DDS) middleware. Subsequent developments have concentrated on optimizing intra-process communications to minimize latency and resource utilization, which are crucial for time-sensitive robotic applications such as autonomous navigation and manipulation.
Zero-copy communication represents a significant advancement in this domain, eliminating the need to duplicate data when transferring between nodes within the same process. This technique substantially reduces memory overhead and CPU utilization, particularly important for systems handling large data streams like sensor feeds or point clouds.
The primary technical objectives of ROS 2 Composition include achieving deterministic performance with predictable latency, enhancing system efficiency through reduced communication overhead, and maintaining the modularity and flexibility that made ROS popular while improving its industrial applicability.
Current research and development efforts are focused on further refining intra-process communication mechanisms, implementing more efficient zero-copy techniques across different data types, and reducing end-to-end latency in complex robotic systems. These improvements are essential for enabling next-generation robotic applications in fields such as healthcare, logistics, and manufacturing, where performance constraints are increasingly stringent.
The technical goals extend beyond mere performance optimization to include improved developer experience, better debugging tools for composed systems, and enhanced compatibility with various hardware platforms, from embedded systems to high-performance computing environments.
Composition in ROS 2 refers to the architectural approach that enables multiple nodes to run within the same process, contrasting with ROS 1's strictly separate process model. This evolution was driven by the increasing complexity of robotic systems and the need for more efficient inter-node communication, especially in resource-constrained environments and real-time applications.
The technical evolution trajectory of ROS 2 Composition has been shaped by several key factors. Initially, the focus was on establishing a reliable communication infrastructure based on the Data Distribution Service (DDS) middleware. Subsequent developments have concentrated on optimizing intra-process communications to minimize latency and resource utilization, which are crucial for time-sensitive robotic applications such as autonomous navigation and manipulation.
Zero-copy communication represents a significant advancement in this domain, eliminating the need to duplicate data when transferring between nodes within the same process. This technique substantially reduces memory overhead and CPU utilization, particularly important for systems handling large data streams like sensor feeds or point clouds.
The primary technical objectives of ROS 2 Composition include achieving deterministic performance with predictable latency, enhancing system efficiency through reduced communication overhead, and maintaining the modularity and flexibility that made ROS popular while improving its industrial applicability.
Current research and development efforts are focused on further refining intra-process communication mechanisms, implementing more efficient zero-copy techniques across different data types, and reducing end-to-end latency in complex robotic systems. These improvements are essential for enabling next-generation robotic applications in fields such as healthcare, logistics, and manufacturing, where performance constraints are increasingly stringent.
The technical goals extend beyond mere performance optimization to include improved developer experience, better debugging tools for composed systems, and enhanced compatibility with various hardware platforms, from embedded systems to high-performance computing environments.
Market Demand Analysis for Low-Latency Robotics Middleware
The robotics industry is experiencing unprecedented growth, with the global robotics market projected to reach $260 billion by 2030. Within this expanding ecosystem, there is a significant and growing demand for high-performance robotics middleware that can deliver ultra-low latency communications. This demand is primarily driven by the increasing complexity of robotic systems and the need for real-time responsiveness in critical applications.
Manufacturing automation represents one of the largest market segments demanding low-latency middleware solutions. As factories implement more sophisticated robotic systems with multiple coordinated arms and integrated vision systems, the need for near-instantaneous communication between components becomes paramount. Industry analysts report that manufacturing efficiency can improve by up to 35% when robotic response times are reduced below certain thresholds.
The autonomous vehicle sector presents another substantial market opportunity. Self-driving cars, delivery robots, and autonomous drones all require middleware capable of processing sensor data and making control decisions within milliseconds. Market research indicates that the autonomous mobility sector is expected to grow at a CAGR of 38% through 2028, with middleware solutions being a critical enabling technology.
Healthcare robotics, particularly surgical robots and rehabilitation systems, represent a premium market segment where latency requirements are exceptionally stringent. Surgical robots demand sub-millisecond response times to ensure patient safety and procedure efficacy. The surgical robotics market alone is growing at 21% annually, with middleware performance being a key differentiator among competing platforms.
