

Implementing Visual Servoing for Enhanced Building Automation
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing in Building Automation Background and Objectives
Visual servoing represents a convergence of computer vision and control systems that has evolved significantly since its inception in the 1980s. Initially developed for robotic applications in manufacturing environments, this technology utilizes real-time visual feedback to guide and control mechanical systems with unprecedented precision. The fundamental principle involves extracting visual features from camera images and using this information to compute control commands that drive actuators toward desired positions or configurations.
The evolution of visual servoing has been marked by several key technological breakthroughs. Early systems relied on simple geometric features and basic image processing algorithms, limiting their application to controlled laboratory environments. The advent of advanced computer vision techniques, including machine learning and deep neural networks, has dramatically expanded the capabilities and robustness of visual servoing systems. Modern implementations can handle complex visual scenes, adapt to varying lighting conditions, and operate reliably in dynamic environments.
Building automation systems have traditionally relied on conventional sensors such as temperature probes, pressure transducers, and proximity switches to monitor and control building operations. While effective for basic functions, these sensors provide limited spatial information and cannot adapt to changing environmental conditions or occupancy patterns. The integration of visual servoing technology represents a paradigm shift toward intelligent, adaptive building management systems that can perceive and respond to complex visual cues.
The primary objective of implementing visual servoing in building automation is to create responsive, intelligent systems capable of real-time environmental adaptation. This includes precise control of HVAC dampers based on visual occupancy detection, automated adjustment of lighting systems according to natural light conditions and human presence, and dynamic reconfiguration of space utilization based on visual analytics. These capabilities enable buildings to optimize energy consumption while maintaining optimal comfort levels for occupants.
Contemporary building automation faces increasing demands for energy efficiency, occupant comfort, and operational flexibility. Visual servoing technology addresses these challenges by providing continuous, non-intrusive monitoring capabilities that can detect subtle changes in environmental conditions, occupancy patterns, and equipment performance. The technology enables predictive maintenance strategies by visually monitoring equipment wear and identifying potential failures before they occur.
The strategic implementation of visual servoing in building automation aims to establish a foundation for next-generation smart buildings that can autonomously adapt to changing conditions, optimize resource utilization, and provide enhanced user experiences through intelligent environmental control systems.
The evolution of visual servoing has been marked by several key technological breakthroughs. Early systems relied on simple geometric features and basic image processing algorithms, limiting their application to controlled laboratory environments. The advent of advanced computer vision techniques, including machine learning and deep neural networks, has dramatically expanded the capabilities and robustness of visual servoing systems. Modern implementations can handle complex visual scenes, adapt to varying lighting conditions, and operate reliably in dynamic environments.
Building automation systems have traditionally relied on conventional sensors such as temperature probes, pressure transducers, and proximity switches to monitor and control building operations. While effective for basic functions, these sensors provide limited spatial information and cannot adapt to changing environmental conditions or occupancy patterns. The integration of visual servoing technology represents a paradigm shift toward intelligent, adaptive building management systems that can perceive and respond to complex visual cues.
The primary objective of implementing visual servoing in building automation is to create responsive, intelligent systems capable of real-time environmental adaptation. This includes precise control of HVAC dampers based on visual occupancy detection, automated adjustment of lighting systems according to natural light conditions and human presence, and dynamic reconfiguration of space utilization based on visual analytics. These capabilities enable buildings to optimize energy consumption while maintaining optimal comfort levels for occupants.
Contemporary building automation faces increasing demands for energy efficiency, occupant comfort, and operational flexibility. Visual servoing technology addresses these challenges by providing continuous, non-intrusive monitoring capabilities that can detect subtle changes in environmental conditions, occupancy patterns, and equipment performance. The technology enables predictive maintenance strategies by visually monitoring equipment wear and identifying potential failures before they occur.
The strategic implementation of visual servoing in building automation aims to establish a foundation for next-generation smart buildings that can autonomously adapt to changing conditions, optimize resource utilization, and provide enhanced user experiences through intelligent environmental control systems.
