

Visual Servoing vs Laser Guidance: Application Boundaries
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing and Laser Guidance Technology Background
Visual servoing and laser guidance represent two fundamental approaches to precision control and navigation systems, each with distinct technological foundations that have evolved through decades of research and development. Visual servoing emerged from the convergence of computer vision and robotics in the 1980s, leveraging camera-based feedback systems to enable real-time position and orientation control. This technology harnesses the power of image processing algorithms to extract spatial information from visual data, creating closed-loop control systems that can adapt to dynamic environments.
Laser guidance technology, conversely, originated from military and aerospace applications in the 1960s, building upon principles of coherent light propagation and precise beam steering. The technology utilizes laser beams as reference signals or direct energy sources to achieve highly accurate positioning and tracking capabilities. Early implementations focused on missile guidance systems and surveying applications, where the coherent properties of laser light provided unmatched precision over long distances.
The fundamental distinction between these technologies lies in their sensing modalities and information processing approaches. Visual servoing systems rely on passive optical sensing, capturing ambient or structured light reflected from target objects and environments. These systems excel in extracting rich semantic information from scenes, enabling complex feature recognition and multi-object tracking capabilities. The technology leverages advances in image sensors, computational power, and machine learning algorithms to achieve increasingly sophisticated visual understanding.
Laser guidance systems operate through active sensing mechanisms, either by projecting structured laser patterns or utilizing laser rangefinding principles. This approach provides exceptional accuracy in distance measurement and angular positioning, with typical precision levels reaching sub-millimeter accuracy over extended ranges. The coherent nature of laser light enables these systems to maintain performance consistency across varying environmental conditions.
Both technologies have experienced significant evolution driven by complementary technological advances. Visual servoing has benefited from exponential improvements in camera resolution, processing speed, and artificial intelligence algorithms. Modern implementations incorporate deep learning techniques for robust feature extraction and real-time object recognition, expanding application possibilities beyond traditional industrial robotics.
Laser guidance technology has similarly advanced through developments in laser diode efficiency, beam shaping optics, and precision control electronics. Contemporary systems integrate multiple laser wavelengths and advanced modulation techniques to enhance measurement accuracy and reduce environmental interference. The miniaturization of laser components has enabled deployment in increasingly compact and cost-effective platforms.
The convergence of these technologies represents an emerging trend, where hybrid systems combine visual and laser-based sensing to leverage the complementary strengths of each approach. Such integration addresses individual technology limitations while expanding overall system capabilities and reliability across diverse operational scenarios.
Laser guidance technology, conversely, originated from military and aerospace applications in the 1960s, building upon principles of coherent light propagation and precise beam steering. The technology utilizes laser beams as reference signals or direct energy sources to achieve highly accurate positioning and tracking capabilities. Early implementations focused on missile guidance systems and surveying applications, where the coherent properties of laser light provided unmatched precision over long distances.
The fundamental distinction between these technologies lies in their sensing modalities and information processing approaches. Visual servoing systems rely on passive optical sensing, capturing ambient or structured light reflected from target objects and environments. These systems excel in extracting rich semantic information from scenes, enabling complex feature recognition and multi-object tracking capabilities. The technology leverages advances in image sensors, computational power, and machine learning algorithms to achieve increasingly sophisticated visual understanding.
Laser guidance systems operate through active sensing mechanisms, either by projecting structured laser patterns or utilizing laser rangefinding principles. This approach provides exceptional accuracy in distance measurement and angular positioning, with typical precision levels reaching sub-millimeter accuracy over extended ranges. The coherent nature of laser light enables these systems to maintain performance consistency across varying environmental conditions.
Both technologies have experienced significant evolution driven by complementary technological advances. Visual servoing has benefited from exponential improvements in camera resolution, processing speed, and artificial intelligence algorithms. Modern implementations incorporate deep learning techniques for robust feature extraction and real-time object recognition, expanding application possibilities beyond traditional industrial robotics.
Laser guidance technology has similarly advanced through developments in laser diode efficiency, beam shaping optics, and precision control electronics. Contemporary systems integrate multiple laser wavelengths and advanced modulation techniques to enhance measurement accuracy and reduce environmental interference. The miniaturization of laser components has enabled deployment in increasingly compact and cost-effective platforms.
The convergence of these technologies represents an emerging trend, where hybrid systems combine visual and laser-based sensing to leverage the complementary strengths of each approach. Such integration addresses individual technology limitations while expanding overall system capabilities and reliability across diverse operational scenarios.
