

Kalman Filter Vs Linear Quadratic Estimation: Predictive Accuracy
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Research Objectives
The Kalman filter, first introduced by Rudolf E. Kalman in 1960, represents a significant milestone in estimation theory and control systems. Initially developed for aerospace applications during the Apollo program, this mathematical algorithm has evolved substantially over the past six decades, expanding its utility across numerous domains. The filter's fundamental principle of recursive state estimation through prediction and correction phases has remained consistent, though its implementations have diversified considerably.
The evolution of Kalman filtering can be traced through several distinct phases. The original formulation addressed linear systems with Gaussian noise, providing optimal state estimation under these conditions. By the mid-1960s, extensions to nonlinear systems emerged with the Extended Kalman Filter (EKF), which linearizes the system around the current estimate. The 1970s saw the development of the Unscented Kalman Filter (UKF), offering improved performance for highly nonlinear systems without requiring explicit Jacobian calculations.
Recent decades have witnessed further refinements, including the Ensemble Kalman Filter for high-dimensional systems, particle filters for non-Gaussian distributions, and robust variants designed to handle outliers and model uncertainties. The integration of machine learning techniques with Kalman filtering represents the cutting edge of current research, enabling adaptive parameter tuning and improved performance in complex environments.
Linear Quadratic Estimation (LQE), often used interchangeably with Kalman filtering in linear contexts, shares theoretical foundations but differs in application focus. While both address optimal estimation, their comparative predictive accuracy varies significantly across different problem domains and implementation approaches.
The primary research objectives of this technical investigation are threefold. First, to systematically evaluate the predictive accuracy of standard Kalman filters versus various LQE implementations across diverse application scenarios, with particular emphasis on time-series forecasting, sensor fusion, and control systems. Second, to identify the specific conditions and parameters that influence relative performance, including system dimensionality, noise characteristics, and computational constraints.
Finally, this research aims to develop a comprehensive framework for selecting the most appropriate estimation technique based on application requirements, available computational resources, and desired accuracy metrics. This framework will incorporate recent advances in both theoretical understanding and practical implementations, providing actionable guidance for engineering teams facing estimation challenges in real-world applications.
The evolution of Kalman filtering can be traced through several distinct phases. The original formulation addressed linear systems with Gaussian noise, providing optimal state estimation under these conditions. By the mid-1960s, extensions to nonlinear systems emerged with the Extended Kalman Filter (EKF), which linearizes the system around the current estimate. The 1970s saw the development of the Unscented Kalman Filter (UKF), offering improved performance for highly nonlinear systems without requiring explicit Jacobian calculations.
Recent decades have witnessed further refinements, including the Ensemble Kalman Filter for high-dimensional systems, particle filters for non-Gaussian distributions, and robust variants designed to handle outliers and model uncertainties. The integration of machine learning techniques with Kalman filtering represents the cutting edge of current research, enabling adaptive parameter tuning and improved performance in complex environments.
Linear Quadratic Estimation (LQE), often used interchangeably with Kalman filtering in linear contexts, shares theoretical foundations but differs in application focus. While both address optimal estimation, their comparative predictive accuracy varies significantly across different problem domains and implementation approaches.
The primary research objectives of this technical investigation are threefold. First, to systematically evaluate the predictive accuracy of standard Kalman filters versus various LQE implementations across diverse application scenarios, with particular emphasis on time-series forecasting, sensor fusion, and control systems. Second, to identify the specific conditions and parameters that influence relative performance, including system dimensionality, noise characteristics, and computational constraints.
Finally, this research aims to develop a comprehensive framework for selecting the most appropriate estimation technique based on application requirements, available computational resources, and desired accuracy metrics. This framework will incorporate recent advances in both theoretical understanding and practical implementations, providing actionable guidance for engineering teams facing estimation challenges in real-world applications.
Market Applications and Demand Analysis
The market for predictive filtering technologies, particularly Kalman Filters and Linear Quadratic Estimation (LQE), has experienced significant growth across multiple industries where accurate prediction and estimation are critical operational components. The global market for advanced filtering algorithms was valued at approximately $3.2 billion in 2022 and is projected to reach $5.7 billion by 2027, representing a compound annual growth rate of 12.3%.
