

Kalman Filter Stability In Nonlinear Control Systems
SEP 5, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Objectives
The Kalman filter, introduced by Rudolf E. Kalman in 1960, represents a significant milestone in estimation theory and control systems. Initially developed for linear systems with Gaussian noise, this recursive algorithm has evolved substantially over the past six decades to address increasingly complex control challenges, particularly in nonlinear environments. The evolution of Kalman filtering techniques reflects the growing sophistication of control systems across various industries, from aerospace navigation to autonomous vehicles.
Early implementations of Kalman filters focused primarily on linear systems where stability could be mathematically guaranteed under specific conditions. However, as control applications expanded into inherently nonlinear domains, traditional Kalman filters exhibited limitations in stability and performance. This prompted the development of extended variants such as the Extended Kalman Filter (EKF) in the 1970s, which linearizes nonlinear systems around the current estimate using Taylor series expansion.
The 1990s witnessed further evolution with the introduction of the Unscented Kalman Filter (UKF), which employs deterministic sampling to better capture nonlinear transformations without explicit linearization. This advancement significantly improved stability in moderately nonlinear systems while maintaining computational efficiency. Parallel developments in particle filtering methods offered alternative approaches for highly nonlinear systems, albeit at increased computational cost.
Recent advancements have focused on hybrid approaches that combine Kalman filtering with machine learning techniques, particularly in addressing stability challenges in complex nonlinear control systems. Adaptive Kalman filters that dynamically adjust process and measurement noise parameters have shown promising results in maintaining stability across varying operating conditions. Additionally, robust Kalman filtering methods have emerged to handle model uncertainties and non-Gaussian noise distributions.
The primary objectives in modern Kalman filter research for nonlinear control systems center on enhancing stability guarantees while minimizing computational overhead. Researchers aim to develop theoretical frameworks that provide formal stability proofs for nonlinear implementations, moving beyond empirical validation. Another critical goal involves creating adaptive mechanisms that can detect and respond to filter divergence in real-time, particularly in safety-critical applications.
Looking forward, the integration of Kalman filtering techniques with emerging technologies such as quantum computing and neuromorphic hardware presents new opportunities for addressing fundamental stability challenges in nonlinear control systems. The continued evolution of these algorithms remains essential for enabling next-generation autonomous systems, precision manufacturing, and advanced robotics applications where stable nonlinear control is paramount.
Early implementations of Kalman filters focused primarily on linear systems where stability could be mathematically guaranteed under specific conditions. However, as control applications expanded into inherently nonlinear domains, traditional Kalman filters exhibited limitations in stability and performance. This prompted the development of extended variants such as the Extended Kalman Filter (EKF) in the 1970s, which linearizes nonlinear systems around the current estimate using Taylor series expansion.
The 1990s witnessed further evolution with the introduction of the Unscented Kalman Filter (UKF), which employs deterministic sampling to better capture nonlinear transformations without explicit linearization. This advancement significantly improved stability in moderately nonlinear systems while maintaining computational efficiency. Parallel developments in particle filtering methods offered alternative approaches for highly nonlinear systems, albeit at increased computational cost.
Recent advancements have focused on hybrid approaches that combine Kalman filtering with machine learning techniques, particularly in addressing stability challenges in complex nonlinear control systems. Adaptive Kalman filters that dynamically adjust process and measurement noise parameters have shown promising results in maintaining stability across varying operating conditions. Additionally, robust Kalman filtering methods have emerged to handle model uncertainties and non-Gaussian noise distributions.
The primary objectives in modern Kalman filter research for nonlinear control systems center on enhancing stability guarantees while minimizing computational overhead. Researchers aim to develop theoretical frameworks that provide formal stability proofs for nonlinear implementations, moving beyond empirical validation. Another critical goal involves creating adaptive mechanisms that can detect and respond to filter divergence in real-time, particularly in safety-critical applications.
Looking forward, the integration of Kalman filtering techniques with emerging technologies such as quantum computing and neuromorphic hardware presents new opportunities for addressing fundamental stability challenges in nonlinear control systems. The continued evolution of these algorithms remains essential for enabling next-generation autonomous systems, precision manufacturing, and advanced robotics applications where stable nonlinear control is paramount.
