

Visual Servoing in Telecommunications: Benefits and Drawbacks
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing in Telecom Background and Objectives
Visual servoing technology has emerged as a critical component in modern telecommunications infrastructure, representing the convergence of computer vision, robotics, and automated control systems. This technology utilizes real-time visual feedback from cameras and sensors to guide robotic systems in performing precise tasks within telecommunications environments. The evolution of visual servoing can be traced back to early industrial automation applications in the 1980s, but its integration into telecommunications has accelerated significantly over the past decade.
The telecommunications industry has witnessed unprecedented growth in network complexity and infrastructure demands, driven by the proliferation of 5G networks, Internet of Things devices, and edge computing requirements. Traditional manual maintenance and installation processes have become increasingly inadequate to meet the scale and precision requirements of modern telecom operations. Visual servoing addresses these challenges by enabling automated systems to perform tasks such as antenna alignment, cable routing, equipment installation, and maintenance operations with enhanced accuracy and efficiency.
The primary objective of implementing visual servoing in telecommunications is to achieve autonomous operation capabilities that can significantly reduce human intervention in hazardous or difficult-to-access environments. This includes operations on cell towers, underground cable installations, and remote base station maintenance. The technology aims to improve operational safety by minimizing human exposure to electromagnetic radiation and dangerous working conditions at height.
Another key objective involves enhancing precision and consistency in telecommunications infrastructure deployment. Visual servoing systems can achieve sub-millimeter accuracy in antenna positioning and alignment, which is crucial for optimal signal propagation and network performance. This level of precision is particularly important for millimeter-wave 5G installations where small misalignments can significantly impact coverage and capacity.
Cost reduction represents a fundamental goal driving visual servoing adoption in telecommunications. By automating routine maintenance tasks and enabling predictive maintenance through continuous visual monitoring, operators can reduce operational expenses while improving service reliability. The technology also aims to accelerate deployment timelines for new infrastructure, enabling faster network expansion and service delivery.
The integration of artificial intelligence and machine learning algorithms with visual servoing systems seeks to create adaptive solutions that can learn from operational experience and optimize performance over time. This evolutionary capability is essential for managing the increasing complexity of telecommunications networks and ensuring long-term operational efficiency.
The telecommunications industry has witnessed unprecedented growth in network complexity and infrastructure demands, driven by the proliferation of 5G networks, Internet of Things devices, and edge computing requirements. Traditional manual maintenance and installation processes have become increasingly inadequate to meet the scale and precision requirements of modern telecom operations. Visual servoing addresses these challenges by enabling automated systems to perform tasks such as antenna alignment, cable routing, equipment installation, and maintenance operations with enhanced accuracy and efficiency.
The primary objective of implementing visual servoing in telecommunications is to achieve autonomous operation capabilities that can significantly reduce human intervention in hazardous or difficult-to-access environments. This includes operations on cell towers, underground cable installations, and remote base station maintenance. The technology aims to improve operational safety by minimizing human exposure to electromagnetic radiation and dangerous working conditions at height.
Another key objective involves enhancing precision and consistency in telecommunications infrastructure deployment. Visual servoing systems can achieve sub-millimeter accuracy in antenna positioning and alignment, which is crucial for optimal signal propagation and network performance. This level of precision is particularly important for millimeter-wave 5G installations where small misalignments can significantly impact coverage and capacity.
Cost reduction represents a fundamental goal driving visual servoing adoption in telecommunications. By automating routine maintenance tasks and enabling predictive maintenance through continuous visual monitoring, operators can reduce operational expenses while improving service reliability. The technology also aims to accelerate deployment timelines for new infrastructure, enabling faster network expansion and service delivery.
The integration of artificial intelligence and machine learning algorithms with visual servoing systems seeks to create adaptive solutions that can learn from operational experience and optimize performance over time. This evolutionary capability is essential for managing the increasing complexity of telecommunications networks and ensuring long-term operational efficiency.
Market Demand for Automated Telecom Infrastructure
The telecommunications industry is experiencing unprecedented demand for automated infrastructure solutions, driven by the exponential growth in data consumption, network complexity, and the need for operational efficiency. Network operators worldwide are grappling with the challenge of maintaining and optimizing increasingly sophisticated telecommunications systems while reducing operational costs and minimizing human intervention in hazardous or remote environments.