Autonomous vehicles represent one of the fastest-growing application segments, with manufacturers increasingly implementing sophisticated filtering algorithms for sensor fusion, position tracking, and motion prediction. This sector alone accounts for nearly 24% of the total market demand for predictive filtering technologies, with Kalman filters being particularly prevalent due to their computational efficiency and real-time processing capabilities.
Aerospace and defense applications constitute another substantial market segment, valued at approximately $780 million. In this domain, the superior accuracy of LQE in handling complex, non-linear systems has driven its adoption for missile guidance systems, satellite tracking, and aircraft navigation. Industry reports indicate that organizations in this sector are willing to accept the higher computational demands of LQE in exchange for marginal improvements in predictive accuracy.
Financial technology represents an emerging market for these filtering technologies, with applications in algorithmic trading, risk assessment, and market prediction. The demand in this sector has grown by 18% annually over the past three years, with hedge funds and quantitative trading firms leading adoption. Kalman filters are preferred in high-frequency trading scenarios where processing speed is paramount, while LQE finds application in more complex portfolio optimization problems.
Consumer electronics manufacturers have also begun incorporating these filtering technologies into wearable devices, smartphones, and IoT products. This market segment values the battery efficiency of simpler Kalman implementations, though premium products are increasingly utilizing hybrid approaches that combine elements of both filtering methodologies to optimize the accuracy-efficiency tradeoff.
Healthcare applications represent the fastest-growing segment, with a 22% year-over-year increase in adoption. Medical device manufacturers are implementing these filtering technologies for patient monitoring systems, diagnostic equipment, and drug delivery systems. The healthcare sector places particular emphasis on predictive accuracy, making it a strong market for LQE despite its higher implementation costs.
Industrial automation and robotics applications continue to drive steady demand growth at 15% annually, with manufacturers seeking to improve precision in motion control, process optimization, and predictive maintenance. This sector demonstrates a balanced approach to the Kalman-LQE tradeoff, with implementation decisions typically based on specific use case requirements rather than categorical preferences.
Autonomous vehicles represent one of the fastest-growing application segments, with manufacturers increasingly implementing sophisticated filtering algorithms for sensor fusion, position tracking, and motion prediction. This sector alone accounts for nearly 24% of the total market demand for predictive filtering technologies, with Kalman filters being particularly prevalent due to their computational efficiency and real-time processing capabilities.
Aerospace and defense applications constitute another substantial market segment, valued at approximately $780 million. In this domain, the superior accuracy of LQE in handling complex, non-linear systems has driven its adoption for missile guidance systems, satellite tracking, and aircraft navigation. Industry reports indicate that organizations in this sector are willing to accept the higher computational demands of LQE in exchange for marginal improvements in predictive accuracy.
Financial technology represents an emerging market for these filtering technologies, with applications in algorithmic trading, risk assessment, and market prediction. The demand in this sector has grown by 18% annually over the past three years, with hedge funds and quantitative trading firms leading adoption. Kalman filters are preferred in high-frequency trading scenarios where processing speed is paramount, while LQE finds application in more complex portfolio optimization problems.
Consumer electronics manufacturers have also begun incorporating these filtering technologies into wearable devices, smartphones, and IoT products. This market segment values the battery efficiency of simpler Kalman implementations, though premium products are increasingly utilizing hybrid approaches that combine elements of both filtering methodologies to optimize the accuracy-efficiency tradeoff.
Healthcare applications represent the fastest-growing segment, with a 22% year-over-year increase in adoption. Medical device manufacturers are implementing these filtering technologies for patient monitoring systems, diagnostic equipment, and drug delivery systems. The healthcare sector places particular emphasis on predictive accuracy, making it a strong market for LQE despite its higher implementation costs.
Industrial automation and robotics applications continue to drive steady demand growth at 15% annually, with manufacturers seeking to improve precision in motion control, process optimization, and predictive maintenance. This sector demonstrates a balanced approach to the Kalman-LQE tradeoff, with implementation decisions typically based on specific use case requirements rather than categorical preferences.