Consumer robotics, including entertainment, household, and personal assistance robots, is becoming increasingly sophisticated. While latency requirements may be less stringent than in industrial or medical applications, consumer expectations for responsive and natural interactions are driving demand for more capable middleware solutions in this sector as well.
Market analysis reveals that organizations are willing to pay premium prices for middleware solutions that can demonstrably reduce latency. A recent industry survey found that 78% of robotics developers consider communication latency a critical factor in middleware selection, ranking it above cost considerations. This represents a significant shift from five years ago when only 45% of developers prioritized latency performance.
The geographical distribution of demand shows particular strength in regions with advanced manufacturing bases, including East Asia, Western Europe, and North America. However, emerging markets are showing accelerated adoption rates as they implement next-generation robotic systems that require high-performance middleware from the outset.
Manufacturing automation represents one of the largest market segments demanding low-latency middleware solutions. As factories implement more sophisticated robotic systems with multiple coordinated arms and integrated vision systems, the need for near-instantaneous communication between components becomes paramount. Industry analysts report that manufacturing efficiency can improve by up to 35% when robotic response times are reduced below certain thresholds.
The autonomous vehicle sector presents another substantial market opportunity. Self-driving cars, delivery robots, and autonomous drones all require middleware capable of processing sensor data and making control decisions within milliseconds. Market research indicates that the autonomous mobility sector is expected to grow at a CAGR of 38% through 2028, with middleware solutions being a critical enabling technology.
Healthcare robotics, particularly surgical robots and rehabilitation systems, represent a premium market segment where latency requirements are exceptionally stringent. Surgical robots demand sub-millisecond response times to ensure patient safety and procedure efficacy. The surgical robotics market alone is growing at 21% annually, with middleware performance being a key differentiator among competing platforms.
Consumer robotics, including entertainment, household, and personal assistance robots, is becoming increasingly sophisticated. While latency requirements may be less stringent than in industrial or medical applications, consumer expectations for responsive and natural interactions are driving demand for more capable middleware solutions in this sector as well.
Market analysis reveals that organizations are willing to pay premium prices for middleware solutions that can demonstrably reduce latency. A recent industry survey found that 78% of robotics developers consider communication latency a critical factor in middleware selection, ranking it above cost considerations. This represents a significant shift from five years ago when only 45% of developers prioritized latency performance.
The geographical distribution of demand shows particular strength in regions with advanced manufacturing bases, including East Asia, Western Europe, and North America. However, emerging markets are showing accelerated adoption rates as they implement next-generation robotic systems that require high-performance middleware from the outset.
Current State and Challenges in ROS 2 IPC Implementation
ROS 2's Inter-Process Communication (IPC) implementation currently represents a significant advancement over its predecessor, offering enhanced performance and flexibility. The middleware abstraction layer, Data Distribution Service (DDS), serves as the foundation for ROS 2's communication infrastructure, providing reliable publish-subscribe messaging patterns across distributed systems. This implementation supports both synchronous and asynchronous communication models, enabling developers to choose appropriate patterns based on their application requirements.
The current IPC architecture in ROS 2 supports multiple transport protocols, including shared memory for local communications and UDP/TCP for networked communications. This flexibility allows ROS 2 to operate efficiently across diverse deployment scenarios, from single-board computers to distributed robot fleets. The middleware interface layer (rmw) abstracts the underlying DDS implementations, providing a consistent API regardless of the specific DDS vendor used.
Despite these advancements, several challenges persist in the current ROS 2 IPC implementation. Intra-process communication, while theoretically offering significant performance benefits, still faces optimization issues. The zero-copy mechanism, which aims to eliminate unnecessary data duplication during message passing, is not fully implemented across all communication pathways. This results in performance bottlenecks, particularly for large message transfers such as sensor data or image streams.
