

How To Integrate Kalman Filter With GPS Data
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter and GPS Integration Background and Objectives
The integration of Kalman filters with GPS data represents a significant advancement in navigation and positioning technologies. This fusion technique emerged in the late 1990s as a response to the inherent limitations of standalone GPS systems, which suffer from signal degradation, multipath effects, and atmospheric interference. The evolution of this technology has been driven by increasing demands for precise location data in various applications, from consumer electronics to autonomous vehicles and aerospace systems.
The Kalman filter, developed by Rudolf E. Kalman in 1960, provides a mathematical framework for estimating the state of a system when the measurements contain noise and other inaccuracies. When applied to GPS data, it enables the prediction of position, velocity, and acceleration with greater accuracy than raw GPS measurements alone.
The technological trajectory has seen significant milestones, including the implementation of Extended Kalman Filters (EKF) in the early 2000s to address non-linear systems, followed by Unscented Kalman Filters (UKF) which further improved performance in highly non-linear navigation scenarios. Recent developments include adaptive filtering techniques that dynamically adjust to changing environmental conditions.
Market forces have played a crucial role in accelerating this technology's development, particularly with the proliferation of smartphones, autonomous vehicles, and precision agriculture requiring increasingly accurate positioning systems. The integration of Kalman filters with GPS has evolved from specialized military applications to become a standard component in consumer-grade navigation systems.
The primary objective of Kalman filter and GPS integration is to overcome the limitations of standalone GPS systems by combining the strengths of multiple data sources. This includes enhancing positioning accuracy in challenging environments such as urban canyons, tunnels, or dense foliage where GPS signals may be compromised.
Additional technical goals include reducing the impact of measurement noise, compensating for sensor biases, improving system reliability through redundancy, and enabling continuous navigation during temporary GPS outages. The integration also aims to optimize power consumption and computational efficiency, particularly important for mobile and embedded applications.
Looking forward, the technology aims to achieve sub-meter accuracy in consumer applications and centimeter-level precision for specialized industrial uses. The integration of Kalman filters with GPS data continues to evolve, incorporating additional sensors such as inertial measurement units (IMUs), barometers, and magnetometers to create more robust and accurate positioning systems.
The Kalman filter, developed by Rudolf E. Kalman in 1960, provides a mathematical framework for estimating the state of a system when the measurements contain noise and other inaccuracies. When applied to GPS data, it enables the prediction of position, velocity, and acceleration with greater accuracy than raw GPS measurements alone.
The technological trajectory has seen significant milestones, including the implementation of Extended Kalman Filters (EKF) in the early 2000s to address non-linear systems, followed by Unscented Kalman Filters (UKF) which further improved performance in highly non-linear navigation scenarios. Recent developments include adaptive filtering techniques that dynamically adjust to changing environmental conditions.
Market forces have played a crucial role in accelerating this technology's development, particularly with the proliferation of smartphones, autonomous vehicles, and precision agriculture requiring increasingly accurate positioning systems. The integration of Kalman filters with GPS has evolved from specialized military applications to become a standard component in consumer-grade navigation systems.
The primary objective of Kalman filter and GPS integration is to overcome the limitations of standalone GPS systems by combining the strengths of multiple data sources. This includes enhancing positioning accuracy in challenging environments such as urban canyons, tunnels, or dense foliage where GPS signals may be compromised.
Additional technical goals include reducing the impact of measurement noise, compensating for sensor biases, improving system reliability through redundancy, and enabling continuous navigation during temporary GPS outages. The integration also aims to optimize power consumption and computational efficiency, particularly important for mobile and embedded applications.
Looking forward, the technology aims to achieve sub-meter accuracy in consumer applications and centimeter-level precision for specialized industrial uses. The integration of Kalman filters with GPS data continues to evolve, incorporating additional sensors such as inertial measurement units (IMUs), barometers, and magnetometers to create more robust and accurate positioning systems.
Market Demand Analysis for Precise Location Services
The precise location services market is experiencing unprecedented growth driven by the increasing demand for accurate positioning across multiple industries. The global market for high-precision GNSS solutions was valued at approximately $3.1 billion in 2022 and is projected to reach $5.9 billion by 2027, representing a compound annual growth rate of 13.8%. This growth trajectory is fueled by the expanding applications of location-based services in autonomous vehicles, smart cities, logistics, and consumer electronics.