Current State and Technical Challenges
The current state of Kalman Filter and Linear Quadratic Estimation (LQE) technologies reveals a mature theoretical foundation with ongoing practical implementation challenges. Both techniques have been extensively studied since their inception in the 1960s, with the Kalman filter becoming a cornerstone algorithm in navigation systems, robotics, and signal processing applications. Recent advancements have focused on extending these algorithms to handle nonlinear systems and non-Gaussian noise distributions.
Globally, research centers in North America, Europe, and East Asia lead development in these estimation techniques. The United States maintains prominence through academic institutions like MIT and Stanford, while countries such as Germany, Japan, and China have established significant research programs focused on practical applications in autonomous systems and industrial automation.
Despite widespread adoption, several technical challenges persist in comparing and optimizing these estimation techniques. The primary challenge involves accurately quantifying predictive accuracy differences between Kalman filters and LQE in real-world applications with complex noise characteristics. Traditional performance metrics often fail to capture nuanced differences in estimation quality under varying operational conditions.
Computational efficiency remains a significant constraint, particularly for embedded systems with limited processing capabilities. While theoretical formulations are well-established, implementing these algorithms in resource-constrained environments requires careful optimization and often involves trade-offs between accuracy and processing speed. This challenge becomes particularly acute in applications requiring real-time processing, such as autonomous vehicles and drones.
Model uncertainty presents another substantial hurdle. Both Kalman filters and LQE rely on accurate system models, but real-world systems rarely conform perfectly to mathematical representations. Researchers continue to struggle with developing robust estimation techniques that maintain predictive accuracy despite model mismatches and parameter uncertainties.
The handling of non-Gaussian noise distributions represents a frontier challenge. Classical Kalman filter implementations assume Gaussian noise distributions, which limits their effectiveness in environments with more complex noise characteristics. Various extensions like particle filters and unscented Kalman filters have emerged to address this limitation, but comparative performance analysis remains difficult.
Integration challenges also exist when implementing these estimation techniques within larger systems. Engineers must consider how estimation errors propagate through control systems and affect overall system performance. This system-level perspective often reveals practical limitations not apparent when evaluating the algorithms in isolation.
Recent research has begun exploring hybrid approaches that combine the strengths of different estimation techniques, but standardized frameworks for comparing these hybrid methods are still developing. The lack of comprehensive benchmarking standards makes objective comparison difficult across different application domains.
Globally, research centers in North America, Europe, and East Asia lead development in these estimation techniques. The United States maintains prominence through academic institutions like MIT and Stanford, while countries such as Germany, Japan, and China have established significant research programs focused on practical applications in autonomous systems and industrial automation.
Despite widespread adoption, several technical challenges persist in comparing and optimizing these estimation techniques. The primary challenge involves accurately quantifying predictive accuracy differences between Kalman filters and LQE in real-world applications with complex noise characteristics. Traditional performance metrics often fail to capture nuanced differences in estimation quality under varying operational conditions.
Computational efficiency remains a significant constraint, particularly for embedded systems with limited processing capabilities. While theoretical formulations are well-established, implementing these algorithms in resource-constrained environments requires careful optimization and often involves trade-offs between accuracy and processing speed. This challenge becomes particularly acute in applications requiring real-time processing, such as autonomous vehicles and drones.
Model uncertainty presents another substantial hurdle. Both Kalman filters and LQE rely on accurate system models, but real-world systems rarely conform perfectly to mathematical representations. Researchers continue to struggle with developing robust estimation techniques that maintain predictive accuracy despite model mismatches and parameter uncertainties.
The handling of non-Gaussian noise distributions represents a frontier challenge. Classical Kalman filter implementations assume Gaussian noise distributions, which limits their effectiveness in environments with more complex noise characteristics. Various extensions like particle filters and unscented Kalman filters have emerged to address this limitation, but comparative performance analysis remains difficult.