The proliferation of 5G networks has significantly amplified the complexity of telecommunications infrastructure, requiring precise alignment and maintenance of numerous small cells, base stations, and antenna arrays. Traditional manual maintenance approaches are becoming economically unsustainable as network densification continues to accelerate. Service providers are actively seeking automated solutions that can perform real-time adjustments, fault detection, and preventive maintenance without requiring extensive human resources.
Edge computing deployment represents another critical driver of automation demand in telecommunications. As computing resources move closer to end users, the number of distributed infrastructure points requiring monitoring and maintenance has multiplied exponentially. This distributed architecture necessitates automated systems capable of remote operation and self-optimization to ensure consistent service quality across geographically dispersed locations.
The labor shortage in skilled telecommunications technicians has created additional pressure for automation adoption. Many regions face difficulties in recruiting and retaining qualified personnel capable of performing complex infrastructure maintenance tasks. Automated systems offer a viable solution to bridge this skills gap while ensuring continuous network operation and performance optimization.
Regulatory requirements for network reliability and uptime standards are becoming increasingly stringent across global markets. Telecommunications operators must demonstrate consistent service availability while minimizing service disruptions. Automated infrastructure management systems provide the precision and responsiveness necessary to meet these regulatory demands while reducing the risk of human error in critical maintenance operations.
Cost optimization pressures from competitive market dynamics are compelling telecommunications companies to explore automation technologies that can deliver measurable returns on investment. The potential for reduced operational expenses, improved maintenance efficiency, and enhanced network performance creates a compelling business case for automated infrastructure solutions, particularly those incorporating advanced visual servoing capabilities for precise equipment positioning and alignment tasks.
The proliferation of 5G networks has significantly amplified the complexity of telecommunications infrastructure, requiring precise alignment and maintenance of numerous small cells, base stations, and antenna arrays. Traditional manual maintenance approaches are becoming economically unsustainable as network densification continues to accelerate. Service providers are actively seeking automated solutions that can perform real-time adjustments, fault detection, and preventive maintenance without requiring extensive human resources.
Edge computing deployment represents another critical driver of automation demand in telecommunications. As computing resources move closer to end users, the number of distributed infrastructure points requiring monitoring and maintenance has multiplied exponentially. This distributed architecture necessitates automated systems capable of remote operation and self-optimization to ensure consistent service quality across geographically dispersed locations.
The labor shortage in skilled telecommunications technicians has created additional pressure for automation adoption. Many regions face difficulties in recruiting and retaining qualified personnel capable of performing complex infrastructure maintenance tasks. Automated systems offer a viable solution to bridge this skills gap while ensuring continuous network operation and performance optimization.
Regulatory requirements for network reliability and uptime standards are becoming increasingly stringent across global markets. Telecommunications operators must demonstrate consistent service availability while minimizing service disruptions. Automated infrastructure management systems provide the precision and responsiveness necessary to meet these regulatory demands while reducing the risk of human error in critical maintenance operations.
Cost optimization pressures from competitive market dynamics are compelling telecommunications companies to explore automation technologies that can deliver measurable returns on investment. The potential for reduced operational expenses, improved maintenance efficiency, and enhanced network performance creates a compelling business case for automated infrastructure solutions, particularly those incorporating advanced visual servoing capabilities for precise equipment positioning and alignment tasks.
Current State of Visual Servoing in Telecom Applications
Visual servoing technology in telecommunications has evolved from experimental laboratory applications to practical deployment scenarios, though adoption remains selective and application-specific. Current implementations primarily focus on infrastructure maintenance, network optimization, and automated installation processes where visual feedback provides critical operational advantages.
The telecommunications industry has integrated visual servoing systems most successfully in cell tower maintenance and antenna alignment applications. Major telecom equipment manufacturers like Ericsson, Nokia, and Huawei have developed proprietary visual servoing solutions for automated antenna positioning and orientation correction. These systems utilize high-resolution cameras combined with computer vision algorithms to achieve precise angular adjustments within 0.1-degree accuracy, significantly improving signal quality and coverage optimization.
Fiber optic network deployment represents another significant application area where visual servoing demonstrates practical value. Automated fiber splicing equipment from companies such as Fujikura and Sumitomo Electric incorporates advanced visual servoing capabilities to achieve sub-micron precision in fiber alignment. These systems process real-time visual feedback to compensate for environmental vibrations and mechanical tolerances during splicing operations.
