ROS 2 Logging/Tracing: LTTng, Perfetto And Bottleneck Attribution
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
ROS 2 Logging Evolution and Objectives
The evolution of ROS 2 logging and tracing capabilities represents a significant advancement in robotics software development, transitioning from the relatively simple logging mechanisms in ROS 1 to a more sophisticated, configurable, and performance-oriented approach. Initially, ROS 1 utilized the rosconsole framework, which provided basic logging functionality but lacked advanced features for real-time systems and complex robotic applications.
With the architectural redesign in ROS 2, logging mechanisms were fundamentally reimagined to address the limitations of the original framework. The introduction of Data Distribution Service (DDS) as the middleware layer necessitated a more robust logging system that could handle distributed systems efficiently. This evolution was driven by the growing complexity of robotic applications and the need for better debugging and performance analysis tools in production environments.
The primary objectives of ROS 2 logging and tracing systems include enhancing system observability, facilitating efficient debugging, and enabling performance optimization. These objectives align with the broader goals of ROS 2 to support real-time systems, safety-critical applications, and production-grade robotics software.
LTTng (Linux Trace Toolkit Next Generation) integration marked a significant milestone in this evolution, providing kernel-level tracing capabilities with minimal overhead. This allowed developers to capture detailed system events without significantly impacting performance, which is crucial for real-time robotic applications.
More recently, the integration of Perfetto, Google's performance instrumentation and tracing platform, has further expanded ROS 2's capabilities. Perfetto offers advanced visualization tools and analysis features that complement LTTng's low-level tracing, providing a more comprehensive solution for performance monitoring and bottleneck identification.
The bottleneck attribution capabilities represent the latest advancement in this evolutionary path. These tools aim to automatically identify performance bottlenecks in ROS 2 applications by correlating trace data across different system layers, from application code to middleware and kernel. This holistic approach to performance analysis is essential for optimizing complex robotic systems where bottlenecks may span multiple components.
Looking forward, the ROS 2 logging and tracing ecosystem continues to evolve toward more integrated, automated, and accessible tools. The community is working on standardizing tracing instrumentation across core packages, improving visualization tools, and developing more sophisticated analysis algorithms for automated performance optimization recommendations.
With the architectural redesign in ROS 2, logging mechanisms were fundamentally reimagined to address the limitations of the original framework. The introduction of Data Distribution Service (DDS) as the middleware layer necessitated a more robust logging system that could handle distributed systems efficiently. This evolution was driven by the growing complexity of robotic applications and the need for better debugging and performance analysis tools in production environments.
The primary objectives of ROS 2 logging and tracing systems include enhancing system observability, facilitating efficient debugging, and enabling performance optimization. These objectives align with the broader goals of ROS 2 to support real-time systems, safety-critical applications, and production-grade robotics software.
LTTng (Linux Trace Toolkit Next Generation) integration marked a significant milestone in this evolution, providing kernel-level tracing capabilities with minimal overhead. This allowed developers to capture detailed system events without significantly impacting performance, which is crucial for real-time robotic applications.
More recently, the integration of Perfetto, Google's performance instrumentation and tracing platform, has further expanded ROS 2's capabilities. Perfetto offers advanced visualization tools and analysis features that complement LTTng's low-level tracing, providing a more comprehensive solution for performance monitoring and bottleneck identification.
The bottleneck attribution capabilities represent the latest advancement in this evolutionary path. These tools aim to automatically identify performance bottlenecks in ROS 2 applications by correlating trace data across different system layers, from application code to middleware and kernel. This holistic approach to performance analysis is essential for optimizing complex robotic systems where bottlenecks may span multiple components.
Looking forward, the ROS 2 logging and tracing ecosystem continues to evolve toward more integrated, automated, and accessible tools. The community is working on standardizing tracing instrumentation across core packages, improving visualization tools, and developing more sophisticated analysis algorithms for automated performance optimization recommendations.