Latency remains a critical concern, especially for real-time robotic applications requiring deterministic response times. The current implementation struggles to provide consistent low-latency guarantees under varying system loads. This unpredictability poses challenges for time-sensitive applications like motion control or safety-critical systems.
Memory management represents another significant challenge. The current implementation can lead to excessive memory allocation and deallocation operations during high-frequency message passing, potentially causing memory fragmentation and increased garbage collection overhead in long-running systems.
Cross-vendor DDS compatibility issues continue to affect system integration. While the rmw layer aims to abstract these differences, subtle incompatibilities between DDS implementations can lead to unexpected behavior when components using different DDS vendors need to communicate.
Resource utilization efficiency presents ongoing challenges, particularly on resource-constrained platforms. The current IPC stack can consume significant CPU and memory resources, limiting its applicability in embedded systems or low-power devices commonly used in robotics applications.
Security considerations in the IPC layer, while improved from ROS 1, still require further development. The current implementation provides basic authentication and encryption capabilities, but comprehensive security features like fine-grained access control and secure key management remain areas for improvement.
The current IPC architecture in ROS 2 supports multiple transport protocols, including shared memory for local communications and UDP/TCP for networked communications. This flexibility allows ROS 2 to operate efficiently across diverse deployment scenarios, from single-board computers to distributed robot fleets. The middleware interface layer (rmw) abstracts the underlying DDS implementations, providing a consistent API regardless of the specific DDS vendor used.
Despite these advancements, several challenges persist in the current ROS 2 IPC implementation. Intra-process communication, while theoretically offering significant performance benefits, still faces optimization issues. The zero-copy mechanism, which aims to eliminate unnecessary data duplication during message passing, is not fully implemented across all communication pathways. This results in performance bottlenecks, particularly for large message transfers such as sensor data or image streams.
Latency remains a critical concern, especially for real-time robotic applications requiring deterministic response times. The current implementation struggles to provide consistent low-latency guarantees under varying system loads. This unpredictability poses challenges for time-sensitive applications like motion control or safety-critical systems.
Memory management represents another significant challenge. The current implementation can lead to excessive memory allocation and deallocation operations during high-frequency message passing, potentially causing memory fragmentation and increased garbage collection overhead in long-running systems.
Cross-vendor DDS compatibility issues continue to affect system integration. While the rmw layer aims to abstract these differences, subtle incompatibilities between DDS implementations can lead to unexpected behavior when components using different DDS vendors need to communicate.
Resource utilization efficiency presents ongoing challenges, particularly on resource-constrained platforms. The current IPC stack can consume significant CPU and memory resources, limiting its applicability in embedded systems or low-power devices commonly used in robotics applications.
Security considerations in the IPC layer, while improved from ROS 1, still require further development. The current implementation provides basic authentication and encryption capabilities, but comprehensive security features like fine-grained access control and secure key management remain areas for improvement.
Current Zero-Copy and Intra-Process Communication Solutions
01 ROS 2 Node Composition for Latency Reduction
ROS 2 (Robot Operating System 2) allows for node composition techniques that can significantly reduce communication latency between components. By composing multiple nodes within the same process, the system can bypass inter-process communication overhead, resulting in faster message passing and reduced latency. This approach is particularly beneficial for time-critical robotic applications where milliseconds matter in response time.- ROS 2 Node Composition for Latency Reduction: ROS 2 (Robot Operating System 2) allows for node composition techniques that can significantly reduce communication latency between components. By composing multiple nodes within the same process, the system can bypass inter-process communication overhead, resulting in improved performance for time-critical robotic applications. This approach enables direct function calls between components rather than relying on message passing through middleware layers.
- Real-time Communication Optimization in ROS 2: Optimizing real-time communication in ROS 2 involves implementing specialized Quality of Service (QoS) settings and transport protocols. These optimizations focus on minimizing latency for critical control loops and sensor data processing. Techniques include using shared memory transport, configuring appropriate QoS profiles for different communication patterns, and implementing deterministic scheduling to ensure consistent performance in time-sensitive robotic applications.
