

How to Implement Visual Servoing for Sustainable Transport
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing for Sustainable Transport Background and Objectives
Visual servoing technology has emerged as a critical enabler for sustainable transportation systems, representing the convergence of computer vision, robotics, and autonomous control systems. This technology utilizes real-time visual feedback from cameras and sensors to guide vehicle navigation, positioning, and control decisions, fundamentally transforming how transportation systems operate and interact with their environment.
The evolution of visual servoing in transportation traces back to early computer vision applications in the 1980s, initially focused on industrial automation. The technology gained momentum in the automotive sector during the 2000s with the introduction of advanced driver assistance systems (ADAS). Today, visual servoing has expanded beyond traditional automotive applications to encompass electric vehicles, autonomous public transit, drone delivery systems, and smart infrastructure management.
Current technological trends indicate a shift toward multi-modal sensor fusion, where visual servoing integrates with LiDAR, radar, and GPS systems to create comprehensive environmental awareness. Machine learning algorithms, particularly deep neural networks, have revolutionized object detection, path planning, and real-time decision-making capabilities. Edge computing advancements enable faster processing of visual data directly within vehicles, reducing latency and improving response times.
The primary objective of implementing visual servoing for sustainable transport centers on achieving carbon-neutral mobility through enhanced efficiency and safety. Key technical goals include developing robust perception systems capable of operating in diverse weather conditions and lighting scenarios, creating adaptive control algorithms that optimize energy consumption, and establishing vehicle-to-infrastructure communication protocols that enable coordinated traffic management.
Environmental sustainability objectives focus on reducing greenhouse gas emissions through optimized routing, improved traffic flow management, and support for electric and hybrid vehicle operations. Visual servoing systems aim to minimize energy waste by enabling precise vehicle positioning, reducing unnecessary acceleration and braking, and facilitating efficient charging station navigation for electric vehicles.
Safety and reliability targets encompass achieving fault-tolerant visual processing systems, developing redundant sensor configurations, and creating fail-safe mechanisms that ensure continued operation during sensor degradation. The technology seeks to eliminate human error factors while maintaining passenger confidence through transparent and predictable system behavior.
Integration objectives involve creating seamless interoperability between different transportation modes, enabling smart city infrastructure to communicate effectively with autonomous vehicles, and establishing standardized protocols for visual servoing implementations across various manufacturers and service providers.
The evolution of visual servoing in transportation traces back to early computer vision applications in the 1980s, initially focused on industrial automation. The technology gained momentum in the automotive sector during the 2000s with the introduction of advanced driver assistance systems (ADAS). Today, visual servoing has expanded beyond traditional automotive applications to encompass electric vehicles, autonomous public transit, drone delivery systems, and smart infrastructure management.
Current technological trends indicate a shift toward multi-modal sensor fusion, where visual servoing integrates with LiDAR, radar, and GPS systems to create comprehensive environmental awareness. Machine learning algorithms, particularly deep neural networks, have revolutionized object detection, path planning, and real-time decision-making capabilities. Edge computing advancements enable faster processing of visual data directly within vehicles, reducing latency and improving response times.
The primary objective of implementing visual servoing for sustainable transport centers on achieving carbon-neutral mobility through enhanced efficiency and safety. Key technical goals include developing robust perception systems capable of operating in diverse weather conditions and lighting scenarios, creating adaptive control algorithms that optimize energy consumption, and establishing vehicle-to-infrastructure communication protocols that enable coordinated traffic management.
Environmental sustainability objectives focus on reducing greenhouse gas emissions through optimized routing, improved traffic flow management, and support for electric and hybrid vehicle operations. Visual servoing systems aim to minimize energy waste by enabling precise vehicle positioning, reducing unnecessary acceleration and braking, and facilitating efficient charging station navigation for electric vehicles.
Safety and reliability targets encompass achieving fault-tolerant visual processing systems, developing redundant sensor configurations, and creating fail-safe mechanisms that ensure continued operation during sensor degradation. The technology seeks to eliminate human error factors while maintaining passenger confidence through transparent and predictable system behavior.
Integration objectives involve creating seamless interoperability between different transportation modes, enabling smart city infrastructure to communicate effectively with autonomous vehicles, and establishing standardized protocols for visual servoing implementations across various manufacturers and service providers.
Market Demand for Autonomous Sustainable Transportation Systems
The global transportation sector is experiencing unprecedented transformation driven by environmental regulations, urbanization pressures, and technological advancement convergence. Autonomous sustainable transportation systems represent a critical intersection of artificial intelligence, renewable energy integration, and mobility-as-a-service paradigms. This market emergence stems from mounting concerns over carbon emissions, traffic congestion, and the need for efficient urban mobility solutions.
