

Visual Servoing vs Acoustic Systems: Precision Assessment
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing vs Acoustic Systems Background and Objectives
Visual servoing and acoustic systems represent two distinct technological paradigms that have evolved to address precision control and positioning challenges across diverse industrial and research applications. Visual servoing emerged in the 1980s as a fusion of computer vision and robotics, leveraging real-time visual feedback to guide robotic systems with unprecedented accuracy. This technology has undergone significant evolution from basic template matching algorithms to sophisticated deep learning-based approaches that can handle complex dynamic environments.
Acoustic systems, conversely, have roots extending back to early sonar and ultrasonic technologies developed in the mid-20th century. These systems utilize sound wave propagation, reflection, and interference patterns to achieve precise measurements and control. The evolution of acoustic positioning has progressed from simple distance measurement tools to complex multi-transducer arrays capable of sub-millimeter precision in controlled environments.
The convergence of these technologies in precision assessment applications has become increasingly relevant as industries demand higher accuracy standards. Manufacturing sectors, particularly semiconductor fabrication and precision assembly, require positioning accuracies in the micrometer range. Medical robotics applications, including surgical navigation and minimally invasive procedures, similarly demand exceptional precision where human safety depends on system reliability.
The primary objective of comparing these technologies centers on establishing comprehensive performance benchmarks across multiple operational parameters. Precision assessment must consider not only static accuracy but also dynamic response characteristics, environmental robustness, and system integration complexity. Visual servoing systems typically excel in applications requiring complex spatial reasoning and object recognition, while acoustic systems demonstrate superior performance in environments where optical clarity is compromised.
Current technological trends indicate a growing interest in hybrid approaches that combine visual and acoustic modalities to overcome individual system limitations. The objective extends beyond simple performance comparison to identify optimal application domains and potential synergistic implementations. This assessment aims to provide quantitative frameworks for precision evaluation, considering factors such as measurement resolution, response time, environmental sensitivity, and computational requirements.
The strategic importance of this comparison lies in enabling informed technology selection for next-generation precision systems, ultimately advancing the state-of-the-art in automated control and measurement applications.
Acoustic systems, conversely, have roots extending back to early sonar and ultrasonic technologies developed in the mid-20th century. These systems utilize sound wave propagation, reflection, and interference patterns to achieve precise measurements and control. The evolution of acoustic positioning has progressed from simple distance measurement tools to complex multi-transducer arrays capable of sub-millimeter precision in controlled environments.
The convergence of these technologies in precision assessment applications has become increasingly relevant as industries demand higher accuracy standards. Manufacturing sectors, particularly semiconductor fabrication and precision assembly, require positioning accuracies in the micrometer range. Medical robotics applications, including surgical navigation and minimally invasive procedures, similarly demand exceptional precision where human safety depends on system reliability.
The primary objective of comparing these technologies centers on establishing comprehensive performance benchmarks across multiple operational parameters. Precision assessment must consider not only static accuracy but also dynamic response characteristics, environmental robustness, and system integration complexity. Visual servoing systems typically excel in applications requiring complex spatial reasoning and object recognition, while acoustic systems demonstrate superior performance in environments where optical clarity is compromised.
Current technological trends indicate a growing interest in hybrid approaches that combine visual and acoustic modalities to overcome individual system limitations. The objective extends beyond simple performance comparison to identify optimal application domains and potential synergistic implementations. This assessment aims to provide quantitative frameworks for precision evaluation, considering factors such as measurement resolution, response time, environmental sensitivity, and computational requirements.
The strategic importance of this comparison lies in enabling informed technology selection for next-generation precision systems, ultimately advancing the state-of-the-art in automated control and measurement applications.
Market Demand for High-Precision Positioning Systems
The global market for high-precision positioning systems is experiencing unprecedented growth driven by the convergence of automation, robotics, and Industry 4.0 initiatives across multiple sectors. Manufacturing industries are increasingly demanding sub-millimeter accuracy for assembly operations, quality control, and automated production lines, where both visual servoing and acoustic positioning systems play critical roles in achieving operational excellence.
Aerospace and defense applications represent a significant market segment requiring extreme precision for satellite positioning, missile guidance systems, and unmanned aerial vehicle navigation. These applications demand positioning accuracies often exceeding traditional mechanical systems, creating substantial opportunities for advanced visual and acoustic positioning technologies that can operate reliably in challenging environmental conditions.
The medical device industry has emerged as a rapidly expanding market for precision positioning systems, particularly in surgical robotics, medical imaging equipment, and laboratory automation. Minimally invasive surgical procedures require positioning systems capable of micrometer-level accuracy, while diagnostic equipment demands consistent repeatability for accurate patient assessments and treatment delivery.