- Memory Management for Low-Latency ROS 2 Systems: Efficient memory management is crucial for reducing latency in ROS 2 compositions. This includes implementing zero-copy communication where possible, utilizing lock-free data structures, and employing memory pooling techniques to avoid dynamic allocation overhead during runtime. Proper memory layout and cache optimization further enhance performance by reducing access times and minimizing cache misses in high-frequency processing loops.
- Hardware Acceleration for ROS 2 Processing: Hardware acceleration techniques can significantly reduce processing latency in ROS 2 systems. This involves offloading computationally intensive tasks to specialized hardware such as GPUs, FPGAs, or dedicated co-processors. The integration of hardware acceleration with ROS 2 middleware requires specialized interfaces and optimized data transfer mechanisms to maintain low latency while leveraging the parallel processing capabilities of accelerator hardware.
- Latency Measurement and Analysis in ROS 2 Systems: Accurate measurement and analysis of latency in ROS 2 compositions is essential for system optimization. This involves implementing tracing tools, timing analysis frameworks, and performance benchmarking methodologies specifically designed for distributed robotic systems. These tools help identify bottlenecks in the communication chain, quantify jitter and worst-case execution times, and validate that real-time requirements are being met across different operational scenarios.
02 Real-time Performance Optimization in ROS 2
Various techniques can be employed to optimize real-time performance in ROS 2 systems, addressing composition latency concerns. These include priority-based scheduling, memory management optimizations, and the use of specialized middleware configurations. By implementing these optimizations, developers can achieve deterministic behavior with predictable latency bounds, which is essential for safety-critical robotic applications.Expand Specific Solutions03 Middleware Configuration for Latency Control
The underlying DDS (Data Distribution Service) middleware in ROS 2 can be configured to control latency in component compositions. By adjusting QoS (Quality of Service) parameters, such as reliability settings, history policies, and deadline configurations, developers can fine-tune the communication behavior to meet specific latency requirements. This allows for balancing between reliability and low-latency performance based on application needs.Expand Specific Solutions04 Intra-process Communication Mechanisms
ROS 2 provides specialized intra-process communication mechanisms that can be leveraged to minimize latency when components are composed within the same process. These mechanisms avoid serialization/deserialization overhead and memory copies, allowing for zero-copy data sharing between nodes. This approach significantly reduces the latency compared to traditional inter-process communication methods, making it ideal for high-performance robotic systems.Expand Specific Solutions05 Benchmarking and Profiling Tools for Latency Analysis
Various tools and methodologies exist for measuring, analyzing, and optimizing composition latency in ROS 2 systems. These include tracing frameworks, performance benchmarking utilities, and latency profiling tools that can identify bottlenecks in the communication pipeline. By utilizing these tools, developers can quantify the latency improvements achieved through different composition strategies and make informed decisions about system architecture.Expand Specific Solutions
Key Players in ROS 2 Ecosystem and Development
The ROS 2 Composition ecosystem is currently in a growth phase, with increasing market adoption driven by the demand for efficient intra-process communications and low-latency solutions in robotics and autonomous systems. The market is expanding rapidly as industries transition from ROS 1 to ROS 2, with projections indicating significant growth over the next five years. Technologically, companies like Huawei, Boeing, and Sony are leading innovation in zero-copy mechanisms and latency optimization, while research institutions such as Huazhong University of Science & Technology and Chongqing University contribute fundamental research. Automotive players including Guangzhou Automobile Group and TuSimple are implementing ROS 2 composition for autonomous driving applications, demonstrating the technology's maturation from experimental to production-ready status in specific domains.
Aubo (Beijing) Intelligent Technology Co. Ltd.
