Standards and Certifications for Soft Pneumatic Actuators
OCT 8, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Pneumatic Actuator Standards Evolution and Objectives
Pneumatic actuators have evolved significantly since their inception in the early 20th century, transitioning from rigid industrial components to sophisticated soft robotic systems. The evolution began with traditional hard pneumatic cylinders used primarily in manufacturing automation, which were governed by established standards like ISO 15552 and NFPA T3.6.7. These standards focused on dimensional specifications, performance metrics, and safety requirements for conventional pneumatic systems.
The emergence of soft pneumatic actuators (SPAs) in the late 1990s and early 2000s represented a paradigm shift, introducing compliant materials and biomimetic designs that traditional standards failed to address adequately. This technological advancement created a standardization gap that persists today, particularly concerning the unique properties of elastomeric materials, variable compliance, and non-linear behavior characteristic of SPAs.
Current standardization efforts are fragmented across multiple organizations including ISO, ASTM International, and IEEE, with each approaching different aspects of soft robotics without a unified framework specifically for SPAs. The ISO/TC 299 committee on robotics has begun preliminary discussions on soft robotic components, but comprehensive standards remain undeveloped.
The primary objectives of emerging SPA standardization initiatives include establishing consistent terminology and classification systems to facilitate clear communication among researchers, manufacturers, and end-users. Additionally, there is a pressing need to develop standardized testing protocols for material characterization, fatigue assessment, and performance evaluation under various operating conditions.
Safety certification frameworks represent another critical objective, particularly for SPAs intended for human-robot interaction applications in healthcare, assistive technologies, and collaborative industrial environments. These frameworks must address unique considerations such as maximum inflation pressure, failure modes, and biocompatibility that differ substantially from conventional pneumatic systems.
Interoperability standards constitute a further goal, aiming to ensure compatibility between different SPA systems, control interfaces, and pneumatic power sources. This would accelerate commercial adoption by reducing integration challenges and enabling modular design approaches.
The standardization landscape is complicated by the rapid pace of innovation in soft robotics, requiring standards that balance specificity with flexibility to accommodate emerging technologies. International harmonization represents a significant challenge, as different regions have varying regulatory approaches to novel robotic technologies, particularly those intended for human interaction.
The emergence of soft pneumatic actuators (SPAs) in the late 1990s and early 2000s represented a paradigm shift, introducing compliant materials and biomimetic designs that traditional standards failed to address adequately. This technological advancement created a standardization gap that persists today, particularly concerning the unique properties of elastomeric materials, variable compliance, and non-linear behavior characteristic of SPAs.
Current standardization efforts are fragmented across multiple organizations including ISO, ASTM International, and IEEE, with each approaching different aspects of soft robotics without a unified framework specifically for SPAs. The ISO/TC 299 committee on robotics has begun preliminary discussions on soft robotic components, but comprehensive standards remain undeveloped.
The primary objectives of emerging SPA standardization initiatives include establishing consistent terminology and classification systems to facilitate clear communication among researchers, manufacturers, and end-users. Additionally, there is a pressing need to develop standardized testing protocols for material characterization, fatigue assessment, and performance evaluation under various operating conditions.
Safety certification frameworks represent another critical objective, particularly for SPAs intended for human-robot interaction applications in healthcare, assistive technologies, and collaborative industrial environments. These frameworks must address unique considerations such as maximum inflation pressure, failure modes, and biocompatibility that differ substantially from conventional pneumatic systems.
Interoperability standards constitute a further goal, aiming to ensure compatibility between different SPA systems, control interfaces, and pneumatic power sources. This would accelerate commercial adoption by reducing integration challenges and enabling modular design approaches.
The standardization landscape is complicated by the rapid pace of innovation in soft robotics, requiring standards that balance specificity with flexibility to accommodate emerging technologies. International harmonization represents a significant challenge, as different regions have varying regulatory approaches to novel robotic technologies, particularly those intended for human interaction.
Market Demand Analysis for Soft Pneumatic Actuators
The global market for soft pneumatic actuators is experiencing significant growth, driven by increasing demand across multiple industries seeking safer, more adaptable automation solutions. Current market analysis indicates that the soft robotics sector, which encompasses soft pneumatic actuators, is projected to grow at a compound annual growth rate of approximately 40% through 2025, representing one of the fastest-growing segments within the broader robotics industry.