Government initiatives worldwide are accelerating market demand through regulatory frameworks and financial incentives. The European Union's Green Deal and similar policies in North America and Asia-Pacific regions mandate significant reductions in transportation emissions by 2030. These regulatory pressures create substantial market pull for autonomous electric vehicles, smart public transit systems, and integrated mobility platforms that leverage visual servoing technologies for precise navigation and energy optimization.
Urban population growth intensifies demand for intelligent transportation solutions. Megacities require sophisticated traffic management systems capable of real-time adaptation and optimization. Visual servoing enables autonomous vehicles to navigate complex urban environments while minimizing energy consumption through optimal path planning and traffic flow coordination. This technology becomes essential for sustainable transportation systems operating in dense urban corridors.
Commercial fleet operators represent a significant demand driver, seeking operational cost reduction and regulatory compliance. Logistics companies, ride-sharing services, and public transportation authorities require autonomous systems that can operate efficiently while meeting sustainability targets. Visual servoing technology enables precise vehicle positioning, reducing energy waste from unnecessary maneuvers and optimizing charging station utilization for electric fleets.
Consumer acceptance of autonomous vehicles continues growing, particularly when combined with environmental benefits. Market research indicates increasing willingness to adopt sustainable transportation options that offer convenience and reliability. Visual servoing enhances user confidence by providing precise, predictable vehicle behavior essential for widespread adoption.
The integration of renewable energy sources with transportation infrastructure creates additional market opportunities. Smart charging networks, solar-powered transit systems, and wind-integrated transportation hubs require sophisticated control systems where visual servoing plays a crucial role in optimizing energy utilization and system coordination.
Investment flows from both public and private sectors indicate robust market confidence. Venture capital, government grants, and corporate research budgets increasingly target autonomous sustainable transportation technologies, validating long-term market potential and commercial viability expectations.
Government initiatives worldwide are accelerating market demand through regulatory frameworks and financial incentives. The European Union's Green Deal and similar policies in North America and Asia-Pacific regions mandate significant reductions in transportation emissions by 2030. These regulatory pressures create substantial market pull for autonomous electric vehicles, smart public transit systems, and integrated mobility platforms that leverage visual servoing technologies for precise navigation and energy optimization.
Urban population growth intensifies demand for intelligent transportation solutions. Megacities require sophisticated traffic management systems capable of real-time adaptation and optimization. Visual servoing enables autonomous vehicles to navigate complex urban environments while minimizing energy consumption through optimal path planning and traffic flow coordination. This technology becomes essential for sustainable transportation systems operating in dense urban corridors.
Commercial fleet operators represent a significant demand driver, seeking operational cost reduction and regulatory compliance. Logistics companies, ride-sharing services, and public transportation authorities require autonomous systems that can operate efficiently while meeting sustainability targets. Visual servoing technology enables precise vehicle positioning, reducing energy waste from unnecessary maneuvers and optimizing charging station utilization for electric fleets.
Consumer acceptance of autonomous vehicles continues growing, particularly when combined with environmental benefits. Market research indicates increasing willingness to adopt sustainable transportation options that offer convenience and reliability. Visual servoing enhances user confidence by providing precise, predictable vehicle behavior essential for widespread adoption.
The integration of renewable energy sources with transportation infrastructure creates additional market opportunities. Smart charging networks, solar-powered transit systems, and wind-integrated transportation hubs require sophisticated control systems where visual servoing plays a crucial role in optimizing energy utilization and system coordination.
Investment flows from both public and private sectors indicate robust market confidence. Venture capital, government grants, and corporate research budgets increasingly target autonomous sustainable transportation technologies, validating long-term market potential and commercial viability expectations.
Current State and Challenges of Visual Servoing in Green Mobility
Visual servoing technology in green mobility applications has reached a significant maturity level, with successful implementations across various sustainable transport systems. Current deployments span autonomous electric vehicles, smart public transit systems, and automated charging infrastructure. Electric bus fleets in major cities utilize visual servoing for precise docking at charging stations, while autonomous electric shuttles employ real-time visual feedback for navigation in dedicated lanes. The technology has demonstrated particular effectiveness in controlled environments such as bus rapid transit systems and automated parking facilities.
The integration of visual servoing with sustainable transport faces several critical technical challenges that limit widespread adoption. Real-time processing requirements demand substantial computational resources, creating conflicts with energy efficiency goals essential for green mobility systems. Weather-dependent performance remains a significant constraint, as rain, fog, and varying lighting conditions can severely degrade visual sensor accuracy. Current systems struggle with dynamic outdoor environments where lighting changes rapidly and visual occlusion occurs frequently.