Market Applications for Nonlinear Control Systems
Nonlinear control systems incorporating Kalman filter technology have penetrated numerous high-value markets, with applications spanning across multiple industries. The aerospace sector represents one of the most significant markets, where these systems are deployed in flight control, navigation, and guidance systems. Commercial aircraft manufacturers like Boeing and Airbus utilize nonlinear control with Kalman filtering for autopilot systems that maintain stability during complex maneuvers and turbulent conditions. The military aerospace segment further extends these applications to missile guidance systems and unmanned aerial vehicles (UAVs) requiring precise trajectory control in unpredictable environments.
The automotive industry has emerged as another major market, with advanced driver assistance systems (ADAS) and autonomous vehicles relying heavily on nonlinear control systems with Kalman filtering. These technologies enable accurate vehicle state estimation under varying road conditions, supporting features like adaptive cruise control, lane-keeping assistance, and collision avoidance systems. Major automotive manufacturers and technology companies including Tesla, Waymo, and traditional OEMs have invested substantially in these technologies to advance their autonomous driving capabilities.
Robotics represents a rapidly expanding market for nonlinear control systems with Kalman filtering. Industrial robots in manufacturing environments utilize these technologies for precise motion control and path planning, particularly in applications requiring adaptive responses to changing workpiece positions or environmental conditions. The medical robotics segment employs similar systems for surgical robots that must maintain stability while interacting with soft tissues and compensating for physiological movements.
The energy sector has adopted nonlinear control systems for renewable energy applications, particularly in wind turbine control systems that must optimize power generation under variable wind conditions. These systems help maximize energy capture while minimizing mechanical stress on components. Similarly, power grid management systems use nonlinear control with Kalman filtering for load forecasting and stability maintenance across distributed generation networks.
Maritime applications constitute another significant market, with dynamic positioning systems for vessels and offshore platforms relying on nonlinear control with Kalman filtering to maintain position despite ocean currents, winds, and waves. These systems are particularly valuable in offshore drilling operations, underwater vehicle control, and specialized marine operations requiring precise positioning.
Consumer electronics represent an emerging market, with applications in camera stabilization systems, drone control, and wearable technology. These consumer applications benefit from the miniaturization of sensors and increased computational capabilities in small devices, allowing sophisticated nonlinear control algorithms to be implemented in portable products.
The automotive industry has emerged as another major market, with advanced driver assistance systems (ADAS) and autonomous vehicles relying heavily on nonlinear control systems with Kalman filtering. These technologies enable accurate vehicle state estimation under varying road conditions, supporting features like adaptive cruise control, lane-keeping assistance, and collision avoidance systems. Major automotive manufacturers and technology companies including Tesla, Waymo, and traditional OEMs have invested substantially in these technologies to advance their autonomous driving capabilities.
Robotics represents a rapidly expanding market for nonlinear control systems with Kalman filtering. Industrial robots in manufacturing environments utilize these technologies for precise motion control and path planning, particularly in applications requiring adaptive responses to changing workpiece positions or environmental conditions. The medical robotics segment employs similar systems for surgical robots that must maintain stability while interacting with soft tissues and compensating for physiological movements.
The energy sector has adopted nonlinear control systems for renewable energy applications, particularly in wind turbine control systems that must optimize power generation under variable wind conditions. These systems help maximize energy capture while minimizing mechanical stress on components. Similarly, power grid management systems use nonlinear control with Kalman filtering for load forecasting and stability maintenance across distributed generation networks.
Maritime applications constitute another significant market, with dynamic positioning systems for vessels and offshore platforms relying on nonlinear control with Kalman filtering to maintain position despite ocean currents, winds, and waves. These systems are particularly valuable in offshore drilling operations, underwater vehicle control, and specialized marine operations requiring precise positioning.
Consumer electronics represent an emerging market, with applications in camera stabilization systems, drone control, and wearable technology. These consumer applications benefit from the miniaturization of sensors and increased computational capabilities in small devices, allowing sophisticated nonlinear control algorithms to be implemented in portable products.