Healthcare applications represent the largest market segment for soft pneumatic actuators, with particular demand in rehabilitation devices, assistive technologies, and minimally invasive surgical tools. The aging population in developed economies has created substantial demand for rehabilitation robots and exoskeletons that utilize soft actuators to provide gentle, compliant assistance without risk of injury to patients.
Manufacturing industries are increasingly adopting collaborative robots (cobots) that incorporate soft pneumatic actuators to enable safe human-robot interaction. This trend is particularly evident in precision assembly operations where traditional rigid robots pose safety concerns. Market research indicates that manufacturers are willing to pay premium prices for systems that eliminate the need for safety cages and allow direct human-robot collaboration.
The wearable technology sector represents another rapidly expanding market for soft pneumatic actuators. Applications range from haptic feedback devices for virtual reality to smart clothing with embedded actuators for posture correction or athletic performance enhancement. Consumer interest in these technologies has grown substantially, with market surveys indicating strong willingness to adopt wearable devices that incorporate soft, comfortable actuation systems.
Geographically, North America currently leads in market adoption, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is expected to demonstrate the highest growth rate in the coming years, driven by rapid industrialization and significant investments in healthcare infrastructure.
A key market challenge remains the lack of standardized performance metrics and certification processes specifically designed for soft pneumatic actuators. End-users across industries express hesitation about widespread adoption due to uncertainty regarding reliability, durability, and safety parameters. This creates a significant market opportunity for organizations that can establish recognized standards and certification protocols.
Price sensitivity varies considerably across application domains. Medical device manufacturers demonstrate low price sensitivity due to the high value placed on patient safety, while consumer product manufacturers require more cost-effective solutions to maintain competitive pricing. This market dynamic suggests potential for tiered pricing strategies based on application requirements and performance specifications.
Healthcare applications represent the largest market segment for soft pneumatic actuators, with particular demand in rehabilitation devices, assistive technologies, and minimally invasive surgical tools. The aging population in developed economies has created substantial demand for rehabilitation robots and exoskeletons that utilize soft actuators to provide gentle, compliant assistance without risk of injury to patients.
Manufacturing industries are increasingly adopting collaborative robots (cobots) that incorporate soft pneumatic actuators to enable safe human-robot interaction. This trend is particularly evident in precision assembly operations where traditional rigid robots pose safety concerns. Market research indicates that manufacturers are willing to pay premium prices for systems that eliminate the need for safety cages and allow direct human-robot collaboration.
The wearable technology sector represents another rapidly expanding market for soft pneumatic actuators. Applications range from haptic feedback devices for virtual reality to smart clothing with embedded actuators for posture correction or athletic performance enhancement. Consumer interest in these technologies has grown substantially, with market surveys indicating strong willingness to adopt wearable devices that incorporate soft, comfortable actuation systems.
Geographically, North America currently leads in market adoption, followed by Europe and Asia-Pacific. However, the Asia-Pacific region is expected to demonstrate the highest growth rate in the coming years, driven by rapid industrialization and significant investments in healthcare infrastructure.
A key market challenge remains the lack of standardized performance metrics and certification processes specifically designed for soft pneumatic actuators. End-users across industries express hesitation about widespread adoption due to uncertainty regarding reliability, durability, and safety parameters. This creates a significant market opportunity for organizations that can establish recognized standards and certification protocols.
Price sensitivity varies considerably across application domains. Medical device manufacturers demonstrate low price sensitivity due to the high value placed on patient safety, while consumer product manufacturers require more cost-effective solutions to maintain competitive pricing. This market dynamic suggests potential for tiered pricing strategies based on application requirements and performance specifications.
Current Certification Landscape and Technical Challenges
The current certification landscape for soft pneumatic actuators (SPAs) remains fragmented and underdeveloped compared to traditional rigid actuators. Despite the growing interest in soft robotics, there is a notable absence of standardized certification frameworks specifically designed for SPAs. Existing standards primarily focus on conventional pneumatic systems (ISO 4414:2010) or industrial robots (ISO 10218), which fail to address the unique characteristics and safety considerations of soft, compliant actuators.
