

Optimizing Visual Servoing for Border Security Technologies
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing Border Security Tech Background and Goals
Visual servoing technology has emerged as a critical component in modern border security systems, representing the convergence of computer vision, robotics, and automated surveillance technologies. This field encompasses the use of visual feedback to control robotic systems and automated platforms for real-time monitoring, tracking, and response capabilities along international boundaries and sensitive perimeters.
The evolution of visual servoing in border security applications traces back to the early 2000s when basic camera-guided systems were first deployed for perimeter monitoring. Initial implementations relied on static camera networks with limited automation capabilities. The technology has since progressed through several distinct phases, incorporating advanced machine learning algorithms, multi-spectral imaging, and autonomous vehicle integration.
Current technological trends indicate a shift toward intelligent, adaptive systems capable of operating in diverse environmental conditions. These systems integrate thermal imaging, night vision capabilities, and weather-resistant hardware to maintain operational effectiveness across varying climatic and lighting conditions. The incorporation of artificial intelligence and deep learning algorithms has significantly enhanced target recognition accuracy and reduced false alarm rates.
The primary technical objectives for optimizing visual servoing in border security applications center on achieving real-time autonomous tracking of multiple targets across extensive geographical areas. Key performance goals include maintaining tracking accuracy above 95% under adverse weather conditions, reducing response time to detected intrusions to under 30 seconds, and enabling seamless handoff between multiple surveillance platforms.
Enhanced situational awareness represents another fundamental goal, requiring the integration of multiple sensor modalities with visual servoing systems. This includes the fusion of radar, lidar, and acoustic sensors to create comprehensive threat assessment capabilities. The technology aims to distinguish between legitimate activities and potential security threats through advanced behavioral analysis algorithms.
Scalability and interoperability objectives focus on developing modular systems capable of integration with existing border security infrastructure. This includes compatibility with command and control centers, communication networks, and legacy surveillance equipment. The goal is to create unified platforms that can coordinate multiple autonomous units while maintaining centralized oversight and control capabilities.
Future technical targets emphasize the development of predictive capabilities, enabling systems to anticipate potential breach attempts based on historical data patterns and real-time environmental analysis. These advanced systems aim to transition from reactive to proactive security postures, significantly enhancing border protection effectiveness while optimizing resource allocation and operational costs.
The evolution of visual servoing in border security applications traces back to the early 2000s when basic camera-guided systems were first deployed for perimeter monitoring. Initial implementations relied on static camera networks with limited automation capabilities. The technology has since progressed through several distinct phases, incorporating advanced machine learning algorithms, multi-spectral imaging, and autonomous vehicle integration.
Current technological trends indicate a shift toward intelligent, adaptive systems capable of operating in diverse environmental conditions. These systems integrate thermal imaging, night vision capabilities, and weather-resistant hardware to maintain operational effectiveness across varying climatic and lighting conditions. The incorporation of artificial intelligence and deep learning algorithms has significantly enhanced target recognition accuracy and reduced false alarm rates.
The primary technical objectives for optimizing visual servoing in border security applications center on achieving real-time autonomous tracking of multiple targets across extensive geographical areas. Key performance goals include maintaining tracking accuracy above 95% under adverse weather conditions, reducing response time to detected intrusions to under 30 seconds, and enabling seamless handoff between multiple surveillance platforms.
Enhanced situational awareness represents another fundamental goal, requiring the integration of multiple sensor modalities with visual servoing systems. This includes the fusion of radar, lidar, and acoustic sensors to create comprehensive threat assessment capabilities. The technology aims to distinguish between legitimate activities and potential security threats through advanced behavioral analysis algorithms.
Scalability and interoperability objectives focus on developing modular systems capable of integration with existing border security infrastructure. This includes compatibility with command and control centers, communication networks, and legacy surveillance equipment. The goal is to create unified platforms that can coordinate multiple autonomous units while maintaining centralized oversight and control capabilities.
Future technical targets emphasize the development of predictive capabilities, enabling systems to anticipate potential breach attempts based on historical data patterns and real-time environmental analysis. These advanced systems aim to transition from reactive to proactive security postures, significantly enhancing border protection effectiveness while optimizing resource allocation and operational costs.
Market Demand for Automated Border Surveillance Systems
The global border security market has experienced unprecedented growth driven by escalating geopolitical tensions, increased migration flows, and evolving security threats. Traditional manual surveillance methods have proven inadequate for monitoring vast border territories, creating substantial demand for automated solutions that can operate continuously across diverse environmental conditions.
