

Kalman Filter For Predictive Maintenance: Efficiency Targets
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Maintenance Objectives
The Kalman filter, developed by Rudolf E. Kalman in 1960, has evolved significantly over the past six decades. Initially designed for aerospace applications, particularly in the Apollo program for trajectory estimation, this recursive mathematical algorithm has expanded its utility across numerous domains. The filter's fundamental principle of combining measurement data with predicted system states to produce optimal estimates has remained consistent, though its implementations have diversified considerably.
In the 1970s and 1980s, the Extended Kalman Filter (EKF) emerged to address nonlinear system challenges, followed by the Unscented Kalman Filter (UKF) in the late 1990s, which improved accuracy for highly nonlinear systems without requiring Jacobian matrices. The 2000s witnessed the development of ensemble and particle-based variants, enhancing performance in high-dimensional and non-Gaussian environments.
Recent advancements have focused on computational efficiency and real-time processing capabilities, with adaptive Kalman filters that dynamically adjust parameters based on changing system conditions. The integration with machine learning techniques has further expanded the filter's capabilities, enabling more sophisticated pattern recognition and anomaly detection in complex systems.
In predictive maintenance contexts, Kalman filtering technology aims to achieve several critical efficiency targets. Primary among these is the reduction of unplanned downtime by accurately forecasting equipment failures before they occur. Studies indicate that predictive maintenance can reduce downtime by 30-50% compared to reactive maintenance strategies, translating to significant operational cost savings.
Another key objective is the optimization of maintenance scheduling, allowing organizations to transition from time-based to condition-based maintenance protocols. This shift typically results in 20-30% reduction in maintenance costs while extending equipment lifespan by 20-40%. The technology also targets the minimization of false positives and false negatives in failure prediction, with industry benchmarks aiming for precision and recall rates exceeding 85%.
Energy efficiency improvements represent another crucial target, with predictive maintenance systems seeking to maintain equipment at optimal performance levels, potentially reducing energy consumption by 5-15%. Additionally, these systems aim to decrease spare parts inventory by 20-30% through more accurate forecasting of component failures and replacement needs.
The evolution of Kalman filter applications in maintenance has progressively moved toward more holistic system monitoring, with current objectives focused on developing comprehensive digital twins that can simulate entire operational ecosystems and predict cascading failure effects across interconnected systems.
In the 1970s and 1980s, the Extended Kalman Filter (EKF) emerged to address nonlinear system challenges, followed by the Unscented Kalman Filter (UKF) in the late 1990s, which improved accuracy for highly nonlinear systems without requiring Jacobian matrices. The 2000s witnessed the development of ensemble and particle-based variants, enhancing performance in high-dimensional and non-Gaussian environments.
Recent advancements have focused on computational efficiency and real-time processing capabilities, with adaptive Kalman filters that dynamically adjust parameters based on changing system conditions. The integration with machine learning techniques has further expanded the filter's capabilities, enabling more sophisticated pattern recognition and anomaly detection in complex systems.
In predictive maintenance contexts, Kalman filtering technology aims to achieve several critical efficiency targets. Primary among these is the reduction of unplanned downtime by accurately forecasting equipment failures before they occur. Studies indicate that predictive maintenance can reduce downtime by 30-50% compared to reactive maintenance strategies, translating to significant operational cost savings.
Another key objective is the optimization of maintenance scheduling, allowing organizations to transition from time-based to condition-based maintenance protocols. This shift typically results in 20-30% reduction in maintenance costs while extending equipment lifespan by 20-40%. The technology also targets the minimization of false positives and false negatives in failure prediction, with industry benchmarks aiming for precision and recall rates exceeding 85%.
Energy efficiency improvements represent another crucial target, with predictive maintenance systems seeking to maintain equipment at optimal performance levels, potentially reducing energy consumption by 5-15%. Additionally, these systems aim to decrease spare parts inventory by 20-30% through more accurate forecasting of component failures and replacement needs.
The evolution of Kalman filter applications in maintenance has progressively moved toward more holistic system monitoring, with current objectives focused on developing comprehensive digital twins that can simulate entire operational ecosystems and predict cascading failure effects across interconnected systems.