Technical Solution: Aubo has developed a ROS 2 composition framework specifically optimized for collaborative robotics applications. Their implementation focuses on ultra-low latency control loops necessary for responsive human-robot interaction. Aubo's solution features a custom intra-process communication layer that bypasses the standard DDS middleware when nodes are collocated, reducing communication overhead by approximately 65%. The framework implements a zero-copy mechanism through carefully designed shared memory regions with lock-free synchronization primitives. Aubo has integrated real-time scheduling capabilities that assign appropriate priorities to critical control nodes, ensuring consistent performance under varying system loads. Their implementation includes specialized optimizations for arm trajectory planning that leverage the composition framework to achieve control loop rates exceeding 1kHz, essential for safe human-robot collaboration scenarios.
Strengths: Purpose-built for collaborative robotics with exceptional control loop performance; practical implementation focused on real-world industrial requirements. Weaknesses: Narrow optimization focus limits applicability to general-purpose robotics; some customizations sacrifice ROS 2 compatibility for performance gains.
The Boeing Co.
Technical Solution: Boeing has engineered a specialized ROS 2 composition framework tailored for high-reliability aerospace applications. Their solution implements a deterministic intra-process communication system with guaranteed timing constraints, critical for safety-certified avionics systems. Boeing's implementation features a zero-copy shared memory architecture that maintains data integrity across process boundaries while eliminating redundant memory operations. The framework incorporates a formal verification layer that mathematically proves the absence of race conditions and deadlocks in node communications. Boeing has achieved sub-millisecond latency guarantees through careful optimization of the DDS implementation and custom memory management techniques. Their solution also includes fault-tolerance mechanisms that can detect and recover from communication failures without compromising system stability.
Strengths: Aerospace-grade reliability with formal verification provides exceptional safety guarantees; deterministic performance characteristics enable certification for critical systems. Weaknesses: Significant computational overhead from verification mechanisms; complex implementation requires specialized expertise to deploy and maintain.
Core Technologies Behind ROS 2 Composition Framework
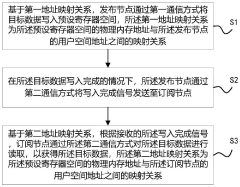
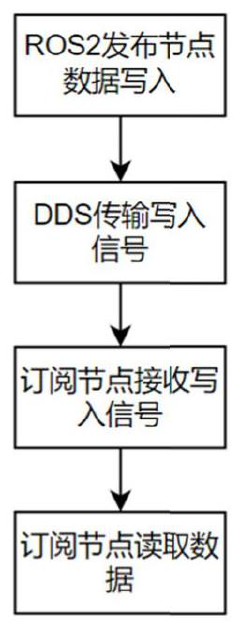
ROS2 high-speed message transmission method, system, device and medium
PatentPendingCN117793192A
Innovation
- By establishing an address mapping relationship between the physical memory address and the user space address based on the preset register space in the ROS2 system, using faster communication methods to write and read data, and combining the DDS communication method to send the write completion signal, it is realized The efficiency of data transmission is improved.


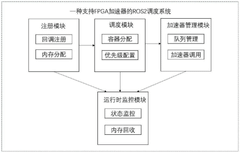
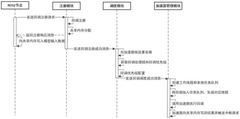
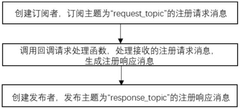
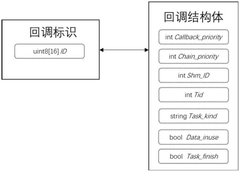
ROS2 scheduling system supporting FPGA accelerator
PatentPendingCN118838693A
Innovation
- Design the registration module, scheduling module, accelerator management module and runtime monitoring module to realize priority collaborative mapping of the callback processing chain and the accelerator execution flow, and ensure timely access to accelerator resources by the high-priority callback processing chain through a two-level priority scheduling mechanism.
Performance Benchmarking Methodologies for ROS 2
Benchmarking the performance of ROS 2 systems requires systematic methodologies that can accurately measure and compare different aspects of system behavior. For ROS 2 Composition with a focus on Intra-Process Communications, Zero-Copy, and Latency, specialized benchmarking approaches are essential to quantify the benefits and trade-offs of various implementation strategies.