Automotive manufacturing continues to drive substantial demand for high-precision positioning systems, especially with the rise of electric vehicle production and advanced driver assistance systems. Assembly line automation requires precise component placement, welding operations, and quality inspection processes that rely heavily on both visual feedback and acoustic measurement systems for optimal performance.
The semiconductor industry represents one of the most demanding markets for ultra-high precision positioning, where nanometer-level accuracy is essential for wafer processing, chip manufacturing, and testing equipment. This sector's stringent requirements push the boundaries of both visual servoing and acoustic positioning technologies, driving continuous innovation and market expansion.
Emerging applications in renewable energy, particularly solar panel manufacturing and wind turbine assembly, are creating new market opportunities for precision positioning systems. These industries require cost-effective solutions that maintain high accuracy while operating in diverse environmental conditions, presenting unique challenges for system designers and technology providers.
Research institutions and academic laboratories constitute a growing market segment seeking versatile, high-precision positioning systems for scientific experiments, materials testing, and prototype development. This market values flexibility and customization capabilities alongside precision performance, often serving as early adopters of innovative positioning technologies.
Aerospace and defense applications represent a significant market segment requiring extreme precision for satellite positioning, missile guidance systems, and unmanned aerial vehicle navigation. These applications demand positioning accuracies often exceeding traditional mechanical systems, creating substantial opportunities for advanced visual and acoustic positioning technologies that can operate reliably in challenging environmental conditions.
The medical device industry has emerged as a rapidly expanding market for precision positioning systems, particularly in surgical robotics, medical imaging equipment, and laboratory automation. Minimally invasive surgical procedures require positioning systems capable of micrometer-level accuracy, while diagnostic equipment demands consistent repeatability for accurate patient assessments and treatment delivery.
Automotive manufacturing continues to drive substantial demand for high-precision positioning systems, especially with the rise of electric vehicle production and advanced driver assistance systems. Assembly line automation requires precise component placement, welding operations, and quality inspection processes that rely heavily on both visual feedback and acoustic measurement systems for optimal performance.
The semiconductor industry represents one of the most demanding markets for ultra-high precision positioning, where nanometer-level accuracy is essential for wafer processing, chip manufacturing, and testing equipment. This sector's stringent requirements push the boundaries of both visual servoing and acoustic positioning technologies, driving continuous innovation and market expansion.
Emerging applications in renewable energy, particularly solar panel manufacturing and wind turbine assembly, are creating new market opportunities for precision positioning systems. These industries require cost-effective solutions that maintain high accuracy while operating in diverse environmental conditions, presenting unique challenges for system designers and technology providers.
Research institutions and academic laboratories constitute a growing market segment seeking versatile, high-precision positioning systems for scientific experiments, materials testing, and prototype development. This market values flexibility and customization capabilities alongside precision performance, often serving as early adopters of innovative positioning technologies.
Current State and Challenges of Visual-Acoustic Positioning
Visual-acoustic positioning systems represent a convergence of two distinct sensing modalities, each offering unique advantages and facing specific limitations in precision applications. Current visual servoing systems have achieved remarkable maturity in controlled environments, with sub-millimeter accuracy demonstrated in industrial automation and robotic assembly tasks. These systems leverage advanced computer vision algorithms, including deep learning-based object detection and real-time image processing, to provide high-resolution spatial feedback.
However, visual systems encounter significant challenges in dynamic lighting conditions, occlusion scenarios, and environments with limited visual features. The dependency on line-of-sight operation restricts their applicability in complex three-dimensional spaces where obstacles may interrupt the visual feedback loop. Additionally, computational overhead for real-time image processing remains a bottleneck for high-speed applications requiring microsecond-level response times.
Acoustic positioning systems, conversely, demonstrate superior performance in non-line-of-sight scenarios and maintain consistent operation across varying environmental conditions. Ultrasonic and acoustic beacon-based systems can achieve centimeter-level accuracy in indoor environments, with recent advances in time-of-flight and phase-based measurement techniques pushing precision boundaries further. These systems excel in applications where visual occlusion is prevalent or where electromagnetic interference affects other sensing modalities.
The primary challenges facing acoustic systems include susceptibility to environmental noise, temperature-dependent sound velocity variations, and multipath interference in reflective environments. Signal attenuation and dispersion limit effective operating ranges, while acoustic shadowing effects can create dead zones in complex geometries. Furthermore, the relatively lower update rates compared to visual systems constrain their application in high-speed dynamic scenarios.
Integration challenges emerge when attempting to combine visual and acoustic modalities for enhanced positioning accuracy. Sensor fusion algorithms must address temporal synchronization issues, coordinate frame alignment, and conflicting measurements from different sensing principles. The heterogeneous nature of visual and acoustic data requires sophisticated filtering techniques to extract optimal positioning estimates while maintaining real-time performance requirements.