Market Demand Analysis for Predictive Maintenance Solutions
The global predictive maintenance market is experiencing robust growth, projected to reach $23.5 billion by 2025 with a CAGR of 25-30%. This surge is primarily driven by industrial digitalization initiatives and the increasing adoption of Industry 4.0 technologies across manufacturing, energy, transportation, and healthcare sectors. Organizations are increasingly recognizing predictive maintenance as a critical component for operational excellence, with studies indicating potential reduction in maintenance costs by 25-30% and elimination of unplanned downtime by up to 70%.
Kalman filter-based predictive maintenance solutions are gaining particular traction due to their superior ability to handle noisy sensor data and provide accurate state estimation in dynamic systems. Market research indicates that approximately 40% of industrial equipment failures can be predicted with advanced algorithms like Kalman filters, creating substantial value proposition for businesses with critical infrastructure.
The demand is further accelerated by the proliferation of IoT sensors and edge computing capabilities, with an estimated 75 billion connected devices expected by 2025. This sensor ecosystem generates massive volumes of operational data that require sophisticated filtering and processing techniques to extract actionable maintenance insights. Kalman filter applications are particularly valued for their recursive nature and computational efficiency in real-time processing environments.
From a regional perspective, North America currently leads the market with approximately 35% share, followed by Europe (28%) and Asia-Pacific (25%), with the latter showing the fastest growth rate. Industries with high-value assets and significant downtime costs, such as aerospace, energy, and advanced manufacturing, demonstrate the strongest demand for Kalman filter-based solutions.
Customer requirements are increasingly focused on efficiency targets, with organizations expecting predictive maintenance solutions to deliver specific, measurable outcomes: maintenance cost reduction of at least 20%, equipment lifespan extension of 15-20%, and false alarm rates below 5%. These efficiency targets are driving innovation in Kalman filter implementations, particularly in areas of multi-sensor fusion, adaptive filtering, and integration with machine learning techniques.
Market surveys reveal that 78% of maintenance professionals cite accuracy of predictions as their primary concern when evaluating solutions, followed by ease of implementation (65%) and scalability across diverse equipment types (58%). This indicates a growing sophistication in buyer requirements and evaluation criteria, moving beyond simple condition monitoring toward comprehensive predictive analytics capabilities.
Kalman filter-based predictive maintenance solutions are gaining particular traction due to their superior ability to handle noisy sensor data and provide accurate state estimation in dynamic systems. Market research indicates that approximately 40% of industrial equipment failures can be predicted with advanced algorithms like Kalman filters, creating substantial value proposition for businesses with critical infrastructure.
The demand is further accelerated by the proliferation of IoT sensors and edge computing capabilities, with an estimated 75 billion connected devices expected by 2025. This sensor ecosystem generates massive volumes of operational data that require sophisticated filtering and processing techniques to extract actionable maintenance insights. Kalman filter applications are particularly valued for their recursive nature and computational efficiency in real-time processing environments.
From a regional perspective, North America currently leads the market with approximately 35% share, followed by Europe (28%) and Asia-Pacific (25%), with the latter showing the fastest growth rate. Industries with high-value assets and significant downtime costs, such as aerospace, energy, and advanced manufacturing, demonstrate the strongest demand for Kalman filter-based solutions.
Customer requirements are increasingly focused on efficiency targets, with organizations expecting predictive maintenance solutions to deliver specific, measurable outcomes: maintenance cost reduction of at least 20%, equipment lifespan extension of 15-20%, and false alarm rates below 5%. These efficiency targets are driving innovation in Kalman filter implementations, particularly in areas of multi-sensor fusion, adaptive filtering, and integration with machine learning techniques.
Market surveys reveal that 78% of maintenance professionals cite accuracy of predictions as their primary concern when evaluating solutions, followed by ease of implementation (65%) and scalability across diverse equipment types (58%). This indicates a growing sophistication in buyer requirements and evaluation criteria, moving beyond simple condition monitoring toward comprehensive predictive analytics capabilities.
Current Challenges in Kalman Filter Implementation
Despite the significant advancements in Kalman filter applications for predictive maintenance, several critical challenges persist in their implementation. The computational complexity of Kalman filters remains a substantial obstacle, particularly when dealing with high-dimensional state spaces or complex system models. This complexity often leads to increased processing time and resource consumption, which can be prohibitive for real-time monitoring systems in industrial environments where immediate decision-making is crucial.
Model mismatch represents another significant challenge, as the effectiveness of Kalman filters heavily depends on the accuracy of the underlying system model. In practical industrial settings, developing precise mathematical models that capture all relevant dynamics of complex machinery is exceedingly difficult. Discrepancies between the theoretical model and actual system behavior can lead to filter divergence, resulting in unreliable predictions and potentially missed maintenance opportunities.