Hardware limitations present another major obstacle in sustainable transport applications. Existing camera systems and processing units consume considerable power, reducing the operational range of electric vehicles. The computational load required for complex visual algorithms conflicts with the energy conservation priorities of green mobility solutions. Additionally, the cost of high-performance visual processing hardware remains prohibitive for mass deployment in public transportation systems.
Environmental robustness represents a persistent challenge for visual servoing systems in transport applications. Dust, debris, and weather-related sensor degradation require frequent maintenance and calibration procedures. The technology's reliability decreases significantly in adverse weather conditions, limiting its effectiveness during critical operational periods. Current solutions lack the adaptive capabilities needed to maintain consistent performance across diverse environmental conditions.
Integration complexity with existing transport infrastructure poses additional implementation barriers. Legacy systems in public transportation networks often lack the standardized interfaces required for seamless visual servoing integration. The heterogeneous nature of transport environments demands customized solutions that increase development costs and deployment timelines. Standardization efforts remain fragmented across different transport modalities and geographic regions.
Safety certification and regulatory compliance present ongoing challenges for visual servoing deployment in sustainable transport. Current safety standards for autonomous systems require extensive testing and validation procedures that slow technology adoption. The lack of unified international standards creates barriers for cross-border transport applications and limits scalability potential.
The integration of visual servoing with sustainable transport faces several critical technical challenges that limit widespread adoption. Real-time processing requirements demand substantial computational resources, creating conflicts with energy efficiency goals essential for green mobility systems. Weather-dependent performance remains a significant constraint, as rain, fog, and varying lighting conditions can severely degrade visual sensor accuracy. Current systems struggle with dynamic outdoor environments where lighting changes rapidly and visual occlusion occurs frequently.
Hardware limitations present another major obstacle in sustainable transport applications. Existing camera systems and processing units consume considerable power, reducing the operational range of electric vehicles. The computational load required for complex visual algorithms conflicts with the energy conservation priorities of green mobility solutions. Additionally, the cost of high-performance visual processing hardware remains prohibitive for mass deployment in public transportation systems.
Environmental robustness represents a persistent challenge for visual servoing systems in transport applications. Dust, debris, and weather-related sensor degradation require frequent maintenance and calibration procedures. The technology's reliability decreases significantly in adverse weather conditions, limiting its effectiveness during critical operational periods. Current solutions lack the adaptive capabilities needed to maintain consistent performance across diverse environmental conditions.
Integration complexity with existing transport infrastructure poses additional implementation barriers. Legacy systems in public transportation networks often lack the standardized interfaces required for seamless visual servoing integration. The heterogeneous nature of transport environments demands customized solutions that increase development costs and deployment timelines. Standardization efforts remain fragmented across different transport modalities and geographic regions.
Safety certification and regulatory compliance present ongoing challenges for visual servoing deployment in sustainable transport. Current safety standards for autonomous systems require extensive testing and validation procedures that slow technology adoption. The lack of unified international standards creates barriers for cross-border transport applications and limits scalability potential.
Existing Visual Servoing Solutions for Eco-Friendly Vehicles
01 Image-based visual servoing control methods
Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate robot movements.- Image-based visual servoing control methods: Visual servoing systems utilize image-based control approaches where visual features extracted directly from camera images are used as feedback signals to control robot motion. These methods process visual information in real-time to compute control commands, enabling precise positioning and tracking without requiring complete 3D reconstruction. The control loop operates directly in image space, comparing current and desired image features to generate appropriate motion commands.
- Position-based visual servoing with 3D pose estimation: This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this pose information to control robotic systems. The method reconstructs spatial relationships between the camera, robot, and target objects, enabling precise manipulation and navigation tasks. Pose estimation algorithms process visual features to determine position and orientation in Cartesian space, which is then used for trajectory planning and control.
- Visual servoing for robotic manipulation and grasping: Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. These systems use visual feedback to adjust gripper position and orientation in real-time, enabling adaptive grasping of objects with varying shapes, sizes, and positions. The integration of vision sensors with robotic manipulators allows for flexible automation in manufacturing, assembly, and material handling applications.
- Deep learning and AI-enhanced visual servoing: Modern visual servoing systems incorporate deep learning algorithms and artificial intelligence to improve feature detection, object recognition, and control performance. Neural networks are trained to extract robust visual features and predict optimal control actions, enhancing system adaptability to complex environments and varying lighting conditions. These intelligent approaches enable learning-based control strategies that can handle uncertainties and improve over time through experience.
- Multi-camera and stereo visual servoing systems: Advanced visual servoing implementations utilize multiple cameras or stereo vision configurations to obtain comprehensive spatial information and improve control accuracy. These systems provide enhanced depth perception and wider field of view, enabling more robust tracking and control in three-dimensional space. Multi-view approaches help overcome occlusion problems and improve measurement reliability through redundant visual information from different perspectives.
