

Enhancing Visual Servoing for Adaptive Street Lighting Solutions
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing Street Lighting Background and Objectives
Visual servoing technology has emerged as a critical component in modern automation systems, representing the intersection of computer vision, robotics, and control theory. This technology enables real-time feedback control using visual information captured by cameras, allowing systems to adapt dynamically to environmental changes. The evolution of visual servoing began in the 1980s with basic position-based control systems and has progressed through image-based servoing to today's hybrid approaches that combine multiple sensing modalities.
The street lighting industry has undergone significant transformation over the past two decades, transitioning from traditional incandescent and fluorescent systems to LED-based solutions. This evolution has been driven by energy efficiency requirements, environmental regulations, and smart city initiatives. Current street lighting systems increasingly incorporate sensors, wireless communication, and adaptive control mechanisms to optimize energy consumption while maintaining adequate illumination levels for safety and security.
The convergence of visual servoing technology with adaptive street lighting represents a paradigm shift toward intelligent urban infrastructure. Traditional street lighting systems operate on predetermined schedules or simple photocell controls, lacking the sophistication to respond to real-time environmental conditions such as weather changes, traffic density, or pedestrian activity. Visual servoing introduces the capability for continuous monitoring and adjustment based on actual visual feedback from the environment.
The primary objective of enhancing visual servoing for adaptive street lighting solutions is to develop intelligent lighting systems that can automatically adjust illumination parameters based on real-time visual analysis of the surrounding environment. This includes optimizing light intensity, beam direction, and color temperature in response to varying conditions such as ambient light levels, weather conditions, traffic patterns, and pedestrian presence.
Secondary objectives encompass energy efficiency optimization through precise control of lighting output, reduction of light pollution through targeted illumination, and enhancement of public safety through improved visibility in critical areas. The technology aims to create self-regulating lighting networks that can learn from environmental patterns and predict optimal lighting configurations for different scenarios.
The technical goals include developing robust computer vision algorithms capable of operating reliably under varying weather conditions, implementing real-time control systems with minimal latency, and creating scalable solutions that can be deployed across diverse urban environments. Integration with existing smart city infrastructure and compatibility with various lighting hardware platforms represent additional key objectives for widespread adoption.
The street lighting industry has undergone significant transformation over the past two decades, transitioning from traditional incandescent and fluorescent systems to LED-based solutions. This evolution has been driven by energy efficiency requirements, environmental regulations, and smart city initiatives. Current street lighting systems increasingly incorporate sensors, wireless communication, and adaptive control mechanisms to optimize energy consumption while maintaining adequate illumination levels for safety and security.
The convergence of visual servoing technology with adaptive street lighting represents a paradigm shift toward intelligent urban infrastructure. Traditional street lighting systems operate on predetermined schedules or simple photocell controls, lacking the sophistication to respond to real-time environmental conditions such as weather changes, traffic density, or pedestrian activity. Visual servoing introduces the capability for continuous monitoring and adjustment based on actual visual feedback from the environment.
The primary objective of enhancing visual servoing for adaptive street lighting solutions is to develop intelligent lighting systems that can automatically adjust illumination parameters based on real-time visual analysis of the surrounding environment. This includes optimizing light intensity, beam direction, and color temperature in response to varying conditions such as ambient light levels, weather conditions, traffic patterns, and pedestrian presence.
Secondary objectives encompass energy efficiency optimization through precise control of lighting output, reduction of light pollution through targeted illumination, and enhancement of public safety through improved visibility in critical areas. The technology aims to create self-regulating lighting networks that can learn from environmental patterns and predict optimal lighting configurations for different scenarios.
The technical goals include developing robust computer vision algorithms capable of operating reliably under varying weather conditions, implementing real-time control systems with minimal latency, and creating scalable solutions that can be deployed across diverse urban environments. Integration with existing smart city infrastructure and compatibility with various lighting hardware platforms represent additional key objectives for widespread adoption.
Market Demand for Adaptive Smart Street Lighting Systems
The global smart street lighting market is experiencing unprecedented growth driven by urbanization trends, sustainability mandates, and technological advancement convergence. Municipal governments worldwide are increasingly prioritizing energy-efficient infrastructure solutions as urban populations continue expanding and environmental regulations become more stringent. This transformation creates substantial demand for adaptive lighting systems that can dynamically respond to real-time conditions while minimizing energy consumption.