Current research focuses on developing hybrid architectures that leverage the complementary strengths of both modalities while mitigating individual weaknesses through intelligent switching mechanisms and adaptive weighting strategies.
However, visual systems encounter significant challenges in dynamic lighting conditions, occlusion scenarios, and environments with limited visual features. The dependency on line-of-sight operation restricts their applicability in complex three-dimensional spaces where obstacles may interrupt the visual feedback loop. Additionally, computational overhead for real-time image processing remains a bottleneck for high-speed applications requiring microsecond-level response times.
Acoustic positioning systems, conversely, demonstrate superior performance in non-line-of-sight scenarios and maintain consistent operation across varying environmental conditions. Ultrasonic and acoustic beacon-based systems can achieve centimeter-level accuracy in indoor environments, with recent advances in time-of-flight and phase-based measurement techniques pushing precision boundaries further. These systems excel in applications where visual occlusion is prevalent or where electromagnetic interference affects other sensing modalities.
The primary challenges facing acoustic systems include susceptibility to environmental noise, temperature-dependent sound velocity variations, and multipath interference in reflective environments. Signal attenuation and dispersion limit effective operating ranges, while acoustic shadowing effects can create dead zones in complex geometries. Furthermore, the relatively lower update rates compared to visual systems constrain their application in high-speed dynamic scenarios.
Integration challenges emerge when attempting to combine visual and acoustic modalities for enhanced positioning accuracy. Sensor fusion algorithms must address temporal synchronization issues, coordinate frame alignment, and conflicting measurements from different sensing principles. The heterogeneous nature of visual and acoustic data requires sophisticated filtering techniques to extract optimal positioning estimates while maintaining real-time performance requirements.
Current research focuses on developing hybrid architectures that leverage the complementary strengths of both modalities while mitigating individual weaknesses through intelligent switching mechanisms and adaptive weighting strategies.
Existing Precision Assessment Solutions and Methods
01 Visual servoing control systems for robotic manipulation
Visual servoing techniques utilize camera feedback to control robotic systems with high precision. These methods process visual information in real-time to guide robotic arms or manipulators to desired positions and orientations. The systems employ image processing algorithms to extract features and calculate control commands, enabling accurate positioning and trajectory tracking in dynamic environments.- Visual servoing control methods for robotic systems: Visual servoing techniques utilize camera feedback to control robotic manipulators and automated systems with high precision. These methods process visual information in real-time to guide robot movements, enabling accurate positioning and trajectory tracking. Image-based and position-based visual servoing approaches are employed to achieve precise control by minimizing errors between desired and actual visual features.
- Acoustic positioning and localization systems: Acoustic systems employ sound waves and ultrasonic signals for precise positioning and localization in various applications. These systems utilize time-of-flight measurements, phase detection, and signal processing algorithms to determine spatial coordinates with high accuracy. Multiple acoustic sensors and beamforming techniques enhance positioning precision in challenging environments.
- Sensor fusion for enhanced precision control: Integration of visual and acoustic sensing modalities provides complementary information for improved system precision. Sensor fusion algorithms combine data from cameras, microphones, and other sensors to overcome individual sensor limitations. This multi-modal approach enhances robustness and accuracy in navigation, tracking, and control applications under varying environmental conditions.
- Real-time signal processing and calibration techniques: Advanced signal processing methods enable real-time analysis of visual and acoustic data for precision applications. Calibration procedures compensate for sensor errors, environmental disturbances, and system uncertainties. Adaptive filtering, noise reduction, and error correction algorithms maintain high accuracy during dynamic operations and changing conditions.
- Applications in autonomous navigation and industrial automation: Visual servoing and acoustic systems are applied in autonomous vehicles, drones, and industrial robots for precise navigation and manipulation tasks. These technologies enable automated inspection, assembly operations, and quality control with minimal human intervention. Integration with artificial intelligence and machine learning further enhances adaptability and performance in complex operational scenarios.