Market Demand for Advanced Robotics Logging Solutions
The robotics industry is experiencing unprecedented growth, with the global robotics market projected to reach $260 billion by 2030. Within this expanding ecosystem, there is a significant and growing demand for advanced logging and tracing solutions that can support the complex requirements of modern robotic systems. This demand is particularly acute for ROS 2-based applications, where performance optimization and system reliability are critical factors.
Manufacturing and industrial automation sectors represent the largest market segment seeking sophisticated logging solutions. These industries require real-time performance monitoring and bottleneck identification to maintain production efficiency and minimize downtime. According to recent industry surveys, 78% of manufacturing companies implementing robotics solutions report that inadequate debugging and performance analysis tools are major obstacles to wider adoption.
Healthcare robotics presents another substantial market opportunity, with surgical and assistive robots requiring extremely reliable performance and comprehensive audit trails. In this sector, the ability to trace system behavior with minimal performance impact is not merely a technical preference but a regulatory requirement in many jurisdictions.
Autonomous vehicle developers constitute a rapidly growing segment demanding advanced tracing capabilities. These companies require sophisticated tools to analyze complex interactions between perception, decision-making, and control systems. The market size for specialized debugging tools in this sector alone is estimated to grow at 35% annually through 2027.
Research institutions and robotics startups represent a smaller but influential market segment. These organizations often operate at the cutting edge of robotics development and require flexible, powerful logging solutions that can adapt to novel architectures and experimental configurations.
Cross-platform compatibility has emerged as a critical market requirement, with 65% of robotics developers working across multiple operating systems and hardware platforms. Solutions that can seamlessly integrate with diverse environments command premium pricing and higher adoption rates.
Real-time performance analysis capabilities are increasingly demanded by the market, with 82% of professional robotics developers citing the need for tools that can identify bottlenecks without significantly impacting system performance. This requirement is particularly pronounced in applications with strict timing constraints, such as collaborative robots working alongside humans.
The market also shows strong preference for solutions that integrate with existing DevOps and monitoring infrastructures. Organizations are reluctant to adopt standalone tools that cannot connect with their established observability platforms, creating opportunities for solutions that bridge robotics-specific requirements with enterprise monitoring standards.
Manufacturing and industrial automation sectors represent the largest market segment seeking sophisticated logging solutions. These industries require real-time performance monitoring and bottleneck identification to maintain production efficiency and minimize downtime. According to recent industry surveys, 78% of manufacturing companies implementing robotics solutions report that inadequate debugging and performance analysis tools are major obstacles to wider adoption.
Healthcare robotics presents another substantial market opportunity, with surgical and assistive robots requiring extremely reliable performance and comprehensive audit trails. In this sector, the ability to trace system behavior with minimal performance impact is not merely a technical preference but a regulatory requirement in many jurisdictions.
Autonomous vehicle developers constitute a rapidly growing segment demanding advanced tracing capabilities. These companies require sophisticated tools to analyze complex interactions between perception, decision-making, and control systems. The market size for specialized debugging tools in this sector alone is estimated to grow at 35% annually through 2027.
Research institutions and robotics startups represent a smaller but influential market segment. These organizations often operate at the cutting edge of robotics development and require flexible, powerful logging solutions that can adapt to novel architectures and experimental configurations.
Cross-platform compatibility has emerged as a critical market requirement, with 65% of robotics developers working across multiple operating systems and hardware platforms. Solutions that can seamlessly integrate with diverse environments command premium pricing and higher adoption rates.
Real-time performance analysis capabilities are increasingly demanded by the market, with 82% of professional robotics developers citing the need for tools that can identify bottlenecks without significantly impacting system performance. This requirement is particularly pronounced in applications with strict timing constraints, such as collaborative robots working alongside humans.
The market also shows strong preference for solutions that integrate with existing DevOps and monitoring infrastructures. Organizations are reluctant to adopt standalone tools that cannot connect with their established observability platforms, creating opportunities for solutions that bridge robotics-specific requirements with enterprise monitoring standards.
Current State and Challenges in ROS 2 Tracing
ROS 2 tracing capabilities have evolved significantly since their introduction, with the ecosystem now supporting multiple tracing frameworks including LTTng, FTrace, and more recently, Perfetto. LTTng remains the primary tracing solution for ROS 2, offering kernel and userspace tracing with minimal overhead. The current implementation provides instrumentation points across core ROS 2 components, including the DDS middleware layer, allowing developers to capture detailed execution data.