Traditional street lighting infrastructure faces mounting pressure from multiple directions. Rising energy costs burden municipal budgets, while aging lighting networks require extensive maintenance and replacement cycles. Simultaneously, cities must address growing concerns about light pollution, public safety optimization, and carbon footprint reduction. These challenges collectively drive demand for intelligent lighting solutions capable of adaptive behavior based on environmental conditions, pedestrian traffic, and vehicular movement patterns.
Smart city initiatives represent a primary market catalyst, with governments allocating significant budgets toward connected infrastructure development. These programs emphasize integrated systems that combine lighting with additional urban services such as traffic monitoring, environmental sensing, and emergency response capabilities. The convergence of Internet of Things technologies, advanced sensor networks, and machine learning algorithms enables sophisticated lighting management previously considered technically unfeasible or economically prohibitive.
Commercial and industrial sectors demonstrate parallel demand patterns, particularly in logistics facilities, manufacturing complexes, and retail environments. These applications require precise lighting control that adapts to operational schedules, occupancy patterns, and specific task requirements. Visual servoing technologies offer compelling value propositions by enabling automated adjustment based on real-time visual feedback rather than predetermined programming schedules.
Regulatory frameworks increasingly mandate energy efficiency improvements and carbon emission reductions, creating compliance-driven market demand. Many jurisdictions implement building codes and municipal standards requiring adaptive lighting capabilities in new construction and major renovation projects. These regulations establish minimum performance thresholds that traditional static lighting systems cannot achieve, necessitating intelligent solutions.
The market exhibits strong growth momentum across developed and emerging economies, with particularly robust demand in regions experiencing rapid urban development. Infrastructure modernization programs, coupled with declining costs of sensor technologies and wireless communication systems, expand market accessibility beyond premium applications toward mainstream municipal deployments.
Traditional street lighting infrastructure faces mounting pressure from multiple directions. Rising energy costs burden municipal budgets, while aging lighting networks require extensive maintenance and replacement cycles. Simultaneously, cities must address growing concerns about light pollution, public safety optimization, and carbon footprint reduction. These challenges collectively drive demand for intelligent lighting solutions capable of adaptive behavior based on environmental conditions, pedestrian traffic, and vehicular movement patterns.
Smart city initiatives represent a primary market catalyst, with governments allocating significant budgets toward connected infrastructure development. These programs emphasize integrated systems that combine lighting with additional urban services such as traffic monitoring, environmental sensing, and emergency response capabilities. The convergence of Internet of Things technologies, advanced sensor networks, and machine learning algorithms enables sophisticated lighting management previously considered technically unfeasible or economically prohibitive.
Commercial and industrial sectors demonstrate parallel demand patterns, particularly in logistics facilities, manufacturing complexes, and retail environments. These applications require precise lighting control that adapts to operational schedules, occupancy patterns, and specific task requirements. Visual servoing technologies offer compelling value propositions by enabling automated adjustment based on real-time visual feedback rather than predetermined programming schedules.
Regulatory frameworks increasingly mandate energy efficiency improvements and carbon emission reductions, creating compliance-driven market demand. Many jurisdictions implement building codes and municipal standards requiring adaptive lighting capabilities in new construction and major renovation projects. These regulations establish minimum performance thresholds that traditional static lighting systems cannot achieve, necessitating intelligent solutions.
The market exhibits strong growth momentum across developed and emerging economies, with particularly robust demand in regions experiencing rapid urban development. Infrastructure modernization programs, coupled with declining costs of sensor technologies and wireless communication systems, expand market accessibility beyond premium applications toward mainstream municipal deployments.
Current State and Challenges of Visual Servoing in Lighting
Visual servoing technology in lighting applications has experienced significant advancement over the past decade, yet several critical challenges continue to impede its widespread adoption in adaptive street lighting systems. Current implementations primarily rely on conventional camera-based feedback systems that struggle with the dynamic nature of outdoor environments and varying illumination conditions.