Major regulatory bodies including ISO, ASTM International, and IEC have yet to establish comprehensive standards for soft robotics technologies. This regulatory gap creates significant challenges for manufacturers seeking to commercialize SPA-based products, particularly in safety-critical applications such as healthcare, assistive devices, and collaborative robotics environments.
Technical challenges in certification development stem from the inherent variability in SPA materials and designs. Unlike rigid actuators with well-defined mechanical properties, SPAs exhibit non-linear behavior, material hysteresis, and performance characteristics that vary with manufacturing processes. This variability complicates the establishment of standardized testing protocols and performance metrics.
Safety assessment presents another critical challenge. Traditional safety standards for robotics assume rigid structures with predictable failure modes. In contrast, SPAs may experience unique failure mechanisms such as material fatigue, air leakage, or unexpected deformation patterns that are not addressed in existing frameworks. The lack of established methodologies for evaluating these failure modes creates uncertainty in risk assessment.
Durability testing represents a significant technical hurdle. SPAs typically undergo thousands of inflation-deflation cycles during operation, yet no standardized protocols exist for accelerated life testing or defining acceptable performance degradation over time. This absence makes it difficult to provide reliable lifetime estimates or maintenance guidelines for SPA-based systems.
Interoperability issues further complicate certification efforts. The diversity of control systems, pneumatic components, and integration approaches used with SPAs creates challenges in establishing universal compatibility standards. This fragmentation impedes the development of modular systems and increases integration complexity for end-users.
Regional regulatory differences add another layer of complexity. Medical applications of SPAs face particularly stringent requirements, with different approval pathways in the US (FDA), Europe (MDR), and Asia. The absence of harmonized standards forces developers to navigate multiple regulatory frameworks, significantly increasing compliance costs and time-to-market.
Major regulatory bodies including ISO, ASTM International, and IEC have yet to establish comprehensive standards for soft robotics technologies. This regulatory gap creates significant challenges for manufacturers seeking to commercialize SPA-based products, particularly in safety-critical applications such as healthcare, assistive devices, and collaborative robotics environments.
Technical challenges in certification development stem from the inherent variability in SPA materials and designs. Unlike rigid actuators with well-defined mechanical properties, SPAs exhibit non-linear behavior, material hysteresis, and performance characteristics that vary with manufacturing processes. This variability complicates the establishment of standardized testing protocols and performance metrics.
Safety assessment presents another critical challenge. Traditional safety standards for robotics assume rigid structures with predictable failure modes. In contrast, SPAs may experience unique failure mechanisms such as material fatigue, air leakage, or unexpected deformation patterns that are not addressed in existing frameworks. The lack of established methodologies for evaluating these failure modes creates uncertainty in risk assessment.
Durability testing represents a significant technical hurdle. SPAs typically undergo thousands of inflation-deflation cycles during operation, yet no standardized protocols exist for accelerated life testing or defining acceptable performance degradation over time. This absence makes it difficult to provide reliable lifetime estimates or maintenance guidelines for SPA-based systems.
Interoperability issues further complicate certification efforts. The diversity of control systems, pneumatic components, and integration approaches used with SPAs creates challenges in establishing universal compatibility standards. This fragmentation impedes the development of modular systems and increases integration complexity for end-users.
Regional regulatory differences add another layer of complexity. Medical applications of SPAs face particularly stringent requirements, with different approval pathways in the US (FDA), Europe (MDR), and Asia. The absence of harmonized standards forces developers to navigate multiple regulatory frameworks, significantly increasing compliance costs and time-to-market.
Existing Certification Frameworks and Testing Protocols
01 Design and structure of soft pneumatic actuators
Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air. These structures typically include chambers or channels that expand in predetermined directions when inflated, creating controlled movement. The design may incorporate various geometries, reinforcement patterns, and material combinations to achieve specific motion profiles such as bending, twisting, or extending. These structural considerations are fundamental to creating effective soft robotic systems that can interact safely with their environment.- Design and structure of soft pneumatic actuators: Soft pneumatic actuators are designed with flexible materials that deform when pressurized with air. These structures typically include chambers or channels that expand in predetermined ways to create movement. The design can incorporate various geometries and reinforcement patterns to control the direction and type of motion, such as bending, twisting, or extending. These actuators offer advantages in terms of compliance, safety, and adaptability to different environments.