Market Demand Analysis for Precision Guidance Systems
The precision guidance systems market demonstrates robust growth driven by increasing automation demands across multiple industrial sectors. Manufacturing industries require enhanced accuracy for robotic assembly lines, quality control processes, and material handling operations. The automotive sector particularly drives demand through advanced driver assistance systems and autonomous vehicle development programs. Aerospace and defense applications continue expanding, requiring sophisticated guidance solutions for unmanned aerial vehicles, missile systems, and satellite positioning technologies.
Market segmentation reveals distinct application boundaries between visual servoing and laser guidance technologies. Visual servoing systems dominate applications requiring complex object recognition, adaptive path planning, and multi-dimensional tracking capabilities. These systems excel in environments where flexibility and real-time decision making are paramount, such as pick-and-place operations with varying object geometries or dynamic obstacle avoidance scenarios.
Laser guidance systems maintain strong market positions in applications demanding extreme precision and reliability under challenging environmental conditions. Industrial cutting, welding, and measurement applications favor laser-based solutions due to their superior accuracy and immunity to lighting variations. Military and aerospace sectors increasingly adopt laser guidance for long-range targeting and navigation systems where environmental robustness is critical.
Geographic market distribution shows concentrated demand in developed manufacturing regions. North American and European markets emphasize high-precision applications in automotive and aerospace industries. Asian markets, particularly China and Japan, drive volume growth through electronics manufacturing and industrial automation expansion. Emerging markets demonstrate increasing adoption rates as manufacturing capabilities advance and cost considerations favor more accessible guidance technologies.
Technology convergence trends indicate growing market demand for hybrid systems combining visual and laser guidance capabilities. Applications requiring both high precision and adaptive intelligence create opportunities for integrated solutions. Medical robotics, advanced manufacturing systems, and next-generation autonomous vehicles represent emerging market segments where combined guidance approaches offer competitive advantages over single-technology implementations.
Cost sensitivity analysis reveals market stratification based on precision requirements and operational environments. High-value applications justify premium laser guidance systems, while cost-conscious implementations favor visual servoing solutions with acceptable accuracy levels. Market growth projections indicate sustained expansion driven by industrial automation trends and increasing precision requirements across diverse application domains.
Market segmentation reveals distinct application boundaries between visual servoing and laser guidance technologies. Visual servoing systems dominate applications requiring complex object recognition, adaptive path planning, and multi-dimensional tracking capabilities. These systems excel in environments where flexibility and real-time decision making are paramount, such as pick-and-place operations with varying object geometries or dynamic obstacle avoidance scenarios.
Laser guidance systems maintain strong market positions in applications demanding extreme precision and reliability under challenging environmental conditions. Industrial cutting, welding, and measurement applications favor laser-based solutions due to their superior accuracy and immunity to lighting variations. Military and aerospace sectors increasingly adopt laser guidance for long-range targeting and navigation systems where environmental robustness is critical.
Geographic market distribution shows concentrated demand in developed manufacturing regions. North American and European markets emphasize high-precision applications in automotive and aerospace industries. Asian markets, particularly China and Japan, drive volume growth through electronics manufacturing and industrial automation expansion. Emerging markets demonstrate increasing adoption rates as manufacturing capabilities advance and cost considerations favor more accessible guidance technologies.
Technology convergence trends indicate growing market demand for hybrid systems combining visual and laser guidance capabilities. Applications requiring both high precision and adaptive intelligence create opportunities for integrated solutions. Medical robotics, advanced manufacturing systems, and next-generation autonomous vehicles represent emerging market segments where combined guidance approaches offer competitive advantages over single-technology implementations.
Cost sensitivity analysis reveals market stratification based on precision requirements and operational environments. High-value applications justify premium laser guidance systems, while cost-conscious implementations favor visual servoing solutions with acceptable accuracy levels. Market growth projections indicate sustained expansion driven by industrial automation trends and increasing precision requirements across diverse application domains.
Current State of Visual Servoing vs Laser Guidance
Visual servoing technology has reached significant maturity in industrial automation applications, with major manufacturers like KUKA, ABB, and Fanuc integrating vision-guided systems into their robotic platforms. Current visual servoing implementations primarily utilize high-resolution cameras combined with advanced image processing algorithms to achieve positioning accuracies within 0.1-0.5mm for standard industrial tasks. The technology demonstrates exceptional performance in applications requiring complex pattern recognition, multi-object tracking, and adaptive positioning in dynamic environments.