02 Acoustic positioning and localization systems
Acoustic systems employ sound waves for precise positioning and localization in various applications. These systems utilize ultrasonic or audible frequency signals to determine spatial coordinates and distances. Signal processing techniques analyze acoustic reflections, time-of-flight measurements, and phase differences to achieve high-precision positioning, particularly useful in environments where visual methods are limited.Expand Specific Solutions03 Integration of visual and acoustic sensor fusion
Combining visual and acoustic sensing modalities enhances overall system precision and robustness. Sensor fusion algorithms integrate data from cameras and acoustic sensors to compensate for individual sensor limitations. This multi-modal approach improves accuracy in challenging conditions such as poor lighting or acoustic interference, providing redundancy and increased reliability for precision applications.Expand Specific Solutions04 Precision calibration and error compensation methods
Advanced calibration techniques are essential for achieving high precision in visual servoing and acoustic systems. These methods address systematic errors, sensor misalignment, and environmental factors that affect measurement accuracy. Calibration procedures involve mathematical modeling, parameter estimation, and adaptive compensation algorithms to minimize positioning errors and improve system performance over time.Expand Specific Solutions05 Real-time processing and control algorithms
High-speed computational algorithms enable real-time processing of visual and acoustic data for precision control applications. These algorithms optimize processing pipelines, implement parallel computing techniques, and utilize machine learning methods to reduce latency and improve response times. The systems achieve closed-loop control with minimal delay, essential for dynamic applications requiring immediate feedback and adjustment.Expand Specific Solutions