Non-linearity in system behavior further complicates Kalman filter implementation. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) have been developed to address non-linear systems, they introduce additional computational overhead and may still struggle with highly non-linear degradation patterns common in industrial equipment.
Parameter tuning presents ongoing difficulties for practitioners. The performance of Kalman filters is highly sensitive to the selection of process and measurement noise covariance matrices. Improper tuning can lead to either overly conservative maintenance schedules or failure to detect developing faults. Currently, there is no standardized methodology for optimal parameter selection across different industrial applications.
Data quality issues significantly impact filter performance. Industrial sensors often produce noisy, incomplete, or inconsistent data due to harsh operating environments. The Kalman filter's assumption of Gaussian noise distribution may not hold in practice, leading to suboptimal estimation results when dealing with outliers or systematic measurement errors.
Integration challenges with existing industrial systems cannot be overlooked. Many legacy industrial control systems lack the necessary infrastructure to implement advanced filtering techniques. The retrofitting process can be costly and disruptive to ongoing operations, creating resistance to adoption despite the potential benefits.
Lastly, validation and performance metrics remain underdeveloped. There is a lack of standardized benchmarks to evaluate the effectiveness of Kalman filter implementations in predictive maintenance scenarios, making it difficult for organizations to justify investment in these technologies or compare different implementation approaches.
Model mismatch represents another significant challenge, as the effectiveness of Kalman filters heavily depends on the accuracy of the underlying system model. In practical industrial settings, developing precise mathematical models that capture all relevant dynamics of complex machinery is exceedingly difficult. Discrepancies between the theoretical model and actual system behavior can lead to filter divergence, resulting in unreliable predictions and potentially missed maintenance opportunities.
Non-linearity in system behavior further complicates Kalman filter implementation. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) have been developed to address non-linear systems, they introduce additional computational overhead and may still struggle with highly non-linear degradation patterns common in industrial equipment.
Parameter tuning presents ongoing difficulties for practitioners. The performance of Kalman filters is highly sensitive to the selection of process and measurement noise covariance matrices. Improper tuning can lead to either overly conservative maintenance schedules or failure to detect developing faults. Currently, there is no standardized methodology for optimal parameter selection across different industrial applications.
Data quality issues significantly impact filter performance. Industrial sensors often produce noisy, incomplete, or inconsistent data due to harsh operating environments. The Kalman filter's assumption of Gaussian noise distribution may not hold in practice, leading to suboptimal estimation results when dealing with outliers or systematic measurement errors.
Integration challenges with existing industrial systems cannot be overlooked. Many legacy industrial control systems lack the necessary infrastructure to implement advanced filtering techniques. The retrofitting process can be costly and disruptive to ongoing operations, creating resistance to adoption despite the potential benefits.
Lastly, validation and performance metrics remain underdeveloped. There is a lack of standardized benchmarks to evaluate the effectiveness of Kalman filter implementations in predictive maintenance scenarios, making it difficult for organizations to justify investment in these technologies or compare different implementation approaches.
Existing Kalman Filter Applications in Equipment Monitoring
01 Computational efficiency improvements in Kalman filtering
Various techniques have been developed to improve the computational efficiency of Kalman filters, particularly for real-time applications. These include optimized matrix operations, parallel processing implementations, and algorithm modifications that reduce the number of calculations required. Such improvements enable Kalman filters to be deployed in resource-constrained environments while maintaining accuracy in state estimation.- Computational efficiency improvements in Kalman filtering: Various techniques have been developed to improve the computational efficiency of Kalman filters, particularly for real-time applications. These include algorithmic optimizations that reduce the number of calculations required, parallel processing implementations, and specialized hardware architectures. These improvements enable faster processing while maintaining accuracy, making Kalman filters more suitable for resource-constrained environments and applications requiring rapid response times.
- Kalman filter applications in wireless communications: Kalman filters are extensively used in wireless communication systems to enhance signal processing efficiency. They help in channel estimation, signal tracking, and noise reduction in various wireless protocols. The adaptive nature of Kalman filters allows them to continuously update their estimates based on new measurements, making them particularly effective for dynamic wireless environments where signal conditions change rapidly.