Despite these advancements, ROS 2 tracing faces several technical challenges. Performance overhead remains a concern, particularly in resource-constrained robotic systems where computational efficiency is critical. While LTTng offers relatively low overhead compared to traditional logging, the cumulative impact of extensive tracing can still affect system performance in time-sensitive robotic applications.
Data volume management presents another significant challenge. Comprehensive tracing generates substantial amounts of data, creating storage and processing bottlenecks, especially in long-running robotic systems. Current solutions lack efficient mechanisms for selective tracing that would allow developers to focus on specific components or behaviors without capturing excessive data.
Integration complexity across the heterogeneous ROS 2 ecosystem poses additional difficulties. Different hardware platforms, operating systems, and middleware implementations require varying approaches to tracing, complicating standardization efforts. This is particularly evident in cross-platform development scenarios where tracing tools may not offer consistent functionality across all supported environments.
The attribution of performance bottlenecks remains technically challenging. While current tracing tools can identify timing anomalies, they often lack sophisticated analysis capabilities to automatically correlate these anomalies with their root causes. Developers must frequently perform manual analysis of trace data, a time-consuming process that requires significant expertise.
Visualization and analysis tools for ROS 2 trace data have improved with projects like Tracecompass providing ROS 2-specific views, but still lag behind the needs of complex robotic systems. Current tools struggle to present the multi-layered interactions between ROS nodes, middleware, and the operating system in intuitive ways that facilitate rapid debugging and optimization.
Security considerations also present challenges, as trace data may contain sensitive information about system behavior and configuration. The current tracing infrastructure lacks robust mechanisms for securing trace data, particularly in deployed systems where unauthorized access could reveal exploitable patterns or vulnerabilities.
Despite these advancements, ROS 2 tracing faces several technical challenges. Performance overhead remains a concern, particularly in resource-constrained robotic systems where computational efficiency is critical. While LTTng offers relatively low overhead compared to traditional logging, the cumulative impact of extensive tracing can still affect system performance in time-sensitive robotic applications.
Data volume management presents another significant challenge. Comprehensive tracing generates substantial amounts of data, creating storage and processing bottlenecks, especially in long-running robotic systems. Current solutions lack efficient mechanisms for selective tracing that would allow developers to focus on specific components or behaviors without capturing excessive data.
Integration complexity across the heterogeneous ROS 2 ecosystem poses additional difficulties. Different hardware platforms, operating systems, and middleware implementations require varying approaches to tracing, complicating standardization efforts. This is particularly evident in cross-platform development scenarios where tracing tools may not offer consistent functionality across all supported environments.
The attribution of performance bottlenecks remains technically challenging. While current tracing tools can identify timing anomalies, they often lack sophisticated analysis capabilities to automatically correlate these anomalies with their root causes. Developers must frequently perform manual analysis of trace data, a time-consuming process that requires significant expertise.
Visualization and analysis tools for ROS 2 trace data have improved with projects like Tracecompass providing ROS 2-specific views, but still lag behind the needs of complex robotic systems. Current tools struggle to present the multi-layered interactions between ROS nodes, middleware, and the operating system in intuitive ways that facilitate rapid debugging and optimization.
Security considerations also present challenges, as trace data may contain sensitive information about system behavior and configuration. The current tracing infrastructure lacks robust mechanisms for securing trace data, particularly in deployed systems where unauthorized access could reveal exploitable patterns or vulnerabilities.