- Materials for soft pneumatic actuators: The selection of materials is crucial for the performance of soft pneumatic actuators. Common materials include elastomers like silicone rubber, thermoplastic polyurethanes, and other flexible polymers that can withstand repeated inflation and deflation cycles. Some designs incorporate fiber reinforcements, fabric layers, or composite structures to control deformation patterns and increase durability. Advanced materials may also feature self-healing properties or responsive characteristics that enhance functionality.
- Control systems and pneumatic networks: Effective control systems are essential for precise operation of soft pneumatic actuators. These systems typically include pressure regulators, valves, sensors, and control algorithms that manage air flow and pressure distribution. Some designs feature distributed pneumatic networks that allow for complex movements by selectively activating different chambers. Advanced control strategies may incorporate machine learning or adaptive algorithms to improve performance and respond to changing conditions.
- Applications in robotics and biomimetic systems: Soft pneumatic actuators are widely used in soft robotics and biomimetic systems that mimic natural movements. Applications include robotic grippers that can handle delicate objects, wearable assistive devices for rehabilitation, and biomimetic robots that replicate the locomotion of animals like octopuses or caterpillars. These actuators are particularly valuable in human-robot interaction scenarios where safety and compliance are priorities, such as medical devices or collaborative robots.
- Manufacturing techniques and fabrication methods: Various manufacturing techniques are employed to create soft pneumatic actuators, including molding, 3D printing, and layered fabrication. Molding processes often involve creating negative molds into which elastomers are poured and cured. Advanced fabrication methods may incorporate multi-material printing to create integrated structures with varying stiffness properties. Some techniques focus on scalable production methods to enable mass manufacturing of soft actuators for commercial applications.
02 Materials for soft pneumatic actuators
The selection of materials is crucial for soft pneumatic actuators, with elastomers like silicone rubber being commonly used due to their flexibility, durability, and air-tight properties. These materials must balance softness for deformation with strength to withstand repeated inflation cycles. Some designs incorporate composite structures with varying material properties in different regions to control deformation patterns. Advanced materials may also feature self-healing capabilities or responsive properties that enhance the actuator's performance and longevity.Expand Specific Solutions03 Control systems for soft pneumatic actuators
Control systems for soft pneumatic actuators typically involve pressure regulation, valve systems, and feedback mechanisms to achieve precise movements. These systems may incorporate sensors to monitor pressure, position, or force, enabling closed-loop control for more accurate operation. Advanced control strategies might include machine learning algorithms to adapt to changing conditions or improve performance over time. The integration of electronic components with the pneumatic system is essential for creating responsive and reliable soft robotic applications.Expand Specific Solutions04 Applications of soft pneumatic actuators
Soft pneumatic actuators find applications across various fields due to their inherent safety and adaptability. In healthcare, they're used for assistive devices, rehabilitation equipment, and minimally invasive surgical tools. Industrial applications include grippers for delicate object manipulation and adaptive manufacturing tools. They're also employed in wearable technology, prosthetics, and human-robot interaction scenarios where traditional rigid actuators might pose safety concerns. The inherent compliance of these actuators makes them particularly suitable for environments requiring safe physical human-robot interaction.Expand Specific Solutions05 Fabrication methods for soft pneumatic actuators
Fabrication techniques for soft pneumatic actuators include molding, 3D printing, and layered manufacturing approaches. Molding processes typically involve creating a negative mold into which elastomeric materials are poured and cured. 3D printing enables more complex internal channel structures and customization options. Some advanced fabrication methods incorporate embedded components during the manufacturing process, such as sensors or reinforcement materials. These techniques continue to evolve, allowing for increasingly sophisticated designs with integrated functionality and improved performance characteristics.Expand Specific Solutions
Key Industry Players and Certification Bodies
The field of Soft Pneumatic Actuators is currently in a transitional phase from early development to commercial adoption, with a growing market expected to reach significant scale as applications expand across robotics, healthcare, and industrial automation. The technology maturity landscape shows academic institutions leading fundamental research, with Harvard, MIT, and University of California establishing core intellectual property. Commercial development is advancing through specialized companies like Artimus Robotics and Bioliberty, while established industrial players including Festo, Toyota, and Hyundai are integrating these technologies into their product ecosystems. The lack of unified standards and certifications remains a critical barrier to widespread adoption, with ongoing collaborative efforts between academic institutions and industry leaders to establish regulatory frameworks that address safety, performance, and interoperability concerns.