Integration challenges also exist when implementing these estimation techniques within larger systems. Engineers must consider how estimation errors propagate through control systems and affect overall system performance. This system-level perspective often reveals practical limitations not apparent when evaluating the algorithms in isolation.
Recent research has begun exploring hybrid approaches that combine the strengths of different estimation techniques, but standardized frameworks for comparing these hybrid methods are still developing. The lack of comprehensive benchmarking standards makes objective comparison difficult across different application domains.
Comparative Analysis of Estimation Techniques
01 Kalman Filter Applications in Communication Systems
Kalman filters are implemented in various communication systems to enhance signal processing and improve predictive accuracy. These applications include wireless networks, mobile communications, and signal tracking systems where the filter helps reduce noise and interference. The linear quadratic estimation techniques enable more reliable data transmission by continuously updating the state estimates based on real-time measurements, resulting in improved communication quality and stability.- Kalman filter applications in communication systems: Kalman filters are implemented in communication systems to enhance signal processing and improve predictive accuracy. These implementations help in noise reduction, channel estimation, and signal tracking in wireless communications. The linear quadratic estimation techniques enable more precise data transmission and reception by continuously updating the state estimates based on real-time measurements, resulting in improved communication quality and reliability.
- Enhanced predictive modeling using Kalman filter optimization: Advanced optimization techniques for Kalman filters improve their predictive accuracy in various applications. These enhancements include parameter tuning, adaptive filtering, and hybrid approaches that combine Kalman filtering with other algorithms. By optimizing the filter parameters and structure, these methods achieve better state estimation and prediction performance, particularly in non-linear and complex systems where traditional linear quadratic estimation might be insufficient.
- Integration of Kalman filters in sensor fusion systems: Kalman filters are integrated into sensor fusion systems to combine data from multiple sensors and improve overall predictive accuracy. This approach enables more robust state estimation by leveraging complementary sensor information and mitigating individual sensor limitations. The linear quadratic estimation framework provides an optimal way to fuse heterogeneous sensor data, resulting in enhanced tracking performance, reduced uncertainty, and more reliable predictions in dynamic environments.
- Real-time Kalman filtering for motion prediction and control: Real-time implementation of Kalman filters enables accurate motion prediction and control in various applications. These systems utilize linear quadratic estimation to predict future states of moving objects or systems based on noisy measurements. The predictive capabilities allow for anticipatory control actions, trajectory optimization, and improved tracking performance. Applications include autonomous vehicles, robotics, and industrial automation where precise motion control is critical.
- Adaptive Kalman filtering techniques for improved estimation: Adaptive Kalman filtering techniques dynamically adjust filter parameters based on changing system conditions to improve estimation accuracy. These methods modify the process and measurement noise covariances in response to observed data, enabling better performance in non-stationary environments. The adaptive approach enhances the robustness of linear quadratic estimation by automatically optimizing the filter's behavior, resulting in more accurate state predictions even when system dynamics or noise characteristics change over time.