The existing visual servoing frameworks in lighting control face substantial limitations in real-time processing capabilities. Most current systems operate with latency issues ranging from 200-500 milliseconds, which proves inadequate for responsive adaptive lighting that must react to rapidly changing traffic patterns and pedestrian movements. This delay significantly impacts the effectiveness of energy-saving algorithms and compromises safety requirements in urban lighting infrastructure.
Environmental robustness remains a paramount challenge for visual servoing systems deployed in street lighting applications. Current sensor technologies demonstrate poor performance under adverse weather conditions such as fog, rain, and snow, where visibility is compromised and traditional computer vision algorithms fail to maintain accurate object detection and tracking. The temperature variations and humidity fluctuations typical in outdoor environments further degrade sensor reliability and system longevity.
Integration complexity presents another significant barrier to widespread adoption. Existing visual servoing solutions require extensive calibration procedures and specialized hardware configurations that increase installation costs and maintenance requirements. The lack of standardized communication protocols between visual sensors and lighting control systems creates compatibility issues across different manufacturer ecosystems, limiting scalability and interoperability.
Power consumption optimization represents a critical technical challenge that current visual servoing systems have not adequately addressed. The computational demands of real-time image processing and machine learning algorithms often exceed the energy savings achieved through adaptive lighting control, creating a paradoxical situation where smart lighting systems consume more power than traditional static installations.
Data processing and storage limitations further constrain current implementations. The massive volumes of visual data generated by camera networks require sophisticated edge computing solutions and robust data management strategies. Current systems often rely on cloud-based processing, introducing network dependency and potential security vulnerabilities that are unacceptable for critical infrastructure applications.
Finally, the accuracy and precision of current visual servoing algorithms in lighting applications remain insufficient for optimal performance. Object classification errors, false positive detections, and tracking failures under varying lighting conditions result in suboptimal lighting responses that fail to deliver the promised energy efficiency and user experience improvements expected from next-generation adaptive street lighting solutions.
The existing visual servoing frameworks in lighting control face substantial limitations in real-time processing capabilities. Most current systems operate with latency issues ranging from 200-500 milliseconds, which proves inadequate for responsive adaptive lighting that must react to rapidly changing traffic patterns and pedestrian movements. This delay significantly impacts the effectiveness of energy-saving algorithms and compromises safety requirements in urban lighting infrastructure.
Environmental robustness remains a paramount challenge for visual servoing systems deployed in street lighting applications. Current sensor technologies demonstrate poor performance under adverse weather conditions such as fog, rain, and snow, where visibility is compromised and traditional computer vision algorithms fail to maintain accurate object detection and tracking. The temperature variations and humidity fluctuations typical in outdoor environments further degrade sensor reliability and system longevity.
Integration complexity presents another significant barrier to widespread adoption. Existing visual servoing solutions require extensive calibration procedures and specialized hardware configurations that increase installation costs and maintenance requirements. The lack of standardized communication protocols between visual sensors and lighting control systems creates compatibility issues across different manufacturer ecosystems, limiting scalability and interoperability.
Power consumption optimization represents a critical technical challenge that current visual servoing systems have not adequately addressed. The computational demands of real-time image processing and machine learning algorithms often exceed the energy savings achieved through adaptive lighting control, creating a paradoxical situation where smart lighting systems consume more power than traditional static installations.
Data processing and storage limitations further constrain current implementations. The massive volumes of visual data generated by camera networks require sophisticated edge computing solutions and robust data management strategies. Current systems often rely on cloud-based processing, introducing network dependency and potential security vulnerabilities that are unacceptable for critical infrastructure applications.
Finally, the accuracy and precision of current visual servoing algorithms in lighting applications remain insufficient for optimal performance. Object classification errors, false positive detections, and tracking failures under varying lighting conditions result in suboptimal lighting responses that fail to deliver the promised energy efficiency and user experience improvements expected from next-generation adaptive street lighting solutions.
Existing Visual Servoing Solutions for Street Lighting
01 Image-based visual servoing control methods
Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate motion commands.- Image-based visual servoing control methods: Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.
- Position-based visual servoing with 3D pose estimation: This approach involves estimating the 3D pose of objects or targets from visual data and using this pose information to control robot movements. The system reconstructs spatial relationships between the camera and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.