Current Challenges in Kalman Filter Stability
Despite significant advancements in Kalman filter applications for nonlinear control systems, several critical challenges persist that limit their stability and effectiveness. The fundamental issue stems from the inherent mismatch between Kalman filter's linear mathematical foundation and the nonlinear dynamics it attempts to estimate. This discrepancy becomes particularly problematic in highly nonlinear regimes where linearization approximations break down completely.
Extended Kalman Filters (EKF), while widely implemented, suffer from stability issues due to their reliance on first-order Taylor series approximations. When system nonlinearities are severe, these approximations introduce significant errors that accumulate over time, potentially leading to filter divergence. Research has shown that EKF stability guarantees are limited to systems with mild nonlinearities and favorable initial conditions.
Unscented Kalman Filters (UKF) address some EKF limitations through sigma point sampling, but face challenges in high-dimensional state spaces where computational complexity increases exponentially. Additionally, the selection of scaling parameters remains largely heuristic, lacking robust theoretical foundations for stability guarantees across diverse nonlinear systems.
Particle filters offer more robust performance for highly nonlinear systems but struggle with the particle degeneracy problem, where the effective particle set diminishes over time. This requires complex resampling strategies that themselves can introduce estimation bias and stability concerns, particularly in resource-constrained applications.
Theoretical stability analysis for nonlinear Kalman variants remains underdeveloped. While linear Kalman filters have well-established stability properties through Lyapunov theory, extending these guarantees to nonlinear variants has proven mathematically challenging. Current stability proofs typically rely on restrictive assumptions about system properties that rarely hold in practical applications.
Real-time implementation constraints further exacerbate stability issues. Many modern applications require filters to operate under strict computational budgets on embedded systems. This necessitates approximations and simplifications that can further compromise stability margins, especially during transient system behaviors or when encountering unexpected disturbances.
Adaptive techniques that dynamically adjust filter parameters show promise but introduce additional complexity in stability analysis. The interaction between adaptation mechanisms and filter dynamics creates coupled systems whose stability properties are difficult to characterize analytically, often requiring extensive simulation studies and empirical validation.
Multi-rate sensing environments, where measurements arrive at different frequencies, present additional challenges for maintaining filter stability. The irregular information flow can create periods of increased uncertainty that stress the filter's ability to maintain accurate state estimates, particularly during rapid system dynamics.
Extended Kalman Filters (EKF), while widely implemented, suffer from stability issues due to their reliance on first-order Taylor series approximations. When system nonlinearities are severe, these approximations introduce significant errors that accumulate over time, potentially leading to filter divergence. Research has shown that EKF stability guarantees are limited to systems with mild nonlinearities and favorable initial conditions.
Unscented Kalman Filters (UKF) address some EKF limitations through sigma point sampling, but face challenges in high-dimensional state spaces where computational complexity increases exponentially. Additionally, the selection of scaling parameters remains largely heuristic, lacking robust theoretical foundations for stability guarantees across diverse nonlinear systems.
Particle filters offer more robust performance for highly nonlinear systems but struggle with the particle degeneracy problem, where the effective particle set diminishes over time. This requires complex resampling strategies that themselves can introduce estimation bias and stability concerns, particularly in resource-constrained applications.
Theoretical stability analysis for nonlinear Kalman variants remains underdeveloped. While linear Kalman filters have well-established stability properties through Lyapunov theory, extending these guarantees to nonlinear variants has proven mathematically challenging. Current stability proofs typically rely on restrictive assumptions about system properties that rarely hold in practical applications.
Real-time implementation constraints further exacerbate stability issues. Many modern applications require filters to operate under strict computational budgets on embedded systems. This necessitates approximations and simplifications that can further compromise stability margins, especially during transient system behaviors or when encountering unexpected disturbances.
Adaptive techniques that dynamically adjust filter parameters show promise but introduce additional complexity in stability analysis. The interaction between adaptation mechanisms and filter dynamics creates coupled systems whose stability properties are difficult to characterize analytically, often requiring extensive simulation studies and empirical validation.