Existing LTTng and Perfetto Implementation Approaches
01 Logging and tracing frameworks for performance monitoring
Specialized logging and tracing frameworks like LTTng and Perfetto can be integrated with ROS 2 to monitor system performance and identify bottlenecks. These frameworks provide low-overhead tracing capabilities that capture detailed execution data, allowing developers to analyze timing issues, resource utilization, and communication patterns in distributed robotic systems. The collected trace data can be visualized and analyzed to pinpoint performance bottlenecks in ROS 2 applications.- Logging and tracing frameworks for performance monitoring: Various logging and tracing frameworks like LTTng and Perfetto can be integrated with ROS 2 to monitor system performance and identify bottlenecks. These frameworks provide mechanisms to collect detailed execution data with minimal overhead, allowing developers to trace function calls, message passing, and resource utilization across distributed robotic systems. The collected data can be visualized and analyzed to attribute performance issues to specific components or processes.
- Bottleneck detection and attribution techniques: Specialized algorithms and methods can be employed to detect and attribute bottlenecks in ROS 2 systems. These techniques involve analyzing execution traces, identifying patterns of resource contention, and correlating performance anomalies with specific system events. By examining timing relationships between components and measuring latencies in message passing, these methods can pinpoint the root causes of performance degradation in complex robotic software architectures.
- Real-time monitoring and visualization tools: Real-time monitoring and visualization tools enable developers to observe ROS 2 system behavior during operation. These tools process logging and tracing data to generate intuitive visualizations of system performance, resource utilization, and message flow. Interactive dashboards allow for drill-down analysis of bottlenecks, with capabilities to filter, aggregate, and correlate events across different system components, making it easier to attribute performance issues to specific code sections or architectural decisions.
- Distributed tracing for multi-node ROS 2 systems: Distributed tracing solutions address the challenge of monitoring performance across multiple ROS 2 nodes running on different machines. These systems collect and correlate trace data from various sources, maintaining causal relationships between events despite network delays and clock synchronization issues. By providing end-to-end visibility into distributed processing chains, these solutions help identify cross-node bottlenecks and attribute performance problems to specific communication patterns or resource constraints.
- Automated bottleneck analysis and optimization: Advanced systems can automatically analyze logging and tracing data to identify bottlenecks and suggest optimizations. These systems employ machine learning algorithms to detect performance patterns, correlate system metrics with code execution, and predict potential bottlenecks before they become critical. By continuously monitoring system behavior and comparing against performance models, these tools can attribute performance issues to specific causes and recommend targeted improvements to the ROS 2 application architecture.
02 Bottleneck attribution techniques in distributed systems
Methods for identifying and attributing performance bottlenecks in distributed systems like ROS 2 involve collecting metrics across multiple nodes and analyzing communication patterns. These techniques use correlation analysis to identify causal relationships between performance issues and specific components. By tracking message flow and processing times across the distributed architecture, the system can attribute performance degradation to specific nodes, communication channels, or resource constraints, enabling targeted optimization.Expand Specific Solutions03 Real-time performance monitoring and visualization
Real-time monitoring tools for ROS 2 provide immediate feedback on system performance through visualization interfaces. These tools capture and display metrics such as message latency, CPU usage, memory consumption, and network bandwidth in real-time dashboards. The visualization components help developers quickly identify performance anomalies and bottlenecks during system operation, allowing for faster debugging and optimization of ROS 2 applications.Expand Specific Solutions04 Automated bottleneck detection and analysis
Automated systems for detecting and analyzing performance bottlenecks in ROS 2 applications use machine learning and statistical methods to identify patterns in trace data. These systems can automatically flag anomalous behavior, classify different types of bottlenecks, and suggest potential solutions. By continuously monitoring system performance and comparing against historical baselines, these tools can detect gradual performance degradation and help maintain optimal system operation.Expand Specific Solutions05 Cross-layer performance analysis for ROS 2
Cross-layer performance analysis techniques examine bottlenecks across different layers of the ROS 2 stack, from application code to middleware to operating system. These methods correlate events and metrics from multiple layers to provide a comprehensive view of performance issues. By understanding how bottlenecks propagate across layers, developers can implement more effective optimizations that address root causes rather than symptoms, leading to more robust ROS 2 applications.Expand Specific Solutions
Key Players in ROS 2 Ecosystem and Tracing Tools
The ROS 2 logging and tracing ecosystem is currently in a growth phase, with market size expanding as robotics applications proliferate across industries. The technology maturity varies across implementation approaches, with LTTng offering more established tracing capabilities while Perfetto represents newer, emerging solutions. Key players shaping this landscape include Samsung Electronics and Ericsson, who contribute significantly to performance monitoring frameworks, while IBM and Huawei Technologies are advancing enterprise-grade logging solutions. Academic institutions like Southeast University and Dalian University of Technology are conducting foundational research on bottleneck attribution methodologies. The competitive dynamics are characterized by both open-source collaboration and proprietary extensions, with companies like Inspur and Alibaba Group developing specialized implementations for cloud-native robotics applications.