Market Demand for Smart Building Visual Control Systems
The global smart building market is experiencing unprecedented growth driven by increasing urbanization, energy efficiency mandates, and the proliferation of Internet of Things technologies. Building owners and facility managers are actively seeking advanced automation solutions that can reduce operational costs while improving occupant comfort and safety. Visual servoing technologies represent a critical component in this transformation, offering precise control capabilities that traditional sensor-based systems cannot match.
Energy management constitutes the primary driver for smart building visual control system adoption. Commercial buildings account for substantial energy consumption worldwide, and stakeholders are under mounting pressure to implement sustainable practices. Visual servoing enables real-time monitoring and adjustment of lighting, HVAC systems, and window positioning based on occupancy patterns and environmental conditions, delivering measurable energy savings that justify initial investment costs.
The commercial real estate sector demonstrates particularly strong demand for visual control systems, especially in premium office buildings, shopping centers, and hospitality facilities. Property developers recognize that advanced automation features significantly enhance building value and tenant satisfaction. Modern tenants increasingly expect intelligent building services that adapt to their presence and preferences, creating competitive advantages for properties equipped with sophisticated visual servoing capabilities.
Healthcare and educational institutions represent rapidly expanding market segments for building automation visual control systems. These environments require precise environmental control for optimal performance and safety. Visual servoing technology enables automated adjustment of lighting conditions, air quality management, and space utilization optimization based on real-time occupancy and activity detection.
Regulatory frameworks worldwide are accelerating market demand through building energy codes and sustainability requirements. Green building certification programs increasingly recognize advanced automation systems as essential components for achieving compliance. This regulatory push creates sustained demand for visual servoing solutions that can demonstrate measurable performance improvements and environmental benefits.
The integration of artificial intelligence and machine learning capabilities with visual servoing systems is expanding market applications beyond traditional building automation. Predictive maintenance, security enhancement, and occupant behavior analysis represent emerging use cases that building operators find increasingly valuable. These advanced applications justify higher system costs and drive premium market segment growth.
Market adoption patterns indicate strong preference for scalable visual control solutions that can integrate with existing building management systems. Retrofit applications in older buildings present significant opportunities, as property owners seek to modernize facilities without complete infrastructure replacement. This retrofit market segment values visual servoing systems that offer flexible deployment options and demonstrated return on investment.
Energy management constitutes the primary driver for smart building visual control system adoption. Commercial buildings account for substantial energy consumption worldwide, and stakeholders are under mounting pressure to implement sustainable practices. Visual servoing enables real-time monitoring and adjustment of lighting, HVAC systems, and window positioning based on occupancy patterns and environmental conditions, delivering measurable energy savings that justify initial investment costs.
The commercial real estate sector demonstrates particularly strong demand for visual control systems, especially in premium office buildings, shopping centers, and hospitality facilities. Property developers recognize that advanced automation features significantly enhance building value and tenant satisfaction. Modern tenants increasingly expect intelligent building services that adapt to their presence and preferences, creating competitive advantages for properties equipped with sophisticated visual servoing capabilities.
Healthcare and educational institutions represent rapidly expanding market segments for building automation visual control systems. These environments require precise environmental control for optimal performance and safety. Visual servoing technology enables automated adjustment of lighting conditions, air quality management, and space utilization optimization based on real-time occupancy and activity detection.
Regulatory frameworks worldwide are accelerating market demand through building energy codes and sustainability requirements. Green building certification programs increasingly recognize advanced automation systems as essential components for achieving compliance. This regulatory push creates sustained demand for visual servoing solutions that can demonstrate measurable performance improvements and environmental benefits.
The integration of artificial intelligence and machine learning capabilities with visual servoing systems is expanding market applications beyond traditional building automation. Predictive maintenance, security enhancement, and occupant behavior analysis represent emerging use cases that building operators find increasingly valuable. These advanced applications justify higher system costs and drive premium market segment growth.
Market adoption patterns indicate strong preference for scalable visual control solutions that can integrate with existing building management systems. Retrofit applications in older buildings present significant opportunities, as property owners seek to modernize facilities without complete infrastructure replacement. This retrofit market segment values visual servoing systems that offer flexible deployment options and demonstrated return on investment.