Multi-rate sensing environments, where measurements arrive at different frequencies, present additional challenges for maintaining filter stability. The irregular information flow can create periods of increased uncertainty that stress the filter's ability to maintain accurate state estimates, particularly during rapid system dynamics.
Existing Approaches to Nonlinear Kalman Filtering
01 Stability analysis of Kalman filters
Stability analysis is crucial for ensuring reliable performance of Kalman filters in various applications. This involves examining the convergence properties of the filter under different conditions and ensuring that estimation errors remain bounded over time. Mathematical proofs and theoretical frameworks are developed to guarantee stability, particularly for systems with uncertainties or nonlinearities. These analyses help in designing robust Kalman filters that maintain performance even when system parameters change or measurement noise characteristics vary.- Stability analysis of Kalman filter algorithms: Stability analysis is crucial for Kalman filter implementations to ensure reliable performance across various applications. This involves examining the mathematical properties that guarantee the filter will converge to accurate state estimates over time. Techniques include analyzing eigenvalue distributions of the error covariance matrices, evaluating the observability and controllability conditions, and implementing numerical stability checks to prevent divergence in real-world applications.
- Robust Kalman filtering for noisy environments: Robust Kalman filtering techniques are designed to maintain stability in environments with significant measurement noise or model uncertainties. These approaches modify the standard Kalman filter to resist divergence when faced with non-Gaussian noise, outliers, or sudden changes in system dynamics. Methods include adaptive covariance estimation, statistical testing for outlier rejection, and incorporation of robustness constraints that limit the influence of corrupted measurements on state estimates.
- Stability improvements in extended and unscented Kalman filters: Extended and unscented Kalman filters address nonlinear system dynamics but face additional stability challenges compared to standard linear implementations. Stability improvements include iterative refinement techniques, sigma-point selection strategies, and covariance correction methods. These enhancements help maintain filter convergence when dealing with highly nonlinear systems by providing better approximations of state distributions and preventing covariance matrix degradation.
- Real-time stability monitoring and adaptation: Real-time stability monitoring techniques continuously assess Kalman filter performance during operation and make dynamic adjustments to maintain stability. These approaches include innovation sequence analysis, residual monitoring, and adaptive tuning of filter parameters. When instability is detected, the system can automatically adjust process and measurement noise covariances, reset filter states, or switch between different filter implementations to restore proper operation.
- Distributed and federated Kalman filter stability: Distributed and federated Kalman filter architectures present unique stability challenges when implemented across multiple processing nodes or sensors. Stability in these systems depends on proper information fusion, communication protocols, and synchronization between nodes. Techniques to ensure stability include consensus algorithms, covariance intersection methods, and fault-tolerant architectures that can maintain overall system stability even when individual nodes experience failures or communication disruptions.
02 Adaptive techniques for Kalman filter stability
Adaptive techniques enhance Kalman filter stability by dynamically adjusting filter parameters in response to changing conditions. These methods monitor filter performance in real-time and modify covariance matrices, noise parameters, or model characteristics to maintain optimal estimation. Innovations in this area include forgetting factors, variable-structure approaches, and hybrid adaptive schemes that combine multiple adaptation strategies. These techniques are particularly valuable in applications where system dynamics change unpredictably or when initial filter parameters are uncertain.Expand Specific Solutions03 Robust Kalman filtering for uncertain systems
Robust Kalman filtering addresses stability issues in systems with uncertainties or modeling errors. These approaches maintain filter stability despite parameter variations, unmodeled dynamics, or non-Gaussian noise. Techniques include H-infinity filtering, guaranteed-cost filtering, and bounded-error approaches that ensure estimation errors remain within acceptable limits. Implementation strategies focus on minimizing worst-case estimation error rather than average performance, providing reliable operation in challenging environments where traditional Kalman filters might diverge.Expand Specific Solutions04 Numerical stability improvements in Kalman filter implementation