Government agencies worldwide are prioritizing investments in advanced surveillance technologies to address critical gaps in border monitoring capabilities. The need for real-time threat detection, automated tracking of suspicious activities, and seamless integration with existing security infrastructure has become paramount. Visual servoing technologies offer compelling solutions by enabling autonomous camera systems to maintain optimal tracking of targets while adapting to dynamic environmental conditions.
The market demand is particularly pronounced in regions with extensive land borders, coastal areas, and critical infrastructure zones. Border patrol agencies require systems capable of distinguishing between legitimate activities and potential security threats while minimizing false alarms that strain operational resources. Automated surveillance systems incorporating visual servoing can significantly reduce the human workload while improving detection accuracy and response times.
Economic factors further drive market adoption as automated systems offer long-term cost advantages compared to traditional patrol methods. The ability to cover larger areas with fewer personnel while maintaining consistent surveillance quality presents attractive value propositions for budget-conscious agencies. Additionally, the integration of artificial intelligence and machine learning capabilities enhances system effectiveness over time through adaptive learning mechanisms.
Technological convergence has created favorable conditions for visual servoing applications in border security. The proliferation of high-resolution imaging sensors, improved processing capabilities, and robust communication networks enables deployment of sophisticated automated surveillance solutions in previously challenging environments. Market demand continues expanding as agencies recognize the strategic advantages of proactive, technology-driven border security approaches over reactive traditional methods.
Government agencies worldwide are prioritizing investments in advanced surveillance technologies to address critical gaps in border monitoring capabilities. The need for real-time threat detection, automated tracking of suspicious activities, and seamless integration with existing security infrastructure has become paramount. Visual servoing technologies offer compelling solutions by enabling autonomous camera systems to maintain optimal tracking of targets while adapting to dynamic environmental conditions.
The market demand is particularly pronounced in regions with extensive land borders, coastal areas, and critical infrastructure zones. Border patrol agencies require systems capable of distinguishing between legitimate activities and potential security threats while minimizing false alarms that strain operational resources. Automated surveillance systems incorporating visual servoing can significantly reduce the human workload while improving detection accuracy and response times.
Economic factors further drive market adoption as automated systems offer long-term cost advantages compared to traditional patrol methods. The ability to cover larger areas with fewer personnel while maintaining consistent surveillance quality presents attractive value propositions for budget-conscious agencies. Additionally, the integration of artificial intelligence and machine learning capabilities enhances system effectiveness over time through adaptive learning mechanisms.
Technological convergence has created favorable conditions for visual servoing applications in border security. The proliferation of high-resolution imaging sensors, improved processing capabilities, and robust communication networks enables deployment of sophisticated automated surveillance solutions in previously challenging environments. Market demand continues expanding as agencies recognize the strategic advantages of proactive, technology-driven border security approaches over reactive traditional methods.
Current State and Challenges of Visual Servoing in Security
Visual servoing technology in border security applications has reached a significant level of maturity, with numerous systems deployed across international boundaries worldwide. Current implementations primarily utilize fixed-position camera networks integrated with automated tracking algorithms to monitor perimeter zones, detect unauthorized crossings, and guide robotic patrol units. These systems demonstrate robust performance in controlled environments with adequate lighting and minimal environmental interference.
The technology landscape is dominated by hybrid approaches combining traditional computer vision techniques with emerging deep learning methodologies. Established solutions rely heavily on feature-based tracking algorithms, optical flow calculations, and geometric pose estimation to maintain target lock and execute precise camera movements. Modern deployments increasingly incorporate convolutional neural networks for object detection and classification, enabling more sophisticated threat assessment capabilities.
However, several critical challenges continue to impede optimal performance in real-world border security scenarios. Environmental variability represents the most significant obstacle, as visual servoing systems must operate effectively across diverse weather conditions, lighting variations, and seasonal changes. Dust storms, fog, rain, and extreme temperature fluctuations can severely degrade camera sensor performance and compromise tracking accuracy.
Latency issues pose another substantial challenge, particularly in scenarios requiring rapid response to fast-moving targets. Current systems often struggle with processing delays between target detection, trajectory prediction, and actuator response, resulting in tracking failures during critical moments. Network communication delays between distributed sensor nodes and central control systems further exacerbate these timing constraints.