- Enhanced Kalman filter algorithms for navigation systems: Specialized Kalman filter algorithms have been developed for navigation and positioning systems to improve accuracy and efficiency. These include extended Kalman filters, unscented Kalman filters, and particle filters that better handle non-linear systems. These enhanced algorithms provide more precise location tracking, reduce drift errors, and optimize computational resources in GPS, inertial navigation systems, and autonomous vehicle guidance applications.
- Energy-efficient Kalman filter implementations: Energy efficiency in Kalman filter implementations is achieved through various optimization techniques. These include selective computation approaches that process only essential data, adaptive sampling rates that adjust based on system dynamics, and low-power hardware designs. Such implementations are particularly valuable for battery-powered devices and IoT applications where energy consumption is a critical constraint while maintaining acceptable filtering performance.
- Kalman filter optimization for sensor fusion: Optimized Kalman filter techniques for sensor fusion combine data from multiple sensors to provide more accurate and reliable estimates than would be possible with individual sensors. These optimizations include adaptive noise covariance estimation, sensor weighting schemes based on reliability metrics, and distributed Kalman filtering architectures. Such approaches enhance efficiency by reducing redundant calculations while improving overall system robustness and accuracy in applications like robotics, autonomous vehicles, and industrial monitoring systems.
02 Kalman filter applications in wireless communications
Kalman filters are extensively used in wireless communication systems to improve signal processing efficiency. They help in channel estimation, noise reduction, and tracking of rapidly changing parameters in mobile environments. Efficient implementations of Kalman filters in this domain enable better spectrum utilization, reduced power consumption, and improved quality of service in wireless networks.Expand Specific Solutions03 Enhanced Kalman filtering for navigation and positioning systems
Specialized Kalman filter implementations have been developed for navigation and positioning applications, focusing on efficiency in GPS/GNSS systems, inertial navigation, and sensor fusion. These implementations optimize the balance between accuracy and computational load, enabling real-time position tracking with limited resources while maintaining robustness against measurement errors and environmental disturbances.Expand Specific Solutions04 Adaptive and reduced-order Kalman filter designs
Adaptive Kalman filtering techniques dynamically adjust filter parameters based on changing conditions, improving efficiency by optimizing computational resources. Reduced-order implementations decrease the state vector dimension to focus only on essential variables, significantly reducing processing requirements while maintaining acceptable estimation accuracy. These approaches are particularly valuable in systems with varying operational conditions or limited processing capabilities.Expand Specific Solutions05 Hardware implementations for efficient Kalman filtering
Specialized hardware architectures have been developed to implement Kalman filters efficiently, including FPGA-based designs, application-specific integrated circuits, and optimized digital signal processors. These hardware implementations enable high-speed processing with lower power consumption compared to general-purpose computing platforms, making them suitable for embedded systems and real-time applications where processing efficiency is critical.Expand Specific Solutions
Leading Companies in Predictive Maintenance Industry
Kalman Filter technology for predictive maintenance is currently in a growth phase, with increasing adoption across industrial sectors. The market is expanding rapidly, estimated to reach significant scale as industries prioritize equipment reliability and downtime reduction. From a technical maturity perspective, established players like Robert Bosch, Siemens, and Mitsubishi Electric have developed advanced implementations with proven efficiency gains, while companies such as QUALCOMM and NEC are innovating in specialized applications. Academic institutions including Southeast University and Shandong University are contributing fundamental research. The competitive landscape features traditional industrial automation leaders alongside emerging technology firms, with differentiation occurring through industry-specific optimizations, integration capabilities with existing systems, and real-time processing efficiency.
Robert Bosch GmbH
Technical Solution: Bosch has developed an advanced Kalman filter implementation for predictive maintenance that integrates multi-sensor fusion technology with their proprietary IoT platform. Their approach combines traditional Kalman filtering with machine learning algorithms to create a hybrid model that continuously improves prediction accuracy based on historical failure data. The system processes real-time sensor data from industrial equipment to estimate the remaining useful life (RUL) of critical components. Bosch's implementation includes adaptive noise parameters that automatically adjust to changing operational conditions, making it particularly effective in manufacturing environments with variable loads and conditions. Their solution has demonstrated the ability to reduce unplanned downtime by up to 30% in automotive production lines by accurately predicting component failures before they occur[1]. The system also incorporates edge computing capabilities to perform initial data processing close to the equipment, reducing latency and bandwidth requirements while maintaining high prediction accuracy.