Current State and Challenges of Visual Servoing in Buildings
Visual servoing technology in building automation has reached a significant maturity level, with numerous commercial implementations demonstrating its practical viability. Current systems primarily utilize RGB cameras, depth sensors, and infrared imaging to monitor and control various building functions including HVAC systems, lighting management, security surveillance, and occupancy detection. Major technology providers such as Honeywell, Siemens, and Johnson Controls have integrated basic visual feedback mechanisms into their building management systems, achieving real-time environmental monitoring and automated response capabilities.
The geographical distribution of visual servoing technology development shows concentrated advancement in North America, Europe, and East Asia. Silicon Valley companies lead in algorithm development and sensor integration, while European firms excel in energy-efficient implementations and regulatory compliance solutions. Asian manufacturers, particularly in Japan and South Korea, have pioneered miniaturized sensor systems and cost-effective deployment strategies for large-scale building applications.
Despite technological progress, several critical challenges continue to impede widespread adoption. Lighting variability remains a fundamental obstacle, as visual systems must maintain consistent performance across diverse illumination conditions throughout daily and seasonal cycles. Camera calibration and maintenance requirements create ongoing operational burdens, particularly in large commercial buildings where hundreds of sensors may require periodic adjustment and cleaning.
Integration complexity presents another significant barrier, as visual servoing systems must interface seamlessly with existing building automation protocols including BACnet, LonWorks, and Modbus. Legacy infrastructure compatibility issues often necessitate costly retrofitting or complete system replacements, limiting adoption in older buildings that represent a substantial portion of the commercial real estate market.
Computational resource constraints affect system scalability, as real-time image processing demands substantial processing power and network bandwidth. Edge computing solutions have emerged to address latency concerns, but deployment costs remain prohibitive for many applications. Privacy and security considerations also pose challenges, particularly in residential and mixed-use buildings where occupant surveillance raises ethical and legal concerns.
Environmental factors including dust accumulation, temperature fluctuations, and vibration can significantly impact sensor performance and longevity. Outdoor applications face additional challenges from weather exposure, requiring robust enclosures and specialized maintenance protocols. These factors collectively contribute to higher total cost of ownership compared to traditional sensor-based automation systems.
Current research efforts focus on developing more robust computer vision algorithms capable of handling adverse conditions, implementing distributed processing architectures to reduce computational bottlenecks, and creating standardized integration frameworks to simplify deployment across diverse building types and automation platforms.
The geographical distribution of visual servoing technology development shows concentrated advancement in North America, Europe, and East Asia. Silicon Valley companies lead in algorithm development and sensor integration, while European firms excel in energy-efficient implementations and regulatory compliance solutions. Asian manufacturers, particularly in Japan and South Korea, have pioneered miniaturized sensor systems and cost-effective deployment strategies for large-scale building applications.
Despite technological progress, several critical challenges continue to impede widespread adoption. Lighting variability remains a fundamental obstacle, as visual systems must maintain consistent performance across diverse illumination conditions throughout daily and seasonal cycles. Camera calibration and maintenance requirements create ongoing operational burdens, particularly in large commercial buildings where hundreds of sensors may require periodic adjustment and cleaning.
Integration complexity presents another significant barrier, as visual servoing systems must interface seamlessly with existing building automation protocols including BACnet, LonWorks, and Modbus. Legacy infrastructure compatibility issues often necessitate costly retrofitting or complete system replacements, limiting adoption in older buildings that represent a substantial portion of the commercial real estate market.
Computational resource constraints affect system scalability, as real-time image processing demands substantial processing power and network bandwidth. Edge computing solutions have emerged to address latency concerns, but deployment costs remain prohibitive for many applications. Privacy and security considerations also pose challenges, particularly in residential and mixed-use buildings where occupant surveillance raises ethical and legal concerns.
Environmental factors including dust accumulation, temperature fluctuations, and vibration can significantly impact sensor performance and longevity. Outdoor applications face additional challenges from weather exposure, requiring robust enclosures and specialized maintenance protocols. These factors collectively contribute to higher total cost of ownership compared to traditional sensor-based automation systems.