The dynamic nature of border environments introduces additional complexity through false positive generation. Wildlife movement, vegetation motion, and legitimate civilian activities frequently trigger unnecessary system responses, leading to resource waste and reduced operator confidence. Distinguishing between genuine security threats and benign environmental activity remains a persistent technical hurdle.
Scalability limitations also constrain widespread deployment effectiveness. Current visual servoing architectures often require extensive manual calibration and site-specific parameter tuning, making large-scale implementation costly and time-intensive. Integration challenges between legacy security infrastructure and modern visual servoing components create additional deployment barriers.
Furthermore, adversarial conditions present emerging concerns as potential intruders develop countermeasures specifically designed to exploit visual system vulnerabilities. Camouflage techniques, infrared signature masking, and deliberate sensor blinding attempts require increasingly sophisticated detection and mitigation strategies.
The technology landscape is dominated by hybrid approaches combining traditional computer vision techniques with emerging deep learning methodologies. Established solutions rely heavily on feature-based tracking algorithms, optical flow calculations, and geometric pose estimation to maintain target lock and execute precise camera movements. Modern deployments increasingly incorporate convolutional neural networks for object detection and classification, enabling more sophisticated threat assessment capabilities.
However, several critical challenges continue to impede optimal performance in real-world border security scenarios. Environmental variability represents the most significant obstacle, as visual servoing systems must operate effectively across diverse weather conditions, lighting variations, and seasonal changes. Dust storms, fog, rain, and extreme temperature fluctuations can severely degrade camera sensor performance and compromise tracking accuracy.
Latency issues pose another substantial challenge, particularly in scenarios requiring rapid response to fast-moving targets. Current systems often struggle with processing delays between target detection, trajectory prediction, and actuator response, resulting in tracking failures during critical moments. Network communication delays between distributed sensor nodes and central control systems further exacerbate these timing constraints.
The dynamic nature of border environments introduces additional complexity through false positive generation. Wildlife movement, vegetation motion, and legitimate civilian activities frequently trigger unnecessary system responses, leading to resource waste and reduced operator confidence. Distinguishing between genuine security threats and benign environmental activity remains a persistent technical hurdle.