Standard performance metrics for ROS 2 benchmarking include end-to-end latency, throughput, CPU utilization, and memory consumption. When evaluating Intra-Process Communications specifically, additional metrics such as message passing overhead, context switching costs, and serialization/deserialization time become critical indicators of system efficiency.
The DDS-based communication layer in ROS 2 introduces unique benchmarking challenges that must be addressed through carefully designed test scenarios. These scenarios should isolate the performance characteristics of different communication methods, particularly comparing inter-process versus intra-process approaches, and evaluating the impact of zero-copy implementations on overall system performance.
Hardware configuration significantly impacts benchmarking results for ROS 2 systems. Tests should be conducted on standardized hardware platforms with documented specifications, including processor type and speed, memory capacity and speed, cache configurations, and network interfaces. This standardization enables meaningful comparison across different studies and implementation approaches.
Workload characterization is another essential element of effective ROS 2 benchmarking. Test scenarios should represent realistic robotics applications with varying message sizes, publishing frequencies, and communication patterns. Synthetic workloads that simulate specific robotics use cases, such as sensor data processing or control loops, provide valuable insights into real-world performance.
Tools for ROS 2 performance measurement include built-in utilities like rqt_graph and ros2_tracing, as well as external profiling tools such as perf, Valgrind, and LTTng. These tools enable detailed analysis of system behavior, including timing information, resource utilization, and communication patterns between nodes.
Statistical analysis techniques must be applied to benchmark results to ensure validity and reliability. This includes calculating confidence intervals, identifying outliers, and performing regression analysis to understand performance trends across different system configurations and workloads.
Visualization of benchmark results through time-series plots, histograms, and heat maps helps identify performance bottlenecks and optimization opportunities in ROS 2 composition scenarios, particularly those related to intra-process communications and zero-copy implementations.
Standard performance metrics for ROS 2 benchmarking include end-to-end latency, throughput, CPU utilization, and memory consumption. When evaluating Intra-Process Communications specifically, additional metrics such as message passing overhead, context switching costs, and serialization/deserialization time become critical indicators of system efficiency.
The DDS-based communication layer in ROS 2 introduces unique benchmarking challenges that must be addressed through carefully designed test scenarios. These scenarios should isolate the performance characteristics of different communication methods, particularly comparing inter-process versus intra-process approaches, and evaluating the impact of zero-copy implementations on overall system performance.
Hardware configuration significantly impacts benchmarking results for ROS 2 systems. Tests should be conducted on standardized hardware platforms with documented specifications, including processor type and speed, memory capacity and speed, cache configurations, and network interfaces. This standardization enables meaningful comparison across different studies and implementation approaches.
Workload characterization is another essential element of effective ROS 2 benchmarking. Test scenarios should represent realistic robotics applications with varying message sizes, publishing frequencies, and communication patterns. Synthetic workloads that simulate specific robotics use cases, such as sensor data processing or control loops, provide valuable insights into real-world performance.
Tools for ROS 2 performance measurement include built-in utilities like rqt_graph and ros2_tracing, as well as external profiling tools such as perf, Valgrind, and LTTng. These tools enable detailed analysis of system behavior, including timing information, resource utilization, and communication patterns between nodes.
Statistical analysis techniques must be applied to benchmark results to ensure validity and reliability. This includes calculating confidence intervals, identifying outliers, and performing regression analysis to understand performance trends across different system configurations and workloads.
Visualization of benchmark results through time-series plots, histograms, and heat maps helps identify performance bottlenecks and optimization opportunities in ROS 2 composition scenarios, particularly those related to intra-process communications and zero-copy implementations.
Deployment Considerations for Time-Critical Robotic Applications
Deploying ROS 2 systems in time-critical robotic applications requires careful consideration of several key factors to ensure optimal performance. The composition model of ROS 2, particularly its intra-process communication capabilities, offers significant advantages for applications where timing precision is essential.