International Business Machines Corp.
Technical Solution: IBM has developed a comprehensive ROS 2 logging and tracing solution that leverages their expertise in enterprise systems monitoring. Their approach combines LTTng for kernel-level tracing with custom instrumentation of ROS 2 middleware components, providing visibility across the entire software stack. The framework implements a centralized logging architecture with distributed collection agents that minimize the performance impact on individual robots while enabling fleet-wide analysis. IBM's implementation includes sophisticated anomaly detection algorithms that analyze trace data to identify unusual patterns in system behavior that may indicate emerging problems before they cause failures. Their bottleneck attribution system uses causal analysis techniques to establish relationships between system events and performance degradation, helping engineers understand not just where bottlenecks occur but why they happen. The solution also features integration with IBM's Watson AI platform for advanced pattern recognition in trace data, enabling predictive maintenance and proactive optimization of robotic systems based on historical performance patterns.
Strengths: Powerful AI-assisted analysis capabilities; excellent scalability for enterprise deployments; sophisticated anomaly detection for preventive maintenance. Weaknesses: Higher computational requirements than simpler solutions; complex configuration and setup process; potential vendor lock-in with proprietary analysis tools.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed an advanced ROS 2 logging and tracing framework that integrates LTTng for kernel-level tracing with their proprietary distributed systems monitoring tools. Their solution implements a hierarchical logging architecture that categorizes messages based on severity and component, allowing for dynamic filtering and reduced overhead during normal operation. Huawei's implementation extends ROS 2's native logging capabilities with custom trace points that capture timing information across distributed robotic systems, particularly useful in their smart manufacturing applications. The framework includes automated bottleneck detection algorithms that analyze trace data to identify performance issues in real-time, with visualization tools that present system behavior timelines alongside resource utilization metrics. This enables engineers to correlate high-level application events with low-level system activities.
Strengths: Comprehensive integration with industrial automation systems; excellent scalability for large robot fleets; sophisticated bottleneck attribution with AI-assisted root cause analysis. Weaknesses: Proprietary components limit community contribution; higher computational overhead than lightweight alternatives; steep learning curve for configuration.
Core Tracing Technologies Analysis for ROS 2
Fault log information processing method and electronic equipment
PatentPendingCN120492410A
Innovation
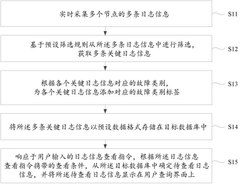
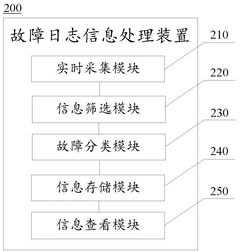
- The log information of multiple nodes is collected in real time, the key logs are filtered based on preset filtering rules (log level and keywords), the fault category tag is added, and stored in the target database in a unified data format, and the log information is displayed in response to user query instructions.
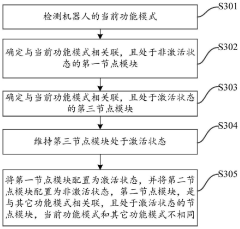
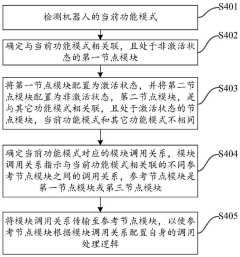
Robot control method, device, robot and storage medium
PatentActiveCN115674170B
Innovation
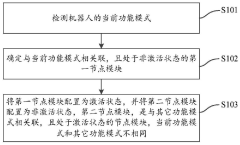
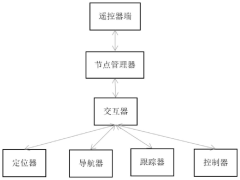
- By detecting the current functional mode of the robot, determine the node modules associated with this mode but in the inactive state, configure them to the active state, configure the node modules associated with other functional modes to the inactive state, and maintain the node modules in the activated state. , and transfer module calling relationships to optimize call processing logic.