Scalability limitations also constrain widespread deployment effectiveness. Current visual servoing architectures often require extensive manual calibration and site-specific parameter tuning, making large-scale implementation costly and time-intensive. Integration challenges between legacy security infrastructure and modern visual servoing components create additional deployment barriers.
Furthermore, adversarial conditions present emerging concerns as potential intruders develop countermeasures specifically designed to exploit visual system vulnerabilities. Camouflage techniques, infrared signature masking, and deliberate sensor blinding attempts require increasingly sophisticated detection and mitigation strategies.
Existing Visual Servoing Solutions for Border Applications
01 Image-based visual servoing control methods
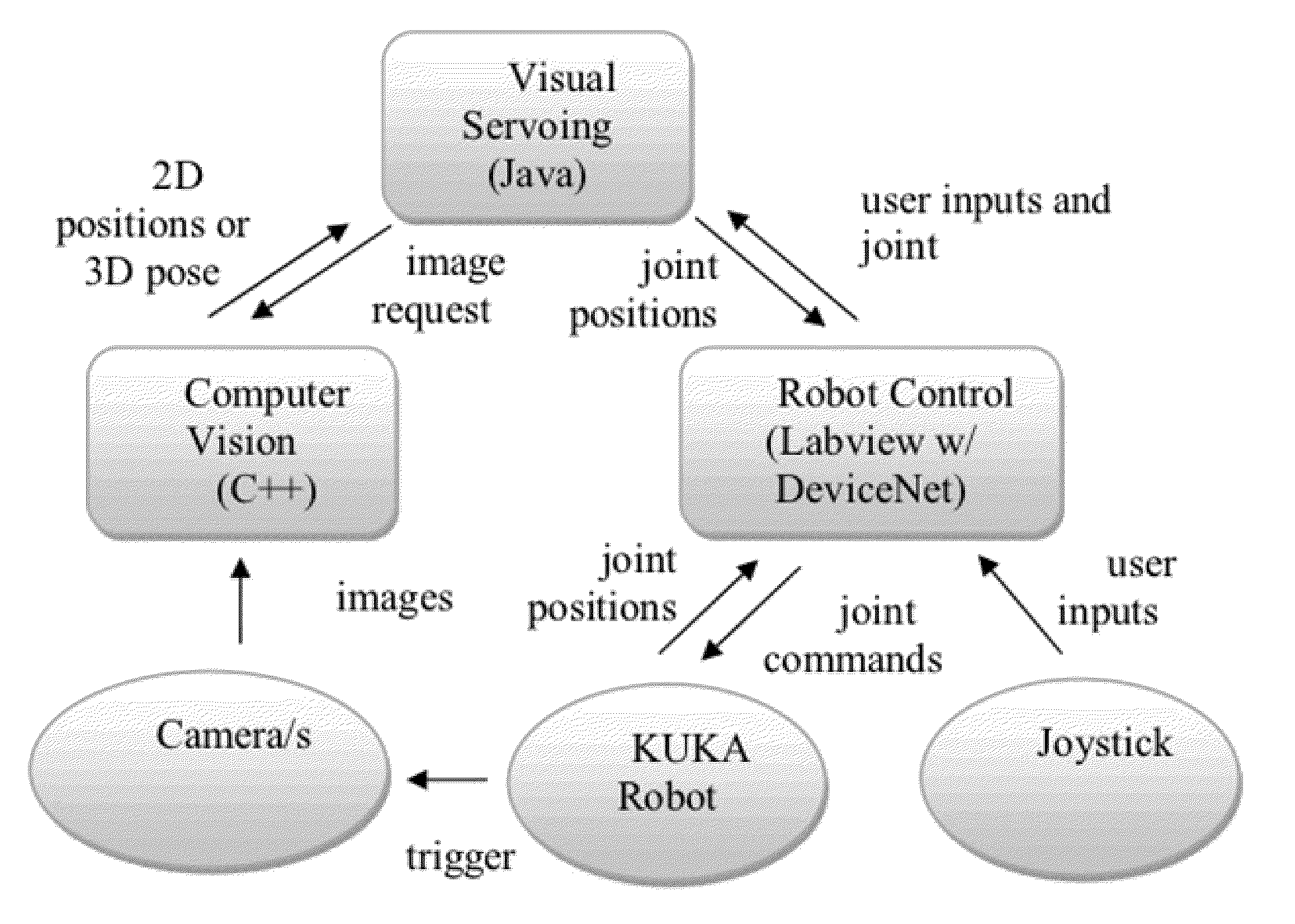
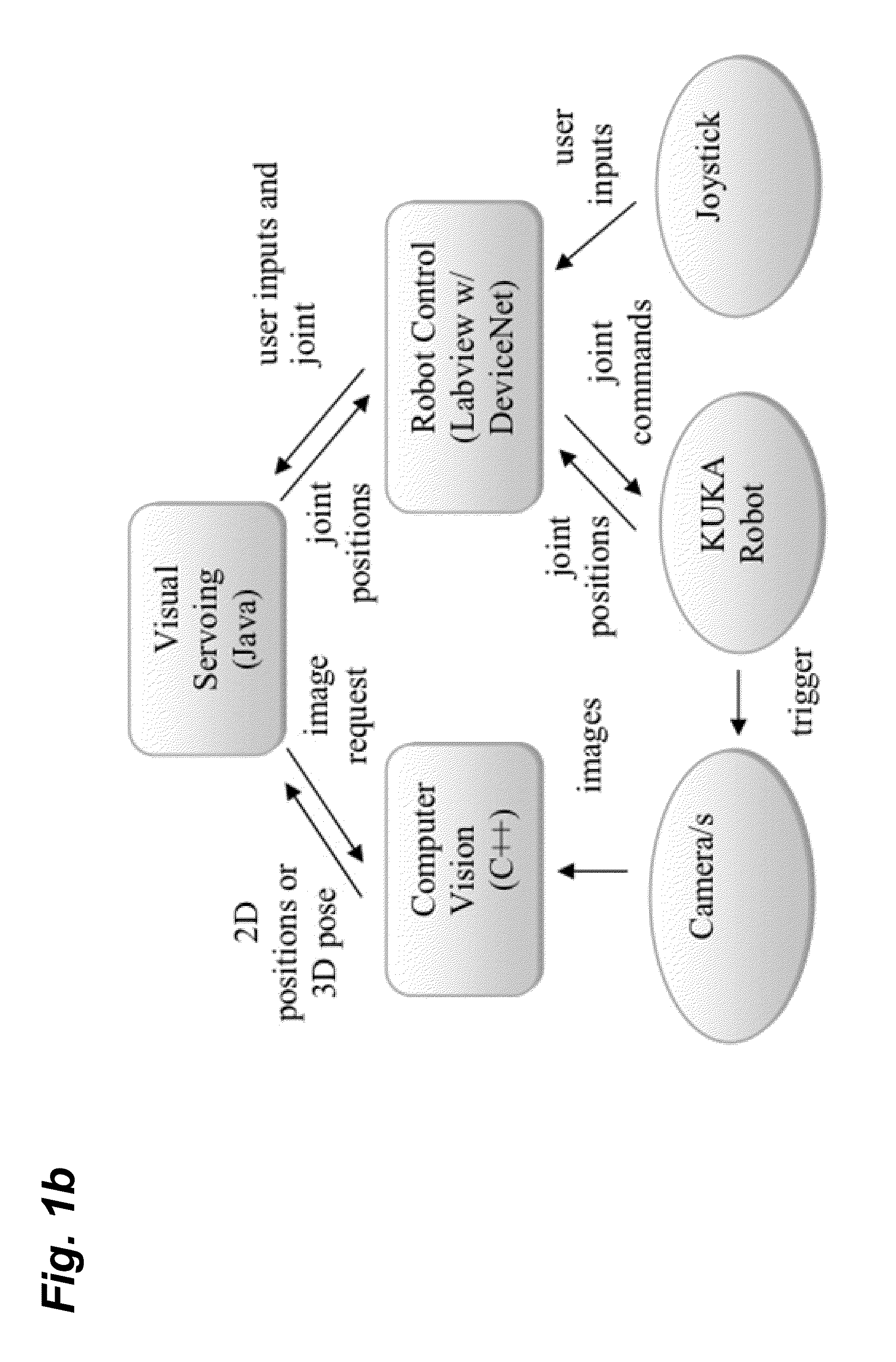
Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.- Image-based visual servoing control methods: Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.
- Position-based visual servoing with 3D pose estimation: This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.
- Visual servoing for robotic manipulation and grasping: Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to approach, grasp, and manipulate objects with high precision. These methods often incorporate object recognition, pose estimation, and trajectory planning to enable robots to interact with objects in unstructured environments, adapting to variations in object position and orientation.
- Hybrid and adaptive visual servoing systems: Advanced visual servoing architectures combine multiple control strategies or adapt their behavior based on task requirements and environmental conditions. These systems may switch between image-based and position-based approaches, incorporate learning algorithms to improve performance over time, or adjust control parameters dynamically. Such flexibility enables robust operation across diverse scenarios and improves system performance in the presence of uncertainties and disturbances.
- Visual servoing with deep learning and AI integration: Modern visual servoing systems integrate artificial intelligence and deep learning techniques to enhance perception and control capabilities. Neural networks are employed for feature extraction, object detection, and scene understanding, enabling more robust performance in complex environments. These intelligent systems can handle occlusions, lighting variations, and dynamic scenes more effectively than traditional methods, and may learn optimal control policies through reinforcement learning or imitation learning approaches.
02 Position-based visual servoing with 3D pose estimation
This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.Expand Specific Solutions03 Visual servoing for robotic manipulation and grasping