Contemporary visual servoing systems leverage sophisticated computer vision techniques including deep learning-based object detection, real-time feature extraction, and predictive tracking algorithms. These systems excel in scenarios where target objects exhibit varying shapes, colors, or orientations, making them particularly valuable for assembly operations, quality inspection, and flexible manufacturing processes. However, visual servoing faces inherent limitations in environments with poor lighting conditions, high-speed operations exceeding 2m/s, or applications requiring sub-millimeter precision.
Laser guidance systems have established dominance in high-precision applications, particularly in semiconductor manufacturing, medical device assembly, and aerospace component positioning. Current laser-based solutions achieve positioning accuracies of 0.01-0.05mm consistently, with some specialized systems reaching micrometer-level precision. Leading providers such as Coherent, IPG Photonics, and Trumpf have developed integrated laser guidance platforms that combine interferometric measurement with real-time feedback control systems.
The primary strength of laser guidance lies in its immunity to environmental factors such as ambient lighting, dust, or electromagnetic interference. Modern laser systems operate effectively across various wavelengths, with infrared and visible spectrum solutions providing reliable performance in challenging industrial environments. However, laser guidance systems typically require line-of-sight operation and struggle with highly reflective or transparent materials, limiting their applicability in certain manufacturing contexts.
Current market trends indicate a growing convergence between these technologies, with hybrid systems emerging that combine visual servoing for initial target acquisition with laser guidance for final precision positioning. This integration addresses the individual limitations of each approach while maximizing their respective advantages, representing the current frontier in precision automation technology.
Contemporary visual servoing systems leverage sophisticated computer vision techniques including deep learning-based object detection, real-time feature extraction, and predictive tracking algorithms. These systems excel in scenarios where target objects exhibit varying shapes, colors, or orientations, making them particularly valuable for assembly operations, quality inspection, and flexible manufacturing processes. However, visual servoing faces inherent limitations in environments with poor lighting conditions, high-speed operations exceeding 2m/s, or applications requiring sub-millimeter precision.
Laser guidance systems have established dominance in high-precision applications, particularly in semiconductor manufacturing, medical device assembly, and aerospace component positioning. Current laser-based solutions achieve positioning accuracies of 0.01-0.05mm consistently, with some specialized systems reaching micrometer-level precision. Leading providers such as Coherent, IPG Photonics, and Trumpf have developed integrated laser guidance platforms that combine interferometric measurement with real-time feedback control systems.
The primary strength of laser guidance lies in its immunity to environmental factors such as ambient lighting, dust, or electromagnetic interference. Modern laser systems operate effectively across various wavelengths, with infrared and visible spectrum solutions providing reliable performance in challenging industrial environments. However, laser guidance systems typically require line-of-sight operation and struggle with highly reflective or transparent materials, limiting their applicability in certain manufacturing contexts.
Current market trends indicate a growing convergence between these technologies, with hybrid systems emerging that combine visual servoing for initial target acquisition with laser guidance for final precision positioning. This integration addresses the individual limitations of each approach while maximizing their respective advantages, representing the current frontier in precision automation technology.
Current Solutions for Precision Guidance Applications
01 Visual servoing systems for robotic manipulation and positioning
Visual servoing technology enables robots to use visual feedback from cameras to guide and control their movements in real-time. This approach allows for precise positioning and manipulation tasks by continuously adjusting robot motion based on visual information. The systems typically employ image processing algorithms to extract features and calculate positioning errors, which are then used to generate control commands for achieving desired poses and trajectories.- Visual servoing systems for robotic manipulation and positioning: Visual servoing technology enables robots to use visual feedback from cameras to control their motion and positioning in real-time. This approach allows for precise manipulation tasks by continuously adjusting robot movements based on visual information. The systems typically employ image processing algorithms to track target features and calculate positioning errors, which are then used to generate control commands for robot actuators.
- Laser guidance systems for navigation and trajectory control: Laser guidance technology utilizes laser beams to provide precise directional information for navigation and trajectory control applications. These systems emit laser signals that can be detected and tracked by receivers, enabling accurate positioning and path following. The technology is particularly effective in environments where GPS signals may be unavailable or unreliable, offering high precision guidance capabilities.
- Hybrid visual-laser sensing for enhanced accuracy: Integration of visual servoing and laser guidance creates hybrid sensing systems that combine the advantages of both technologies. This approach leverages visual information for feature recognition and tracking while utilizing laser measurements for precise distance and position determination. The fusion of these sensing modalities provides improved accuracy and robustness in various application scenarios, particularly in challenging environmental conditions.