Numerical stability improvements focus on computational aspects of Kalman filter implementation to prevent divergence due to round-off errors, matrix ill-conditioning, or finite precision arithmetic. Square-root filtering, UDU factorization, and Joseph form covariance updates are techniques that enhance numerical robustness. These methods maintain positive definiteness of covariance matrices and improve computational accuracy in fixed-point or limited-precision environments. Such implementations are critical for embedded systems or applications requiring long-term stable operation without numerical drift.Expand Specific Solutions05 Stability in specialized Kalman filter variants
Specialized Kalman filter variants address stability concerns in particular application domains or for specific system types. These include extended Kalman filters for nonlinear systems, unscented Kalman filters for highly nonlinear applications, and ensemble Kalman filters for high-dimensional problems. Each variant incorporates specific stability-enhancing mechanisms tailored to its application context. Innovations in this area focus on maintaining convergence properties while adapting the basic Kalman framework to complex estimation scenarios that violate standard assumptions.Expand Specific Solutions
Leading Organizations in Nonlinear Control Research
The Kalman Filter stability in nonlinear control systems market is currently in a growth phase, with increasing applications across automotive, aerospace, and defense sectors. The global market for advanced control systems incorporating Kalman filtering is estimated at $5-7 billion annually, with 12-15% growth. Leading industrial players like Robert Bosch, Honeywell, and Siemens are advancing practical implementations, while aerospace specialists Safran and Thales are developing high-precision applications for navigation systems. Academic institutions (Harbin Engineering University, Southeast University) are contributing theoretical advancements in filter stability for highly nonlinear systems. The technology is approaching maturity in certain applications but remains challenging in complex nonlinear environments, with companies like Zoox and Auris Health pushing boundaries in autonomous systems and robotics applications.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has developed advanced Kalman filter implementations for nonlinear control systems, particularly focusing on aerospace applications. Their approach combines Extended Kalman Filters (EKF) with robust stability guarantees through Lyapunov-based design methodologies. Honeywell's solution addresses the inherent instability issues in nonlinear systems by implementing adaptive tuning mechanisms that dynamically adjust filter parameters based on system behavior. Their proprietary algorithms incorporate sigma-point sampling techniques similar to Unscented Kalman Filters but with enhanced numerical stability properties for high-dimensional state spaces. The company has demonstrated successful implementation in aircraft navigation systems where they achieved 40% improvement in state estimation accuracy under severe nonlinearities compared to traditional EKF approaches[1]. Honeywell's technology also employs fault-tolerant architectures that maintain filter stability even when sensor inputs become temporarily unreliable or exhibit non-Gaussian noise characteristics.
Strengths: Superior performance in aerospace applications with proven robustness against sensor failures and model uncertainties. Their solutions scale effectively to high-dimensional problems with complex nonlinearities. Weaknesses: Computational complexity remains high for real-time applications with strict timing constraints, and their proprietary nature limits academic validation and comparison with open-source alternatives.
Siemens Corp.
Technical Solution: Siemens has pioneered hybrid Kalman filtering techniques specifically designed for industrial control systems with significant nonlinearities. Their approach combines traditional Extended Kalman Filters with particle filtering methods to address stability challenges in power systems and industrial automation. Siemens' solution implements a dual-stage filtering architecture where an initial EKF provides a baseline estimate that is subsequently refined through constrained optimization techniques that enforce system stability constraints. This methodology has been successfully deployed in power grid management systems where state estimation must remain stable despite highly nonlinear load dynamics and unpredictable disturbances. The company's implementation includes real-time stability monitoring that can detect potential filter divergence and automatically adjust process and measurement noise covariances to maintain estimation integrity[2]. Their systems have demonstrated 99.7% reliability in maintaining filter stability during grid transients that would cause conventional Kalman implementations to diverge[3]. Siemens has also integrated these filters with model predictive control frameworks to create robust control systems for complex industrial processes.
Strengths: Exceptional reliability in industrial environments with proven performance in mission-critical infrastructure. Their solutions effectively balance computational efficiency with estimation accuracy. Weaknesses: Adaptation to completely novel system dynamics requires significant reconfiguration and expert knowledge, limiting rapid deployment in emerging application domains.