In the automotive sector, the integration of Kalman filters with GPS data has become essential for advanced driver-assistance systems (ADAS) and autonomous driving technologies. Market research indicates that over 70% of new vehicles will incorporate some form of precise positioning technology by 2025, creating a substantial market opportunity for enhanced GPS solutions that utilize Kalman filtering techniques.
The logistics and transportation industry represents another significant market segment, with companies increasingly adopting precise location services to optimize route planning, reduce fuel consumption, and improve delivery efficiency. Studies show that implementation of advanced GPS solutions with Kalman filtering can reduce operational costs by up to 15% and improve delivery time accuracy by 30%.
Consumer electronics manufacturers are also driving market demand, with smartphones and wearable devices incorporating increasingly sophisticated location capabilities. The premium smartphone segment, which accounts for approximately 20% of the global smartphone market, has begun implementing dual-frequency GNSS receivers and sensor fusion algorithms that benefit from Kalman filter integration.
Emerging applications in precision agriculture, drone navigation, and augmented reality are creating new market opportunities. The precision agriculture market alone is expected to grow at 14.2% annually through 2026, with positioning accuracy being a critical component of autonomous farming equipment and field mapping solutions.
Regional analysis reveals that North America currently holds the largest market share at 38%, followed by Europe (29%) and Asia-Pacific (24%). However, the Asia-Pacific region is expected to witness the fastest growth rate due to rapid urbanization, infrastructure development, and increasing adoption of IoT technologies in countries like China, Japan, and South Korea.
Market challenges include price sensitivity in consumer applications, technical complexity of implementation, and the need for specialized expertise. Despite these challenges, the overall market outlook remains highly positive as industries continue to recognize the value of precise location data in improving operational efficiency, enhancing user experiences, and enabling new service offerings.
In the automotive sector, the integration of Kalman filters with GPS data has become essential for advanced driver-assistance systems (ADAS) and autonomous driving technologies. Market research indicates that over 70% of new vehicles will incorporate some form of precise positioning technology by 2025, creating a substantial market opportunity for enhanced GPS solutions that utilize Kalman filtering techniques.
The logistics and transportation industry represents another significant market segment, with companies increasingly adopting precise location services to optimize route planning, reduce fuel consumption, and improve delivery efficiency. Studies show that implementation of advanced GPS solutions with Kalman filtering can reduce operational costs by up to 15% and improve delivery time accuracy by 30%.
Consumer electronics manufacturers are also driving market demand, with smartphones and wearable devices incorporating increasingly sophisticated location capabilities. The premium smartphone segment, which accounts for approximately 20% of the global smartphone market, has begun implementing dual-frequency GNSS receivers and sensor fusion algorithms that benefit from Kalman filter integration.
Emerging applications in precision agriculture, drone navigation, and augmented reality are creating new market opportunities. The precision agriculture market alone is expected to grow at 14.2% annually through 2026, with positioning accuracy being a critical component of autonomous farming equipment and field mapping solutions.
Regional analysis reveals that North America currently holds the largest market share at 38%, followed by Europe (29%) and Asia-Pacific (24%). However, the Asia-Pacific region is expected to witness the fastest growth rate due to rapid urbanization, infrastructure development, and increasing adoption of IoT technologies in countries like China, Japan, and South Korea.
Market challenges include price sensitivity in consumer applications, technical complexity of implementation, and the need for specialized expertise. Despite these challenges, the overall market outlook remains highly positive as industries continue to recognize the value of precise location data in improving operational efficiency, enhancing user experiences, and enabling new service offerings.
Current State and Challenges in GPS-Kalman Integration
The integration of Kalman filters with GPS data represents a critical technological advancement in positioning systems, yet faces significant challenges in implementation. Currently, this integration is widely adopted across various industries including automotive navigation, drone operations, and mobile device location services. The fundamental approach involves using Kalman filters to process and refine raw GPS signals, compensating for inherent inaccuracies and environmental interference.
Global positioning systems typically provide location data with accuracy ranges from 3-15 meters under optimal conditions. However, this precision deteriorates significantly in urban canyons, under dense foliage, or during adverse atmospheric conditions. The current state of GPS-Kalman integration addresses these limitations through sophisticated error modeling and prediction algorithms, achieving sub-meter accuracy in favorable environments.
One major technical challenge remains the handling of non-Gaussian noise distributions in GPS signals. While the standard Kalman filter assumes Gaussian distribution of errors, real-world GPS signals often exhibit multipath effects and atmospheric distortions that create non-Gaussian error patterns. This mismatch between theoretical assumptions and practical conditions leads to suboptimal filter performance in complex environments.