Current technological limitations constrain broader adoption across telecommunications applications. Processing latency remains a critical challenge, with most commercial systems requiring 50-200 milliseconds for visual processing and servo response cycles. This latency proves acceptable for infrastructure maintenance tasks but inadequate for real-time network switching or dynamic beamforming applications where microsecond response times are essential.
Environmental robustness presents ongoing technical challenges for outdoor telecommunications applications. Existing visual servoing systems struggle with varying lighting conditions, weather interference, and electromagnetic noise common in telecom environments. Current solutions typically require controlled lighting environments or infrared imaging systems, increasing implementation complexity and operational costs.
Integration complexity with existing telecommunications infrastructure represents a significant barrier to widespread adoption. Most legacy telecom systems lack standardized interfaces for visual servoing integration, requiring custom development and extensive system modifications. Current implementations often operate as standalone systems rather than integrated components of broader network management platforms.
The geographic distribution of visual servoing technology in telecommunications shows concentration in developed markets, particularly North America, Europe, and East Asia, where infrastructure investment levels support advanced automation technologies. Emerging markets demonstrate limited adoption due to cost considerations and technical support requirements.
The telecommunications industry has integrated visual servoing systems most successfully in cell tower maintenance and antenna alignment applications. Major telecom equipment manufacturers like Ericsson, Nokia, and Huawei have developed proprietary visual servoing solutions for automated antenna positioning and orientation correction. These systems utilize high-resolution cameras combined with computer vision algorithms to achieve precise angular adjustments within 0.1-degree accuracy, significantly improving signal quality and coverage optimization.
Fiber optic network deployment represents another significant application area where visual servoing demonstrates practical value. Automated fiber splicing equipment from companies such as Fujikura and Sumitomo Electric incorporates advanced visual servoing capabilities to achieve sub-micron precision in fiber alignment. These systems process real-time visual feedback to compensate for environmental vibrations and mechanical tolerances during splicing operations.
Current technological limitations constrain broader adoption across telecommunications applications. Processing latency remains a critical challenge, with most commercial systems requiring 50-200 milliseconds for visual processing and servo response cycles. This latency proves acceptable for infrastructure maintenance tasks but inadequate for real-time network switching or dynamic beamforming applications where microsecond response times are essential.
Environmental robustness presents ongoing technical challenges for outdoor telecommunications applications. Existing visual servoing systems struggle with varying lighting conditions, weather interference, and electromagnetic noise common in telecom environments. Current solutions typically require controlled lighting environments or infrared imaging systems, increasing implementation complexity and operational costs.
Integration complexity with existing telecommunications infrastructure represents a significant barrier to widespread adoption. Most legacy telecom systems lack standardized interfaces for visual servoing integration, requiring custom development and extensive system modifications. Current implementations often operate as standalone systems rather than integrated components of broader network management platforms.
The geographic distribution of visual servoing technology in telecommunications shows concentration in developed markets, particularly North America, Europe, and East Asia, where infrastructure investment levels support advanced automation technologies. Emerging markets demonstrate limited adoption due to cost considerations and technical support requirements.
Existing Visual Servoing Systems for Telecom Operations
01 Image-based visual servoing control methods
Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.- Image-based visual servoing control methods: Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.
- Position-based visual servoing with 3D pose estimation: This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.
- Visual servoing for robotic manipulation and grasping: Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying positions, orientations, or shapes. This approach enhances robotic dexterity and allows robots to handle objects in unstructured environments without precise pre-programming.
- Multi-camera and stereo vision servoing systems: Advanced visual servoing implementations employ multiple cameras or stereo vision configurations to enhance depth perception and expand the field of view. These systems fuse information from multiple viewpoints to improve tracking accuracy, handle occlusions, and provide more robust control. The multi-camera approach enables better spatial understanding and can maintain visual contact with targets throughout complex motion trajectories.
- Deep learning and AI-enhanced visual servoing: Modern visual servoing systems integrate deep learning and artificial intelligence techniques to improve feature detection, object recognition, and control performance. Neural networks are employed for robust visual tracking, semantic understanding of scenes, and learning optimal control policies. These intelligent systems can adapt to varying lighting conditions, handle complex backgrounds, and generalize across different tasks with minimal manual tuning.