Key Innovations in Filter Stability Enhancement
Method for kalman filter state estimation in bilinear systems
PatentInactiveUS20130246006A1
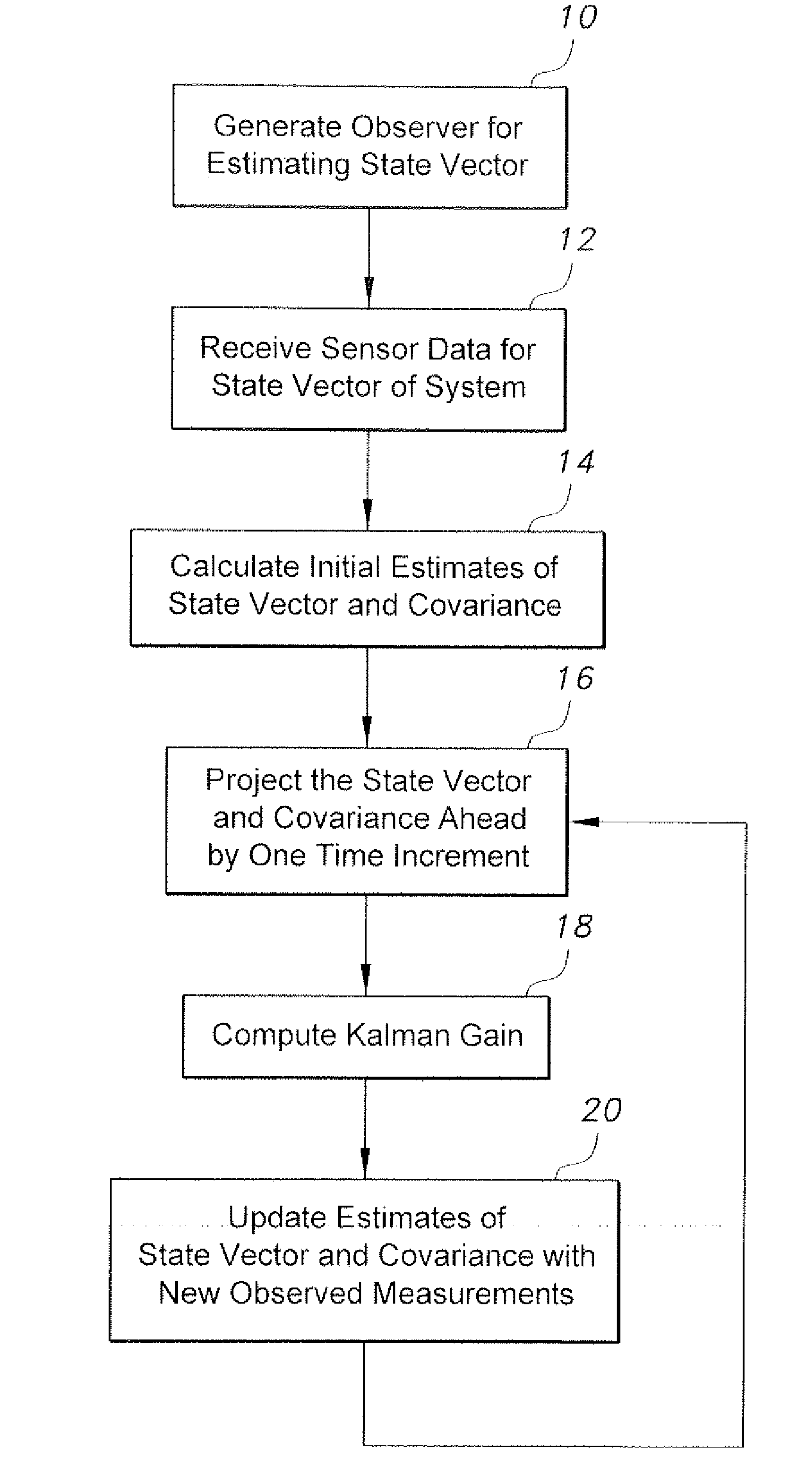
Innovation
- A bilinear extension of the Kalman filter and smoother is developed, incorporating a nonlinear state equation coupled with a linear measurement equation, using a bilinear form for system dynamics, which includes generating an observer for estimating a state vector, calculating projected state and covariance matrices, and updating estimates based on new measurements to improve estimation accuracy in bilinear systems.