Performance Benchmarking Methodologies
Effective performance benchmarking methodologies are crucial for evaluating the efficiency and bottlenecks in ROS 2 logging and tracing systems. When benchmarking LTTng, Perfetto, and other tracing tools in ROS 2 environments, standardized approaches ensure reliable and reproducible results.
The primary benchmarking dimensions for ROS 2 logging/tracing systems include throughput capacity, latency overhead, CPU utilization, memory consumption, and disk I/O impact. These metrics must be measured under various workloads to provide comprehensive performance profiles.
Synthetic workload generation represents a fundamental approach, where controlled message patterns with predetermined frequencies and sizes simulate real-world scenarios. This methodology allows for isolated testing of specific system aspects while maintaining experimental control.
Real-world application benchmarking complements synthetic testing by executing actual ROS 2 applications with different complexity levels. Navigation stacks, perception pipelines, and multi-node communication scenarios provide realistic performance insights that synthetic tests alone cannot capture.
Comparative analysis methodologies are essential when evaluating different tracing solutions. Direct comparisons between LTTng and Perfetto must utilize identical workloads, system configurations, and measurement techniques to ensure fair assessment. Baseline measurements without tracing enabled establish the performance impact reference point.
Scalability testing methodologies examine how logging and tracing performance changes with increasing system complexity. This involves progressively adding nodes, topics, and message frequencies while monitoring system behavior. The scaling curves reveal potential bottlenecks before they manifest in production environments.
Statistical rigor in benchmarking requires multiple test iterations with appropriate warm-up periods to account for system variability. Confidence intervals and standard deviations should accompany all reported metrics, ensuring results reliability and reproducibility.
Hardware-specific considerations must be addressed through benchmarking across different computational platforms, from embedded systems to high-performance computers. This cross-platform testing reveals how tracing tools perform under various resource constraints and identifies platform-specific optimizations.
Automated benchmarking frameworks enable continuous performance monitoring throughout development cycles. Tools like ros2_tracing_analysis and performance_test can be integrated into CI/CD pipelines to detect performance regressions early and maintain system efficiency over time.
The primary benchmarking dimensions for ROS 2 logging/tracing systems include throughput capacity, latency overhead, CPU utilization, memory consumption, and disk I/O impact. These metrics must be measured under various workloads to provide comprehensive performance profiles.
Synthetic workload generation represents a fundamental approach, where controlled message patterns with predetermined frequencies and sizes simulate real-world scenarios. This methodology allows for isolated testing of specific system aspects while maintaining experimental control.
Real-world application benchmarking complements synthetic testing by executing actual ROS 2 applications with different complexity levels. Navigation stacks, perception pipelines, and multi-node communication scenarios provide realistic performance insights that synthetic tests alone cannot capture.
Comparative analysis methodologies are essential when evaluating different tracing solutions. Direct comparisons between LTTng and Perfetto must utilize identical workloads, system configurations, and measurement techniques to ensure fair assessment. Baseline measurements without tracing enabled establish the performance impact reference point.
Scalability testing methodologies examine how logging and tracing performance changes with increasing system complexity. This involves progressively adding nodes, topics, and message frequencies while monitoring system behavior. The scaling curves reveal potential bottlenecks before they manifest in production environments.
Statistical rigor in benchmarking requires multiple test iterations with appropriate warm-up periods to account for system variability. Confidence intervals and standard deviations should accompany all reported metrics, ensuring results reliability and reproducibility.
Hardware-specific considerations must be addressed through benchmarking across different computational platforms, from embedded systems to high-performance computers. This cross-platform testing reveals how tracing tools perform under various resource constraints and identifies platform-specific optimizations.