Current research efforts focus on developing more robust computer vision algorithms capable of handling adverse conditions, implementing distributed processing architectures to reduce computational bottlenecks, and creating standardized integration frameworks to simplify deployment across diverse building types and automation platforms.
Current Visual Servoing Solutions for Building Systems
01 Image-based visual servoing control methods
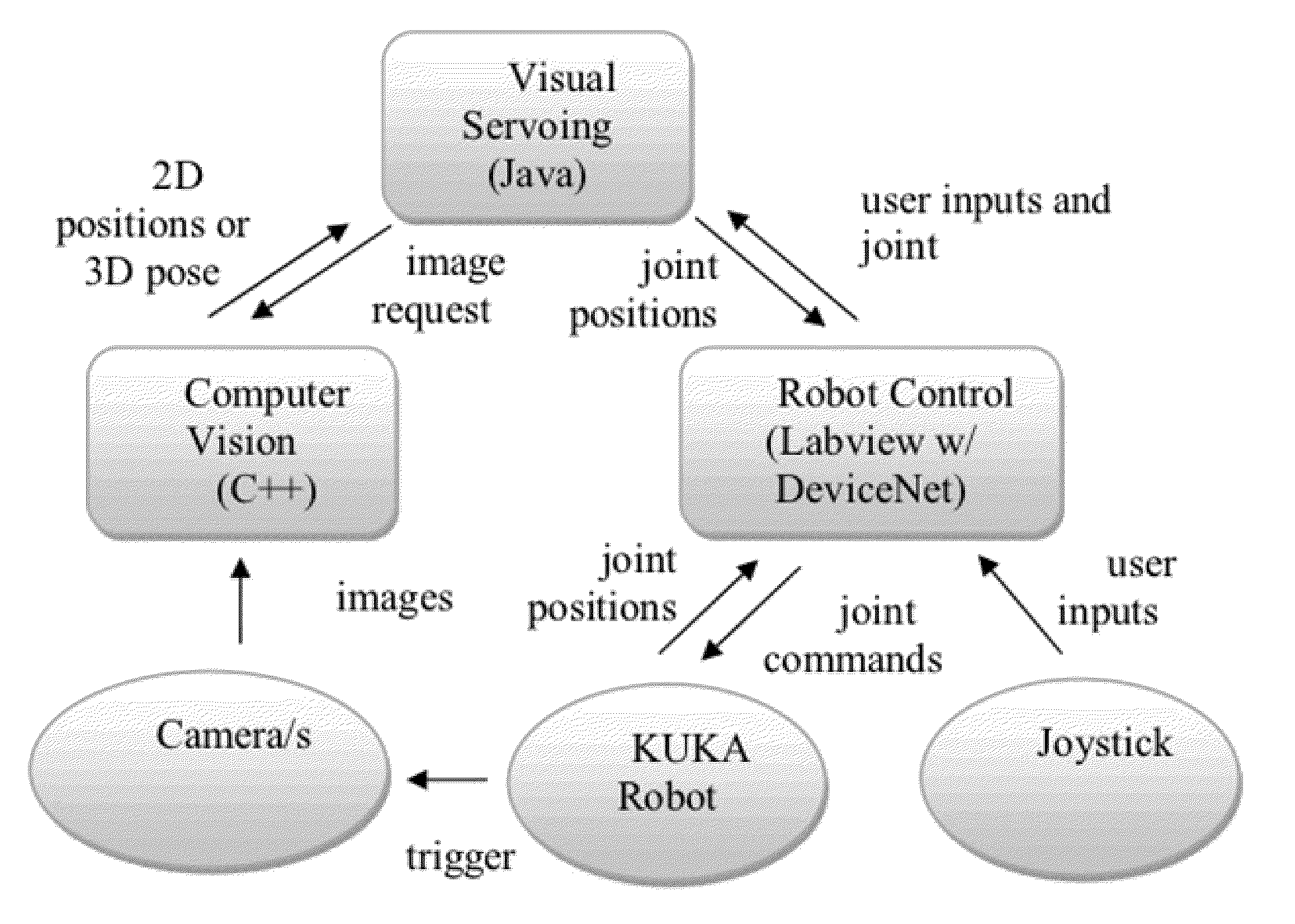
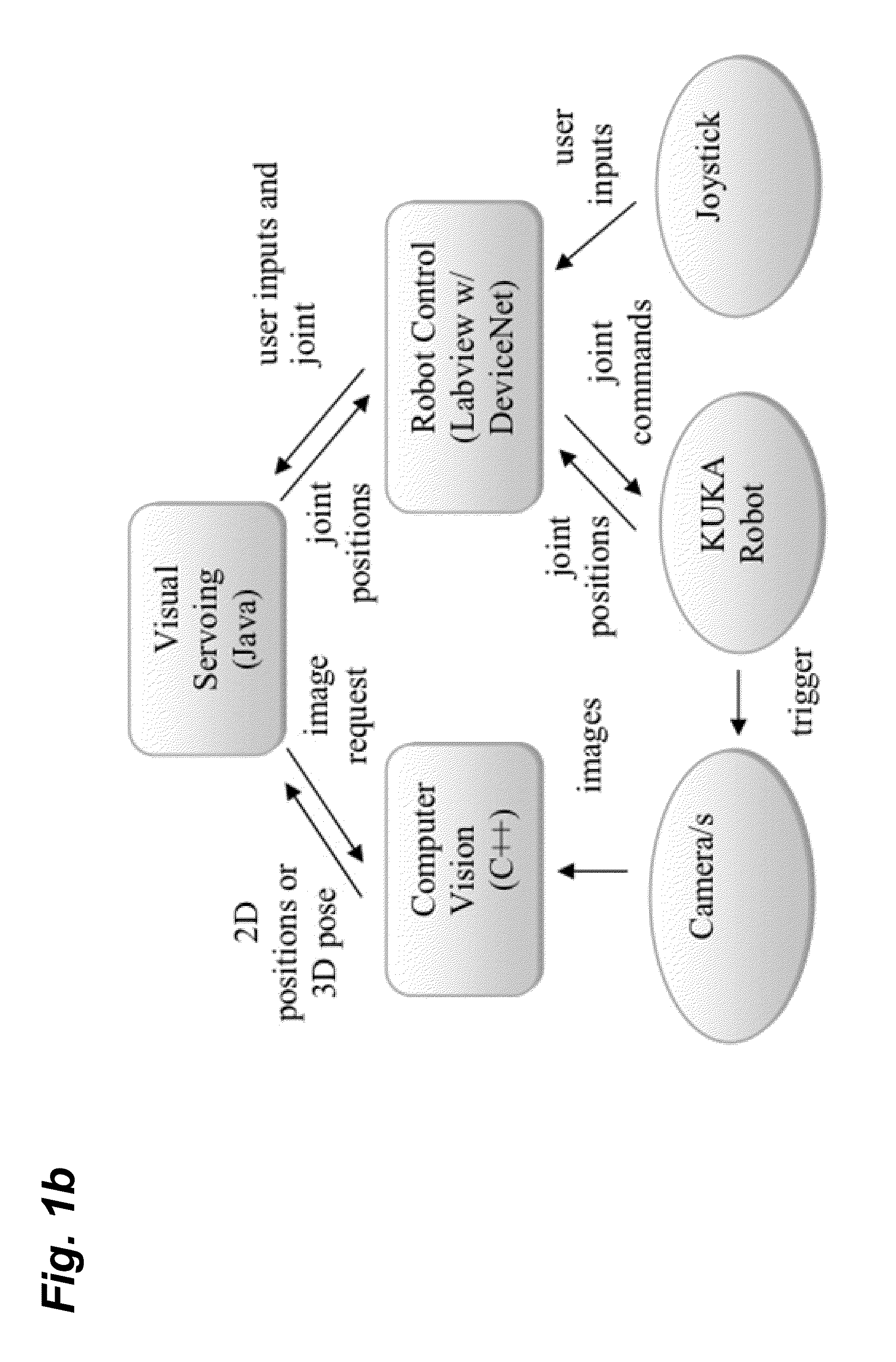
Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.- Image-based visual servoing control methods: Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.