Another significant hurdle is computational efficiency, particularly for mobile and embedded systems with limited processing capabilities. The implementation of Extended Kalman Filters (EKF) or Unscented Kalman Filters (UKF) necessary for handling non-linear GPS models demands substantial computational resources, creating a trade-off between accuracy and power consumption.
Sensor fusion represents both a current solution and ongoing challenge. Modern systems increasingly combine GPS data with inertial measurement units (IMUs), magnetometers, and other sensors. While this multi-sensor approach improves reliability, it introduces additional complexity in filter design and calibration procedures. Current integration methods struggle with optimal weighting of different sensor inputs under varying environmental conditions.
Initialization problems persist in practical applications, where determining the initial state estimate and error covariance matrix significantly impacts subsequent filter performance. Poor initialization can lead to filter divergence or extended convergence periods, reducing system reliability during critical startup phases.
The geographic distribution of GPS-Kalman integration technology shows concentration in North America, Europe, and East Asia, with emerging research centers in India and Brazil. This distribution reflects both technological capabilities and market demands across regions, with automotive and aerospace industries driving much of the innovation.
Global positioning systems typically provide location data with accuracy ranges from 3-15 meters under optimal conditions. However, this precision deteriorates significantly in urban canyons, under dense foliage, or during adverse atmospheric conditions. The current state of GPS-Kalman integration addresses these limitations through sophisticated error modeling and prediction algorithms, achieving sub-meter accuracy in favorable environments.
One major technical challenge remains the handling of non-Gaussian noise distributions in GPS signals. While the standard Kalman filter assumes Gaussian distribution of errors, real-world GPS signals often exhibit multipath effects and atmospheric distortions that create non-Gaussian error patterns. This mismatch between theoretical assumptions and practical conditions leads to suboptimal filter performance in complex environments.
Another significant hurdle is computational efficiency, particularly for mobile and embedded systems with limited processing capabilities. The implementation of Extended Kalman Filters (EKF) or Unscented Kalman Filters (UKF) necessary for handling non-linear GPS models demands substantial computational resources, creating a trade-off between accuracy and power consumption.
Sensor fusion represents both a current solution and ongoing challenge. Modern systems increasingly combine GPS data with inertial measurement units (IMUs), magnetometers, and other sensors. While this multi-sensor approach improves reliability, it introduces additional complexity in filter design and calibration procedures. Current integration methods struggle with optimal weighting of different sensor inputs under varying environmental conditions.
Initialization problems persist in practical applications, where determining the initial state estimate and error covariance matrix significantly impacts subsequent filter performance. Poor initialization can lead to filter divergence or extended convergence periods, reducing system reliability during critical startup phases.
The geographic distribution of GPS-Kalman integration technology shows concentration in North America, Europe, and East Asia, with emerging research centers in India and Brazil. This distribution reflects both technological capabilities and market demands across regions, with automotive and aerospace industries driving much of the innovation.
Current Implementation Approaches for Kalman-GPS Systems
01 Kalman Filter for Navigation and Positioning Systems
Kalman filters are integrated into navigation and positioning systems to improve accuracy by fusing data from multiple sensors. These implementations help reduce noise and errors in GPS, inertial navigation systems, and other location-tracking technologies. The filter algorithms continuously estimate position and velocity states while accounting for measurement uncertainties, providing more reliable navigation solutions in various environments.- Kalman Filter for Navigation and Positioning Systems: Kalman filters are integrated into navigation and positioning systems to improve accuracy by fusing data from multiple sensors. These implementations help in reducing errors in GPS, inertial navigation systems, and other location-tracking technologies. The filter algorithms process noisy sensor measurements to provide optimal state estimation for position, velocity, and orientation in real-time applications.
- Sensor Fusion Applications: Kalman filtering techniques are employed for sensor fusion applications where data from multiple heterogeneous sensors need to be integrated. This approach combines measurements from different sources such as accelerometers, gyroscopes, magnetometers, and other sensors to provide more reliable and accurate information than any single sensor could provide alone. The integration helps in compensating for individual sensor limitations and environmental disturbances.
- Communication Systems and Signal Processing: Kalman filters are integrated into communication systems for signal processing, channel estimation, and noise reduction. These implementations help in tracking and predicting signal parameters in wireless communications, improving signal quality, and enhancing data transmission reliability. The adaptive nature of Kalman filters makes them particularly useful in environments with varying signal conditions.
