

Optimizing Kalman Filter For Intermittent Data Patterns
SEP 12, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Optimization Goals
The Kalman filter, first introduced by Rudolf E. Kalman in 1960, has evolved significantly over the past six decades to become a cornerstone algorithm in estimation theory and control systems. Initially developed for aerospace applications during the Apollo program, this recursive estimator has expanded its reach across numerous domains including navigation, robotics, economics, and signal processing. The evolution of Kalman filtering techniques represents a continuous adaptation to increasingly complex real-world scenarios and computational capabilities.
Traditional Kalman filters operate under the assumption of continuous, reliable data streams. However, modern applications frequently encounter intermittent data patterns—characterized by irregular sampling rates, missing observations, and communication dropouts. These challenges have driven the development of specialized variants such as the Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and more recently, adaptive filtering techniques designed specifically for non-uniform data reception.
The optimization goals for Kalman filters in intermittent data environments center around several critical dimensions. First, robustness against observation gaps must be enhanced to maintain estimation accuracy during periods of missing data. This requires sophisticated prediction mechanisms that can compensate for temporal inconsistencies in measurement updates. Second, computational efficiency remains paramount, particularly for resource-constrained systems where processing power and memory are limited.
Convergence speed represents another crucial optimization target. Systems facing intermittent data must rapidly recover accurate state estimates following periods of data absence. This necessitates advanced initialization techniques and adaptive gain scheduling algorithms that can dynamically adjust filter parameters based on data availability patterns. Additionally, uncertainty quantification becomes increasingly important, as intermittent observations introduce variable levels of confidence in state estimates.
Recent technological trends have further shaped optimization priorities. The proliferation of distributed sensor networks has created demand for decentralized Kalman filtering architectures capable of handling asynchronous data from multiple sources. Meanwhile, the integration with machine learning approaches has opened new avenues for hybrid models that can learn from historical intermittency patterns to improve future predictions.
The ultimate goal of these optimization efforts is to develop Kalman filtering frameworks that maintain optimal performance regardless of data reception patterns. This includes minimizing estimation error, reducing computational overhead, and providing reliable uncertainty bounds even under challenging observation conditions. As systems become increasingly complex and distributed, achieving these optimization goals becomes essential for applications ranging from autonomous vehicles to industrial process control.
Traditional Kalman filters operate under the assumption of continuous, reliable data streams. However, modern applications frequently encounter intermittent data patterns—characterized by irregular sampling rates, missing observations, and communication dropouts. These challenges have driven the development of specialized variants such as the Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and more recently, adaptive filtering techniques designed specifically for non-uniform data reception.
The optimization goals for Kalman filters in intermittent data environments center around several critical dimensions. First, robustness against observation gaps must be enhanced to maintain estimation accuracy during periods of missing data. This requires sophisticated prediction mechanisms that can compensate for temporal inconsistencies in measurement updates. Second, computational efficiency remains paramount, particularly for resource-constrained systems where processing power and memory are limited.
Convergence speed represents another crucial optimization target. Systems facing intermittent data must rapidly recover accurate state estimates following periods of data absence. This necessitates advanced initialization techniques and adaptive gain scheduling algorithms that can dynamically adjust filter parameters based on data availability patterns. Additionally, uncertainty quantification becomes increasingly important, as intermittent observations introduce variable levels of confidence in state estimates.
Recent technological trends have further shaped optimization priorities. The proliferation of distributed sensor networks has created demand for decentralized Kalman filtering architectures capable of handling asynchronous data from multiple sources. Meanwhile, the integration with machine learning approaches has opened new avenues for hybrid models that can learn from historical intermittency patterns to improve future predictions.
The ultimate goal of these optimization efforts is to develop Kalman filtering frameworks that maintain optimal performance regardless of data reception patterns. This includes minimizing estimation error, reducing computational overhead, and providing reliable uncertainty bounds even under challenging observation conditions. As systems become increasingly complex and distributed, achieving these optimization goals becomes essential for applications ranging from autonomous vehicles to industrial process control.
Market Applications for Intermittent Data Processing
Intermittent data processing technologies, particularly those utilizing optimized Kalman filters, have found significant applications across diverse market sectors. The automotive industry has emerged as a primary adopter, implementing these systems in advanced driver-assistance systems (ADAS) where sensor data may become temporarily unavailable due to environmental factors. Vehicle manufacturers leverage intermittent data processing to maintain reliable object tracking and collision avoidance capabilities even when radar or camera inputs experience momentary disruptions.
The healthcare sector represents another substantial market, with medical monitoring devices increasingly relying on optimized filtering techniques to handle discontinuous patient data. Remote patient monitoring systems must maintain accurate health assessments despite connectivity issues or sensor detachments. The global remote patient monitoring market, driven partly by these technologies, continues to expand as healthcare providers seek solutions that can function reliably with imperfect data streams.