President & Fellows of Harvard College
Technical Solution: Harvard's Wyss Institute has pioneered soft pneumatic actuator (SPA) technology through their groundbreaking work on soft robotics. Their technical approach focuses on developing biomimetic soft actuators that utilize pressurized air to create controlled motion and force. Harvard researchers have established fundamental design principles for SPAs including fiber-reinforced elastomeric enclosures that enable predictable motion patterns when inflated. They've developed standardized testing protocols for characterizing SPA performance metrics such as force output, displacement, response time, and fatigue life. Harvard has also created a comprehensive material selection framework for SPAs, evaluating silicones, polyurethanes, and other elastomers based on durability, biocompatibility, and manufacturing compatibility. Their research has established safety guidelines for operating pressures, failure modes, and risk assessment methodologies specifically tailored to soft pneumatic systems. Harvard's work has significantly influenced emerging ISO standards for soft robotics safety and performance evaluation.
Strengths: Harvard's approach offers superior biomimetic capabilities, enabling natural motion patterns ideal for human-robot interaction. Their extensive material research provides robust solutions for various application environments. Weaknesses: Their highly specialized designs may require complex manufacturing processes, potentially limiting mass production scalability. The custom nature of their solutions can make standardization across the industry challenging.
Artimus Robotics, Inc.
Technical Solution: Artimus Robotics has developed a proprietary HASEL (Hydraulically Amplified Self-healing Electrostatic) actuator technology that represents a hybrid approach combining pneumatic and electrostatic principles. Their technical solution features electrically controlled soft actuators that utilize specialized dielectric fluids within sealed elastomeric pouches. When voltage is applied, electrostatic forces cause controlled deformation, creating motion similar to traditional pneumatic systems but with electrical control. Artimus has established comprehensive testing protocols for their actuators, measuring performance metrics including force output (up to 100N depending on configuration), displacement (typically 10-30% strain), response time (as fast as 50ms), and cycle life (exceeding 500,000 cycles in controlled conditions). They've developed material certification standards specifically addressing the unique requirements of electro-hydraulic systems, including dielectric strength, fluid compatibility, and seal integrity. Their technical approach includes standardized electrical safety protocols for high-voltage soft actuators, establishing maximum operating voltages, insulation requirements, and failure containment strategies. Artimus actively contributes to emerging standards discussions through participation in industry consortia and research partnerships.
Strengths: Artimus's electro-hydraulic approach offers precise electrical control without requiring external pneumatic infrastructure, simplifying system integration. Their technology provides faster response times than many traditional pneumatic systems. Weaknesses: The high voltage requirements (typically 1-10kV) create additional safety considerations compared to pure pneumatic systems. The technology is relatively new, with less established long-term performance data compared to traditional pneumatic approaches.
Critical Standards and Technical Documentation Review
Soft actuators and soft actuating devices
PatentWO2016011345A1
Innovation
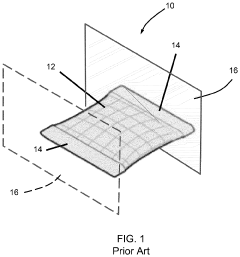
- The development of soft buckling linear actuators that utilize bucklable, elastic structural components to generate linear forces through fluid inflation or deflation, allowing for parallel actuation and mimicking biological muscle properties without volume expansion, enabling safe and efficient operation in confined spaces.




Pneumatic soft actuators with tunable force-displacement relation and methods and machines therefor
PatentPendingUS20230373082A1
Innovation
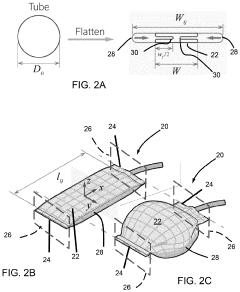
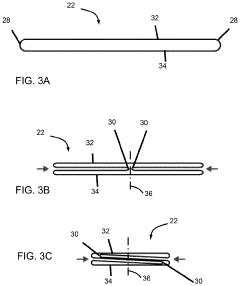
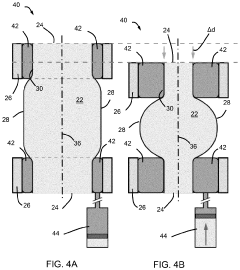
- A pneumatic soft actuator with an inflatable pouch featuring symmetrical folds at its ends, allowing for active modification of the end geometry through a branched tendon and spool mechanism, enabling adjustment of the force-strain relationship and range of motion without altering the pouch's composition or structure.