02 Position-based visual servoing with 3D pose estimation
This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this pose information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.Expand Specific Solutions03 Visual servoing for robotic manipulation and grasping
Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying positions, orientations, or shapes. These methods often incorporate object recognition and tracking algorithms to maintain visual lock on targets throughout the manipulation process.Expand Specific Solutions04 Hybrid visual servoing combining multiple control strategies
Advanced visual servoing systems integrate multiple control paradigms to leverage advantages of different approaches while mitigating their individual limitations. These hybrid methods may combine image-based and position-based techniques, or incorporate additional sensor modalities alongside vision. The integration allows for improved robustness, larger convergence domains, and better performance across diverse operating conditions and task requirements.Expand Specific Solutions05 Visual servoing with deep learning and AI-based perception
Modern visual servoing systems incorporate artificial intelligence and deep learning techniques for enhanced visual perception and control. Neural networks are employed for feature extraction, object detection, pose estimation, and even end-to-end control policy learning. These AI-enhanced approaches improve system adaptability, enable handling of complex visual scenes, and can learn optimal control strategies from demonstration or experience.Expand Specific Solutions
Key Players in Visual Servoing Telecom Solutions
The visual servoing technology in telecommunications is experiencing rapid evolution driven by the convergence of 5G networks, IoT expansion, and AI integration. The market demonstrates substantial growth potential as network infrastructure becomes increasingly complex, requiring automated visual monitoring and control systems. Technology maturity varies significantly across market participants, with established telecommunications giants like Huawei Technologies, Ericsson, and Samsung Electronics leading in infrastructure integration, while tech innovators such as Google LLC and Microsoft Technology Licensing drive AI-powered visual analytics. Traditional players including Cisco Technology, Verizon, and T-Mobile US focus on network optimization applications, whereas emerging companies like Visionvera Information Technology specialize in video communication solutions. The competitive landscape reflects a maturing technology with diverse implementation approaches across hardware, software, and service domains.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed comprehensive visual servoing solutions for telecommunications infrastructure, integrating computer vision with 5G network optimization. Their approach combines real-time image processing with AI-driven network management, enabling automated antenna alignment and base station positioning. The system utilizes advanced machine learning algorithms to process visual feedback for dynamic network configuration adjustments. Huawei's visual servoing technology supports remote infrastructure monitoring, reducing manual intervention requirements by approximately 60% while improving network coverage accuracy. Their solution incorporates edge computing capabilities to minimize latency in visual feedback loops, essential for real-time telecommunications applications.
Strengths: Market-leading 5G infrastructure expertise, comprehensive AI integration, proven deployment scale. Weaknesses: Geopolitical restrictions limiting global market access, high implementation complexity.
Telefonaktiebolaget LM Ericsson
Technical Solution: Ericsson has implemented visual servoing technology in their network management systems, focusing on automated cell tower maintenance and optimization. Their solution leverages computer vision for real-time monitoring of antenna positioning and environmental conditions affecting signal propagation. The system integrates with their existing network orchestration platform, enabling predictive maintenance through visual analysis of equipment status. Ericsson's approach emphasizes reducing operational expenditure through automated visual inspection systems that can detect equipment degradation before failure occurs. Their visual servoing implementation supports both terrestrial and satellite communication systems, with particular strength in Nordic and European markets where harsh weather conditions require robust monitoring solutions.
Strengths: Strong European market presence, robust weather-resistant systems, integrated network management platform. Weaknesses: Limited AI capabilities compared to tech giants, slower innovation cycles in visual technologies.
Core Patents in Telecom Visual Servoing Technologies
An apparatus and a method for obtaining a registration error map representing a level of sharpness of an image
PatentWO2016202946A1
Innovation
- An apparatus and method using four-dimensional light-field data to generate a registration error map by computing the intersection of a re-focusing surface from a three-dimensional model and a focal stack, determining the re-focusing distance for each pixel, and displaying a map representing the level of sharpness of pixels in the image, allowing for improved visual guidance and quality control.




Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
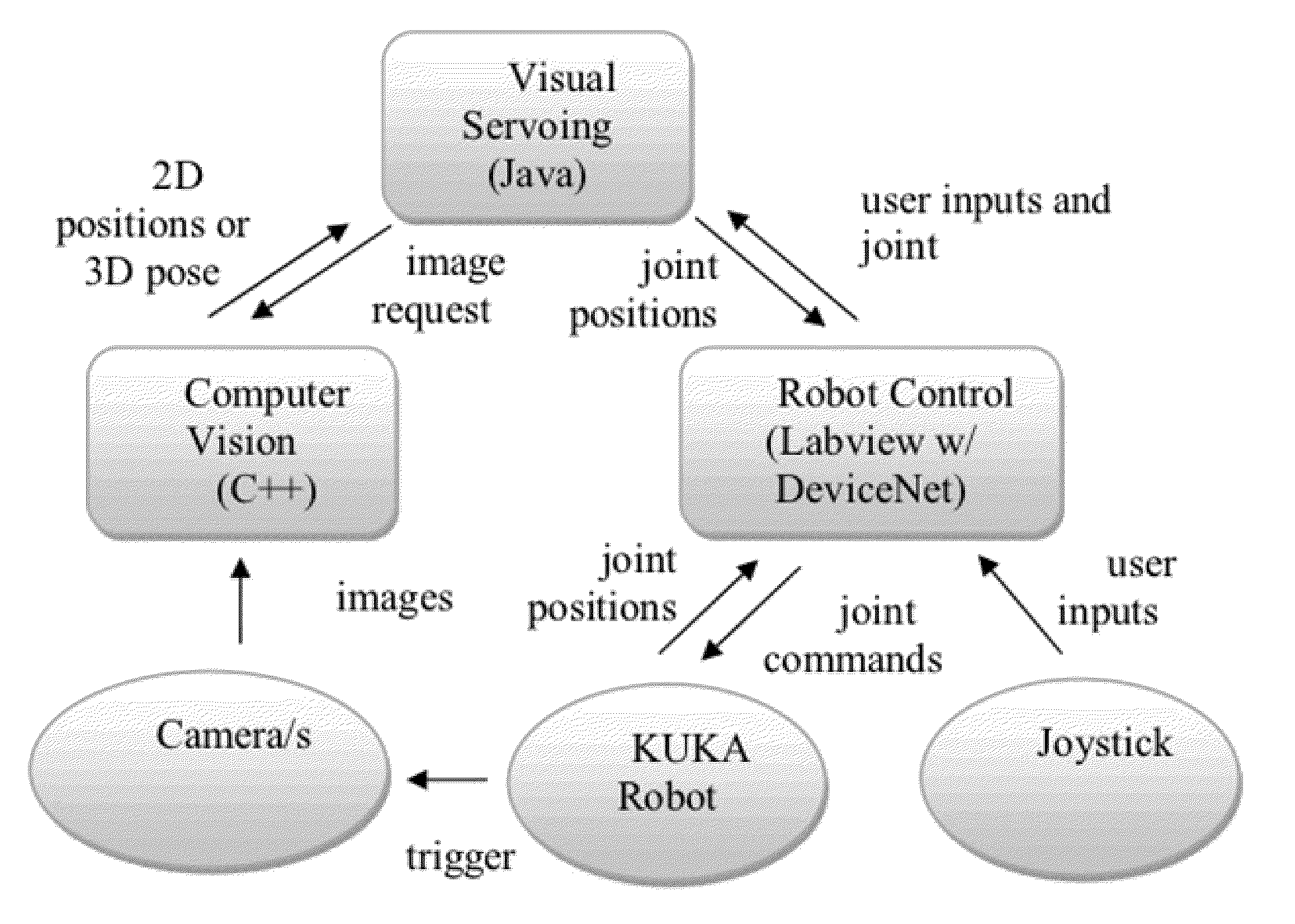
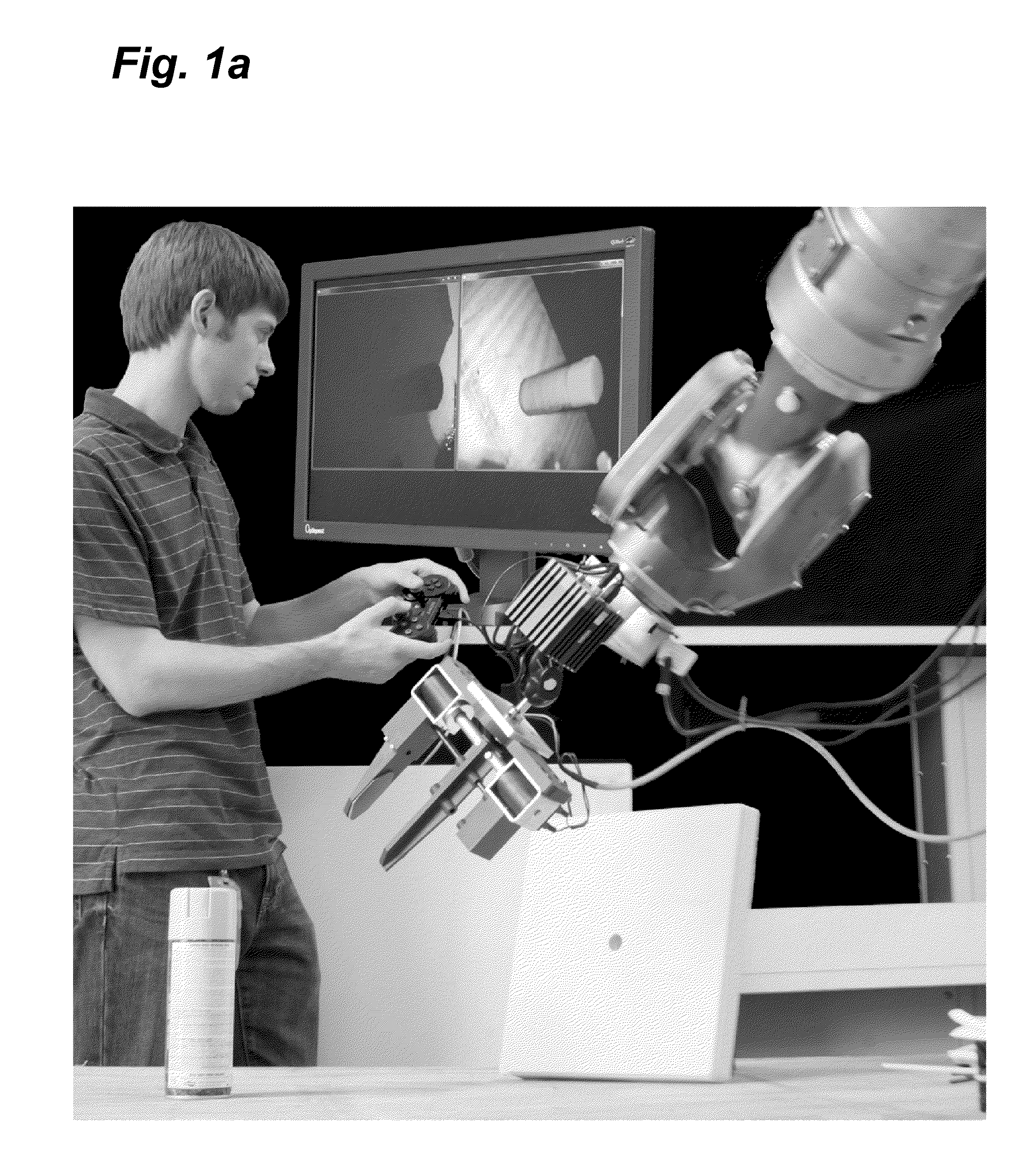
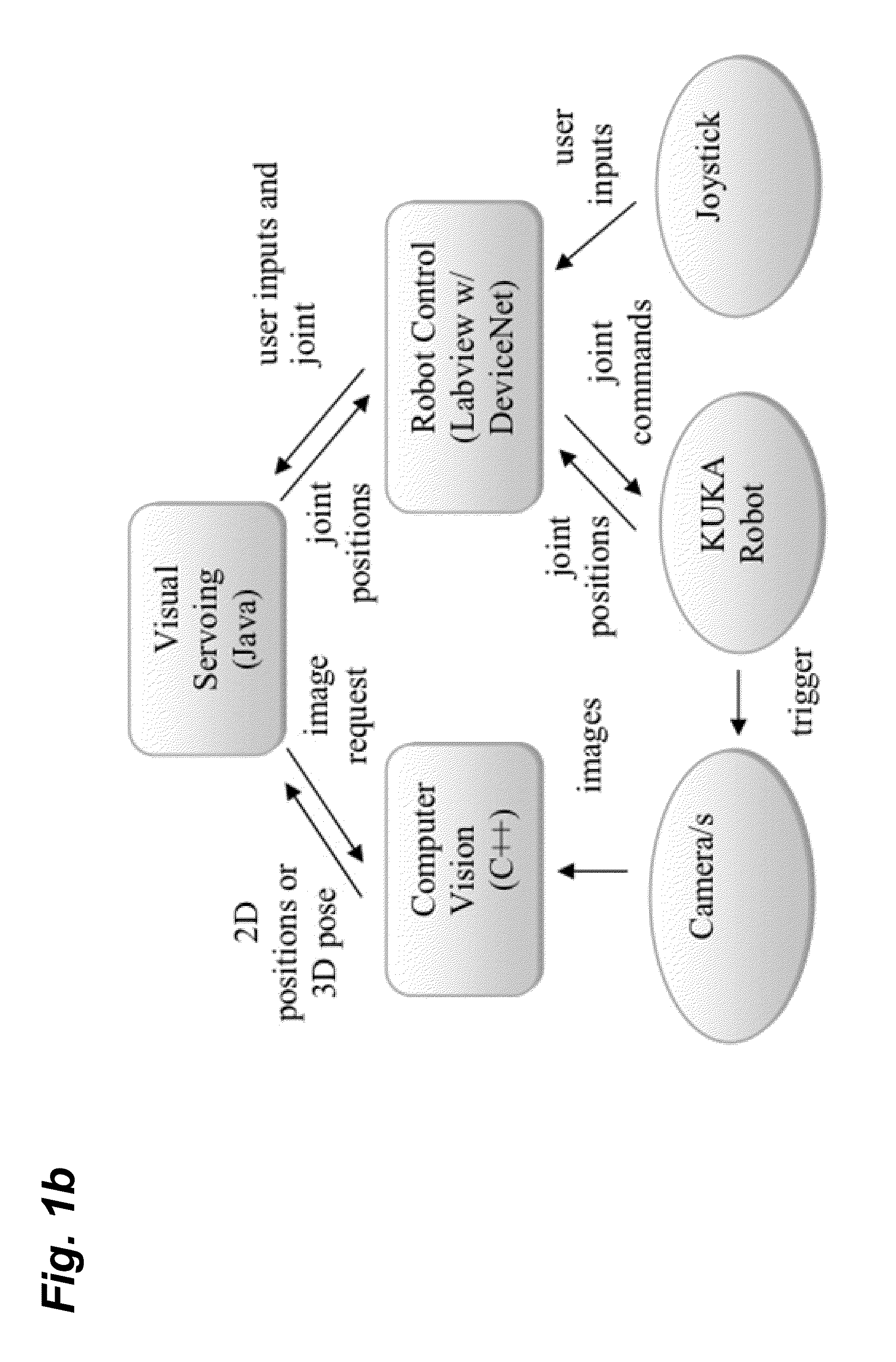
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Safety Standards for Automated Telecom Equipment
The integration of visual servoing technologies in telecommunications infrastructure necessitates comprehensive safety standards for automated telecom equipment to ensure operational reliability and personnel protection. Current safety frameworks must evolve to address the unique challenges posed by vision-guided automation systems in telecommunications environments.
Existing safety standards such as IEC 61508 for functional safety and ISO 13849 for machinery safety provide foundational frameworks, but require specific adaptations for visual servoing applications. The dynamic nature of visual feedback systems introduces new failure modes that traditional safety protocols may not adequately address, particularly regarding sensor degradation, environmental interference, and real-time processing delays.