Key Players in Visual Servoing and Acoustic Systems Industry
The visual servoing versus acoustic systems precision assessment represents a rapidly evolving technological landscape at the intersection of computer vision and audio processing. The industry is in a mature growth phase, with established technology giants like Samsung Electronics, Sony Group, Intel, and Microsoft Technology Licensing driving innovation alongside specialized firms such as SoundHound AI and Misapplied Sciences. The market demonstrates significant scale, supported by telecommunications leaders including NTT and Royal KPN, while academic institutions like Zhejiang University, Shanghai Jiao Tong University, and Harbin Institute of Technology contribute fundamental research. Technology maturity varies considerably across applications, with companies like DeepMind Technologies and Meta Platforms Technologies pushing AI-enhanced precision boundaries, while traditional players such as Siemens, Panasonic Holdings, and Fluke Corporation focus on industrial implementation and measurement standards.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung has developed integrated visual servoing and acoustic systems primarily for their consumer electronics and mobile device portfolios. Their visual servoing technology utilizes advanced image processing chips capable of tracking multiple objects simultaneously with millisecond response times. The acoustic component features sophisticated beamforming algorithms that can isolate and track sound sources in noisy environments with accuracy within 3 degrees. Samsung's approach emphasizes power efficiency and miniaturization, making their solutions suitable for battery-powered devices while maintaining competitive precision levels. Their systems are optimized for consumer applications but show potential for industrial adaptation.