Industrial IoT applications constitute a rapidly growing market segment for intermittent data processing. Manufacturing facilities deploy sensor networks that frequently encounter communication disruptions due to electromagnetic interference or physical obstructions. Optimized Kalman filtering enables predictive maintenance systems to function effectively despite these challenges, reducing costly downtime and extending equipment lifespan.
The aerospace and defense sectors have historically driven development in this field, with applications ranging from missile guidance systems to aircraft navigation. These mission-critical systems must maintain operational integrity even when sensor data becomes temporarily unavailable. The technology allows for continuous trajectory estimation and target tracking despite intermittent radar returns or communication blackouts.
Smart city infrastructure represents an emerging application area with substantial growth potential. Traffic management systems, environmental monitoring networks, and public safety applications all generate intermittent data streams that require sophisticated processing. Urban planners increasingly deploy these technologies to maintain operational continuity across distributed sensor networks that experience variable connectivity.
Financial technology applications have also begun adopting intermittent data processing techniques, particularly in high-frequency trading systems where microsecond gaps in market data can significantly impact algorithmic decision-making. Optimized filtering enables more robust trading strategies that can maintain performance despite inevitable data discontinuities.
The consumer electronics market has seen growing implementation in wearable devices and smart home systems. These consumer products must function reliably despite frequent connectivity issues or power-saving modes that create data gaps. The technology enables smoother user experiences by maintaining accurate state estimation despite the inherently intermittent nature of consumer-grade sensors and networks.
The healthcare sector represents another substantial market, with medical monitoring devices increasingly relying on optimized filtering techniques to handle discontinuous patient data. Remote patient monitoring systems must maintain accurate health assessments despite connectivity issues or sensor detachments. The global remote patient monitoring market, driven partly by these technologies, continues to expand as healthcare providers seek solutions that can function reliably with imperfect data streams.
Industrial IoT applications constitute a rapidly growing market segment for intermittent data processing. Manufacturing facilities deploy sensor networks that frequently encounter communication disruptions due to electromagnetic interference or physical obstructions. Optimized Kalman filtering enables predictive maintenance systems to function effectively despite these challenges, reducing costly downtime and extending equipment lifespan.
The aerospace and defense sectors have historically driven development in this field, with applications ranging from missile guidance systems to aircraft navigation. These mission-critical systems must maintain operational integrity even when sensor data becomes temporarily unavailable. The technology allows for continuous trajectory estimation and target tracking despite intermittent radar returns or communication blackouts.
Smart city infrastructure represents an emerging application area with substantial growth potential. Traffic management systems, environmental monitoring networks, and public safety applications all generate intermittent data streams that require sophisticated processing. Urban planners increasingly deploy these technologies to maintain operational continuity across distributed sensor networks that experience variable connectivity.
Financial technology applications have also begun adopting intermittent data processing techniques, particularly in high-frequency trading systems where microsecond gaps in market data can significantly impact algorithmic decision-making. Optimized filtering enables more robust trading strategies that can maintain performance despite inevitable data discontinuities.
The consumer electronics market has seen growing implementation in wearable devices and smart home systems. These consumer products must function reliably despite frequent connectivity issues or power-saving modes that create data gaps. The technology enables smoother user experiences by maintaining accurate state estimation despite the inherently intermittent nature of consumer-grade sensors and networks.
Technical Challenges in Kalman Filtering for Sparse Data
Kalman filtering for sparse or intermittent data presents several significant technical challenges that researchers and engineers must overcome. The fundamental issue stems from the filter's underlying assumption of continuous measurement availability, which is violated when data arrives sporadically or contains significant gaps.
The primary challenge lies in state estimation during measurement gaps. Traditional Kalman filters propagate state estimates and error covariances based on the system model during prediction steps, but without regular measurement updates, estimation errors accumulate exponentially. This error growth can lead to filter divergence, where estimates become increasingly unreliable and potentially unusable for decision-making processes.
Covariance matrix management presents another critical challenge. During extended periods without measurements, the error covariance matrix often grows unbounded, leading to numerical instability issues. Matrix conditioning problems frequently arise, particularly in high-dimensional systems, causing computational failures or producing physically impossible state estimates.
Measurement synchronization poses significant difficulties when data arrives asynchronously from multiple sensors or with variable time delays. The classical Kalman framework assumes measurements occur at regular intervals, making it ill-equipped to handle time-varying sampling rates or out-of-sequence measurements that characterize many real-world sparse data scenarios.
Nonlinear effects become more pronounced with sparse data. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) address nonlinearity to some extent, their performance deteriorates significantly with intermittent measurements, as linearization errors compound during extended prediction phases without corrective measurement updates.
Computational efficiency represents another major hurdle. Many proposed solutions for handling intermittent data involve complex mathematical operations that significantly increase computational load. This creates implementation challenges for resource-constrained systems like embedded devices or real-time applications where processing power and memory are limited.
Robustness against outliers becomes particularly problematic with sparse data. With fewer measurements available for validation and cross-checking, anomalous data points can disproportionately impact filter performance. Traditional outlier rejection techniques often fail when measurements are scarce, as distinguishing between genuine system dynamics and measurement anomalies becomes increasingly difficult.