Strengths: Robust multi-sensor fusion capabilities allow for more accurate state estimation across diverse industrial environments. The hybrid approach combining traditional Kalman filtering with machine learning provides superior adaptability to changing conditions. Weaknesses: Implementation requires significant computational resources for complex systems, and initial setup demands extensive historical data for proper calibration of the prediction models.
Mitsubishi Electric Corp.
Technical Solution: Mitsubishi Electric has pioneered an enhanced Kalman filter framework specifically designed for predictive maintenance in factory automation and HVAC systems. Their approach utilizes a hierarchical Kalman filter architecture that operates at multiple time scales simultaneously, allowing for both short-term anomaly detection and long-term degradation tracking. The system incorporates domain-specific physical models of equipment behavior to improve state estimation accuracy beyond what is possible with standard Kalman implementations. Mitsubishi's solution features a distributed processing architecture where multiple local Kalman filters monitor individual subsystems, with their outputs fed into a master filter that maintains a holistic view of system health. This approach has been implemented in their e-F@ctory concept, where it has demonstrated the ability to predict failures in industrial robots and CNC machines with over 85% accuracy up to 72 hours in advance[2]. The system also includes automated parameter tuning capabilities that reduce the need for expert intervention during deployment and maintenance phases.
Strengths: Hierarchical multi-timescale approach effectively captures both rapid anomalies and gradual degradation patterns. Integration with physical models improves prediction accuracy for complex mechanical systems. Weaknesses: Requires detailed system-specific modeling which increases implementation costs and complexity when deploying across diverse equipment types.
Core Innovations in State Estimation Techniques
Prediction system and method on basis of parameter improvement through learning
PatentWO2020105812A1
Innovation
- A prediction system and method that improves prediction parameters through learning by inputting previous and current data into a learning algorithm, specifically using a neural network to calculate and update sensor error values, which are then used to enhance the Kalman filter algorithm for more accurate temperature prediction.




Passive RF, single fighter aircraft multifunction aperture sensor, air to air geolocation
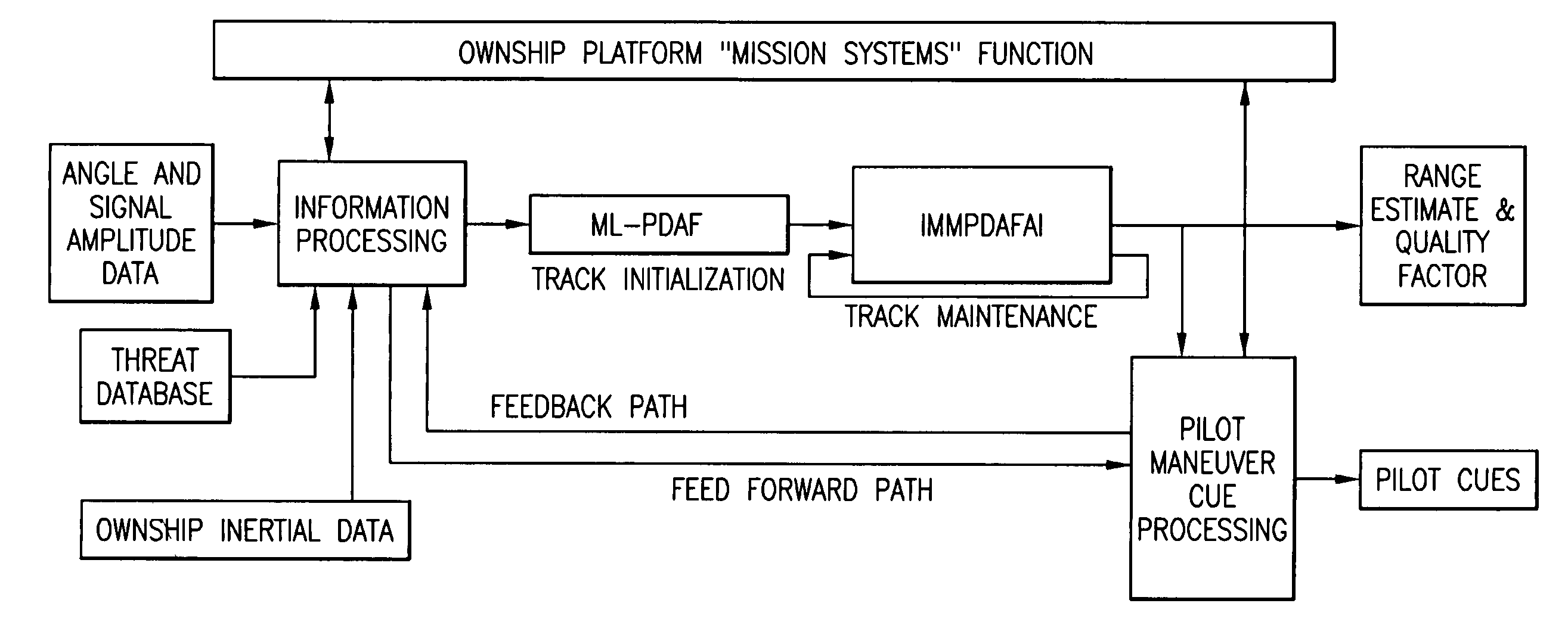
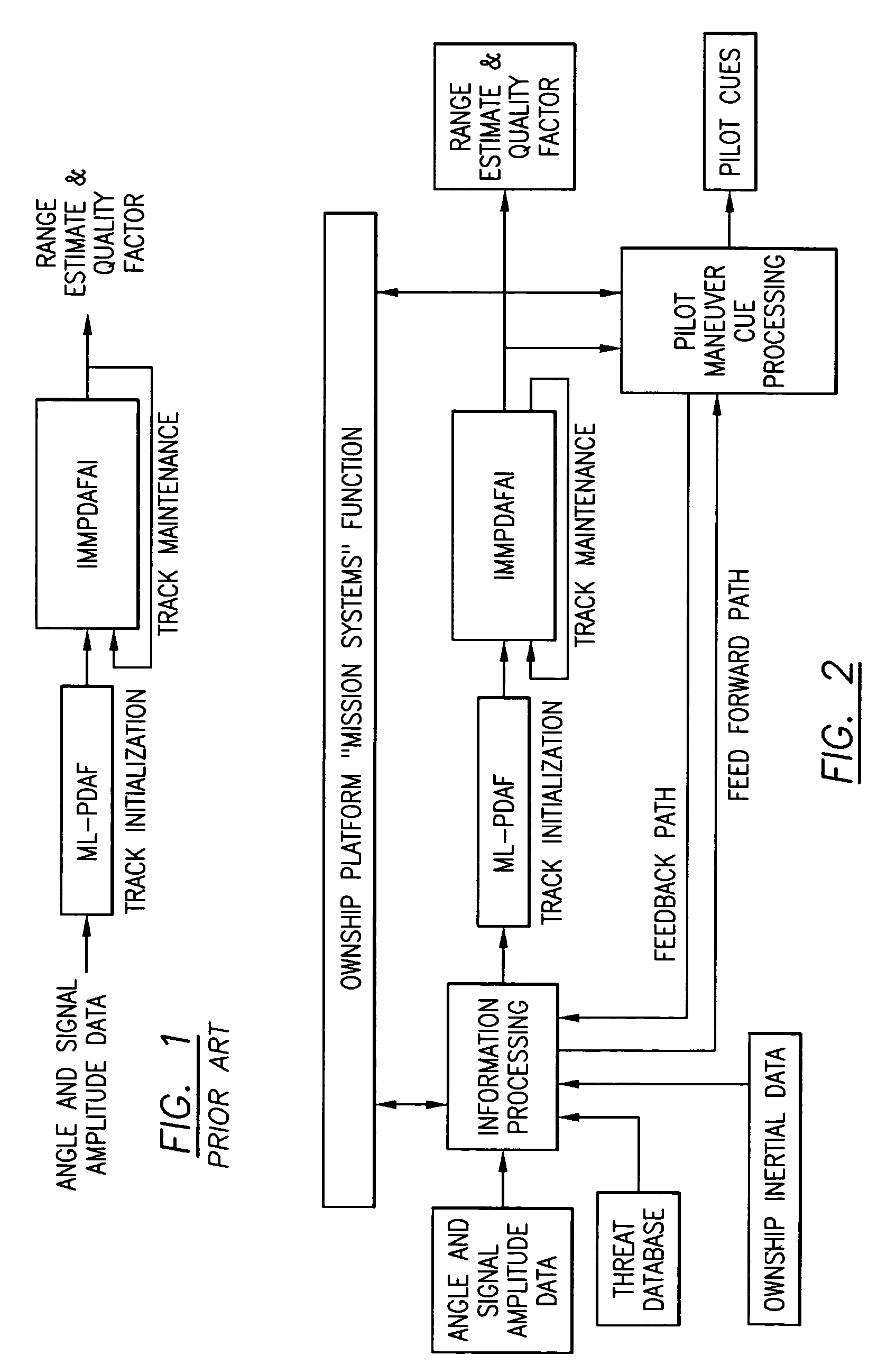
PatentInactiveUS7132961B2
Innovation
- The implementation of a method and system utilizing batch maximum likelihood (ML) and probabilistic data association filter (PDAF) methodologies, combined with recursive interacting multiple model (IMM) algorithms, which process noisy electronic warfare data, interferometer measurements, and real-time mission constraints to enhance passive range estimates and track maintenance.