Safety and Compliance Requirements for Pneumatic Systems
Safety compliance for soft pneumatic actuators represents a critical yet evolving area within the broader pneumatic systems regulatory landscape. Current safety standards primarily address conventional rigid pneumatic systems, creating a significant regulatory gap for soft actuators. These innovative components, characterized by their compliant materials and variable geometries, present unique safety considerations that traditional frameworks fail to adequately address.
The regulatory environment for pneumatic systems is primarily governed by ISO 4414:2010 (Pneumatic fluid power - General rules and safety requirements for systems and their components) and EN 983 (Safety of machinery - Safety requirements for fluid power systems and their components - Pneumatics). However, these standards were developed with rigid metal components in mind, not the elastomeric materials typical in soft actuators.
Pressure safety represents the foremost compliance concern, with most jurisdictions imposing strict requirements on pressure vessel design and operation. Soft pneumatic actuators often operate at lower pressures (typically 100-600 kPa) than conventional systems, but their flexible nature introduces unique failure modes not contemplated in existing standards. Material degradation, delamination, and non-linear deformation behaviors require specialized testing protocols currently absent from regulatory frameworks.
Biocompatibility requirements become particularly relevant when soft actuators are deployed in medical, wearable, or human-collaborative applications. Standards such as ISO 10993 (Biological evaluation of medical devices) may apply, necessitating extensive testing for cytotoxicity, sensitization, and irritation when human contact is anticipated. The materials commonly used in soft actuators—silicones, elastomers, and flexible polymers—require specific validation procedures.
Electrical safety considerations emerge when soft actuators incorporate sensing elements or are controlled by electronic systems. Compliance with IEC 60204-1 (Safety of machinery - Electrical equipment of machines) becomes necessary, particularly regarding protection against moisture ingress—a common concern with pneumatic systems that may experience condensation.
Environmental compliance requirements address both operational conditions and end-of-life considerations. The chemical composition of elastomers used in soft actuators may fall under regulations such as REACH in Europe or similar chemical management regulations globally, particularly when containing plasticizers or other potentially hazardous additives.
The absence of specific certification pathways for soft pneumatic actuators presents significant challenges for manufacturers seeking regulatory approval. Currently, most adopt a risk-based approach, demonstrating compliance with fundamental safety principles through extensive testing and documentation rather than following clearly defined certification protocols.
The regulatory environment for pneumatic systems is primarily governed by ISO 4414:2010 (Pneumatic fluid power - General rules and safety requirements for systems and their components) and EN 983 (Safety of machinery - Safety requirements for fluid power systems and their components - Pneumatics). However, these standards were developed with rigid metal components in mind, not the elastomeric materials typical in soft actuators.
Pressure safety represents the foremost compliance concern, with most jurisdictions imposing strict requirements on pressure vessel design and operation. Soft pneumatic actuators often operate at lower pressures (typically 100-600 kPa) than conventional systems, but their flexible nature introduces unique failure modes not contemplated in existing standards. Material degradation, delamination, and non-linear deformation behaviors require specialized testing protocols currently absent from regulatory frameworks.
Biocompatibility requirements become particularly relevant when soft actuators are deployed in medical, wearable, or human-collaborative applications. Standards such as ISO 10993 (Biological evaluation of medical devices) may apply, necessitating extensive testing for cytotoxicity, sensitization, and irritation when human contact is anticipated. The materials commonly used in soft actuators—silicones, elastomers, and flexible polymers—require specific validation procedures.
Electrical safety considerations emerge when soft actuators incorporate sensing elements or are controlled by electronic systems. Compliance with IEC 60204-1 (Safety of machinery - Electrical equipment of machines) becomes necessary, particularly regarding protection against moisture ingress—a common concern with pneumatic systems that may experience condensation.
Environmental compliance requirements address both operational conditions and end-of-life considerations. The chemical composition of elastomers used in soft actuators may fall under regulations such as REACH in Europe or similar chemical management regulations globally, particularly when containing plasticizers or other potentially hazardous additives.