- Application boundaries in industrial automation and manufacturing: The application boundaries of visual servoing and laser guidance in industrial settings are defined by factors such as working distance, environmental conditions, and required precision levels. These technologies find extensive use in automated assembly, welding, material handling, and quality inspection processes. The selection between visual servoing and laser guidance depends on specific task requirements, including speed, accuracy, and environmental constraints.
- Limitations and complementary characteristics of both technologies: Visual servoing systems excel in feature-rich environments and complex pattern recognition but may struggle with lighting variations and occlusions. Laser guidance offers superior precision in distance measurement and works well in low-light conditions but has limited field of view and may be affected by reflective surfaces. Understanding these complementary characteristics helps determine optimal application scenarios, with some systems employing both technologies to overcome individual limitations.
02 Laser-based guidance systems for autonomous navigation
Laser guidance systems utilize laser sensors and ranging technology to provide accurate distance measurements and environmental mapping for autonomous vehicles and mobile robots. These systems can detect obstacles, measure distances to targets, and create spatial maps of the surrounding environment. The laser-based approach offers high precision and reliability in various lighting conditions, making it suitable for industrial automation and autonomous navigation applications.Expand Specific Solutions03 Hybrid visual-laser tracking and positioning systems
Integration of visual servoing and laser guidance technologies creates hybrid systems that leverage the advantages of both approaches. These combined systems use visual information for feature recognition and tracking while employing laser measurements for precise distance and depth information. The fusion of multiple sensing modalities enhances overall system robustness, accuracy, and reliability in complex operational environments where single-sensor systems may have limitations.Expand Specific Solutions04 Application boundaries in manufacturing and assembly operations
Visual servoing and laser guidance systems have specific operational limits in manufacturing environments, including constraints related to lighting conditions, surface reflectivity, and workspace geometry. These technologies are particularly effective for tasks requiring high precision such as welding, assembly, and quality inspection. However, challenges arise in scenarios involving highly reflective surfaces, transparent materials, or environments with variable illumination that can affect sensor performance and accuracy.Expand Specific Solutions05 Performance limitations in dynamic and outdoor environments
The application boundaries of visual servoing and laser guidance systems are significantly influenced by environmental factors such as weather conditions, ambient light variations, and target motion dynamics. In outdoor applications, factors like fog, rain, and direct sunlight can degrade sensor performance. Dynamic scenarios with fast-moving targets or rapidly changing environments present challenges for real-time processing and control. Understanding these limitations is crucial for determining appropriate application domains and implementing compensatory measures.Expand Specific Solutions
Key Players in Visual Servoing and Laser Guidance
The visual servoing versus laser guidance technology landscape represents a mature yet rapidly evolving sector driven by diverse application demands across automotive, medical, and industrial domains. The market demonstrates significant scale with established players like Ford Global Technologies, GM Global Technology Operations, and Samsung Electronics leading automotive applications, while medical specialists including Alcon, BIOLASE, and SCHWIND dominate precision surgical implementations. Technology maturity varies considerably across segments - automotive visual servoing systems show high commercial readiness through companies like AEye Technologies and HERE Global, whereas laser guidance applications in medical fields exhibit advanced precision capabilities via established firms like Bausch & Lomb and specialized research institutions including Beijing Institute of Technology and Zhejiang University. The competitive landscape reveals clear application boundaries emerging, with visual servoing favoring dynamic, cost-sensitive environments and laser guidance excelling in high-precision, controlled applications.
Koninklijke Philips NV
Technical Solution: Philips has extensively implemented both visual servoing and laser guidance technologies in medical imaging and surgical robotics applications. Their visual servoing systems are integrated into image-guided therapy platforms, providing real-time tracking of surgical instruments and patient anatomy during minimally invasive procedures. The company has established clear application boundaries where visual servoing excels in soft tissue tracking and surface-based navigation, while laser guidance is preferred for precise bone drilling and hard tissue applications requiring sub-millimeter accuracy. Philips' medical systems demonstrate that visual servoing is optimal for dynamic, deformable anatomy tracking where flexibility and real-time adaptation are crucial, whereas laser guidance provides superior performance for rigid structure navigation and precise ablation procedures where consistent accuracy is paramount regardless of tissue movement or optical interference.
Strengths: Extensive medical application expertise, proven clinical deployment, high precision requirements driving innovation. Weaknesses: Limited to medical domain applications, high regulatory compliance requirements, specialized market focus reducing broader applicability.