Theoretical guarantees regarding filter stability and convergence, well-established for standard Kalman implementations, become tenuous with intermittent observations. Proving mathematical bounds on estimation error under arbitrary data dropout patterns remains an open research question, creating uncertainty about filter reliability in mission-critical applications.
The primary challenge lies in state estimation during measurement gaps. Traditional Kalman filters propagate state estimates and error covariances based on the system model during prediction steps, but without regular measurement updates, estimation errors accumulate exponentially. This error growth can lead to filter divergence, where estimates become increasingly unreliable and potentially unusable for decision-making processes.
Covariance matrix management presents another critical challenge. During extended periods without measurements, the error covariance matrix often grows unbounded, leading to numerical instability issues. Matrix conditioning problems frequently arise, particularly in high-dimensional systems, causing computational failures or producing physically impossible state estimates.
Measurement synchronization poses significant difficulties when data arrives asynchronously from multiple sensors or with variable time delays. The classical Kalman framework assumes measurements occur at regular intervals, making it ill-equipped to handle time-varying sampling rates or out-of-sequence measurements that characterize many real-world sparse data scenarios.
Nonlinear effects become more pronounced with sparse data. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) address nonlinearity to some extent, their performance deteriorates significantly with intermittent measurements, as linearization errors compound during extended prediction phases without corrective measurement updates.
Computational efficiency represents another major hurdle. Many proposed solutions for handling intermittent data involve complex mathematical operations that significantly increase computational load. This creates implementation challenges for resource-constrained systems like embedded devices or real-time applications where processing power and memory are limited.
Robustness against outliers becomes particularly problematic with sparse data. With fewer measurements available for validation and cross-checking, anomalous data points can disproportionately impact filter performance. Traditional outlier rejection techniques often fail when measurements are scarce, as distinguishing between genuine system dynamics and measurement anomalies becomes increasingly difficult.
Theoretical guarantees regarding filter stability and convergence, well-established for standard Kalman implementations, become tenuous with intermittent observations. Proving mathematical bounds on estimation error under arbitrary data dropout patterns remains an open research question, creating uncertainty about filter reliability in mission-critical applications.
Current Approaches to Intermittent Data Kalman Filtering
01 Kalman Filter for Navigation and Positioning Systems
Kalman filters are extensively used in navigation and positioning systems to optimize location accuracy by filtering noisy sensor data. These implementations combine data from multiple sensors such as GPS, inertial measurement units, and other positioning technologies to provide more accurate and reliable position estimates. The optimization techniques focus on reducing estimation errors and improving real-time tracking performance in dynamic environments.- Kalman filter applications in signal processing: Kalman filters are widely used in signal processing applications to optimize noisy data and improve signal quality. These implementations focus on enhancing signal-to-noise ratios, reducing interference, and providing more accurate estimations in real-time systems. The optimization techniques include adaptive filtering parameters and specialized algorithms for different signal types, enabling more efficient processing in telecommunications, audio processing, and wireless communications.
- Navigation and positioning system optimization: Kalman filters are implemented in navigation and positioning systems to optimize location tracking and movement prediction. These systems use Kalman filtering to fuse data from multiple sensors, compensate for measurement errors, and provide accurate position estimates even with incomplete or noisy data. Optimization techniques focus on reducing computational complexity while maintaining high accuracy for real-time applications in GPS systems, autonomous vehicles, and mobile device tracking.
- Financial modeling and prediction optimization: Kalman filters are applied to financial data analysis and prediction models to optimize investment strategies and risk assessment. These implementations focus on handling the non-stationary nature of financial time series data, adapting to market volatility, and providing more accurate forecasts. The optimization techniques include parameter tuning for specific market conditions and hybrid approaches combining Kalman filtering with other predictive algorithms.
- Distributed and parallel Kalman filter implementations: Distributed and parallel processing architectures for Kalman filters optimize performance in large-scale systems with multiple sensors or data sources. These implementations focus on reducing computational bottlenecks, enabling real-time processing across networked systems, and maintaining estimation accuracy while distributing the computational load. Optimization techniques include efficient data sharing protocols, reduced-order models, and specialized hardware acceleration.
- Adaptive and robust Kalman filter variants: Advanced variants of Kalman filters are designed to optimize performance under challenging conditions such as non-linear systems, non-Gaussian noise, or model uncertainties. These implementations include extended Kalman filters, unscented Kalman filters, and robust Kalman filtering techniques that adapt to changing system dynamics. Optimization focuses on improving convergence rates, handling outliers, and maintaining stability when system parameters are uncertain or time-varying.