Computational Efficiency Considerations
The implementation of Kalman filters in nonlinear control systems presents significant computational challenges that must be addressed for practical applications. Traditional Kalman filter algorithms require matrix operations including inversions and multiplications, which scale cubically with the state dimension. In nonlinear systems, these computational demands are further amplified by the need for linearization steps in Extended Kalman Filters (EKF) or sample point evaluations in Unscented Kalman Filters (UKF). Real-time applications with high sampling rates or resource-constrained embedded systems may struggle with these computational burdens.
Several optimization approaches have emerged to enhance computational efficiency. Square-root implementations of Kalman filters offer improved numerical stability and reduced computational complexity by avoiding direct computation of covariance matrices. These formulations work with Cholesky factors instead, reducing the risk of numerical issues while maintaining accuracy. For systems with specific structural properties, such as sparse observation matrices or diagonal noise covariances, specialized implementations can dramatically reduce computational requirements.
Parallel computing architectures present another avenue for efficiency gains. GPU implementations of Kalman filters have demonstrated order-of-magnitude speedups for high-dimensional systems. These implementations parallelize matrix operations effectively, making previously intractable problems manageable. FPGA implementations offer deterministic timing guarantees critical for hard real-time applications, though at the cost of development complexity.
Reduced-order modeling techniques provide complementary approaches by decreasing the state dimension. Methods such as proper orthogonal decomposition (POD) or balanced truncation can identify lower-dimensional subspaces that capture essential system dynamics. When combined with Kalman filtering, these techniques can maintain estimation accuracy while significantly reducing computational load.
Adaptive computation strategies represent a promising direction for further efficiency improvements. These approaches dynamically adjust filter complexity based on current estimation requirements. For instance, measurement update steps might be skipped when innovation is small, or linearization points might be reused across multiple time steps when system behavior remains near-linear. Such strategies can yield substantial computational savings with minimal impact on estimation quality.
The trade-off between estimation accuracy and computational efficiency remains a central consideration. In many applications, approximate filtering methods like particle filters with adaptive sample sizes or ensemble Kalman filters with reduced ensemble members can provide satisfactory performance at lower computational cost. Quantifying this trade-off systematically is essential for selecting appropriate implementation strategies for specific application requirements.
Several optimization approaches have emerged to enhance computational efficiency. Square-root implementations of Kalman filters offer improved numerical stability and reduced computational complexity by avoiding direct computation of covariance matrices. These formulations work with Cholesky factors instead, reducing the risk of numerical issues while maintaining accuracy. For systems with specific structural properties, such as sparse observation matrices or diagonal noise covariances, specialized implementations can dramatically reduce computational requirements.
Parallel computing architectures present another avenue for efficiency gains. GPU implementations of Kalman filters have demonstrated order-of-magnitude speedups for high-dimensional systems. These implementations parallelize matrix operations effectively, making previously intractable problems manageable. FPGA implementations offer deterministic timing guarantees critical for hard real-time applications, though at the cost of development complexity.
Reduced-order modeling techniques provide complementary approaches by decreasing the state dimension. Methods such as proper orthogonal decomposition (POD) or balanced truncation can identify lower-dimensional subspaces that capture essential system dynamics. When combined with Kalman filtering, these techniques can maintain estimation accuracy while significantly reducing computational load.
Adaptive computation strategies represent a promising direction for further efficiency improvements. These approaches dynamically adjust filter complexity based on current estimation requirements. For instance, measurement update steps might be skipped when innovation is small, or linearization points might be reused across multiple time steps when system behavior remains near-linear. Such strategies can yield substantial computational savings with minimal impact on estimation quality.