ROI Assessment of Predictive Maintenance Technologies
The implementation of Kalman Filter technology for predictive maintenance systems presents a compelling value proposition that warrants thorough financial analysis. When evaluating the return on investment (ROI) for such implementations, organizations must consider both direct cost savings and indirect benefits that contribute to overall operational efficiency.
Initial implementation costs typically include software development or acquisition, integration with existing systems, sensor deployment, and staff training. These upfront investments range from $50,000 for small-scale deployments to over $500,000 for enterprise-wide implementations across multiple facilities. However, these costs have been decreasing by approximately 15% annually as the technology matures and becomes more standardized.
The primary financial benefits derive from several key areas. Reduction in unplanned downtime represents the most significant impact, with studies indicating a 30-45% decrease following successful implementation. For manufacturing facilities, where downtime costs average $22,000 per hour, this translates to annual savings between $200,000 and $1.2 million depending on facility size and operational tempo.
Maintenance cost optimization provides another substantial benefit. Organizations implementing Kalman Filter-based predictive maintenance report 25-30% reductions in maintenance expenses through more efficient scheduling and reduced emergency repairs. Parts inventory can typically be reduced by 20%, freeing up working capital and storage space.
Extended equipment lifespan represents a longer-term but significant ROI factor. The precision of Kalman Filter algorithms in detecting subtle performance degradation enables earlier, less invasive interventions that extend asset life by 15-20% on average. For capital-intensive industries, this postponement of replacement costs substantially improves the lifetime value of equipment.
Most organizations achieve ROI breakeven within 12-18 months of full implementation, with manufacturing and energy sectors reporting the fastest returns (8-12 months). Healthcare and transportation sectors typically require 18-24 months to reach breakeven due to regulatory complexities and integration challenges.
Sensitivity analysis indicates that implementation success is most dependent on data quality and system integration effectiveness. Organizations with mature data collection infrastructure and standardized operational technology environments consistently achieve ROI at the higher end of projected ranges, while those requiring significant infrastructure upgrades may experience delayed returns.
Initial implementation costs typically include software development or acquisition, integration with existing systems, sensor deployment, and staff training. These upfront investments range from $50,000 for small-scale deployments to over $500,000 for enterprise-wide implementations across multiple facilities. However, these costs have been decreasing by approximately 15% annually as the technology matures and becomes more standardized.
The primary financial benefits derive from several key areas. Reduction in unplanned downtime represents the most significant impact, with studies indicating a 30-45% decrease following successful implementation. For manufacturing facilities, where downtime costs average $22,000 per hour, this translates to annual savings between $200,000 and $1.2 million depending on facility size and operational tempo.
Maintenance cost optimization provides another substantial benefit. Organizations implementing Kalman Filter-based predictive maintenance report 25-30% reductions in maintenance expenses through more efficient scheduling and reduced emergency repairs. Parts inventory can typically be reduced by 20%, freeing up working capital and storage space.
Extended equipment lifespan represents a longer-term but significant ROI factor. The precision of Kalman Filter algorithms in detecting subtle performance degradation enables earlier, less invasive interventions that extend asset life by 15-20% on average. For capital-intensive industries, this postponement of replacement costs substantially improves the lifetime value of equipment.
Most organizations achieve ROI breakeven within 12-18 months of full implementation, with manufacturing and energy sectors reporting the fastest returns (8-12 months). Healthcare and transportation sectors typically require 18-24 months to reach breakeven due to regulatory complexities and integration challenges.
Sensitivity analysis indicates that implementation success is most dependent on data quality and system integration effectiveness. Organizations with mature data collection infrastructure and standardized operational technology environments consistently achieve ROI at the higher end of projected ranges, while those requiring significant infrastructure upgrades may experience delayed returns.