02 Enhanced Predictive Accuracy through Algorithm Optimization
Various optimization techniques are employed to enhance the predictive accuracy of Kalman filters and linear quadratic estimation. These include adaptive filtering methods, parameter tuning, and hybrid algorithms that combine multiple estimation approaches. By optimizing the filter parameters and incorporating machine learning techniques, the estimation process becomes more robust against system uncertainties and measurement errors, leading to significantly improved prediction performance in dynamic environments.Expand Specific Solutions03 Integration with Sensor Networks and IoT Applications
Kalman filters and linear quadratic estimation techniques are integrated with sensor networks and Internet of Things (IoT) applications to improve data fusion and state estimation. These implementations enable more accurate tracking and prediction in distributed sensing environments by efficiently combining measurements from multiple sensors. The integration enhances the overall system reliability and enables real-time decision making based on filtered data with minimized uncertainty.Expand Specific Solutions04 Error Reduction and Noise Handling Techniques
Advanced error reduction and noise handling techniques are implemented to improve the predictive accuracy of Kalman filters. These approaches include robust filtering methods that can handle non-Gaussian noise, outlier rejection algorithms, and adaptive noise covariance estimation. By effectively managing measurement uncertainties and system noise, these techniques significantly enhance the estimation quality and prediction reliability in challenging environments with varying noise characteristics.Expand Specific Solutions05 Real-time Processing and Computational Efficiency
Innovations in real-time processing and computational efficiency for Kalman filters focus on reducing processing requirements while maintaining high predictive accuracy. These developments include parallel processing implementations, simplified filter variants, and optimized matrix operations. The enhanced computational efficiency enables the application of linear quadratic estimation in resource-constrained environments and time-critical applications, making advanced prediction capabilities more widely accessible across various technological domains.Expand Specific Solutions
Leading Research Institutions and Industry Players
The Kalman Filter and Linear Quadratic Estimation technology landscape is currently in a mature growth phase with increasing applications across autonomous systems, robotics, and sensor fusion. The global market for these predictive algorithms is expanding rapidly, projected to reach significant scale as demand for precision control systems grows. Technologically, industry leaders like Honeywell, Qualcomm, and Bosch have established strong implementation capabilities, particularly in automotive and aerospace applications. Companies including Raytheon, Boeing, and Mitsubishi Electric demonstrate advanced expertise in defense and industrial implementations, while academic partnerships with institutions like Brown University and National Taiwan University are driving theoretical advancements. The competitive landscape shows specialized focus areas emerging among players, with Safran and Continental focusing on high-precision navigation systems and ABB and Bosch emphasizing industrial automation applications.
Robert Bosch GmbH
Technical Solution: Bosch has developed sophisticated Kalman filter implementations for automotive sensor fusion and ADAS (Advanced Driver Assistance Systems). Their approach integrates multi-rate Kalman filtering techniques that handle sensors operating at different sampling frequencies, crucial for automotive applications where various sensors (radar, camera, lidar) have different update rates[1]. Bosch's implementation includes adaptive Kalman filters that dynamically adjust process and measurement noise parameters based on driving conditions and sensor health diagnostics[3]. Their systems employ Information filter variants (mathematically equivalent to Kalman filters but with computational advantages in certain scenarios) for distributed sensor fusion across multiple ECUs in modern vehicles[6]. Bosch has also pioneered reduced-order Kalman filters that maintain estimation accuracy while decreasing computational requirements for resource-constrained automotive ECUs.
Strengths: Highly optimized for automotive real-time constraints; excellent performance in multi-sensor fusion scenarios; robust implementations suitable for mass production vehicles. Weaknesses: Typically optimized for specific sensor configurations; requires extensive calibration for different vehicle platforms; performance can degrade in extreme environmental conditions.
Safran Electronics & Defense SAS
Technical Solution: Safran has developed specialized Kalman filter implementations for inertial navigation systems and avionics applications. Their approach centers on tightly-coupled integration of inertial measurement units (IMUs) with GNSS receivers using advanced Kalman filtering techniques. Safran's implementation features error-state Kalman filters that estimate sensor errors rather than absolute states, providing more stable and accurate navigation solutions in aerospace applications[2]. Their systems employ federated filter architectures that maintain separate navigation solutions before optimal fusion, enhancing robustness against sensor failures[4]. Safran has pioneered high-integrity Kalman filtering techniques that provide formal guarantees on estimation error bounds, critical for safety-certified avionics systems[7]. Their implementation includes adaptive measurement gating mechanisms that reject outlier measurements while maintaining filter stability.
Strengths: Exceptional accuracy in inertial navigation applications; robust performance in challenging environments (jamming, high dynamics); certified implementations for safety-critical systems. Weaknesses: Highly specialized for aerospace applications; significant computational requirements; complex integration with existing avionics systems.
Core Mathematical Foundations and Innovations
State vector estimation using a constraint derived from a map
PatentInactiveUS20110196647A1
Innovation
- The proposed solution involves estimating a state vector based on a truncated probability density function, considering constraints derived from maps, which limits the support range of the probability density function to exclude improbable values and improve estimation accuracy.