02 Position-based visual servoing with 3D pose estimation
This approach involves estimating the three-dimensional pose of objects or targets from visual data and using this information to control robot positioning. The system reconstructs spatial relationships between the camera, robot, and target objects, then computes control commands in Cartesian space. This method provides intuitive control in the workspace and can handle complex manipulation tasks requiring precise spatial coordination.Expand Specific Solutions03 Visual servoing for robotic manipulation and grasping
Visual servoing techniques are applied to guide robotic arms and end-effectors for object manipulation tasks. The system uses visual feedback to approach, grasp, and manipulate objects with high precision. These methods often incorporate object recognition, pose estimation, and trajectory planning to enable robots to interact with objects in unstructured environments, adapting to variations in object position and orientation.Expand Specific Solutions04 Hybrid and adaptive visual servoing systems
Advanced visual servoing architectures combine multiple control strategies or adapt their behavior based on task requirements and environmental conditions. These systems may switch between image-based and position-based approaches, incorporate learning algorithms to improve performance over time, or adjust control parameters dynamically. Such flexibility enables robust operation across diverse scenarios and improves system performance in the presence of uncertainties and disturbances.Expand Specific Solutions05 Visual servoing with deep learning and AI integration
Modern visual servoing systems integrate artificial intelligence and deep learning techniques to enhance perception and control capabilities. Neural networks are employed for feature extraction, object detection, and scene understanding, enabling more robust performance in complex environments. These intelligent systems can handle occlusions, lighting variations, and dynamic scenes more effectively than traditional methods, and may learn optimal control policies through reinforcement learning or imitation learning approaches.Expand Specific Solutions
Key Players in Visual Servoing and Sustainable Transport Industry
The visual servoing technology for sustainable transport is in a rapidly evolving growth phase, driven by increasing demand for autonomous vehicles and smart transportation systems. The market demonstrates significant expansion potential, particularly in electric and autonomous vehicle segments. Technology maturity varies considerably across key players: established automotive giants like Robert Bosch GmbH, Honda Motor Co., and Siemens AG possess advanced sensor integration capabilities, while tech leaders NVIDIA Corp. and QUALCOMM Inc. provide essential AI processing platforms. Traditional automakers including Nissan North America, BYD Co., and Zhejiang Geely Holding Group are actively integrating visual servoing into their sustainable vehicle platforms. Research institutions like Beihang University and South China University of Technology contribute foundational algorithms, while emerging companies such as Labrador Systems and Misapplied Sciences drive innovation in specialized applications. The competitive landscape shows convergence between automotive, technology, and research sectors, indicating strong technological momentum toward commercial deployment.
Robert Bosch GmbH
Technical Solution: Bosch develops visual servoing systems through their integrated camera-based driver assistance technologies, focusing on energy-efficient implementations for sustainable transport. Their approach combines stereo vision cameras with radar sensors to create robust visual feedback loops for automated parking, lane keeping, and adaptive cruise control. The system utilizes lightweight computer vision algorithms optimized for automotive-grade processors, enabling real-time visual tracking while minimizing computational overhead. Bosch's visual servoing solution emphasizes fail-safe operation and seamless integration with existing vehicle electronic control units, supporting both conventional and electric vehicle platforms through modular hardware architectures.
Strengths: Proven automotive-grade reliability with extensive real-world testing and regulatory compliance. Weaknesses: Limited to predefined scenarios and may struggle with novel or unexpected visual conditions.
Honda Motor Co., Ltd.
Technical Solution: Honda implements visual servoing in their SENSING suite, utilizing monocular and stereo camera systems for collision mitigation and traffic jam assist functions. Their approach focuses on lightweight algorithms that can operate efficiently on standard automotive processors, supporting sustainable transport through optimized fuel consumption and reduced emissions. The system employs template matching and optical flow techniques for vehicle tracking and lane detection, integrated with Honda's hybrid powertrain control systems. Their visual servoing implementation emphasizes smooth vehicle dynamics and passenger comfort while maintaining energy efficiency through predictive control algorithms that anticipate traffic patterns and optimize acceleration profiles.
Strengths: Well-integrated with hybrid powertrain systems for optimal energy efficiency and smooth operation. Weaknesses: Primarily focused on highway scenarios with limited capability in complex urban environments.
Core Innovations in Real-Time Visual Control Systems
Hybrid visual servoing method based on fusion of distance space and image feature space
PatentActiveUS20210252700A1
Innovation
- A hybrid visual servoing method that combines distance space information from high-precision sensors with image feature space information, constructing a hybrid Jacobian matrix through image and depth Jacobian matrices to enable precise robot motion control and comprehensive environmental perception.




Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
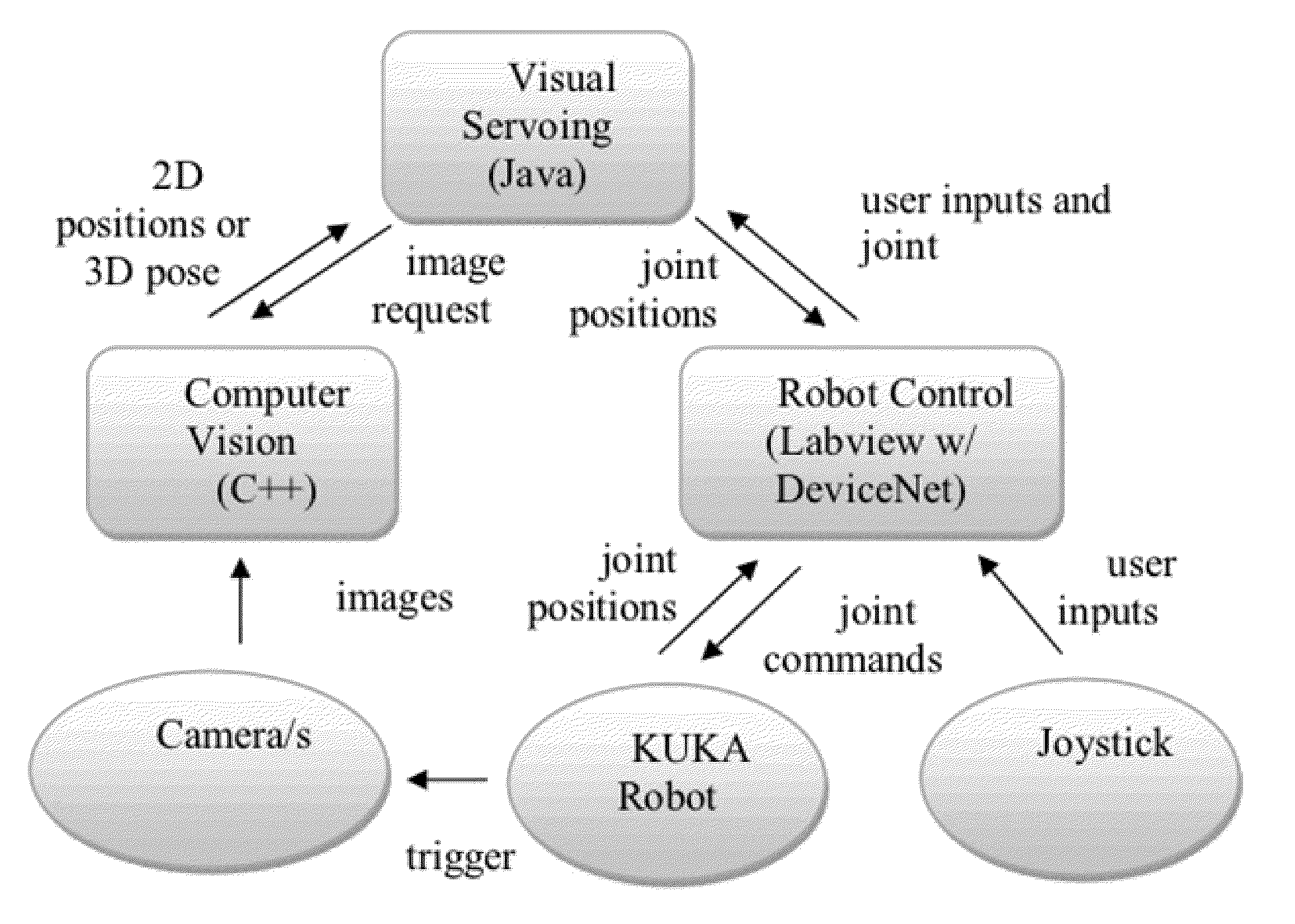
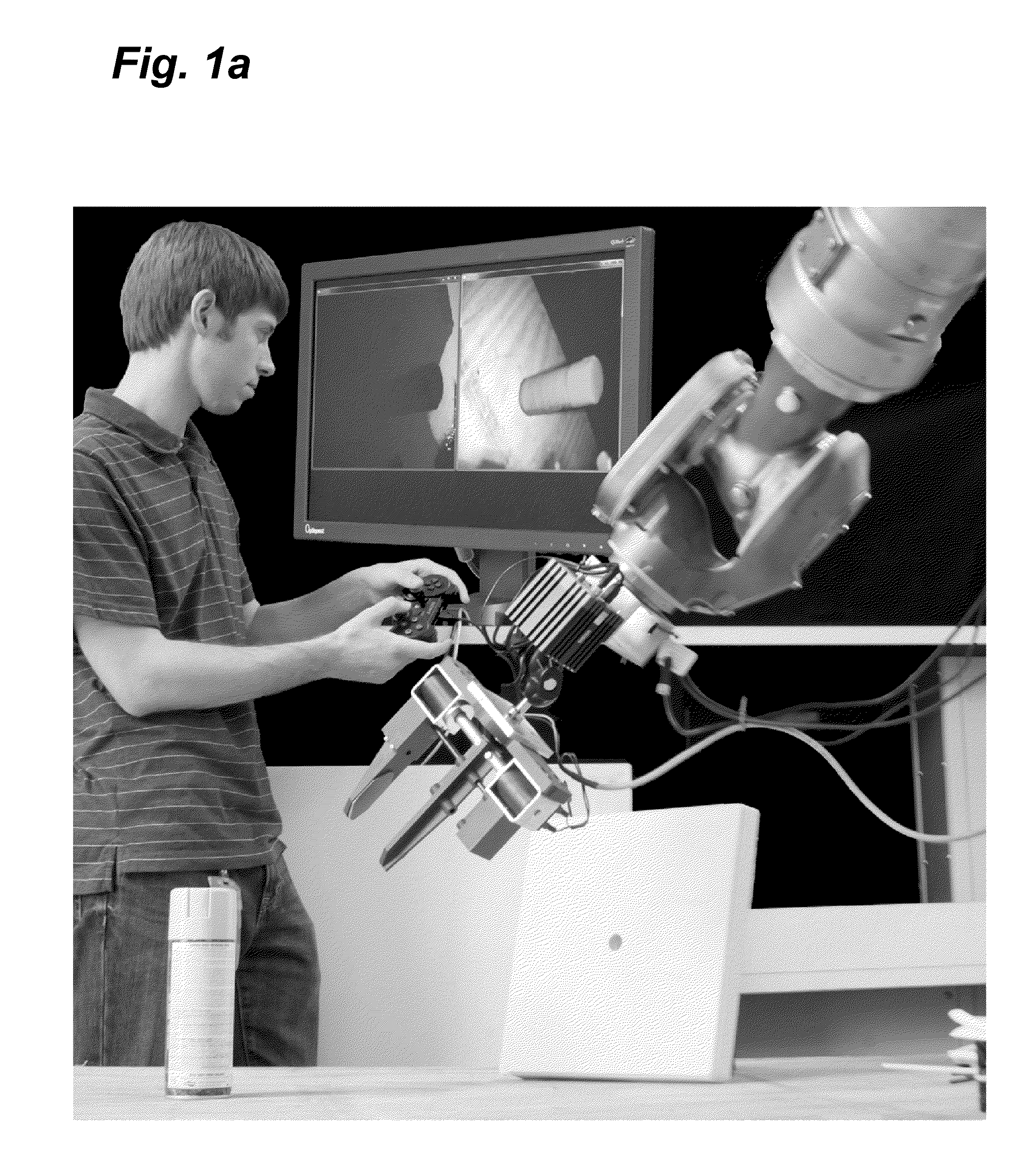
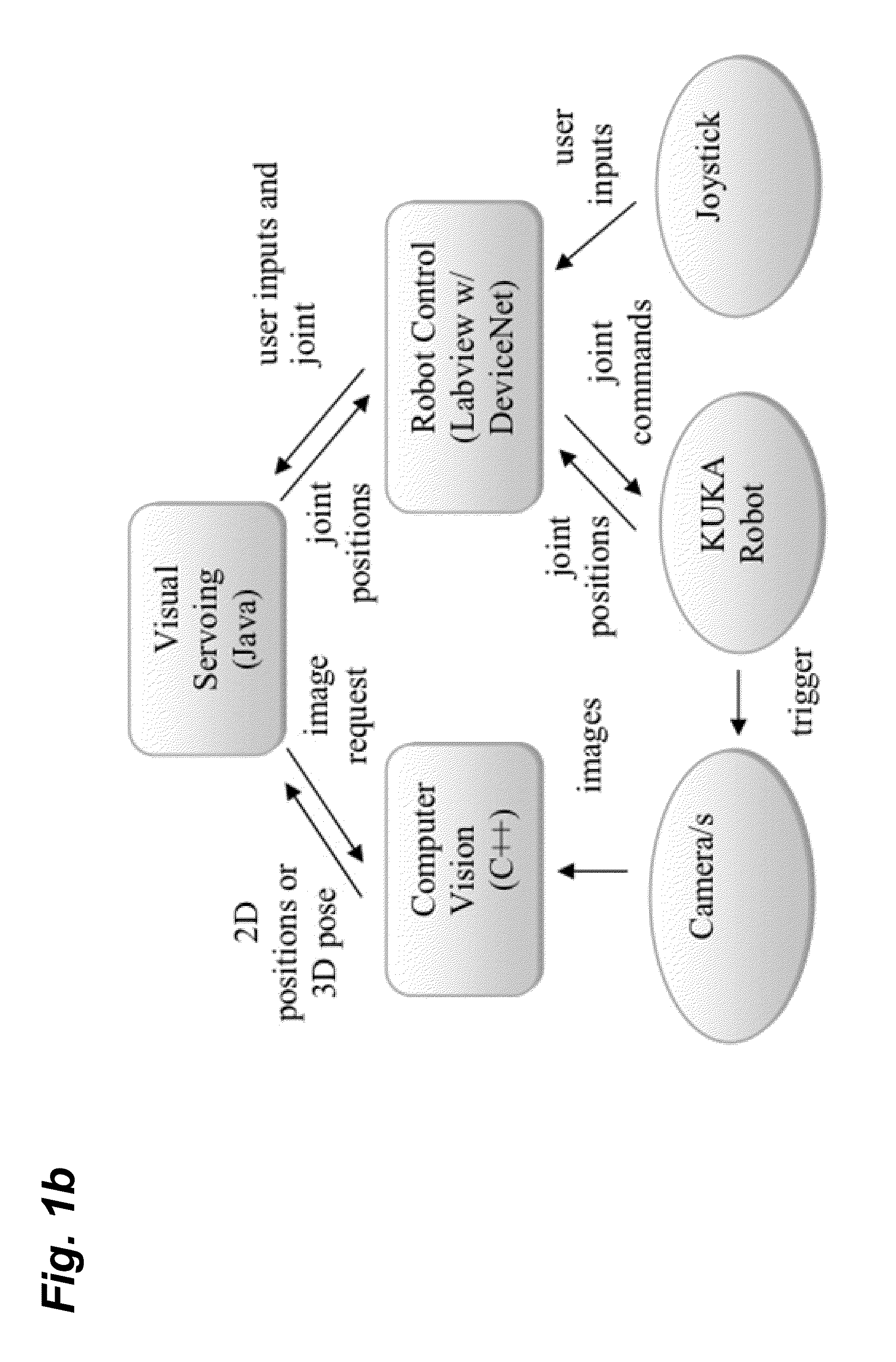
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Environmental Impact Assessment of Visual Servoing Systems
Visual servoing systems in sustainable transport applications present a complex environmental profile that requires comprehensive assessment across multiple impact categories. The primary environmental benefits stem from the technology's ability to optimize vehicle operations, reduce energy consumption, and minimize emissions through precise autonomous control mechanisms. These systems enable more efficient route planning, smoother acceleration and deceleration patterns, and reduced traffic congestion, collectively contributing to lower carbon footprints in transportation networks.