- Visual servoing for robotic manipulation and grasping: Visual servoing techniques are applied to guide robotic arms and grippers for object manipulation tasks. The system uses visual feedback to adjust the robot's approach trajectory, grasp configuration, and manipulation movements in real-time. This enables adaptive handling of objects with varying positions, orientations, or shapes, improving the robustness and flexibility of automated manipulation operations.
- Multi-camera and stereo vision-based servoing systems: Advanced visual servoing implementations employ multiple cameras or stereo vision configurations to enhance depth perception and expand the field of view. These systems fuse information from multiple viewpoints to improve tracking accuracy, handle occlusions, and provide more robust control in complex environments. The multi-camera setup enables better spatial understanding and more reliable visual feedback for control purposes.
- Deep learning and AI-enhanced visual servoing: Modern visual servoing systems incorporate deep learning and artificial intelligence techniques to improve feature detection, object recognition, and control performance. Neural networks are trained to extract relevant visual features, predict object motion, or directly learn control policies from visual input. These AI-enhanced approaches enable visual servoing systems to handle more complex scenarios, adapt to varying conditions, and achieve higher performance in challenging tasks.
02 Position-based visual servoing with 3D pose estimation
This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this pose information to control robotic systems. The method reconstructs spatial relationships between the camera, robot, and target objects, enabling precise manipulation and navigation tasks. Pose estimation algorithms process visual features to determine position and orientation in Cartesian space, which is then used for motion planning and control.Expand Specific Solutions03 Visual servoing for robotic manipulation and grasping
Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. These systems use visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying shapes, sizes, and positions. The integration of vision sensors with robotic manipulators allows for flexible automation in manufacturing, assembly, and material handling applications.Expand Specific Solutions04 Deep learning and neural network approaches for visual servoing
Modern visual servoing systems incorporate deep learning algorithms and neural networks to enhance perception and control capabilities. These methods learn complex mappings between visual inputs and control outputs through training on large datasets, improving robustness to variations in lighting, occlusions, and object appearances. Neural network-based approaches can handle non-linear dynamics and adapt to changing environments without explicit programming of feature extraction or control laws.Expand Specific Solutions05 Multi-camera and stereo vision systems for enhanced visual servoing
Advanced visual servoing implementations utilize multiple cameras or stereo vision configurations to obtain richer spatial information and improve system performance. These setups provide depth perception, wider field of view, and redundancy for robust operation. Multi-view systems enable better handling of occlusions, improved accuracy in 3D localization, and enhanced capability for complex tasks requiring comprehensive scene understanding.Expand Specific Solutions
Key Players in Smart Lighting and Computer Vision Industry
The adaptive street lighting market utilizing visual servoing technology is in its early growth stage, driven by smart city initiatives and energy efficiency demands. The market shows significant expansion potential as municipalities increasingly adopt intelligent lighting solutions. Technology maturity varies considerably across the competitive landscape. Established automotive lighting leaders like HELLA GmbH & Co. KGaA, Valeo Vision SA, and ZKW Group GmbH leverage their advanced sensor and vision system expertise to enter smart lighting applications. Premium automotive manufacturers including Mercedes-Benz Group AG, BMW AG, and Volkswagen AG contribute sophisticated adaptive lighting technologies that translate to street lighting solutions. Traditional lighting specialists such as Koninklijke Philips NV and Zumtobel Lighting GmbH integrate IoT capabilities with their existing infrastructure expertise. Emerging AI-focused companies like Artificial Intelligent Interconnection Technology Co., Ltd. and Ping An Technology bring cutting-edge machine learning algorithms for enhanced visual servoing capabilities. This diverse ecosystem combines mature hardware technologies with evolving AI software solutions, creating a competitive environment where traditional lighting expertise meets advanced computer vision innovation.
Valeo Vision SA
Technical Solution: Valeo has pioneered visual servoing technology for automotive adaptive lighting systems that can be adapted for street lighting applications. Their BeamAtic LED technology incorporates advanced camera-based visual feedback systems that continuously monitor road conditions and adjust beam patterns accordingly. The system uses real-time image processing to detect oncoming traffic, pedestrians, and environmental conditions, automatically modifying light distribution to optimize visibility while preventing glare. Their visual servoing algorithms process data from multiple sensors including cameras, LiDAR, and ambient light sensors to create dynamic lighting responses. The technology features predictive lighting capabilities that anticipate lighting needs based on traffic patterns and pedestrian movement analysis.