02 Communication Systems and Signal Processing Optimization
Kalman filtering techniques are applied to optimize signal processing in communication systems. These implementations focus on channel estimation, noise reduction, and signal quality improvement. The optimized filters help in tracking time-varying channels, reducing interference, and enhancing overall communication system performance, particularly in wireless networks and mobile communications.Expand Specific Solutions03 Financial and Economic Data Analysis
Kalman filters are utilized for financial data analysis and economic forecasting. These implementations optimize the processing of time-series financial data, market trends, and economic indicators. The filters help in reducing noise in financial data, improving prediction accuracy, and supporting decision-making processes in trading algorithms and economic modeling.Expand Specific Solutions04 Sensor Fusion and Data Integration
Optimized Kalman filter implementations for sensor fusion combine data from multiple heterogeneous sensors to provide more accurate and reliable state estimates. These techniques focus on integrating different data sources, handling varying sampling rates, and managing sensors with different error characteristics. The optimization improves overall system robustness and performance in applications such as autonomous vehicles, robotics, and industrial monitoring.Expand Specific Solutions05 Adaptive and Extended Kalman Filter Variants
Advanced variants of Kalman filters, including adaptive and extended versions, are developed to handle non-linear systems and changing environments. These implementations dynamically adjust filter parameters based on observed data characteristics, improving performance in complex scenarios. The optimization techniques focus on reducing computational complexity while maintaining or enhancing estimation accuracy for real-time applications.Expand Specific Solutions
Leading Organizations in Advanced Filtering Algorithms
The Kalman Filter optimization for intermittent data patterns market is in a growth phase, with increasing applications across autonomous systems, IoT, and industrial monitoring. The market is projected to reach significant scale as industries adopt more sophisticated sensor fusion technologies. Technologically, defense contractors like Lockheed Martin, BAE Systems, and Honeywell lead with advanced implementations in mission-critical systems, while Bosch, Mitsubishi Electric, and Samsung are driving commercial applications. Research institutions such as Naval Research Laboratory and universities (Southeast, Brown) are advancing theoretical frameworks. The technology is maturing rapidly with specialized adaptations emerging for specific intermittent data challenges, though standardization remains fragmented across industry verticals.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has developed an advanced Kalman filter implementation specifically designed for intermittent data patterns in industrial control systems. Their approach incorporates a multi-rate estimation framework that dynamically adjusts to varying data arrival rates. The system employs predictive compensation mechanisms that maintain estimation accuracy during data dropouts by leveraging historical pattern recognition. Honeywell's solution includes adaptive measurement covariance adjustment that automatically tunes filter parameters based on data reliability metrics, enabling robust performance even with 40-60% packet loss rates. Their implementation is particularly effective in wireless sensor networks where communication reliability cannot be guaranteed. The technology has been successfully deployed in aerospace systems, building automation, and process control applications where intermittent sensor data is common due to harsh environments or power constraints.
Strengths: Exceptional robustness against data dropouts with proven performance in industrial environments; seamless integration with existing control systems; low computational overhead suitable for embedded systems. Weaknesses: Requires initial calibration period to establish baseline performance; may need industry-specific tuning for optimal performance; proprietary implementation limits academic validation.
BAE Systems Information & Electronic Sys Integration, Inc.
Technical Solution: BAE Systems has engineered a military-grade Kalman filtering solution for intermittent data scenarios in defense applications. Their approach implements a hybrid estimation framework combining traditional Kalman filtering with Bayesian inference to handle missing observations in target tracking applications. The system incorporates jump Markov models to account for sudden changes in target dynamics during periods of missing data. BAE's implementation features a multi-hypothesis tracking architecture that maintains several possible state estimates simultaneously when data becomes intermittent, selecting the most probable trajectory when observations resume. This approach has demonstrated superior performance in radar tracking applications where target data can be intermittently obscured or jammed, maintaining tracking accuracy with up to 70% missing data points. The technology has been integrated into naval defense systems and battlefield awareness platforms where reliable tracking must be maintained despite electronic countermeasures.
Strengths: Exceptional performance in high-stakes defense applications; robust against deliberate jamming and interference; maintains tracking through extended periods of missing data. Weaknesses: Computationally intensive compared to standard implementations; requires specialized hardware for real-time operation; high implementation complexity increases integration challenges.