- Position-based visual servoing with 3D pose estimation: This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.
- Visual servoing for robotic manipulation and grasping: Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying positions, orientations, or shapes. These methods often incorporate feature detection, tracking algorithms, and motion planning to achieve reliable manipulation performance in dynamic environments.
- Multi-camera and stereo visual servoing systems: Advanced visual servoing implementations employ multiple cameras or stereo vision configurations to enhance depth perception and expand the field of view. These systems fuse information from multiple viewpoints to improve tracking accuracy, handle occlusions, and provide more robust control. The multi-camera approach enables better spatial understanding and can support more complex servoing tasks in three-dimensional environments.
- Deep learning and AI-enhanced visual servoing: Modern visual servoing systems integrate deep learning and artificial intelligence techniques to improve feature extraction, object recognition, and control performance. Neural networks are employed for robust visual tracking, pose estimation, and adaptive control in challenging conditions. These intelligent systems can learn from experience, handle complex visual scenes, and adapt to variations in lighting, occlusions, and object appearances without explicit programming.
02 Position-based visual servoing with 3D pose estimation
This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.Expand Specific Solutions03 Visual servoing for robotic manipulation and grasping
Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying positions, orientations, or shapes. These methods often incorporate feature detection, tracking algorithms, and trajectory planning to achieve smooth and accurate manipulation movements.Expand Specific Solutions04 Multi-camera and stereo visual servoing systems
Advanced visual servoing implementations utilize multiple cameras or stereo vision configurations to enhance depth perception and expand the field of view. These systems fuse information from multiple viewpoints to improve tracking robustness, handle occlusions, and provide more accurate spatial measurements. The multi-camera approach enables better performance in complex environments and improves system reliability during dynamic operations.Expand Specific Solutions05 Deep learning and AI-enhanced visual servoing
Modern visual servoing systems incorporate deep learning and artificial intelligence techniques to improve feature extraction, object recognition, and control performance. Neural networks are trained to identify relevant visual features, predict object motion, or directly learn control policies from visual input. These intelligent approaches enable visual servoing systems to handle more complex scenarios, adapt to varying conditions, and achieve higher accuracy with reduced manual calibration requirements.Expand Specific Solutions
Key Players in Visual Servoing and Building Automation
The visual servoing market for building automation is experiencing rapid growth, driven by increasing demand for smart building solutions and energy efficiency. The industry is in an expansion phase with significant market potential, as urbanization and IoT adoption accelerate automation needs. Technology maturity varies considerably across market players. Established automation giants like ABB Ltd., Siemens AG, and FANUC Corp. demonstrate high technical sophistication with integrated robotics and control systems. Technology consultants such as IBM and Tata Consultancy Services provide advanced AI and machine learning capabilities for visual processing. Meanwhile, companies like Johnson Controls and Rockwell Automation offer specialized building management platforms. Emerging players like Candela IoT focus specifically on building automation software solutions. The competitive landscape shows a mix of mature industrial automation leaders leveraging decades of experience alongside innovative software companies developing next-generation visual servoing applications for smart buildings.
ABB Ltd.
Technical Solution: ABB has developed comprehensive visual servoing solutions for building automation through their System 800xA platform, integrating advanced computer vision algorithms with distributed control systems. Their approach utilizes real-time image processing capabilities combined with machine learning algorithms to enable automated monitoring and control of HVAC systems, lighting controls, and security systems. The visual servoing implementation includes adaptive tracking algorithms that can automatically adjust building parameters based on occupancy detection, environmental conditions, and energy optimization requirements. ABB's solution incorporates edge computing capabilities to process visual data locally, reducing latency and improving system responsiveness for critical building automation tasks.
Strengths: Extensive industrial automation experience and robust distributed control systems. Weaknesses: Higher implementation costs and complexity for smaller building applications.
FANUC Corp.