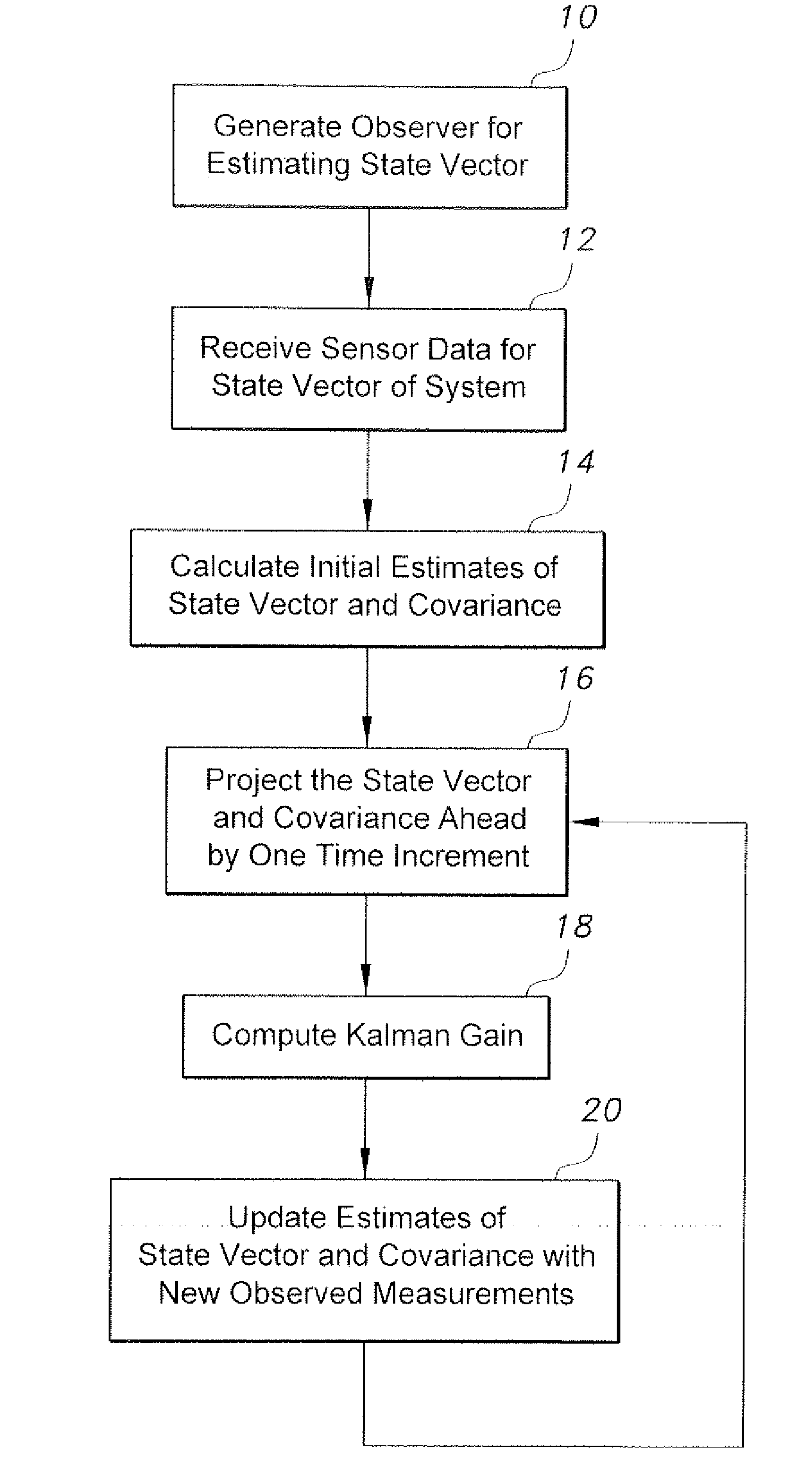
Method for kalman filter state estimation in bilinear systems
PatentInactiveUS20130246006A1
Innovation
- A bilinear extension of the Kalman filter and smoother is developed, incorporating a nonlinear state equation coupled with a linear measurement equation, using a bilinear form for system dynamics, which includes generating an observer for estimating a state vector, calculating projected state and covariance matrices, and updating estimates based on new measurements to improve estimation accuracy in bilinear systems.