Strengths: Excellent power efficiency, strong miniaturization capabilities, cost-effective mass production. Weaknesses: Limited industrial-grade robustness, primarily consumer-focused development approach.
Sony Group Corp.
Technical Solution: Sony has pioneered precision visual servoing systems in their professional camera equipment and robotics divisions, incorporating advanced CMOS sensors with pixel-level accuracy tracking capabilities. Their acoustic systems leverage decades of audio engineering expertise, featuring proprietary algorithms for sound source localization with precision better than 2 degrees in azimuth. The company's unique approach combines their imaging sensor technology with spatial audio processing, creating hybrid systems that can switch between visual and acoustic modes based on environmental conditions. Their solutions are particularly effective in entertainment and broadcast applications where both visual tracking and audio positioning are critical.
Strengths: World-class sensor technology, extensive audio engineering expertise, proven reliability in professional applications. Weaknesses: Higher cost compared to competitors, limited focus on industrial automation markets.
Core Technologies in Visual-Acoustic Precision Measurement
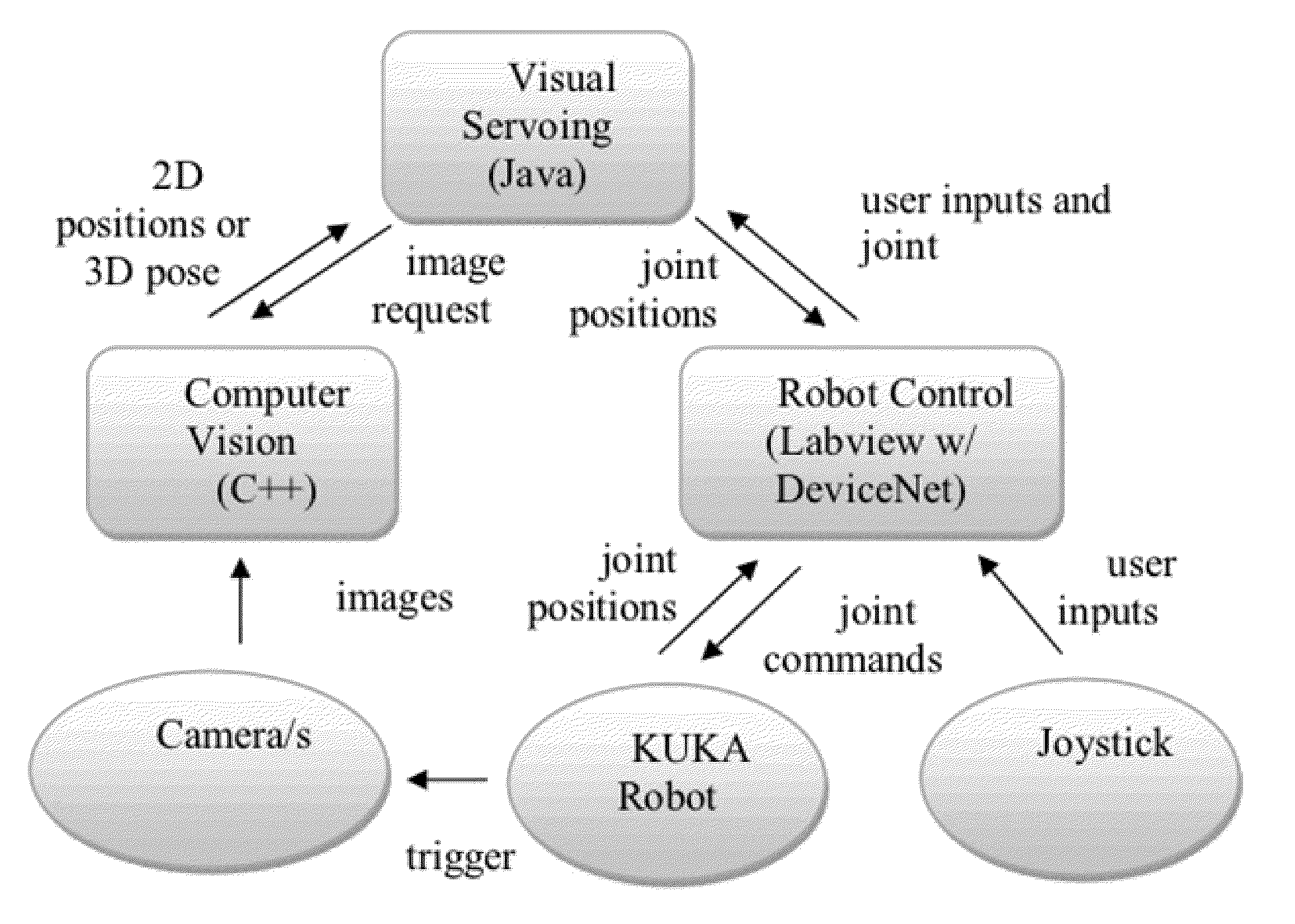
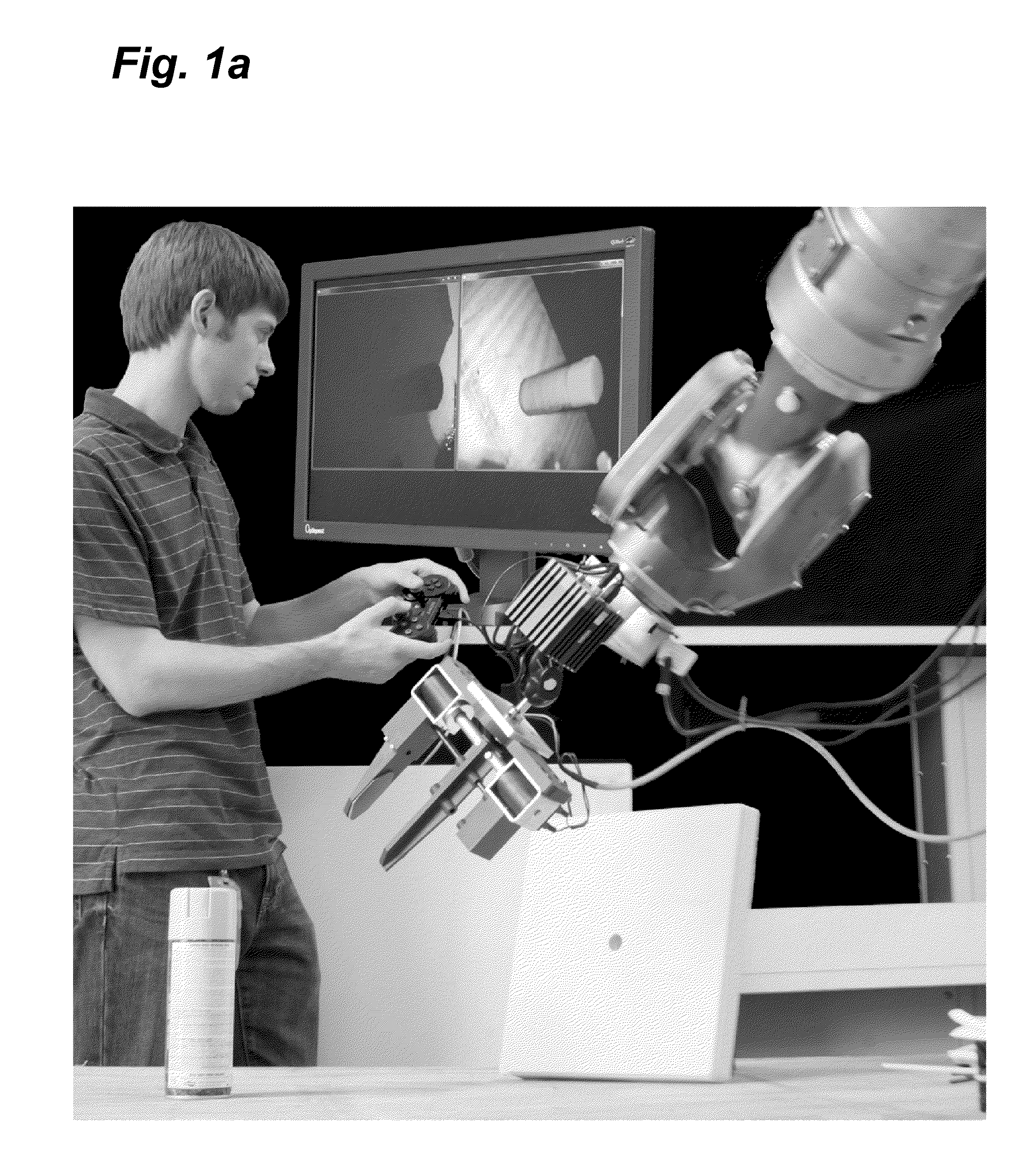
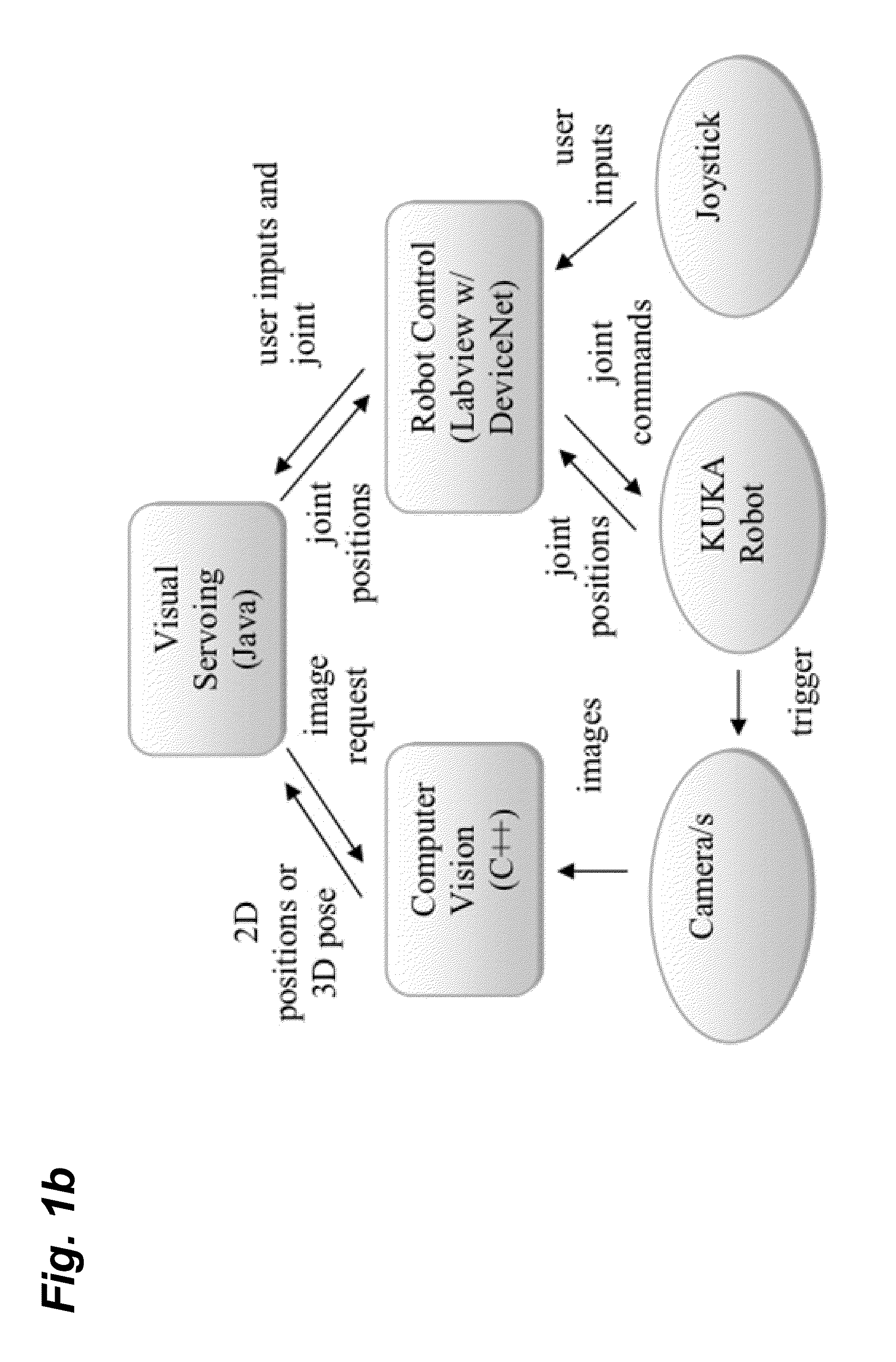
Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Visual servoing
PatentInactiveGB2521429A
Innovation
- A light-field camera system with a micro-lens array and polarizing means is used, where each micro-lens has a different polarization direction, enabling the identification and exclusion of specular reflections by comparing micro-images across different polarizations, and modifying the error image to improve actuator control, thereby enhancing guidance accuracy and depth-of-field.