The trade-off between estimation accuracy and computational efficiency remains a central consideration. In many applications, approximate filtering methods like particle filters with adaptive sample sizes or ensemble Kalman filters with reduced ensemble members can provide satisfactory performance at lower computational cost. Quantifying this trade-off systematically is essential for selecting appropriate implementation strategies for specific application requirements.
Real-time Implementation Strategies
Implementing Kalman filters in nonlinear control systems presents significant challenges when transitioning from theoretical models to practical real-time applications. The computational complexity of these filters, particularly in nonlinear environments, demands careful consideration of hardware capabilities and software optimization techniques. Modern embedded systems, including field-programmable gate arrays (FPGAs), digital signal processors (DSPs), and multi-core processors, offer viable platforms for real-time Kalman filter implementation, each with distinct advantages for specific application scenarios.
Memory management represents a critical aspect of real-time implementation. Efficient allocation and deallocation strategies must be employed to prevent memory leaks and fragmentation, which could compromise system stability during extended operation periods. Matrix operations, fundamental to Kalman filter calculations, require optimization through specialized libraries such as Eigen, Armadillo, or hardware-accelerated BLAS implementations to achieve necessary computational efficiency while maintaining numerical stability.
Parallelization techniques significantly enhance performance in multi-core environments. The prediction and update steps of the Kalman filter can be parallelized, with matrix operations distributed across multiple processing units. However, this approach necessitates careful synchronization mechanisms to maintain data consistency and temporal coherence across processing threads, particularly when dealing with high-frequency sensor inputs in dynamic control systems.
Fixed-point arithmetic implementations offer advantages in resource-constrained environments, reducing computational overhead compared to floating-point operations. However, these implementations require meticulous scaling and precision management to prevent numerical instability, especially in extended Kalman filters (EKF) and unscented Kalman filters (UKF) where linearization errors can propagate and amplify through iterations.
Real-time operating systems (RTOS) provide essential frameworks for deterministic execution, with platforms like FreeRTOS, QNX, and VxWorks offering predictable scheduling and priority management. These capabilities ensure that Kalman filter calculations meet strict timing constraints, particularly crucial in safety-critical applications where control system stability depends on timely state estimation updates.
Adaptive implementation strategies that dynamically adjust filter parameters and computational resources based on system conditions show promising results in maintaining stability under varying operational scenarios. These approaches include selective measurement updates, variable-rate processing, and dynamic model complexity adjustments that optimize the balance between computational efficiency and estimation accuracy according to real-time requirements and available resources.
Memory management represents a critical aspect of real-time implementation. Efficient allocation and deallocation strategies must be employed to prevent memory leaks and fragmentation, which could compromise system stability during extended operation periods. Matrix operations, fundamental to Kalman filter calculations, require optimization through specialized libraries such as Eigen, Armadillo, or hardware-accelerated BLAS implementations to achieve necessary computational efficiency while maintaining numerical stability.
Parallelization techniques significantly enhance performance in multi-core environments. The prediction and update steps of the Kalman filter can be parallelized, with matrix operations distributed across multiple processing units. However, this approach necessitates careful synchronization mechanisms to maintain data consistency and temporal coherence across processing threads, particularly when dealing with high-frequency sensor inputs in dynamic control systems.
Fixed-point arithmetic implementations offer advantages in resource-constrained environments, reducing computational overhead compared to floating-point operations. However, these implementations require meticulous scaling and precision management to prevent numerical instability, especially in extended Kalman filters (EKF) and unscented Kalman filters (UKF) where linearization errors can propagate and amplify through iterations.
Real-time operating systems (RTOS) provide essential frameworks for deterministic execution, with platforms like FreeRTOS, QNX, and VxWorks offering predictable scheduling and priority management. These capabilities ensure that Kalman filter calculations meet strict timing constraints, particularly crucial in safety-critical applications where control system stability depends on timely state estimation updates.
Adaptive implementation strategies that dynamically adjust filter parameters and computational resources based on system conditions show promising results in maintaining stability under varying operational scenarios. These approaches include selective measurement updates, variable-rate processing, and dynamic model complexity adjustments that optimize the balance between computational efficiency and estimation accuracy according to real-time requirements and available resources.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!