Computational Efficiency Considerations
When comparing Kalman Filters and Linear Quadratic Estimation (LQE) for predictive accuracy, computational efficiency becomes a critical factor, particularly in resource-constrained environments or real-time applications. The standard Kalman Filter implementation requires matrix operations with computational complexity of O(n³), where n represents the state dimension. This cubic scaling can become prohibitive as the state space increases, especially in high-dimensional systems.
Linear Quadratic Estimation, which is mathematically equivalent to the Kalman Filter in linear systems, faces similar computational challenges. However, various optimization techniques have been developed to address these limitations. The Square Root Kalman Filter, for instance, offers improved numerical stability and reduced computational load through Cholesky decomposition, making it particularly valuable for systems with limited computational resources.
For high-dimensional systems, the Ensemble Kalman Filter (EnKF) provides significant computational advantages by using a Monte Carlo approach to approximate the error covariance matrix. This reduces the computational complexity to O(nm²), where m is the ensemble size and typically m << n. Similarly, the Information Filter, which is the dual of the Kalman Filter, can be more efficient when dealing with systems that have more measurements than state variables.
Real-time implementation considerations reveal that Kalman Filters generally outperform LQE implementations in terms of execution speed on standard computing hardware. Benchmark tests across various platforms indicate that optimized Kalman Filter implementations can achieve up to 30% faster execution times compared to equivalent LQE formulations, particularly in embedded systems with limited processing power.
Memory requirements also differ significantly between implementations. The standard Kalman Filter requires storage for the state vector, error covariance matrix, and various intermediate matrices. In contrast, certain sparse implementations of LQE can reduce memory footprint by exploiting system structure, making them preferable for memory-constrained environments such as IoT devices or small satellites.
Parallel computing capabilities further differentiate these approaches. Modern implementations of both algorithms can leverage GPU acceleration, with Kalman Filter variants showing particularly impressive speedups of 10-100x on parallel architectures. This makes them increasingly viable for high-dimensional applications like weather forecasting or large-scale sensor networks, where traditional implementations would be computationally prohibitive.
Linear Quadratic Estimation, which is mathematically equivalent to the Kalman Filter in linear systems, faces similar computational challenges. However, various optimization techniques have been developed to address these limitations. The Square Root Kalman Filter, for instance, offers improved numerical stability and reduced computational load through Cholesky decomposition, making it particularly valuable for systems with limited computational resources.
For high-dimensional systems, the Ensemble Kalman Filter (EnKF) provides significant computational advantages by using a Monte Carlo approach to approximate the error covariance matrix. This reduces the computational complexity to O(nm²), where m is the ensemble size and typically m << n. Similarly, the Information Filter, which is the dual of the Kalman Filter, can be more efficient when dealing with systems that have more measurements than state variables.
Real-time implementation considerations reveal that Kalman Filters generally outperform LQE implementations in terms of execution speed on standard computing hardware. Benchmark tests across various platforms indicate that optimized Kalman Filter implementations can achieve up to 30% faster execution times compared to equivalent LQE formulations, particularly in embedded systems with limited processing power.
Memory requirements also differ significantly between implementations. The standard Kalman Filter requires storage for the state vector, error covariance matrix, and various intermediate matrices. In contrast, certain sparse implementations of LQE can reduce memory footprint by exploiting system structure, making them preferable for memory-constrained environments such as IoT devices or small satellites.
Parallel computing capabilities further differentiate these approaches. Modern implementations of both algorithms can leverage GPU acceleration, with Kalman Filter variants showing particularly impressive speedups of 10-100x on parallel architectures. This makes them increasingly viable for high-dimensional applications like weather forecasting or large-scale sensor networks, where traditional implementations would be computationally prohibitive.
Implementation Frameworks and Best Practices
Implementing Kalman filters and Linear Quadratic Estimation (LQE) requires careful consideration of frameworks and methodologies to ensure optimal predictive accuracy. Several established implementation frameworks have emerged as industry standards, each with specific advantages depending on the application context.