Key Innovations in Robust State Estimation
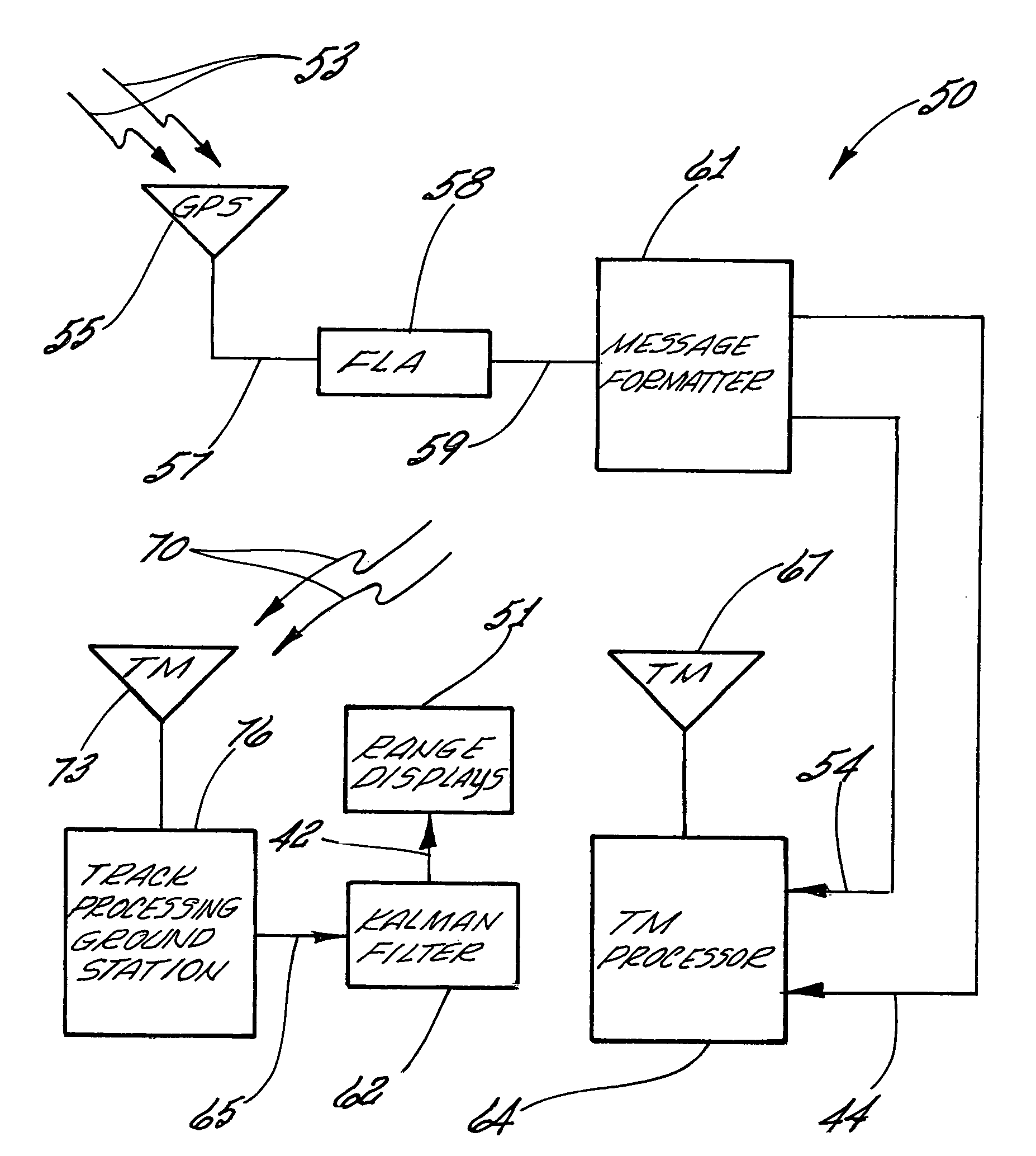
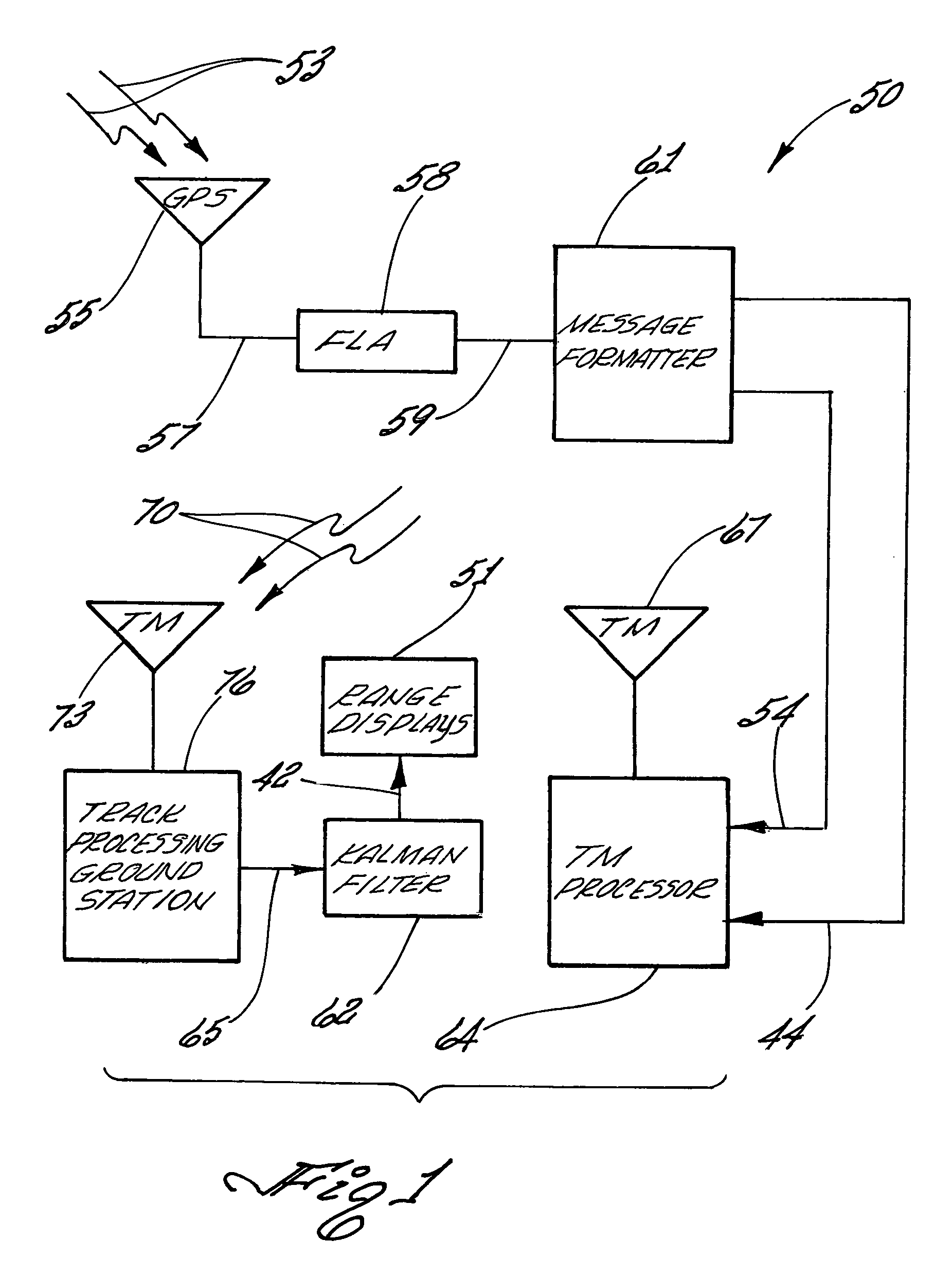
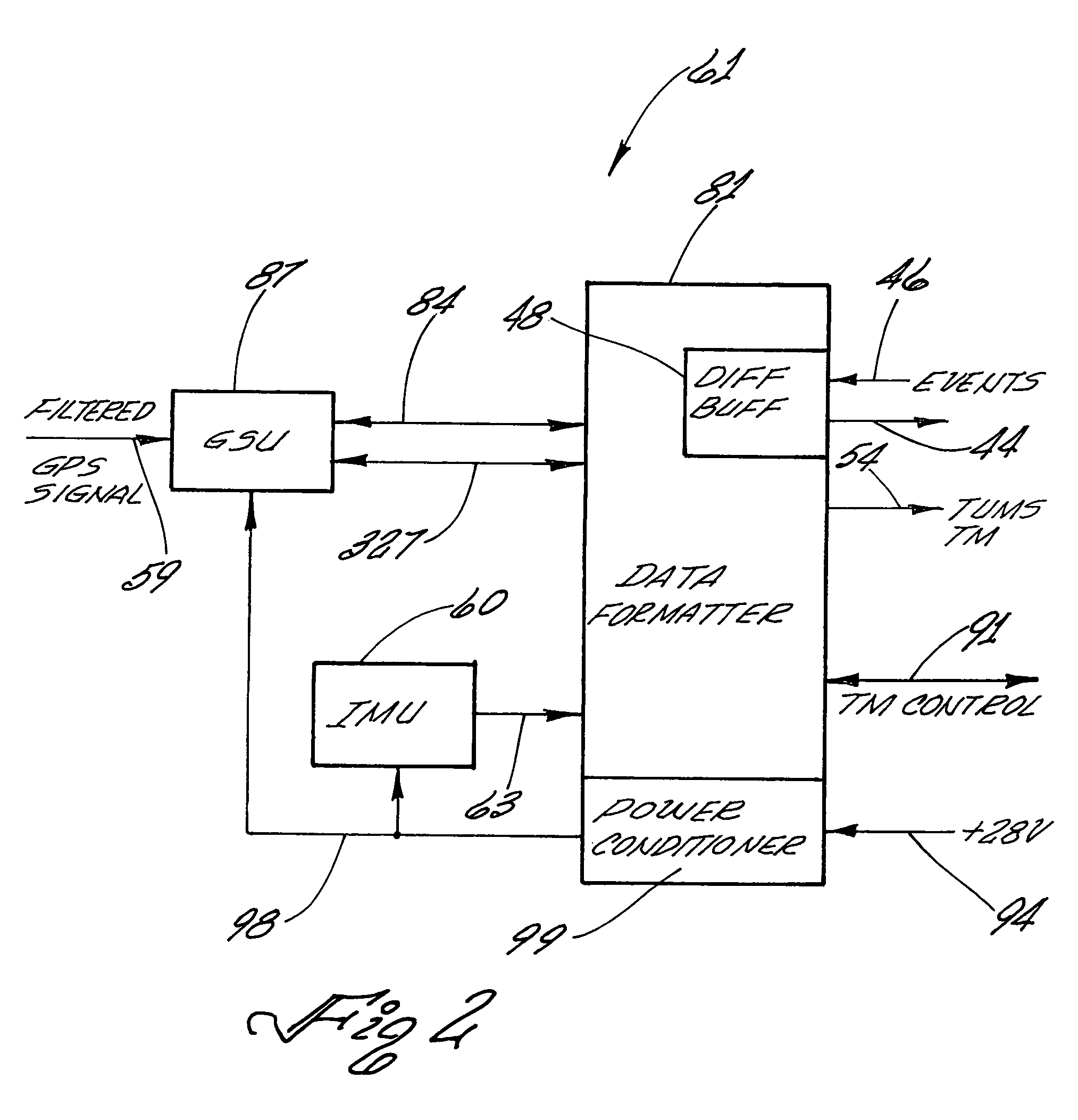
Message formatting system to improve GPS and IMU positional reporting for a vehicle
PatentActiveUS8352184B2
Innovation
- A compact, lightweight message formatting system on the vehicle integrates raw GPS and processed IMU data with system status and event markers, forming a Time Space Position Information Unit (TUMS) message that improves Kalman filter operation by preventing resets and enhancing time correlation, using a unique algorithm to integrate IMU attitude measurements with GPS data.