The manufacturing phase of visual servoing components introduces significant environmental considerations, particularly regarding the production of high-resolution cameras, processing units, and sensor arrays. The semiconductor manufacturing processes required for advanced image processing chips involve energy-intensive fabrication methods and the use of rare earth materials. Additionally, the precision optics and mechanical components demand specialized manufacturing techniques that contribute to the overall environmental burden during the production lifecycle.
Energy consumption patterns during operational phases vary considerably based on system complexity and computational requirements. Real-time image processing algorithms require substantial computational power, leading to increased energy demands that must be balanced against the efficiency gains achieved through optimized vehicle control. The environmental impact assessment must consider both direct energy consumption by the visual servoing hardware and indirect benefits from improved vehicle efficiency and reduced fuel consumption.
End-of-life considerations present unique challenges for visual servoing systems, as the rapid technological advancement in this field leads to shorter replacement cycles. The electronic components contain valuable materials that require proper recycling protocols, while the integration of these systems into vehicle platforms complicates disassembly and material recovery processes. Sustainable design approaches must incorporate modular architectures that facilitate component reuse and recycling.
The broader systemic environmental impacts extend beyond individual vehicle applications to encompass infrastructure modifications and network effects. Visual servoing implementation may require enhanced road markings, standardized signage, and communication infrastructure that introduce additional environmental considerations. However, the potential for reduced infrastructure wear through optimized vehicle movements and decreased accident rates presents offsetting environmental benefits that must be quantified in comprehensive impact assessments.