Strengths: Strong automotive lighting expertise with proven adaptive lighting technologies and robust sensor integration capabilities. Weaknesses: Primary focus on automotive applications may require significant adaptation for street lighting infrastructure and municipal requirements.
HELLA GmbH & Co. KGaA
Technical Solution: HELLA has developed intelligent lighting systems that incorporate visual servoing technology for adaptive illumination control. Their Matrix LED technology uses camera-based visual feedback to continuously monitor the lighting environment and adjust individual LED segments in real-time. The system employs computer vision algorithms to detect objects, measure ambient light conditions, and analyze traffic patterns to optimize lighting distribution. Their visual servoing solution includes advanced image processing capabilities that can distinguish between different types of road users and environmental conditions, enabling precise lighting control that adapts to specific scenarios. The technology integrates with smart city infrastructure to provide centralized monitoring and control of lighting networks while maintaining autonomous operation capabilities.
Strengths: Extensive experience in automotive lighting with strong R&D capabilities in adaptive lighting technologies and established manufacturing infrastructure. Weaknesses: Limited direct experience in municipal street lighting applications and potential challenges in scaling automotive solutions to city-wide implementations.
Core Innovations in Adaptive Visual Servoing Systems
A centralized model predictive lighting control method and a centralized prediction-based controllable street lighting system
PatentInactiveEP4369866A1
Innovation
- A centralized model predictive lighting control method that adjusts streetlight intensities using a Model Predictive Control (MPC) algorithm, predicting light intensity over a horizon with a time resolution, considering weather, traffic, and pedestrian conditions, and optimizing energy efficiency and visibility through spatial coordination-based models and dynamic reference values.




Automatic adjusting system for street lamp brightness based on vision technology
PatentActiveCN104822196A
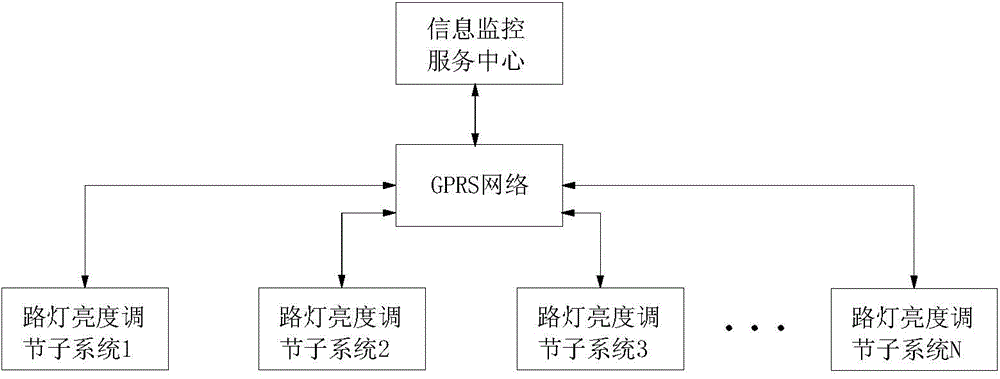
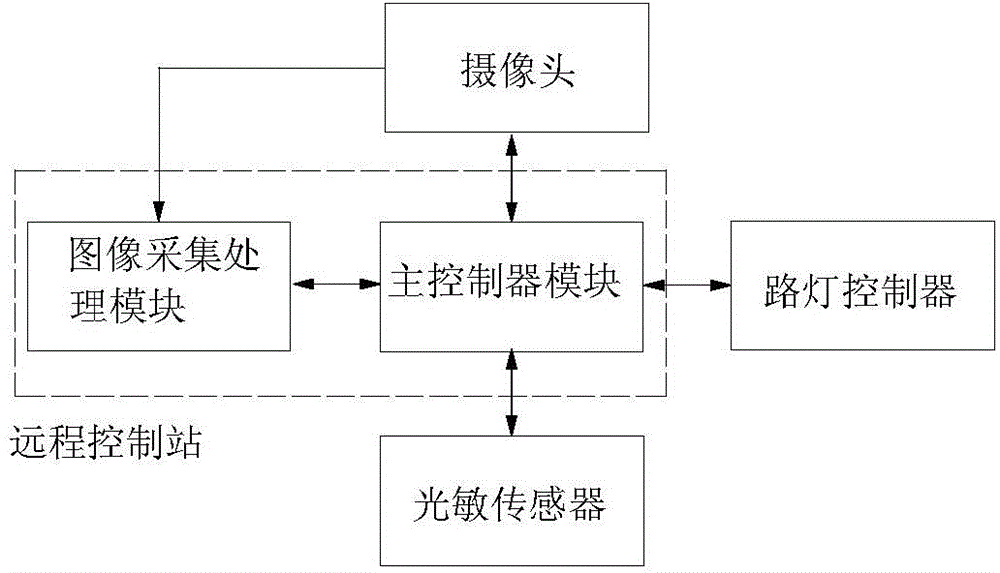
Innovation
- Design an automatic street light brightness adjustment system based on vision technology. Each street light brightness adjustment subsystem includes a photosensitive sensor, a camera and a remote control station. It analyzes pedestrian/vehicle movement directions through multi-camera target detection, recognition and tracking technology, using ZigBee and GPRS network carries out wireless communication to realize automatic adjustment of street light brightness, and unified monitoring and management through the information monitoring service center.