Automated benchmarking frameworks enable continuous performance monitoring throughout development cycles. Tools like ros2_tracing_analysis and performance_test can be integrated into CI/CD pipelines to detect performance regressions early and maintain system efficiency over time.
Real-time Debugging Strategies for Autonomous Systems
Real-time debugging in autonomous systems presents unique challenges due to their complex, distributed nature and safety-critical operations. When examining ROS 2's logging and tracing capabilities, several strategic approaches emerge for effective real-time debugging.
LTTng (Linux Trace Toolkit Next Generation) offers kernel-level tracing with minimal overhead, making it particularly valuable for autonomous systems where performance degradation during debugging could compromise safety. Its ability to capture high-resolution timestamps enables precise correlation of events across distributed components, essential for identifying race conditions and timing-related issues in autonomous vehicle control systems.
Perfetto provides a comprehensive performance instrumentation platform that complements LTTng by focusing on application-level tracing. Its visualization capabilities allow engineers to identify execution bottlenecks in perception algorithms and decision-making processes. The integration of Perfetto with ROS 2 enables developers to trace message passing between nodes and identify communication latencies that may impact system responsiveness.
Bottleneck attribution techniques leverage both LTTng and Perfetto data to systematically identify performance constraints. This approach involves establishing performance baselines during normal operation and comparing them against anomalous behavior. Machine learning algorithms can be applied to trace data to automatically detect patterns indicative of resource contention or algorithmic inefficiencies.
For autonomous systems, real-time debugging must be non-intrusive. Techniques such as flight recorder patterns, where trace data is continuously collected in a circular buffer and only preserved when triggered by anomalous events, minimize the impact on system performance while ensuring critical diagnostic information is available when needed.
Remote debugging capabilities are essential for deployed autonomous systems. Secure telemetry channels allow engineers to access trace data from operational systems without physical access, enabling rapid response to emerging issues. Selective tracing strategies can be employed to focus on specific subsystems suspected of malfunction, reducing data volume while maintaining diagnostic value.
Visualization tools that render trace data in intuitive formats significantly accelerate the debugging process. Timeline views that correlate events across distributed components help identify causal relationships between seemingly unrelated anomalies. Heat maps highlighting resource utilization patterns can reveal subtle inefficiencies that accumulate to create significant performance issues.
LTTng (Linux Trace Toolkit Next Generation) offers kernel-level tracing with minimal overhead, making it particularly valuable for autonomous systems where performance degradation during debugging could compromise safety. Its ability to capture high-resolution timestamps enables precise correlation of events across distributed components, essential for identifying race conditions and timing-related issues in autonomous vehicle control systems.
Perfetto provides a comprehensive performance instrumentation platform that complements LTTng by focusing on application-level tracing. Its visualization capabilities allow engineers to identify execution bottlenecks in perception algorithms and decision-making processes. The integration of Perfetto with ROS 2 enables developers to trace message passing between nodes and identify communication latencies that may impact system responsiveness.
Bottleneck attribution techniques leverage both LTTng and Perfetto data to systematically identify performance constraints. This approach involves establishing performance baselines during normal operation and comparing them against anomalous behavior. Machine learning algorithms can be applied to trace data to automatically detect patterns indicative of resource contention or algorithmic inefficiencies.
For autonomous systems, real-time debugging must be non-intrusive. Techniques such as flight recorder patterns, where trace data is continuously collected in a circular buffer and only preserved when triggered by anomalous events, minimize the impact on system performance while ensuring critical diagnostic information is available when needed.
Remote debugging capabilities are essential for deployed autonomous systems. Secure telemetry channels allow engineers to access trace data from operational systems without physical access, enabling rapid response to emerging issues. Selective tracing strategies can be employed to focus on specific subsystems suspected of malfunction, reducing data volume while maintaining diagnostic value.
Visualization tools that render trace data in intuitive formats significantly accelerate the debugging process. Timeline views that correlate events across distributed components help identify causal relationships between seemingly unrelated anomalies. Heat maps highlighting resource utilization patterns can reveal subtle inefficiencies that accumulate to create significant performance issues.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!