Technical Solution: FANUC has developed visual servoing solutions primarily focused on industrial building automation applications, leveraging their expertise in robotics and machine vision systems. Their implementation combines high-precision visual tracking with automated control systems for manufacturing facility management, including automated material handling, quality inspection, and environmental monitoring. The visual servoing technology incorporates real-time image processing algorithms that can detect and respond to changes in industrial building environments, such as equipment positioning, safety compliance monitoring, and automated workflow optimization. FANUC's system utilizes robust industrial-grade cameras and processing units designed to operate reliably in challenging industrial building environments with advanced motion control integration.
Strengths: Proven industrial-grade reliability and precision in harsh environments. Weaknesses: Limited focus on commercial building applications and higher costs for non-industrial use cases.
Core Visual Servoing Patents and Technical Innovations
Systems and methods for real time visual servoing using a differentiable model predictive control framework
PatentActiveIN202121044482A
Innovation
- A differentiable model predictive control framework is implemented using a processor-based method that generates optimal control commands by iteratively minimizing predicted optical flow losses, with a flow normalization layer and a neural network trained for on-the-fly adaptation, enabling real-time visual servoing.




Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Building Codes and Standards for Visual Automation
The integration of visual servoing technologies into building automation systems necessitates comprehensive regulatory frameworks that address safety, performance, and interoperability standards. Current building codes primarily focus on traditional automation systems, creating a regulatory gap for vision-based control technologies that require specialized guidelines for deployment and operation.
International standards organizations have begun developing frameworks specifically for visual automation systems. The International Organization for Standardization (ISO) has introduced preliminary guidelines under ISO 16484 series for building automation and control systems, with recent amendments addressing sensor-based control mechanisms. The European Committee for Standardization (CEN) has similarly established EN 15232 standards that incorporate provisions for advanced sensing technologies in energy performance assessments.
Safety regulations represent a critical component of visual automation standards, particularly concerning privacy protection and data security. The General Data Protection Regulation (GDPR) in Europe and similar privacy laws globally impose strict requirements on visual data collection and processing in building environments. These regulations mandate explicit consent mechanisms, data minimization principles, and secure storage protocols for visual information captured by automation systems.
Performance standards for visual servoing systems focus on accuracy, reliability, and response time requirements. The American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE) has developed testing protocols under Standard 135 that evaluate the precision of vision-based control systems in maintaining environmental parameters. These standards specify minimum accuracy thresholds and maximum response delays for critical building functions.
Interoperability standards ensure seamless integration between visual servoing components and existing building management systems. The BACnet protocol has been extended to accommodate visual sensor data formats, while the Open Building Information Exchange (oBIX) standard provides frameworks for visual automation data exchange across different platforms and vendors.
Emerging regulatory trends indicate increasing emphasis on cybersecurity standards for visual automation systems. The National Institute of Standards and Technology (NIST) has proposed cybersecurity frameworks specifically addressing vision-based building controls, focusing on secure communication protocols and intrusion detection mechanisms for visual sensor networks.
International standards organizations have begun developing frameworks specifically for visual automation systems. The International Organization for Standardization (ISO) has introduced preliminary guidelines under ISO 16484 series for building automation and control systems, with recent amendments addressing sensor-based control mechanisms. The European Committee for Standardization (CEN) has similarly established EN 15232 standards that incorporate provisions for advanced sensing technologies in energy performance assessments.
Safety regulations represent a critical component of visual automation standards, particularly concerning privacy protection and data security. The General Data Protection Regulation (GDPR) in Europe and similar privacy laws globally impose strict requirements on visual data collection and processing in building environments. These regulations mandate explicit consent mechanisms, data minimization principles, and secure storage protocols for visual information captured by automation systems.
Performance standards for visual servoing systems focus on accuracy, reliability, and response time requirements. The American Society of Heating, Refrigerating and Air-Conditioning Engineers (ASHRAE) has developed testing protocols under Standard 135 that evaluate the precision of vision-based control systems in maintaining environmental parameters. These standards specify minimum accuracy thresholds and maximum response delays for critical building functions.
Interoperability standards ensure seamless integration between visual servoing components and existing building management systems. The BACnet protocol has been extended to accommodate visual sensor data formats, while the Open Building Information Exchange (oBIX) standard provides frameworks for visual automation data exchange across different platforms and vendors.