Standardization and Calibration Requirements for Precision Systems
The establishment of standardization and calibration requirements for precision systems represents a critical foundation for ensuring reliable performance comparison between visual servoing and acoustic positioning technologies. Current industry practices reveal significant disparities in measurement protocols, with visual systems typically adhering to ISO 9283 robotic accuracy standards while acoustic systems often follow telecommunications-based ITU-T recommendations, creating challenges for direct performance assessment.
Calibration methodologies for visual servoing systems require comprehensive camera intrinsic and extrinsic parameter determination, including lens distortion correction, focal length verification, and coordinate system transformation accuracy. Standard calibration targets such as checkerboard patterns or circular grids must maintain dimensional tolerances within ±0.01mm for sub-millimeter precision applications. Environmental factors including lighting conditions, temperature variations, and vibration effects necessitate periodic recalibration cycles, typically recommended at 30-day intervals for industrial applications.
Acoustic system calibration presents unique challenges due to environmental sensitivity and propagation medium variations. Temperature compensation algorithms must account for sound velocity changes of approximately 0.6 m/s per degree Celsius, while humidity and atmospheric pressure corrections require real-time monitoring capabilities. Reference microphone arrays demand positioning accuracy within ±0.1mm, with frequency response calibration across operational bandwidths using certified acoustic sources traceable to national standards.
Standardized test environments should incorporate controlled atmospheric conditions, electromagnetic interference shielding, and vibration isolation platforms meeting ISO 14253 specifications. Measurement uncertainty budgets must account for systematic and random error sources, with traceability chains extending to primary measurement standards. Cross-validation protocols between visual and acoustic systems require common reference artifacts, such as precision-machined targets with known geometric properties and retroreflective markers for simultaneous optical and acoustic detection.
Emerging international standards development focuses on unified precision assessment frameworks, incorporating statistical analysis methods for repeatability and reproducibility studies. These frameworks emphasize measurement system capability indices and gauge repeatability studies, enabling objective performance comparison across different sensing modalities while maintaining metrological traceability and measurement confidence levels appropriate for industrial precision applications.
Calibration methodologies for visual servoing systems require comprehensive camera intrinsic and extrinsic parameter determination, including lens distortion correction, focal length verification, and coordinate system transformation accuracy. Standard calibration targets such as checkerboard patterns or circular grids must maintain dimensional tolerances within ±0.01mm for sub-millimeter precision applications. Environmental factors including lighting conditions, temperature variations, and vibration effects necessitate periodic recalibration cycles, typically recommended at 30-day intervals for industrial applications.
Acoustic system calibration presents unique challenges due to environmental sensitivity and propagation medium variations. Temperature compensation algorithms must account for sound velocity changes of approximately 0.6 m/s per degree Celsius, while humidity and atmospheric pressure corrections require real-time monitoring capabilities. Reference microphone arrays demand positioning accuracy within ±0.1mm, with frequency response calibration across operational bandwidths using certified acoustic sources traceable to national standards.
Standardized test environments should incorporate controlled atmospheric conditions, electromagnetic interference shielding, and vibration isolation platforms meeting ISO 14253 specifications. Measurement uncertainty budgets must account for systematic and random error sources, with traceability chains extending to primary measurement standards. Cross-validation protocols between visual and acoustic systems require common reference artifacts, such as precision-machined targets with known geometric properties and retroreflective markers for simultaneous optical and acoustic detection.