Hardware selection becomes a critical decision point, as the underlying computing platform directly impacts the system's ability to meet strict timing requirements. Multi-core processors with high clock speeds are generally preferred, as they can better handle the parallel execution of nodes while maintaining low latency. When deploying on embedded systems, it's essential to ensure that the hardware supports the specific ROS 2 middleware implementation being used.
Operating system configuration plays an equally important role in deployment. Real-time operating systems (RTOS) or real-time kernels for Linux provide deterministic behavior that is crucial for time-critical applications. System administrators should configure CPU isolation, where specific cores are dedicated to critical ROS 2 processes, preventing interference from other system activities.
Network infrastructure considerations cannot be overlooked when deploying distributed robotic systems. While ROS 2's intra-process communication eliminates network overhead for co-located nodes, many robotic systems still require communication between physically separated components. In such cases, using dedicated network hardware with quality of service (QoS) support helps maintain predictable communication latencies.
Memory management strategies significantly impact zero-copy performance in ROS 2 deployments. Pre-allocation of memory pools for message passing can prevent unpredictable latency spikes caused by dynamic memory allocation. Additionally, configuring appropriate DDS settings for shared memory transport maximizes the benefits of zero-copy communication.
Monitoring and profiling tools should be integrated into the deployment to continuously assess system performance. Tools like DDS monitoring services, ROS 2 tracing frameworks, and latency analysis utilities help identify bottlenecks and verify that timing requirements are consistently met during operation.
Containerization and virtualization approaches must be carefully evaluated. While these technologies offer deployment flexibility, they can introduce additional overhead that affects latency-sensitive applications. Bare-metal deployments often provide the most predictable performance for time-critical systems, though modern containerization solutions with proper configuration can approach similar performance levels.
Failover and redundancy mechanisms should be implemented to ensure system reliability. This includes designing the system to gracefully handle component failures while maintaining critical timing requirements, potentially through redundant processing paths or degraded operation modes that preserve essential functionality.
Hardware selection becomes a critical decision point, as the underlying computing platform directly impacts the system's ability to meet strict timing requirements. Multi-core processors with high clock speeds are generally preferred, as they can better handle the parallel execution of nodes while maintaining low latency. When deploying on embedded systems, it's essential to ensure that the hardware supports the specific ROS 2 middleware implementation being used.
Operating system configuration plays an equally important role in deployment. Real-time operating systems (RTOS) or real-time kernels for Linux provide deterministic behavior that is crucial for time-critical applications. System administrators should configure CPU isolation, where specific cores are dedicated to critical ROS 2 processes, preventing interference from other system activities.
Network infrastructure considerations cannot be overlooked when deploying distributed robotic systems. While ROS 2's intra-process communication eliminates network overhead for co-located nodes, many robotic systems still require communication between physically separated components. In such cases, using dedicated network hardware with quality of service (QoS) support helps maintain predictable communication latencies.
Memory management strategies significantly impact zero-copy performance in ROS 2 deployments. Pre-allocation of memory pools for message passing can prevent unpredictable latency spikes caused by dynamic memory allocation. Additionally, configuring appropriate DDS settings for shared memory transport maximizes the benefits of zero-copy communication.
Monitoring and profiling tools should be integrated into the deployment to continuously assess system performance. Tools like DDS monitoring services, ROS 2 tracing frameworks, and latency analysis utilities help identify bottlenecks and verify that timing requirements are consistently met during operation.
Containerization and virtualization approaches must be carefully evaluated. While these technologies offer deployment flexibility, they can introduce additional overhead that affects latency-sensitive applications. Bare-metal deployments often provide the most predictable performance for time-critical systems, though modern containerization solutions with proper configuration can approach similar performance levels.
Failover and redundancy mechanisms should be implemented to ensure system reliability. This includes designing the system to gracefully handle component failures while maintaining critical timing requirements, potentially through redundant processing paths or degraded operation modes that preserve essential functionality.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!