The absence of specific certification pathways for soft pneumatic actuators presents significant challenges for manufacturers seeking regulatory approval. Currently, most adopt a risk-based approach, demonstrating compliance with fundamental safety principles through extensive testing and documentation rather than following clearly defined certification protocols.
Cross-Industry Adoption Barriers and Solutions
The adoption of soft pneumatic actuators (SPAs) across diverse industries faces significant barriers due to the lack of standardized frameworks and certification processes. Manufacturing sectors, healthcare applications, and robotics companies each encounter unique challenges when attempting to integrate this emerging technology. In manufacturing, the absence of standardized performance metrics makes it difficult to compare different SPA solutions, leading to hesitation in replacing traditional rigid actuators with soft alternatives despite their potential benefits in human-machine collaboration environments.
Healthcare applications face particularly stringent regulatory hurdles, as medical device certification requires extensive safety validation. Without established testing protocols specifically designed for soft materials in contact with patients, the certification process becomes prohibitively lengthy and expensive. This regulatory uncertainty has significantly slowed the integration of promising SPA technologies in rehabilitation devices, surgical tools, and assistive technologies.
The robotics industry struggles with interoperability issues stemming from proprietary control systems and non-standardized interfaces. Companies developing soft robotic solutions often create closed ecosystems, limiting the potential for cross-platform integration and hindering widespread adoption. Additionally, insurance and liability concerns arise when implementing novel actuator technologies without industry-recognized safety standards, creating financial risks for early adopters.
Solutions to these cross-industry barriers require multi-stakeholder collaboration. Industry consortia comprising technology developers, end-users, and regulatory bodies have begun establishing working groups focused on developing performance benchmarking standards for SPAs. These initiatives aim to create standardized testing methodologies that account for the unique properties of soft materials, including fatigue resistance, response time under varying loads, and material degradation patterns.
Regulatory sandboxes represent another promising approach, allowing controlled testing of SPA technologies in real-world environments while developing appropriate certification frameworks. Several countries have implemented these programs specifically for soft robotics applications, creating pathways for accelerated approval while maintaining safety oversight. These initiatives provide valuable data for establishing evidence-based certification requirements.
Open-source reference designs and standardized communication protocols are emerging as solutions to interoperability challenges. Organizations like the Soft Robotics Toolkit and the IEEE Working Group on Soft Robotics Standards are developing common interfaces and control architectures that enable cross-platform integration. These efforts reduce implementation barriers while fostering innovation through collaborative development rather than proprietary isolation.
Healthcare applications face particularly stringent regulatory hurdles, as medical device certification requires extensive safety validation. Without established testing protocols specifically designed for soft materials in contact with patients, the certification process becomes prohibitively lengthy and expensive. This regulatory uncertainty has significantly slowed the integration of promising SPA technologies in rehabilitation devices, surgical tools, and assistive technologies.
The robotics industry struggles with interoperability issues stemming from proprietary control systems and non-standardized interfaces. Companies developing soft robotic solutions often create closed ecosystems, limiting the potential for cross-platform integration and hindering widespread adoption. Additionally, insurance and liability concerns arise when implementing novel actuator technologies without industry-recognized safety standards, creating financial risks for early adopters.
Solutions to these cross-industry barriers require multi-stakeholder collaboration. Industry consortia comprising technology developers, end-users, and regulatory bodies have begun establishing working groups focused on developing performance benchmarking standards for SPAs. These initiatives aim to create standardized testing methodologies that account for the unique properties of soft materials, including fatigue resistance, response time under varying loads, and material degradation patterns.
Regulatory sandboxes represent another promising approach, allowing controlled testing of SPA technologies in real-world environments while developing appropriate certification frameworks. Several countries have implemented these programs specifically for soft robotics applications, creating pathways for accelerated approval while maintaining safety oversight. These initiatives provide valuable data for establishing evidence-based certification requirements.
Open-source reference designs and standardized communication protocols are emerging as solutions to interoperability challenges. Organizations like the Soft Robotics Toolkit and the IEEE Working Group on Soft Robotics Standards are developing common interfaces and control architectures that enable cross-platform integration. These efforts reduce implementation barriers while fostering innovation through collaborative development rather than proprietary isolation.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!