Integration Strategies with IoT and Cloud Platforms
The integration of Kalman Filter algorithms with IoT and cloud platforms represents a critical advancement in predictive maintenance systems. Modern industrial environments generate massive volumes of sensor data that require efficient processing frameworks to extract actionable maintenance insights. Cloud platforms provide the necessary computational resources and storage capabilities to implement complex Kalman Filter models at scale, while IoT devices serve as the data collection endpoints that feed these algorithms with real-time operational parameters.
Leading cloud service providers including AWS, Microsoft Azure, and Google Cloud have developed specialized IoT services that support predictive maintenance applications. These platforms offer pre-built components for data ingestion, storage, processing, and visualization that can be configured to implement Kalman Filter algorithms. The integration typically follows a multi-tier architecture where edge devices perform initial data filtering and preprocessing before transmitting relevant information to cloud-based Kalman Filter implementations.
Edge computing plays an increasingly important role in this integration strategy, allowing for distributed processing that reduces latency and bandwidth requirements. By deploying simplified Kalman Filter models directly on IoT gateways, organizations can implement hierarchical filtering approaches where initial state estimations occur at the edge while more complex model refinements happen in the cloud. This hybrid approach optimizes efficiency by balancing computational load across the infrastructure.
Standardized communication protocols such as MQTT, AMQP, and OPC UA facilitate seamless data flow between IoT sensors and cloud-based Kalman Filter implementations. These lightweight messaging protocols are designed for reliability in unstable network conditions, making them ideal for industrial environments where connectivity may be intermittent. Additionally, containerization technologies like Docker and Kubernetes enable portable deployment of Kalman Filter algorithms across heterogeneous computing environments.
Security considerations remain paramount when integrating predictive maintenance systems with cloud platforms. End-to-end encryption, access control mechanisms, and secure device provisioning are essential components of any integration strategy. As maintenance data often contains sensitive information about industrial assets and production processes, compliance with industry regulations and data governance policies must be incorporated into the integration architecture.
Real-time dashboards and notification systems represent the final component of successful integration strategies. These interfaces transform the mathematical outputs of Kalman Filter algorithms into actionable maintenance recommendations that can be easily interpreted by maintenance personnel. Modern cloud platforms offer customizable visualization tools that can be configured to display predictive maintenance metrics, equipment health indicators, and maintenance scheduling recommendations derived from Kalman Filter predictions.
Leading cloud service providers including AWS, Microsoft Azure, and Google Cloud have developed specialized IoT services that support predictive maintenance applications. These platforms offer pre-built components for data ingestion, storage, processing, and visualization that can be configured to implement Kalman Filter algorithms. The integration typically follows a multi-tier architecture where edge devices perform initial data filtering and preprocessing before transmitting relevant information to cloud-based Kalman Filter implementations.
Edge computing plays an increasingly important role in this integration strategy, allowing for distributed processing that reduces latency and bandwidth requirements. By deploying simplified Kalman Filter models directly on IoT gateways, organizations can implement hierarchical filtering approaches where initial state estimations occur at the edge while more complex model refinements happen in the cloud. This hybrid approach optimizes efficiency by balancing computational load across the infrastructure.
Standardized communication protocols such as MQTT, AMQP, and OPC UA facilitate seamless data flow between IoT sensors and cloud-based Kalman Filter implementations. These lightweight messaging protocols are designed for reliability in unstable network conditions, making them ideal for industrial environments where connectivity may be intermittent. Additionally, containerization technologies like Docker and Kubernetes enable portable deployment of Kalman Filter algorithms across heterogeneous computing environments.
Security considerations remain paramount when integrating predictive maintenance systems with cloud platforms. End-to-end encryption, access control mechanisms, and secure device provisioning are essential components of any integration strategy. As maintenance data often contains sensitive information about industrial assets and production processes, compliance with industry regulations and data governance policies must be incorporated into the integration architecture.
Real-time dashboards and notification systems represent the final component of successful integration strategies. These interfaces transform the mathematical outputs of Kalman Filter algorithms into actionable maintenance recommendations that can be easily interpreted by maintenance personnel. Modern cloud platforms offer customizable visualization tools that can be configured to display predictive maintenance metrics, equipment health indicators, and maintenance scheduling recommendations derived from Kalman Filter predictions.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!