Specialized visual servoing techniques are designed for robotic manipulation tasks, including object grasping, assembly, and material handling. These systems integrate visual feedback with gripper control to achieve precise object manipulation. The methods account for object properties, gripper kinematics, and contact dynamics to ensure successful task execution in various industrial and service robotics applications.Expand Specific Solutions04 Adaptive and learning-based visual servoing
Advanced visual servoing systems incorporate adaptive control and machine learning techniques to improve performance and robustness. These methods can automatically adjust control parameters, compensate for uncertainties, and learn from experience to handle varying conditions. The systems may employ neural networks, reinforcement learning, or other artificial intelligence approaches to enhance tracking accuracy and adapt to environmental changes or system variations.Expand Specific Solutions05 Multi-camera and stereo visual servoing systems
Visual servoing architectures utilizing multiple cameras or stereo vision provide enhanced spatial perception and robustness. These systems leverage information from multiple viewpoints to improve depth estimation, handle occlusions, and increase the workspace coverage. The fusion of data from multiple visual sensors enables more reliable tracking and control, particularly in complex environments or when dealing with objects that may be partially obscured.Expand Specific Solutions
Key Players in Border Security and Visual Servoing Industry
The visual servoing optimization for border security technologies represents an emerging market segment within the broader security and surveillance industry, currently in its early growth phase with significant expansion potential driven by increasing global security concerns and technological advancement. The market demonstrates substantial scale opportunities as governments worldwide invest heavily in border protection infrastructure, creating demand for sophisticated automated monitoring systems. Technology maturity varies significantly across key players, with established technology giants like Huawei Technologies, Qualcomm, IBM, and Microsoft Technology Licensing leading in core AI and processing capabilities, while specialized security firms such as Zhejiang Dahua Technology and Certis CISCO Security focus on surveillance-specific applications. Academic institutions including Beijing Institute of Technology, Northwestern Polytechnical University, and South China University of Technology contribute foundational research, particularly in computer vision and robotics integration. The competitive landscape shows a convergence of telecommunications infrastructure providers like Ericsson and China Unicom with defense contractors such as Boeing, indicating the technology's strategic importance and cross-industry applications in autonomous border monitoring systems.