- Extended and Unscented Kalman Filter Variants: Advanced variants of Kalman filters, such as Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF), are implemented to handle non-linear systems. These sophisticated algorithms extend the traditional Kalman filter's capabilities to address complex estimation problems where linear approximations are insufficient. They provide more accurate state estimation in highly dynamic and non-linear environments.
- Real-time Implementation and Computational Optimization: Techniques for optimizing Kalman filter implementations focus on reducing computational complexity and enabling real-time processing. These approaches include algorithm modifications, parallel processing architectures, and hardware-specific optimizations. Such implementations are crucial for resource-constrained systems and applications requiring high-frequency updates, such as autonomous vehicles, drones, and mobile devices.
02 Sensor Fusion Applications
Kalman filtering techniques are applied to sensor fusion applications where data from multiple sensors need to be integrated to provide more accurate measurements. This approach combines information from different sensor types (such as accelerometers, gyroscopes, and magnetometers) to overcome the limitations of individual sensors. The integration enables robust performance in challenging environments by dynamically weighting inputs based on their estimated reliability.Expand Specific Solutions03 Communication Systems Integration
Kalman filters are integrated into communication systems for signal processing, channel estimation, and synchronization. These implementations help track and correct for frequency offsets, phase noise, and timing errors in wireless communications. The adaptive nature of Kalman filtering allows communication systems to maintain performance despite changing channel conditions and interference.Expand Specific Solutions04 Extended and Unscented Kalman Filter Variants
Advanced variants of the Kalman filter, such as Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF), are integrated into systems dealing with non-linear dynamics. These implementations handle complex state estimation problems where traditional linear Kalman filters would be insufficient. The variants use different approaches to linearization or statistical approximation to maintain accuracy when processing non-linear measurements or system models.Expand Specific Solutions05 Real-time Implementation and Optimization
Techniques for efficient real-time implementation of Kalman filters in embedded systems and mobile devices focus on computational optimization and resource management. These approaches include algorithm simplifications, parallel processing methods, and hardware-specific optimizations to reduce processing requirements while maintaining estimation accuracy. The implementations enable Kalman filtering in resource-constrained environments such as mobile devices, drones, and IoT applications.Expand Specific Solutions
Key Industry Players in Navigation and Positioning Systems
The integration of Kalman filters with GPS data represents a mature technology field with established applications across multiple industries. The market is characterized by significant players including Honeywell International, Thales SA, and Robert Bosch GmbH who have developed sophisticated implementations for navigation systems. Apple and Samsung Electronics have integrated these technologies into consumer devices, while automotive companies like Toyota Motor Corp. utilize them for vehicle positioning systems. The technology has reached commercial maturity with specialized providers like NovAtel and Microinfinity offering high-precision solutions. Academic institutions including Beihang University and Southeast University continue advancing theoretical frameworks, while government entities and defense contractors such as QinetiQ and Safran Electronics & Defense drive innovation for military-grade applications requiring enhanced accuracy and reliability.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has developed a comprehensive Kalman filter integration system for GPS data that forms the core of their navigation solutions for commercial aviation and industrial applications. Their approach utilizes a modular Unscented Kalman Filter (UKF) architecture that better handles the non-linearities inherent in navigation problems compared to traditional Extended Kalman Filters. Honeywell's implementation features adaptive tuning algorithms that continuously optimize filter parameters based on detected motion states and environmental conditions[5]. For aviation applications, their system seamlessly integrates GPS data with aircraft air data systems, radio navigation aids, and inertial reference systems to provide Required Navigation Performance (RNP) capabilities. The solution incorporates sophisticated fault detection and exclusion mechanisms that can identify and isolate erroneous GPS measurements, maintaining system integrity even during partial satellite constellation outages or signal interference events[6]. Honeywell's technology achieves position accuracy within 3 meters for aviation applications and supports precision approaches in challenging weather conditions.
Strengths: Exceptional reliability with proven performance in safety-critical aviation applications; sophisticated fault detection capabilities; seamless integration with existing avionics systems; certified for commercial aviation use with extensive flight testing validation. Weaknesses: Highly specialized for aviation applications with less optimization for other domains; significant implementation complexity requiring specialized expertise; premium pricing reflecting aviation certification requirements; proprietary architecture limiting third-party modifications.