Emerging regulatory trends indicate increasing emphasis on cybersecurity standards for visual automation systems. The National Institute of Standards and Technology (NIST) has proposed cybersecurity frameworks specifically addressing vision-based building controls, focusing on secure communication protocols and intrusion detection mechanisms for visual sensor networks.
Energy Efficiency Impact of Visual Servoing Systems
Visual servoing systems in building automation demonstrate significant potential for improving energy efficiency through intelligent control mechanisms and optimized resource management. These systems leverage real-time visual feedback to enhance the precision of automated building operations, resulting in measurable reductions in energy consumption across multiple building subsystems.
The primary energy efficiency gains from visual servoing implementation stem from enhanced HVAC system control. Traditional building automation relies on predetermined schedules and basic sensor inputs, often leading to overcooling or overheating of spaces. Visual servoing systems can detect actual occupancy patterns, lighting conditions, and spatial usage through computer vision, enabling dynamic adjustment of temperature and ventilation systems. Studies indicate that such implementations can reduce HVAC energy consumption by 15-25% compared to conventional building management systems.
Lighting control represents another significant area of energy impact. Visual servoing systems can automatically adjust artificial lighting based on natural light availability, occupancy detection, and task-specific requirements. By continuously monitoring visual conditions and occupant behavior, these systems eliminate unnecessary lighting usage while maintaining optimal illumination levels. This approach typically achieves energy savings of 20-35% in commercial building lighting systems.
Window and shading automation through visual servoing contributes substantially to thermal management efficiency. These systems can automatically adjust blinds, curtains, or smart glass based on solar angle, internal temperature conditions, and glare detection. By optimizing natural light utilization while minimizing heat gain, visual servoing-controlled shading systems can reduce overall building energy loads by 8-15%.
The integration of visual servoing with building envelope management systems offers additional efficiency benefits. Real-time monitoring of building exterior conditions enables predictive control of ventilation systems, reducing energy waste from unnecessary air exchange while maintaining indoor air quality standards.
However, the energy efficiency impact must account for the computational and hardware requirements of visual servoing systems themselves. Modern implementations utilizing edge computing and efficient algorithms typically consume 2-4% of the total energy savings achieved, resulting in net positive energy performance. Advanced machine learning optimization can further reduce this overhead while improving system responsiveness and accuracy.
The primary energy efficiency gains from visual servoing implementation stem from enhanced HVAC system control. Traditional building automation relies on predetermined schedules and basic sensor inputs, often leading to overcooling or overheating of spaces. Visual servoing systems can detect actual occupancy patterns, lighting conditions, and spatial usage through computer vision, enabling dynamic adjustment of temperature and ventilation systems. Studies indicate that such implementations can reduce HVAC energy consumption by 15-25% compared to conventional building management systems.
Lighting control represents another significant area of energy impact. Visual servoing systems can automatically adjust artificial lighting based on natural light availability, occupancy detection, and task-specific requirements. By continuously monitoring visual conditions and occupant behavior, these systems eliminate unnecessary lighting usage while maintaining optimal illumination levels. This approach typically achieves energy savings of 20-35% in commercial building lighting systems.
Window and shading automation through visual servoing contributes substantially to thermal management efficiency. These systems can automatically adjust blinds, curtains, or smart glass based on solar angle, internal temperature conditions, and glare detection. By optimizing natural light utilization while minimizing heat gain, visual servoing-controlled shading systems can reduce overall building energy loads by 8-15%.
The integration of visual servoing with building envelope management systems offers additional efficiency benefits. Real-time monitoring of building exterior conditions enables predictive control of ventilation systems, reducing energy waste from unnecessary air exchange while maintaining indoor air quality standards.
However, the energy efficiency impact must account for the computational and hardware requirements of visual servoing systems themselves. Modern implementations utilizing edge computing and efficient algorithms typically consume 2-4% of the total energy savings achieved, resulting in net positive energy performance. Advanced machine learning optimization can further reduce this overhead while improving system responsiveness and accuracy.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!