Emerging international standards development focuses on unified precision assessment frameworks, incorporating statistical analysis methods for repeatability and reproducibility studies. These frameworks emphasize measurement system capability indices and gauge repeatability studies, enabling objective performance comparison across different sensing modalities while maintaining metrological traceability and measurement confidence levels appropriate for industrial precision applications.
Environmental Factors Impact on Visual-Acoustic System Performance
Environmental conditions significantly influence the performance characteristics of both visual servoing and acoustic positioning systems, creating distinct operational challenges that must be carefully evaluated when assessing precision capabilities. The interaction between environmental variables and system performance often determines the practical viability of each technology in real-world applications.
Lighting conditions represent the most critical environmental factor affecting visual servoing systems. Variations in illumination intensity, color temperature, and directional lighting can dramatically impact image quality and feature detection accuracy. Low-light environments reduce camera sensitivity and increase noise levels, while excessive brightness can cause saturation and loss of detail. Dynamic lighting changes, such as shadows moving across the workspace or flickering artificial lights, introduce temporal inconsistencies that challenge real-time tracking algorithms.
Acoustic systems face their own set of environmental challenges, primarily related to sound propagation characteristics. Temperature variations affect sound velocity, introducing systematic errors in distance calculations if not properly compensated. Humidity levels influence acoustic absorption and scattering, particularly at higher frequencies. Air pressure changes, though typically minimal in controlled environments, can also impact sound transmission properties and system calibration accuracy.
Electromagnetic interference presents a significant concern for both system types, though manifesting differently. Visual systems may experience interference in their electronic components and data transmission pathways, while acoustic systems can suffer from electrical noise affecting transducer performance and signal processing circuits. Industrial environments with heavy machinery, wireless communications, or power systems often generate substantial electromagnetic disturbances.
Physical obstructions create operational limitations that vary between technologies. Visual servoing requires clear line-of-sight between cameras and target objects, making it vulnerable to temporary occlusions from moving equipment, personnel, or environmental debris. Acoustic systems, while capable of some obstacle penetration, face challenges from sound-absorbing materials, reflective surfaces that create multipath interference, and physical barriers that block direct acoustic transmission.
Vibration and mechanical disturbances affect system stability and measurement precision differently across technologies. Camera-based systems may experience image blur and mounting instability, while acoustic transducers can suffer from mechanical coupling that introduces noise into measurements. Environmental vibrations from nearby machinery or structural movements require careful isolation strategies for both system types.
Temperature fluctuations impact electronic component performance, calibration stability, and measurement accuracy. Thermal expansion of mechanical components can alter system geometry, while temperature-dependent electronic drift affects sensor precision and processing algorithms. Both visual and acoustic systems require thermal management strategies to maintain consistent performance across varying environmental conditions.
Lighting conditions represent the most critical environmental factor affecting visual servoing systems. Variations in illumination intensity, color temperature, and directional lighting can dramatically impact image quality and feature detection accuracy. Low-light environments reduce camera sensitivity and increase noise levels, while excessive brightness can cause saturation and loss of detail. Dynamic lighting changes, such as shadows moving across the workspace or flickering artificial lights, introduce temporal inconsistencies that challenge real-time tracking algorithms.
Acoustic systems face their own set of environmental challenges, primarily related to sound propagation characteristics. Temperature variations affect sound velocity, introducing systematic errors in distance calculations if not properly compensated. Humidity levels influence acoustic absorption and scattering, particularly at higher frequencies. Air pressure changes, though typically minimal in controlled environments, can also impact sound transmission properties and system calibration accuracy.
Electromagnetic interference presents a significant concern for both system types, though manifesting differently. Visual systems may experience interference in their electronic components and data transmission pathways, while acoustic systems can suffer from electrical noise affecting transducer performance and signal processing circuits. Industrial environments with heavy machinery, wireless communications, or power systems often generate substantial electromagnetic disturbances.
Physical obstructions create operational limitations that vary between technologies. Visual servoing requires clear line-of-sight between cameras and target objects, making it vulnerable to temporary occlusions from moving equipment, personnel, or environmental debris. Acoustic systems, while capable of some obstacle penetration, face challenges from sound-absorbing materials, reflective surfaces that create multipath interference, and physical barriers that block direct acoustic transmission.
Vibration and mechanical disturbances affect system stability and measurement precision differently across technologies. Camera-based systems may experience image blur and mounting instability, while acoustic transducers can suffer from mechanical coupling that introduces noise into measurements. Environmental vibrations from nearby machinery or structural movements require careful isolation strategies for both system types.
Temperature fluctuations impact electronic component performance, calibration stability, and measurement accuracy. Thermal expansion of mechanical components can alter system geometry, while temperature-dependent electronic drift affects sensor precision and processing algorithms. Both visual and acoustic systems require thermal management strategies to maintain consistent performance across varying environmental conditions.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!