Thales SA
Technical Solution: Thales has pioneered a sophisticated Kalman filter integration system for GPS data specifically designed for mission-critical applications in aerospace and defense. Their solution implements a tightly-coupled architecture that directly processes raw GPS measurements (pseudoranges, carrier phases) within the Kalman filter rather than using pre-computed positions. This approach enables centimeter-level positioning accuracy even in challenging signal environments[2]. Thales' implementation features a federated filter structure that maintains multiple parallel Kalman filters for different sensor combinations, with a master filter that optimally combines their outputs based on real-time reliability assessments. The system incorporates advanced integrity monitoring algorithms that detect and mitigate multipath effects, ionospheric disturbances, and intentional jamming attempts. For military applications, Thales has developed specialized modules that integrate encrypted GPS signals (P(Y) and M-code) with their Kalman filter architecture, providing enhanced security and resistance to spoofing attacks[4].
Strengths: Exceptional accuracy and reliability in challenging environments; advanced security features for military applications; proven track record in mission-critical systems; sophisticated integrity monitoring capabilities. Weaknesses: High implementation complexity requiring specialized expertise; significant computational overhead; premium pricing reflecting the high-end positioning capabilities; primarily optimized for aerospace/defense rather than consumer applications.
Core Algorithms and Mathematical Foundations
Vehicular GPS/DR navigation with environmental-adaptive kalman filter gain
PatentActiveUS9366764B2
Innovation
- The system identifies the vehicle's environment using parameters such as speed, number of tracked satellites, and Dilution of Precision (DOP) to adjust the Kalman filter gain, optimizing the weight given to GNSS and DR navigation, thereby improving position estimation accuracy across different environments.




Inertial navigation unit comprising an integrated GPS receiver
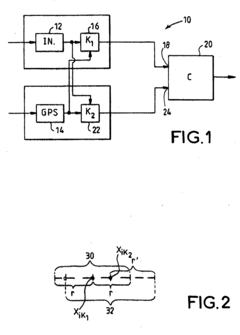
PatentInactiveEP1205732A2
Innovation
- The integration of two Kalman filters with different algorithms and processors, along with distinct compilers, is used to enhance the reliability of the state vector data, ensuring consistency and validating data through confidence intervals to detect and address potential software errors.
Performance Metrics and Evaluation Methods
Evaluating the performance of Kalman filter integration with GPS data requires comprehensive metrics and methodologies to ensure optimal system operation. Position accuracy serves as the primary metric, typically measured through Root Mean Square Error (RMSE) between filtered positions and ground truth references. This quantifies the system's ability to accurately determine spatial coordinates, with lower values indicating superior performance. Velocity accuracy, similarly assessed via RMSE, evaluates the system's capability to track movement dynamics accurately, particularly crucial for applications involving rapid directional changes.
Filter consistency represents another critical evaluation dimension, measured through Normalized Estimation Error Squared (NEES) and innovation sequence analysis. These statistical tools verify whether the filter's uncertainty estimates align with actual error distributions, preventing overconfidence or excessive conservatism in position estimates. Convergence speed metrics quantify how rapidly the filter stabilizes after initialization or significant disturbances, with faster convergence enabling more responsive navigation systems.
Robustness testing involves subjecting the integrated system to challenging scenarios including GPS signal outages, multipath effects, and urban canyon environments. Performance degradation under these conditions reveals the system's resilience and reliability in real-world applications. Computational efficiency metrics such as processing time per update cycle and memory utilization become particularly relevant for resource-constrained platforms like mobile devices or embedded systems.
For dynamic applications, trajectory smoothness evaluation examines the filter's ability to produce continuous, physically plausible paths without unrealistic jumps or oscillations. This can be quantified through path curvature analysis and acceleration profile examination. Cross-validation methodologies strengthen evaluation reliability by comparing filter performance across multiple independent datasets, ensuring consistent behavior across varying conditions.
Visualization techniques complement numerical metrics by providing intuitive representations of filter performance. Error ellipses, trajectory plots with uncertainty bounds, and residual analysis graphs enable deeper insights into system behavior and facilitate communication of results to stakeholders. Finally, comparative benchmarking against established methods such as complementary filters, particle filters, or extended Kalman filter variants contextualizes performance within the broader navigation solution landscape.
Filter consistency represents another critical evaluation dimension, measured through Normalized Estimation Error Squared (NEES) and innovation sequence analysis. These statistical tools verify whether the filter's uncertainty estimates align with actual error distributions, preventing overconfidence or excessive conservatism in position estimates. Convergence speed metrics quantify how rapidly the filter stabilizes after initialization or significant disturbances, with faster convergence enabling more responsive navigation systems.
Robustness testing involves subjecting the integrated system to challenging scenarios including GPS signal outages, multipath effects, and urban canyon environments. Performance degradation under these conditions reveals the system's resilience and reliability in real-world applications. Computational efficiency metrics such as processing time per update cycle and memory utilization become particularly relevant for resource-constrained platforms like mobile devices or embedded systems.