Kalman filter assembly intensity noise subtraction for optical heterodyne receivers
PatentInactiveUS7162165B2
Innovation
- A recursive Kalman filter is used to dynamically adjust and calibrate the intensity noise subtraction by estimating filter coefficients for FIR filters, ensuring equalization of intensity noise signals across channels and compensating for system changes, thereby enhancing the cancellation of intensity noise and improving the heterodyne signal measurement.




Real-time Implementation Considerations
Implementing Kalman filters for intermittent data patterns in real-time systems presents unique challenges that require careful consideration of computational resources, system architecture, and operational constraints. When deploying such filters in resource-constrained environments like embedded systems or IoT devices, optimization becomes critical to ensure reliable performance without compromising accuracy.
Processing speed remains a primary concern in real-time implementations. The matrix operations inherent in Kalman filtering can become computationally intensive, particularly when handling high-dimensional state vectors or when processing frequency requirements are stringent. Techniques such as matrix decomposition methods (Cholesky, QR) can significantly reduce computational load while maintaining numerical stability, essential for systems with limited processing capabilities.
Memory utilization presents another critical constraint, especially in embedded applications. The covariance matrices and state vectors can consume substantial memory resources. Implementing sparse matrix representations where appropriate or employing fixed-point arithmetic instead of floating-point can dramatically reduce memory footprint without significant accuracy loss in many applications.
Latency management becomes particularly challenging when dealing with intermittent data patterns. The system must be designed to handle variable update rates while maintaining time-critical responses. Implementing multi-rate filtering approaches, where prediction steps occur at fixed intervals while update steps are executed only when data becomes available, can help balance responsiveness with computational efficiency.
Hardware acceleration opportunities should be explored for performance-critical applications. Modern microcontrollers often include DSP instructions or floating-point units that can accelerate matrix operations. For more demanding applications, FPGAs or dedicated signal processing chips can provide substantial performance improvements through parallelization of Kalman filter operations.
Power consumption considerations are paramount for battery-operated devices. Adaptive processing techniques that adjust filter complexity based on data availability patterns can significantly extend operational life. This might include reducing prediction frequency during periods of data absence or simplifying model complexity when high precision is temporarily unnecessary.
Fault tolerance mechanisms must be incorporated to handle communication failures or sensor malfunctions that exacerbate data intermittency. Implementing health monitoring for input data streams and graceful degradation strategies ensures system resilience even under challenging operational conditions.
Processing speed remains a primary concern in real-time implementations. The matrix operations inherent in Kalman filtering can become computationally intensive, particularly when handling high-dimensional state vectors or when processing frequency requirements are stringent. Techniques such as matrix decomposition methods (Cholesky, QR) can significantly reduce computational load while maintaining numerical stability, essential for systems with limited processing capabilities.
Memory utilization presents another critical constraint, especially in embedded applications. The covariance matrices and state vectors can consume substantial memory resources. Implementing sparse matrix representations where appropriate or employing fixed-point arithmetic instead of floating-point can dramatically reduce memory footprint without significant accuracy loss in many applications.
Latency management becomes particularly challenging when dealing with intermittent data patterns. The system must be designed to handle variable update rates while maintaining time-critical responses. Implementing multi-rate filtering approaches, where prediction steps occur at fixed intervals while update steps are executed only when data becomes available, can help balance responsiveness with computational efficiency.
Hardware acceleration opportunities should be explored for performance-critical applications. Modern microcontrollers often include DSP instructions or floating-point units that can accelerate matrix operations. For more demanding applications, FPGAs or dedicated signal processing chips can provide substantial performance improvements through parallelization of Kalman filter operations.