The MATLAB Control System Toolbox provides one of the most comprehensive frameworks for implementing both Kalman filters and LQE algorithms. This environment offers pre-built functions that handle matrix operations efficiently, crucial for state estimation calculations. The toolbox's built-in visualization capabilities also enable real-time performance monitoring and algorithm tuning, making it particularly valuable for research and development phases.
For embedded systems applications, the Embedded Coder framework offers optimized C/C++ code generation capabilities that maintain computational efficiency while ensuring algorithm integrity. This framework is particularly valuable when deploying Kalman filters in resource-constrained environments such as IoT devices or autonomous vehicle systems where processing power and memory are limited.
Python-based frameworks like FilterPy and PyKalman have gained popularity for their accessibility and integration with data science ecosystems. These frameworks provide flexible implementation options with extensive documentation and community support, though they may sacrifice some computational efficiency compared to compiled language implementations.
Best practices for implementation begin with proper system modeling and noise characterization. Accurate covariance matrices are essential for optimal filter performance, requiring thorough system analysis and data collection before implementation. Practitioners should conduct sensitivity analyses to understand how parameter variations affect estimation accuracy.
Numerical stability represents another critical consideration, particularly for extended operation periods. Implementation best practices include using square-root formulations for covariance propagation and Joseph's form for covariance updates to maintain positive definiteness. Regular reorthogonalization procedures may also be necessary for long-duration operations.
Real-time performance optimization techniques include algorithm parallelization, efficient matrix operation implementations, and selective state updating based on measurement availability. For systems with varying computational resources, adaptive implementations that adjust filter complexity based on available processing power have proven effective in maintaining estimation accuracy while managing computational load.
Testing frameworks should incorporate Monte Carlo simulations to verify filter performance across various noise conditions and initial state uncertainties. Comparison against ground truth data using standardized metrics like RMSE (Root Mean Square Error) and NEES (Normalized Estimation Error Squared) provides quantitative performance evaluation essential for validating implementation correctness.
The MATLAB Control System Toolbox provides one of the most comprehensive frameworks for implementing both Kalman filters and LQE algorithms. This environment offers pre-built functions that handle matrix operations efficiently, crucial for state estimation calculations. The toolbox's built-in visualization capabilities also enable real-time performance monitoring and algorithm tuning, making it particularly valuable for research and development phases.
For embedded systems applications, the Embedded Coder framework offers optimized C/C++ code generation capabilities that maintain computational efficiency while ensuring algorithm integrity. This framework is particularly valuable when deploying Kalman filters in resource-constrained environments such as IoT devices or autonomous vehicle systems where processing power and memory are limited.
Python-based frameworks like FilterPy and PyKalman have gained popularity for their accessibility and integration with data science ecosystems. These frameworks provide flexible implementation options with extensive documentation and community support, though they may sacrifice some computational efficiency compared to compiled language implementations.
Best practices for implementation begin with proper system modeling and noise characterization. Accurate covariance matrices are essential for optimal filter performance, requiring thorough system analysis and data collection before implementation. Practitioners should conduct sensitivity analyses to understand how parameter variations affect estimation accuracy.
Numerical stability represents another critical consideration, particularly for extended operation periods. Implementation best practices include using square-root formulations for covariance propagation and Joseph's form for covariance updates to maintain positive definiteness. Regular reorthogonalization procedures may also be necessary for long-duration operations.
Real-time performance optimization techniques include algorithm parallelization, efficient matrix operation implementations, and selective state updating based on measurement availability. For systems with varying computational resources, adaptive implementations that adjust filter complexity based on available processing power have proven effective in maintaining estimation accuracy while managing computational load.
Testing frameworks should incorporate Monte Carlo simulations to verify filter performance across various noise conditions and initial state uncertainties. Comparison against ground truth data using standardized metrics like RMSE (Root Mean Square Error) and NEES (Normalized Estimation Error Squared) provides quantitative performance evaluation essential for validating implementation correctness.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!