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed comprehensive visual servoing solutions for border security through their intelligent surveillance platform that combines 5G connectivity with edge computing capabilities. Their system features multi-sensor fusion technology that integrates visual, infrared, and radar data to provide enhanced situational awareness for border monitoring. The visual servoing component utilizes advanced computer vision algorithms optimized for long-range detection and tracking, capable of operating effectively across distances exceeding 10 kilometers. Their solution incorporates AI-driven behavioral analysis that can distinguish between normal and suspicious activities, reducing false alarms while maintaining high detection accuracy. The system supports distributed deployment with centralized command and control, enabling coordinated monitoring across extensive border regions with minimal latency.
Strengths: Advanced 5G integration and comprehensive multi-sensor fusion capabilities with strong AI processing power. Weaknesses: Geopolitical restrictions may limit deployment in certain regions and higher infrastructure investment requirements.
Cisco Technology, Inc.
Technical Solution: Cisco has developed network-centric visual servoing solutions for border security that emphasize secure, reliable communication between distributed surveillance assets. Their system integrates visual servoing capabilities with robust networking infrastructure, enabling coordinated tracking across multiple camera nodes and sensor platforms. The solution features intelligent video analytics that can automatically detect and track objects of interest while maintaining secure data transmission through encrypted channels. Cisco's approach focuses on creating resilient communication networks that can support high-bandwidth video streaming and real-time control commands even in remote border locations. Their visual servoing technology includes automated failover mechanisms and redundant communication paths to ensure continuous operation during network disruptions or equipment failures.
Strengths: Excellent network infrastructure expertise with robust security protocols and reliable communication systems. Weaknesses: Limited proprietary computer vision capabilities compared to specialized surveillance companies and higher networking complexity.
Core Innovations in Optimized Visual Servoing Systems
Hybrid visual servoing method based on fusion of distance space and image feature space
PatentActiveUS11648682B2
Innovation
- A hybrid visual servoing method that fuses distance space information from high-precision sensors with image feature space information using a hybrid Jacobian matrix, constructed from image and depth Jacobian matrices, to enable comprehensive environmental perception and precise robot motion control.




Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
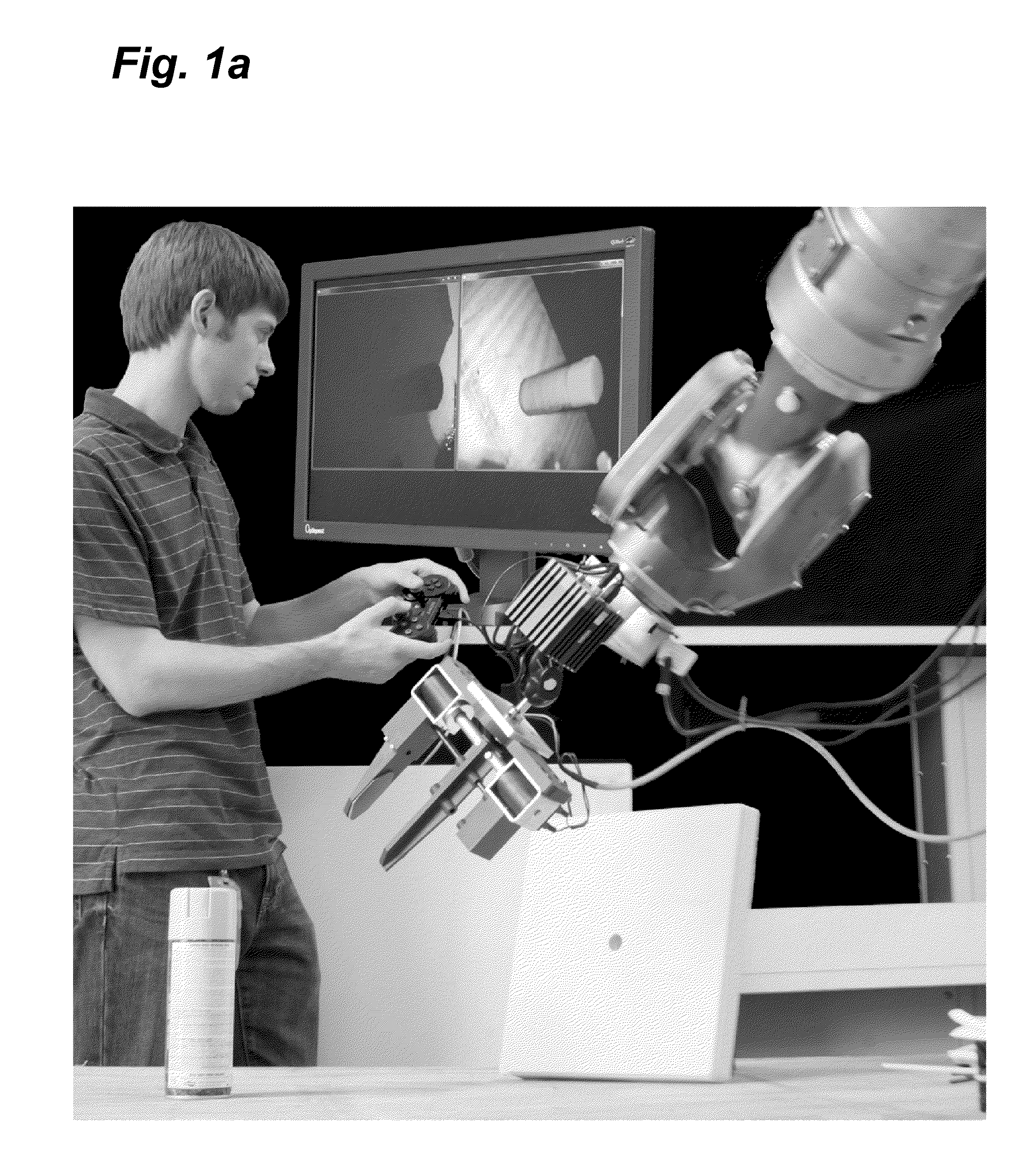
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Regulatory Framework for Border Security Technologies