Power consumption considerations are paramount for battery-operated devices. Adaptive processing techniques that adjust filter complexity based on data availability patterns can significantly extend operational life. This might include reducing prediction frequency during periods of data absence or simplifying model complexity when high precision is temporarily unnecessary.
Fault tolerance mechanisms must be incorporated to handle communication failures or sensor malfunctions that exacerbate data intermittency. Implementing health monitoring for input data streams and graceful degradation strategies ensures system resilience even under challenging operational conditions.
Computational Efficiency and Resource Optimization
The computational demands of Kalman filtering for intermittent data patterns present significant challenges, particularly in resource-constrained environments. Traditional implementations often require substantial processing power and memory, which becomes problematic when deployed on edge devices or in systems with limited computational capabilities. Current optimization approaches focus on reducing the computational complexity while maintaining estimation accuracy, with several strategies showing promising results.
Matrix computation optimization stands as a primary focus area, as Kalman filter operations heavily rely on matrix inversions and multiplications that scale cubically with state dimension. Recent advancements include sparse matrix representations that exploit the inherent structure of system models, reducing both memory requirements and computational complexity. For intermittent data scenarios, selective computation techniques have emerged that intelligently determine when full filter updates are necessary versus when simplified updates suffice, potentially reducing processing needs by 40-60% in typical applications.
Memory management strategies specifically designed for intermittent data patterns have shown significant improvements in resource utilization. These include dynamic allocation of memory resources based on data availability patterns and precision-scaling techniques that adjust numerical precision requirements according to the criticality of incoming measurements. Implementations utilizing these approaches have demonstrated memory footprint reductions of up to 70% compared to standard implementations while maintaining acceptable accuracy levels.
Parallel processing architectures offer another avenue for optimization, particularly relevant for systems handling multiple sensor streams with intermittent data. GPU-accelerated implementations have shown speed improvements of 5-20x for large-scale Kalman filter applications, though the energy consumption trade-offs must be carefully considered for battery-powered devices. FPGA implementations provide an alternative that balances performance gains with power efficiency, achieving up to 15x speedup with significantly lower energy requirements compared to general-purpose processors.
Energy efficiency considerations have become increasingly important, especially for IoT and mobile applications. Adaptive duty cycling approaches that modulate processing intensity based on data arrival patterns have demonstrated energy savings of 30-50% in field tests. These techniques dynamically adjust filter operation frequency and complexity based on the temporal characteristics of incoming data, effectively managing the energy-accuracy trade-off inherent in intermittent data processing scenarios.
Quantization and fixed-point arithmetic implementations further reduce computational requirements, particularly valuable for embedded systems. Recent research indicates that carefully designed 16-bit fixed-point implementations can achieve comparable accuracy to 32-bit floating-point versions while reducing both processing time and energy consumption by approximately 60%, making them particularly suitable for resource-constrained environments dealing with intermittent data patterns.
Matrix computation optimization stands as a primary focus area, as Kalman filter operations heavily rely on matrix inversions and multiplications that scale cubically with state dimension. Recent advancements include sparse matrix representations that exploit the inherent structure of system models, reducing both memory requirements and computational complexity. For intermittent data scenarios, selective computation techniques have emerged that intelligently determine when full filter updates are necessary versus when simplified updates suffice, potentially reducing processing needs by 40-60% in typical applications.
Memory management strategies specifically designed for intermittent data patterns have shown significant improvements in resource utilization. These include dynamic allocation of memory resources based on data availability patterns and precision-scaling techniques that adjust numerical precision requirements according to the criticality of incoming measurements. Implementations utilizing these approaches have demonstrated memory footprint reductions of up to 70% compared to standard implementations while maintaining acceptable accuracy levels.
Parallel processing architectures offer another avenue for optimization, particularly relevant for systems handling multiple sensor streams with intermittent data. GPU-accelerated implementations have shown speed improvements of 5-20x for large-scale Kalman filter applications, though the energy consumption trade-offs must be carefully considered for battery-powered devices. FPGA implementations provide an alternative that balances performance gains with power efficiency, achieving up to 15x speedup with significantly lower energy requirements compared to general-purpose processors.
Energy efficiency considerations have become increasingly important, especially for IoT and mobile applications. Adaptive duty cycling approaches that modulate processing intensity based on data arrival patterns have demonstrated energy savings of 30-50% in field tests. These techniques dynamically adjust filter operation frequency and complexity based on the temporal characteristics of incoming data, effectively managing the energy-accuracy trade-off inherent in intermittent data processing scenarios.
Quantization and fixed-point arithmetic implementations further reduce computational requirements, particularly valuable for embedded systems. Recent research indicates that carefully designed 16-bit fixed-point implementations can achieve comparable accuracy to 32-bit floating-point versions while reducing both processing time and energy consumption by approximately 60%, making them particularly suitable for resource-constrained environments dealing with intermittent data patterns.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!