Energy Efficiency Standards for Smart Street Lighting
Energy efficiency standards for smart street lighting systems incorporating visual servoing technologies have emerged as critical regulatory frameworks governing the deployment of adaptive illumination solutions. These standards establish minimum performance thresholds for energy consumption, luminous efficacy, and operational efficiency while accommodating the dynamic nature of visual servoing-controlled lighting systems.
Current international standards, including IES LM-79 and EN 13201 series, are being revised to address the unique characteristics of adaptive lighting systems that utilize computer vision feedback mechanisms. These updated frameworks recognize that traditional static efficiency measurements inadequately capture the performance benefits of systems that continuously adjust illumination based on real-time visual data analysis.
The IEEE 1789 standard for LED flicker and the ANSI C136.37 standard for networked lighting control systems provide foundational requirements for visual servoing implementations. These standards mandate maximum allowable flicker rates and communication protocols that ensure visual sensors can accurately capture environmental data without interference from lighting system operations.
Energy efficiency metrics for adaptive street lighting now incorporate dynamic efficiency ratings that account for variable power consumption patterns. The new standards require systems to demonstrate minimum 40% energy savings compared to conventional lighting while maintaining photometric performance standards. Visual servoing systems must achieve these efficiency targets across diverse operational scenarios, including varying traffic densities and weather conditions.
Compliance testing protocols have been established to evaluate the energy performance of visual servoing-enabled lighting systems under standardized conditions. These protocols include assessment of sensor accuracy, response time optimization, and power management effectiveness during adaptive operations.
Emerging standards also address cybersecurity requirements for networked visual servoing systems, ensuring that energy efficiency optimizations do not compromise system security. The integration of visual feedback mechanisms must comply with data privacy regulations while maintaining optimal energy performance characteristics essential for sustainable urban lighting infrastructure.
Current international standards, including IES LM-79 and EN 13201 series, are being revised to address the unique characteristics of adaptive lighting systems that utilize computer vision feedback mechanisms. These updated frameworks recognize that traditional static efficiency measurements inadequately capture the performance benefits of systems that continuously adjust illumination based on real-time visual data analysis.
The IEEE 1789 standard for LED flicker and the ANSI C136.37 standard for networked lighting control systems provide foundational requirements for visual servoing implementations. These standards mandate maximum allowable flicker rates and communication protocols that ensure visual sensors can accurately capture environmental data without interference from lighting system operations.
Energy efficiency metrics for adaptive street lighting now incorporate dynamic efficiency ratings that account for variable power consumption patterns. The new standards require systems to demonstrate minimum 40% energy savings compared to conventional lighting while maintaining photometric performance standards. Visual servoing systems must achieve these efficiency targets across diverse operational scenarios, including varying traffic densities and weather conditions.
Compliance testing protocols have been established to evaluate the energy performance of visual servoing-enabled lighting systems under standardized conditions. These protocols include assessment of sensor accuracy, response time optimization, and power management effectiveness during adaptive operations.