The regulatory framework governing visual servoing technologies in border security applications operates within a complex multi-jurisdictional environment that encompasses national security, privacy protection, and international cooperation standards. Current regulations primarily stem from homeland security directives, aviation authorities, and cross-border surveillance protocols that were established before the widespread adoption of autonomous visual servoing systems.
National security agencies have developed preliminary guidelines for deploying computer vision systems along international boundaries, focusing on data collection standards, operator certification requirements, and system reliability benchmarks. These frameworks typically mandate human oversight protocols, requiring trained personnel to validate automated detection and tracking decisions made by visual servoing algorithms.
Privacy regulations present significant constraints on visual servoing implementations, particularly regarding biometric data collection and cross-border information sharing. The European Union's GDPR and similar privacy frameworks in other jurisdictions impose strict limitations on facial recognition capabilities and require explicit consent mechanisms that can conflict with real-time border monitoring objectives.
International aviation regulations through ICAO and national aviation authorities establish operational boundaries for drone-based visual servoing systems, including altitude restrictions, no-fly zones, and coordination requirements with air traffic control systems. These regulations often limit the deployment flexibility of autonomous visual tracking platforms in border regions.
Emerging regulatory trends indicate movement toward standardized certification processes for AI-driven border security technologies. Several countries are developing specific approval pathways for visual servoing systems that include performance validation requirements, cybersecurity assessments, and regular compliance auditing procedures.
The regulatory landscape continues evolving as policymakers balance security effectiveness with civil liberties concerns, creating ongoing uncertainty for technology deployment timelines and operational parameters in border security applications.
National security agencies have developed preliminary guidelines for deploying computer vision systems along international boundaries, focusing on data collection standards, operator certification requirements, and system reliability benchmarks. These frameworks typically mandate human oversight protocols, requiring trained personnel to validate automated detection and tracking decisions made by visual servoing algorithms.
Privacy regulations present significant constraints on visual servoing implementations, particularly regarding biometric data collection and cross-border information sharing. The European Union's GDPR and similar privacy frameworks in other jurisdictions impose strict limitations on facial recognition capabilities and require explicit consent mechanisms that can conflict with real-time border monitoring objectives.