Critical safety considerations include fail-safe mechanisms for visual sensor failures, where backup positioning systems must engage when camera-based guidance becomes unreliable. Environmental factors such as weather conditions, lighting variations, and electromagnetic interference can compromise visual servoing accuracy, necessitating robust detection and mitigation protocols. Equipment must incorporate redundant safety systems that can operate independently of visual feedback when necessary.
Personnel safety protocols require updating to account for automated equipment operating with visual servoing capabilities. Clear demarcation zones, emergency stop procedures, and human-machine interface standards become crucial when workers interact with vision-guided systems. Training requirements must encompass understanding of visual servoing limitations and appropriate safety responses during system malfunctions.
Compliance frameworks should establish minimum performance criteria for visual servoing systems, including accuracy thresholds, response time requirements, and environmental operating limits. Regular calibration and maintenance protocols must be standardized to ensure consistent safety performance throughout equipment lifecycle.
The development of industry-specific safety standards for visual servoing in telecommunications requires collaboration between equipment manufacturers, telecommunications operators, and safety regulatory bodies. These standards must balance innovation enablement with risk mitigation, ensuring that advanced automation capabilities do not compromise operational safety or regulatory compliance in critical telecommunications infrastructure.
Existing safety standards such as IEC 61508 for functional safety and ISO 13849 for machinery safety provide foundational frameworks, but require specific adaptations for visual servoing applications. The dynamic nature of visual feedback systems introduces new failure modes that traditional safety protocols may not adequately address, particularly regarding sensor degradation, environmental interference, and real-time processing delays.