For dynamic applications, trajectory smoothness evaluation examines the filter's ability to produce continuous, physically plausible paths without unrealistic jumps or oscillations. This can be quantified through path curvature analysis and acceleration profile examination. Cross-validation methodologies strengthen evaluation reliability by comparing filter performance across multiple independent datasets, ensuring consistent behavior across varying conditions.
Visualization techniques complement numerical metrics by providing intuitive representations of filter performance. Error ellipses, trajectory plots with uncertainty bounds, and residual analysis graphs enable deeper insights into system behavior and facilitate communication of results to stakeholders. Finally, comparative benchmarking against established methods such as complementary filters, particle filters, or extended Kalman filter variants contextualizes performance within the broader navigation solution landscape.
Real-time Processing Considerations
Real-time processing of Kalman filter with GPS data presents unique challenges that must be addressed for effective implementation in dynamic systems. The computational demands of Kalman filtering algorithms require careful optimization to ensure timely processing of incoming GPS signals. In most real-world applications, processing must occur within strict time constraints, typically between 1-10Hz for standard navigation systems and up to 100Hz for high-precision tracking applications.
Resource allocation becomes a critical consideration when implementing Kalman filters on embedded systems with limited computational capabilities. Memory usage must be optimized through efficient matrix operations and state representation. Many implementations benefit from fixed-point arithmetic rather than floating-point calculations to reduce processing overhead, particularly on microcontrollers and low-power devices.
Latency management represents another significant challenge in real-time Kalman filter implementation. GPS data inherently arrives with varying delays, which can destabilize filter performance if not properly accounted for. Time-stamping incoming measurements and implementing buffer systems to manage asynchronous data streams helps maintain temporal consistency in the filtering process. Some advanced implementations employ predictive compensation techniques to adjust for known latency patterns in GPS receivers.
Power consumption considerations become paramount in mobile and battery-operated systems. Adaptive sampling rates can be implemented to balance accuracy requirements against power constraints, dynamically adjusting filter complexity based on movement patterns or environmental conditions. For instance, stationary objects require less frequent updates than those in rapid motion, allowing for power-saving adjustments.
Multi-threading and parallel processing architectures offer significant advantages for real-time Kalman filter implementation. By separating prediction and update steps across different processing threads, systems can maintain responsiveness while handling complex calculations. Modern embedded systems with multi-core processors can distribute filter operations across cores to maintain real-time performance even with complex state models.
Hardware acceleration presents an increasingly viable option for demanding applications. FPGA implementations of Kalman filters have demonstrated performance improvements of 10-100x compared to software implementations, making them suitable for applications requiring sub-millisecond response times. GPU acceleration has also proven effective for systems processing multiple concurrent filters or handling high-dimensional state spaces.
Resource allocation becomes a critical consideration when implementing Kalman filters on embedded systems with limited computational capabilities. Memory usage must be optimized through efficient matrix operations and state representation. Many implementations benefit from fixed-point arithmetic rather than floating-point calculations to reduce processing overhead, particularly on microcontrollers and low-power devices.
Latency management represents another significant challenge in real-time Kalman filter implementation. GPS data inherently arrives with varying delays, which can destabilize filter performance if not properly accounted for. Time-stamping incoming measurements and implementing buffer systems to manage asynchronous data streams helps maintain temporal consistency in the filtering process. Some advanced implementations employ predictive compensation techniques to adjust for known latency patterns in GPS receivers.
Power consumption considerations become paramount in mobile and battery-operated systems. Adaptive sampling rates can be implemented to balance accuracy requirements against power constraints, dynamically adjusting filter complexity based on movement patterns or environmental conditions. For instance, stationary objects require less frequent updates than those in rapid motion, allowing for power-saving adjustments.
Multi-threading and parallel processing architectures offer significant advantages for real-time Kalman filter implementation. By separating prediction and update steps across different processing threads, systems can maintain responsiveness while handling complex calculations. Modern embedded systems with multi-core processors can distribute filter operations across cores to maintain real-time performance even with complex state models.
Hardware acceleration presents an increasingly viable option for demanding applications. FPGA implementations of Kalman filters have demonstrated performance improvements of 10-100x compared to software implementations, making them suitable for applications requiring sub-millisecond response times. GPU acceleration has also proven effective for systems processing multiple concurrent filters or handling high-dimensional state spaces.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!