International aviation regulations through ICAO and national aviation authorities establish operational boundaries for drone-based visual servoing systems, including altitude restrictions, no-fly zones, and coordination requirements with air traffic control systems. These regulations often limit the deployment flexibility of autonomous visual tracking platforms in border regions.
Emerging regulatory trends indicate movement toward standardized certification processes for AI-driven border security technologies. Several countries are developing specific approval pathways for visual servoing systems that include performance validation requirements, cybersecurity assessments, and regular compliance auditing procedures.
The regulatory landscape continues evolving as policymakers balance security effectiveness with civil liberties concerns, creating ongoing uncertainty for technology deployment timelines and operational parameters in border security applications.
Privacy and Ethics in Automated Border Surveillance
The integration of visual servoing technologies in border security systems raises significant privacy and ethical concerns that require careful consideration and regulatory oversight. As automated surveillance systems become increasingly sophisticated in their ability to track, identify, and analyze human behavior, the potential for privacy violations and discriminatory practices grows substantially.
Privacy implications center on the extensive data collection capabilities of visual servoing systems. These technologies can capture high-resolution imagery, perform real-time facial recognition, and track individual movements across vast geographical areas. The persistent surveillance nature of these systems creates comprehensive digital profiles of border crossers, including biometric data, behavioral patterns, and movement histories. Such extensive data collection raises questions about proportionality and necessity, particularly when applied to legitimate travelers and asylum seekers.
Data protection and storage present additional challenges. Visual servoing systems generate massive amounts of sensitive personal information that must be securely stored, processed, and eventually disposed of according to strict protocols. Cross-border data sharing agreements between nations further complicate privacy protection, as different jurisdictions may have varying standards for data handling and individual rights protection.
Algorithmic bias represents a critical ethical concern in automated border surveillance. Visual servoing systems rely on machine learning algorithms that may exhibit discriminatory behavior based on race, ethnicity, gender, or nationality. These biases can result in disproportionate targeting of specific demographic groups, leading to unfair treatment and potential human rights violations. The lack of transparency in algorithmic decision-making processes makes it difficult to identify and correct such biases.
Accountability and human oversight mechanisms are essential for ethical implementation. Automated systems should not operate without meaningful human supervision, particularly in decisions affecting individual rights and freedoms. Clear protocols must establish when human intervention is required and ensure that automated recommendations can be challenged and reviewed.
International human rights frameworks, including the right to privacy, non-discrimination, and due process, must guide the development and deployment of visual servoing technologies in border security. Regulatory frameworks should establish clear limitations on surveillance capabilities, mandate regular audits for bias and accuracy, and provide robust appeal mechanisms for affected individuals.
Privacy implications center on the extensive data collection capabilities of visual servoing systems. These technologies can capture high-resolution imagery, perform real-time facial recognition, and track individual movements across vast geographical areas. The persistent surveillance nature of these systems creates comprehensive digital profiles of border crossers, including biometric data, behavioral patterns, and movement histories. Such extensive data collection raises questions about proportionality and necessity, particularly when applied to legitimate travelers and asylum seekers.
Data protection and storage present additional challenges. Visual servoing systems generate massive amounts of sensitive personal information that must be securely stored, processed, and eventually disposed of according to strict protocols. Cross-border data sharing agreements between nations further complicate privacy protection, as different jurisdictions may have varying standards for data handling and individual rights protection.
Algorithmic bias represents a critical ethical concern in automated border surveillance. Visual servoing systems rely on machine learning algorithms that may exhibit discriminatory behavior based on race, ethnicity, gender, or nationality. These biases can result in disproportionate targeting of specific demographic groups, leading to unfair treatment and potential human rights violations. The lack of transparency in algorithmic decision-making processes makes it difficult to identify and correct such biases.
Accountability and human oversight mechanisms are essential for ethical implementation. Automated systems should not operate without meaningful human supervision, particularly in decisions affecting individual rights and freedoms. Clear protocols must establish when human intervention is required and ensure that automated recommendations can be challenged and reviewed.
International human rights frameworks, including the right to privacy, non-discrimination, and due process, must guide the development and deployment of visual servoing technologies in border security. Regulatory frameworks should establish clear limitations on surveillance capabilities, mandate regular audits for bias and accuracy, and provide robust appeal mechanisms for affected individuals.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!