Critical safety considerations include fail-safe mechanisms for visual sensor failures, where backup positioning systems must engage when camera-based guidance becomes unreliable. Environmental factors such as weather conditions, lighting variations, and electromagnetic interference can compromise visual servoing accuracy, necessitating robust detection and mitigation protocols. Equipment must incorporate redundant safety systems that can operate independently of visual feedback when necessary.
Personnel safety protocols require updating to account for automated equipment operating with visual servoing capabilities. Clear demarcation zones, emergency stop procedures, and human-machine interface standards become crucial when workers interact with vision-guided systems. Training requirements must encompass understanding of visual servoing limitations and appropriate safety responses during system malfunctions.
Compliance frameworks should establish minimum performance criteria for visual servoing systems, including accuracy thresholds, response time requirements, and environmental operating limits. Regular calibration and maintenance protocols must be standardized to ensure consistent safety performance throughout equipment lifecycle.
The development of industry-specific safety standards for visual servoing in telecommunications requires collaboration between equipment manufacturers, telecommunications operators, and safety regulatory bodies. These standards must balance innovation enablement with risk mitigation, ensuring that advanced automation capabilities do not compromise operational safety or regulatory compliance in critical telecommunications infrastructure.
Cost-Benefit Analysis of Visual Servoing Implementation
The implementation of visual servoing systems in telecommunications infrastructure requires substantial upfront capital investment, encompassing specialized camera equipment, high-performance computing hardware, and sophisticated software platforms. Initial deployment costs typically range from $50,000 to $200,000 per cell tower or base station, depending on system complexity and environmental requirements. These expenses include ruggedized imaging sensors capable of operating in harsh outdoor conditions, edge computing units for real-time processing, and integration with existing network management systems.
Operational expenditure analysis reveals significant long-term savings potential through reduced manual inspection requirements and predictive maintenance capabilities. Traditional tower maintenance involves quarterly physical inspections costing approximately $2,000-$5,000 per visit, including technician deployment, equipment rental, and potential service disruptions. Visual servoing systems can reduce these inspection frequencies by 60-70% while providing continuous monitoring capabilities, translating to annual savings of $15,000-$25,000 per installation.
The return on investment timeline typically spans 18-36 months, depending on deployment scale and maintenance cost baselines. Large telecommunications operators with extensive infrastructure portfolios achieve faster payback periods due to economies of scale and higher absolute savings. Risk mitigation benefits, including reduced equipment downtime and improved safety compliance, contribute additional value that is often difficult to quantify but significantly impacts total cost of ownership.
Implementation costs vary considerably based on geographic factors and existing infrastructure compatibility. Remote locations require additional investment in power systems and communication links, potentially increasing deployment costs by 30-50%. However, these same locations often yield the highest operational savings due to reduced accessibility and higher traditional maintenance costs.
The financial analysis must also consider technology refresh cycles and ongoing software licensing fees, which typically represent 10-15% of initial capital expenditure annually. Despite these recurring costs, the cumulative financial benefits, combined with improved service reliability and regulatory compliance advantages, demonstrate strong economic justification for visual servoing adoption in telecommunications applications.
Operational expenditure analysis reveals significant long-term savings potential through reduced manual inspection requirements and predictive maintenance capabilities. Traditional tower maintenance involves quarterly physical inspections costing approximately $2,000-$5,000 per visit, including technician deployment, equipment rental, and potential service disruptions. Visual servoing systems can reduce these inspection frequencies by 60-70% while providing continuous monitoring capabilities, translating to annual savings of $15,000-$25,000 per installation.
The return on investment timeline typically spans 18-36 months, depending on deployment scale and maintenance cost baselines. Large telecommunications operators with extensive infrastructure portfolios achieve faster payback periods due to economies of scale and higher absolute savings. Risk mitigation benefits, including reduced equipment downtime and improved safety compliance, contribute additional value that is often difficult to quantify but significantly impacts total cost of ownership.
Implementation costs vary considerably based on geographic factors and existing infrastructure compatibility. Remote locations require additional investment in power systems and communication links, potentially increasing deployment costs by 30-50%. However, these same locations often yield the highest operational savings due to reduced accessibility and higher traditional maintenance costs.
The financial analysis must also consider technology refresh cycles and ongoing software licensing fees, which typically represent 10-15% of initial capital expenditure annually. Despite these recurring costs, the cumulative financial benefits, combined with improved service reliability and regulatory compliance advantages, demonstrate strong economic justification for visual servoing adoption in telecommunications applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!