Emerging standards also address cybersecurity requirements for networked visual servoing systems, ensuring that energy efficiency optimizations do not compromise system security. The integration of visual feedback mechanisms must comply with data privacy regulations while maintaining optimal energy performance characteristics essential for sustainable urban lighting infrastructure.
Environmental Impact of Adaptive Lighting Systems
Adaptive street lighting systems utilizing visual servoing technology present significant environmental advantages compared to conventional static lighting infrastructure. These systems fundamentally reduce energy consumption through intelligent brightness modulation based on real-time environmental conditions and pedestrian traffic patterns. By dynamically adjusting illumination levels, adaptive lighting can achieve energy savings of 30-50% compared to traditional street lighting, directly translating to reduced carbon emissions from power generation.
The implementation of LED technology in conjunction with visual servoing capabilities further amplifies environmental benefits. LEDs inherently consume 60-80% less energy than conventional sodium vapor lamps while maintaining superior light quality and longevity. When integrated with adaptive control systems, these fixtures can operate at optimal efficiency levels, extending operational lifespans from 10,000 hours to over 50,000 hours, thereby reducing manufacturing waste and replacement frequency.
Visual servoing-enabled lighting systems contribute to reduced light pollution through precise beam control and targeted illumination. Traditional street lighting often creates excessive sky glow and glare, disrupting nocturnal ecosystems and wildlife migration patterns. Adaptive systems can minimize upward light spillage by up to 85% through intelligent fixture positioning and intensity control, preserving natural darkness corridors essential for ecological balance.
The environmental impact extends to reduced infrastructure maintenance requirements. Smart lighting systems equipped with visual feedback mechanisms can predict component failures and optimize maintenance schedules, reducing service vehicle emissions and material waste. Predictive maintenance capabilities decrease unnecessary site visits by approximately 40%, contributing to lower transportation-related carbon footprints.
However, environmental considerations must account for the increased electronic complexity of adaptive systems. The integration of cameras, sensors, and processing units introduces additional manufacturing requirements and potential electronic waste concerns. The embedded computing systems require continuous operation, adding baseline power consumption that partially offsets lighting efficiency gains.
Lifecycle assessment studies indicate that despite higher initial environmental costs from manufacturing sophisticated control systems, adaptive street lighting achieves net positive environmental impact within 3-5 years of deployment. The cumulative energy savings and reduced maintenance requirements create substantial long-term environmental benefits, positioning visual servoing-enhanced adaptive lighting as a crucial technology for sustainable urban infrastructure development.
The implementation of LED technology in conjunction with visual servoing capabilities further amplifies environmental benefits. LEDs inherently consume 60-80% less energy than conventional sodium vapor lamps while maintaining superior light quality and longevity. When integrated with adaptive control systems, these fixtures can operate at optimal efficiency levels, extending operational lifespans from 10,000 hours to over 50,000 hours, thereby reducing manufacturing waste and replacement frequency.
Visual servoing-enabled lighting systems contribute to reduced light pollution through precise beam control and targeted illumination. Traditional street lighting often creates excessive sky glow and glare, disrupting nocturnal ecosystems and wildlife migration patterns. Adaptive systems can minimize upward light spillage by up to 85% through intelligent fixture positioning and intensity control, preserving natural darkness corridors essential for ecological balance.
The environmental impact extends to reduced infrastructure maintenance requirements. Smart lighting systems equipped with visual feedback mechanisms can predict component failures and optimize maintenance schedules, reducing service vehicle emissions and material waste. Predictive maintenance capabilities decrease unnecessary site visits by approximately 40%, contributing to lower transportation-related carbon footprints.
However, environmental considerations must account for the increased electronic complexity of adaptive systems. The integration of cameras, sensors, and processing units introduces additional manufacturing requirements and potential electronic waste concerns. The embedded computing systems require continuous operation, adding baseline power consumption that partially offsets lighting efficiency gains.
Lifecycle assessment studies indicate that despite higher initial environmental costs from manufacturing sophisticated control systems, adaptive street lighting achieves net positive environmental impact within 3-5 years of deployment. The cumulative energy savings and reduced maintenance requirements create substantial long-term environmental benefits, positioning visual servoing-enhanced adaptive lighting as a crucial technology for sustainable urban infrastructure development.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!