The manufacturing phase of visual servoing components introduces significant environmental considerations, particularly regarding the production of high-resolution cameras, processing units, and sensor arrays. The semiconductor manufacturing processes required for advanced image processing chips involve energy-intensive fabrication methods and the use of rare earth materials. Additionally, the precision optics and mechanical components demand specialized manufacturing techniques that contribute to the overall environmental burden during the production lifecycle.
Energy consumption patterns during operational phases vary considerably based on system complexity and computational requirements. Real-time image processing algorithms require substantial computational power, leading to increased energy demands that must be balanced against the efficiency gains achieved through optimized vehicle control. The environmental impact assessment must consider both direct energy consumption by the visual servoing hardware and indirect benefits from improved vehicle efficiency and reduced fuel consumption.
End-of-life considerations present unique challenges for visual servoing systems, as the rapid technological advancement in this field leads to shorter replacement cycles. The electronic components contain valuable materials that require proper recycling protocols, while the integration of these systems into vehicle platforms complicates disassembly and material recovery processes. Sustainable design approaches must incorporate modular architectures that facilitate component reuse and recycling.
The broader systemic environmental impacts extend beyond individual vehicle applications to encompass infrastructure modifications and network effects. Visual servoing implementation may require enhanced road markings, standardized signage, and communication infrastructure that introduce additional environmental considerations. However, the potential for reduced infrastructure wear through optimized vehicle movements and decreased accident rates presents offsetting environmental benefits that must be quantified in comprehensive impact assessments.
Safety Standards and Regulations for Autonomous Transport
The implementation of visual servoing systems in sustainable transport necessitates adherence to comprehensive safety standards and regulatory frameworks that govern autonomous vehicle operations. Current regulatory landscapes vary significantly across jurisdictions, with the European Union's Type Approval Framework, the United States' Federal Motor Vehicle Safety Standards, and emerging ISO standards forming the foundation for autonomous transport safety requirements.
Safety-critical visual servoing systems must comply with functional safety standards, particularly ISO 26262 for road vehicles, which mandates rigorous hazard analysis and risk assessment procedures. These standards require visual servoing implementations to achieve specific Automotive Safety Integrity Levels, typically ASIL-C or ASIL-D for critical functions such as obstacle avoidance and lane keeping. The standard emphasizes systematic verification and validation processes throughout the development lifecycle.
Regulatory bodies are establishing specific requirements for sensor fusion systems that incorporate visual servoing technologies. The Society of Automotive Engineers has developed SAE J3016 standards defining automation levels, while the International Organization for Standardization is developing ISO 21448 for Safety of the Intended Functionality, addressing performance limitations in complex scenarios where visual servoing systems may encounter edge cases.
Certification processes for visual servoing systems require extensive testing protocols, including scenario-based validation in controlled environments and real-world conditions. Regulatory frameworks mandate documentation of system behavior under various lighting conditions, weather scenarios, and dynamic traffic situations. These requirements directly impact the design and implementation of visual servoing algorithms, necessitating robust fail-safe mechanisms and redundant sensing capabilities.
Emerging regulations also address cybersecurity concerns, with standards like ISO/SAE 21434 requiring secure implementation of visual servoing systems to prevent malicious attacks that could compromise vehicle safety. Data privacy regulations, including GDPR compliance for visual data processing, add additional layers of regulatory complexity that must be integrated into visual servoing system architectures for sustainable transport applications.
Safety-critical visual servoing systems must comply with functional safety standards, particularly ISO 26262 for road vehicles, which mandates rigorous hazard analysis and risk assessment procedures. These standards require visual servoing implementations to achieve specific Automotive Safety Integrity Levels, typically ASIL-C or ASIL-D for critical functions such as obstacle avoidance and lane keeping. The standard emphasizes systematic verification and validation processes throughout the development lifecycle.
Regulatory bodies are establishing specific requirements for sensor fusion systems that incorporate visual servoing technologies. The Society of Automotive Engineers has developed SAE J3016 standards defining automation levels, while the International Organization for Standardization is developing ISO 21448 for Safety of the Intended Functionality, addressing performance limitations in complex scenarios where visual servoing systems may encounter edge cases.
Certification processes for visual servoing systems require extensive testing protocols, including scenario-based validation in controlled environments and real-world conditions. Regulatory frameworks mandate documentation of system behavior under various lighting conditions, weather scenarios, and dynamic traffic situations. These requirements directly impact the design and implementation of visual servoing algorithms, necessitating robust fail-safe mechanisms and redundant sensing capabilities.
Emerging regulations also address cybersecurity concerns, with standards like ISO/SAE 21434 requiring secure implementation of visual servoing systems to prevent malicious attacks that could compromise vehicle safety. Data privacy regulations, including GDPR compliance for visual data processing, add additional layers of regulatory complexity that must be integrated into visual servoing system architectures for sustainable transport applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!