Ford Global Technologies LLC
Technical Solution: Ford has developed advanced visual servoing systems for autonomous vehicle navigation, integrating computer vision algorithms with real-time path planning. Their approach combines stereo vision cameras with LiDAR sensors to create hybrid guidance systems that leverage both visual and laser technologies. The visual servoing component handles dynamic object tracking and lane detection, while laser guidance provides precise distance measurements and obstacle avoidance in challenging weather conditions. Ford's system dynamically switches between visual and laser guidance based on environmental conditions, with visual servoing preferred in well-lit conditions with clear lane markings, and laser guidance taking precedence in fog, rain, or low-light scenarios.
Strengths: Robust hybrid approach combining both technologies, extensive real-world testing data, strong integration capabilities. Weaknesses: High computational requirements, complex sensor fusion algorithms, significant cost implications for mass production.
Core Technologies in Visual and Laser Guidance Systems
Laser guidance system
PatentInactiveUS3698816A
Innovation
- A guidance system using two synchronized rotating laser beacons to generate desired reference curves, where the orientation of one beacon is a function of the other, allowing for detection and guidance along complex paths through space, enabling both plan and elevation control for trenching equipment.




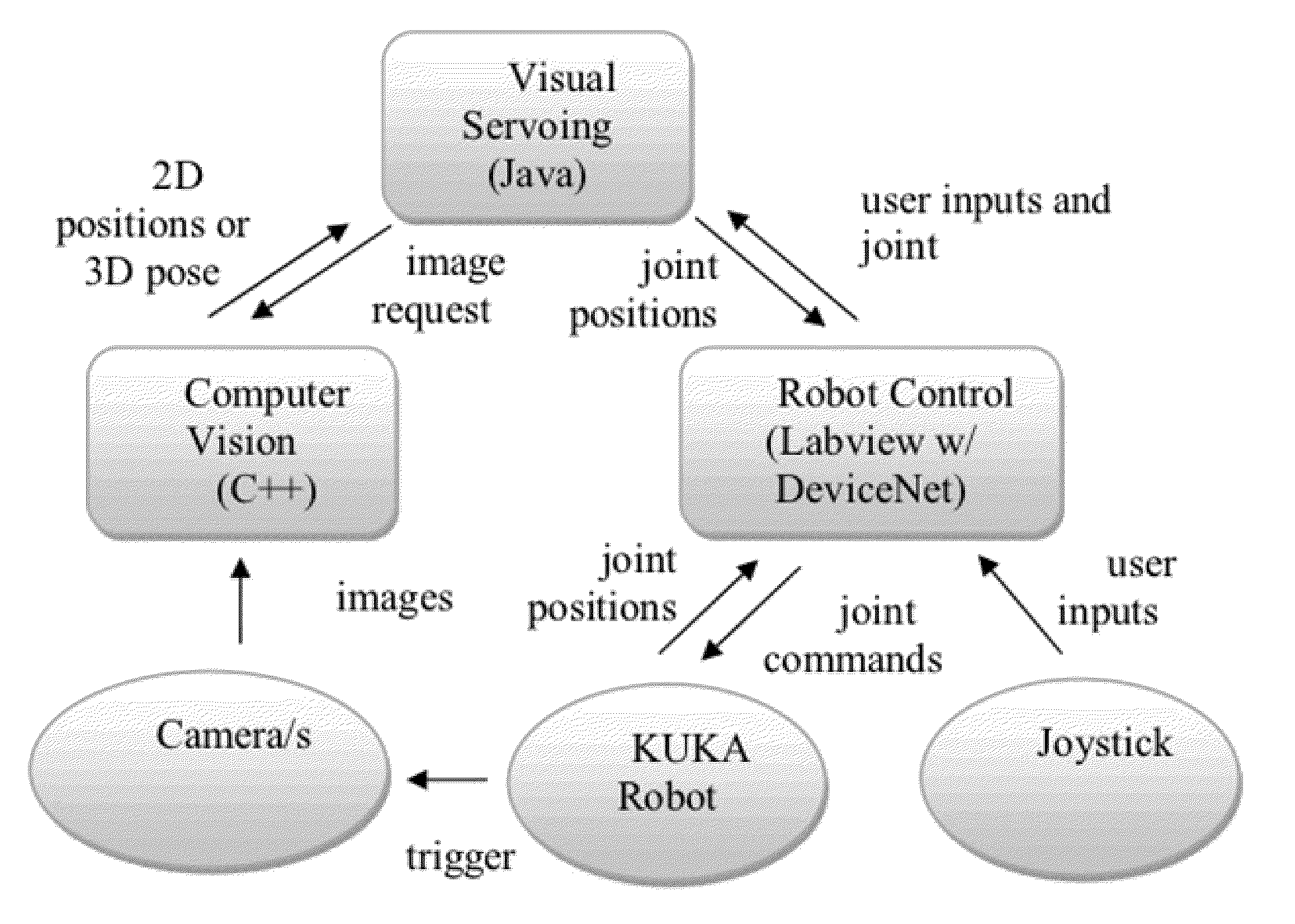
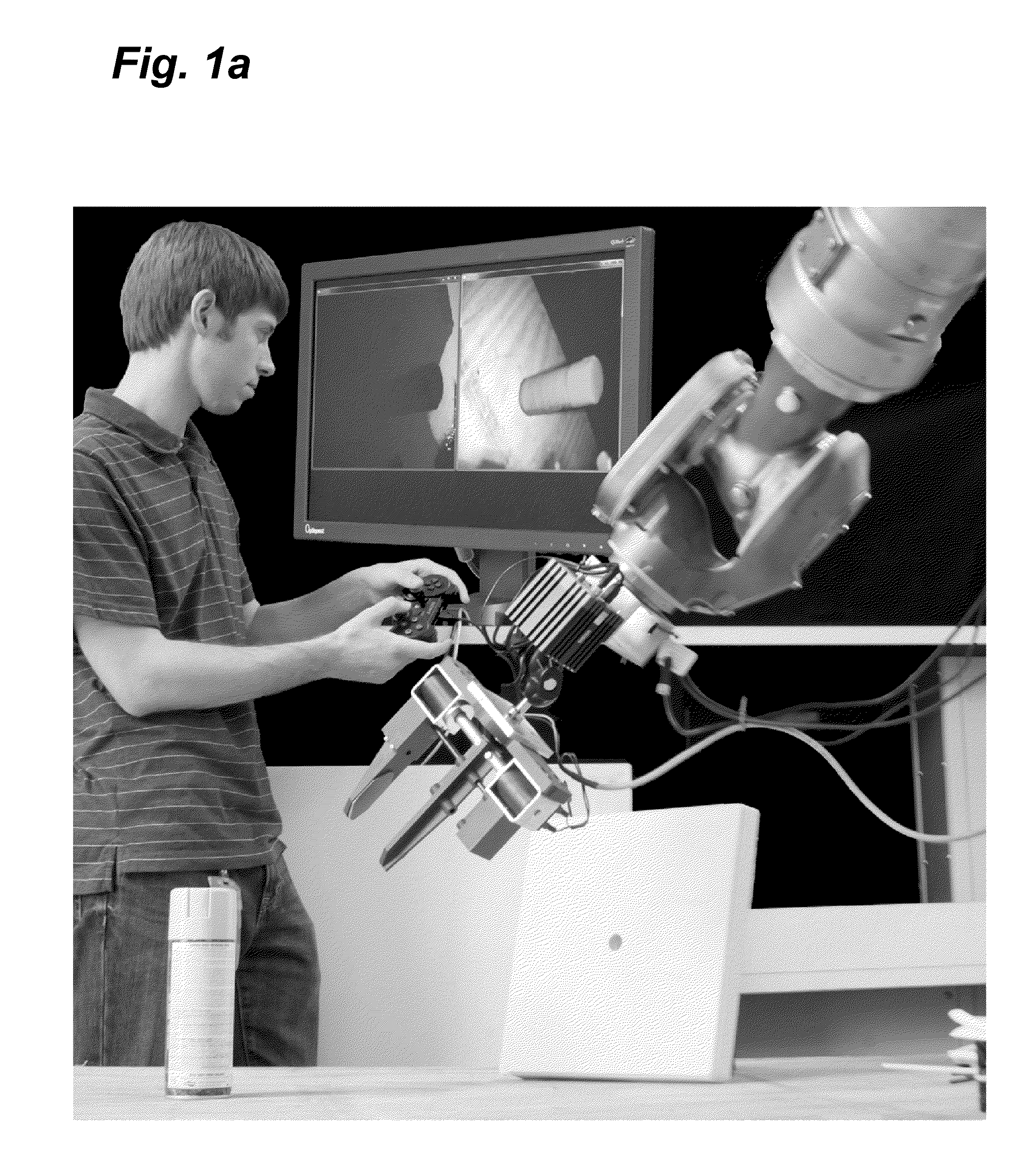
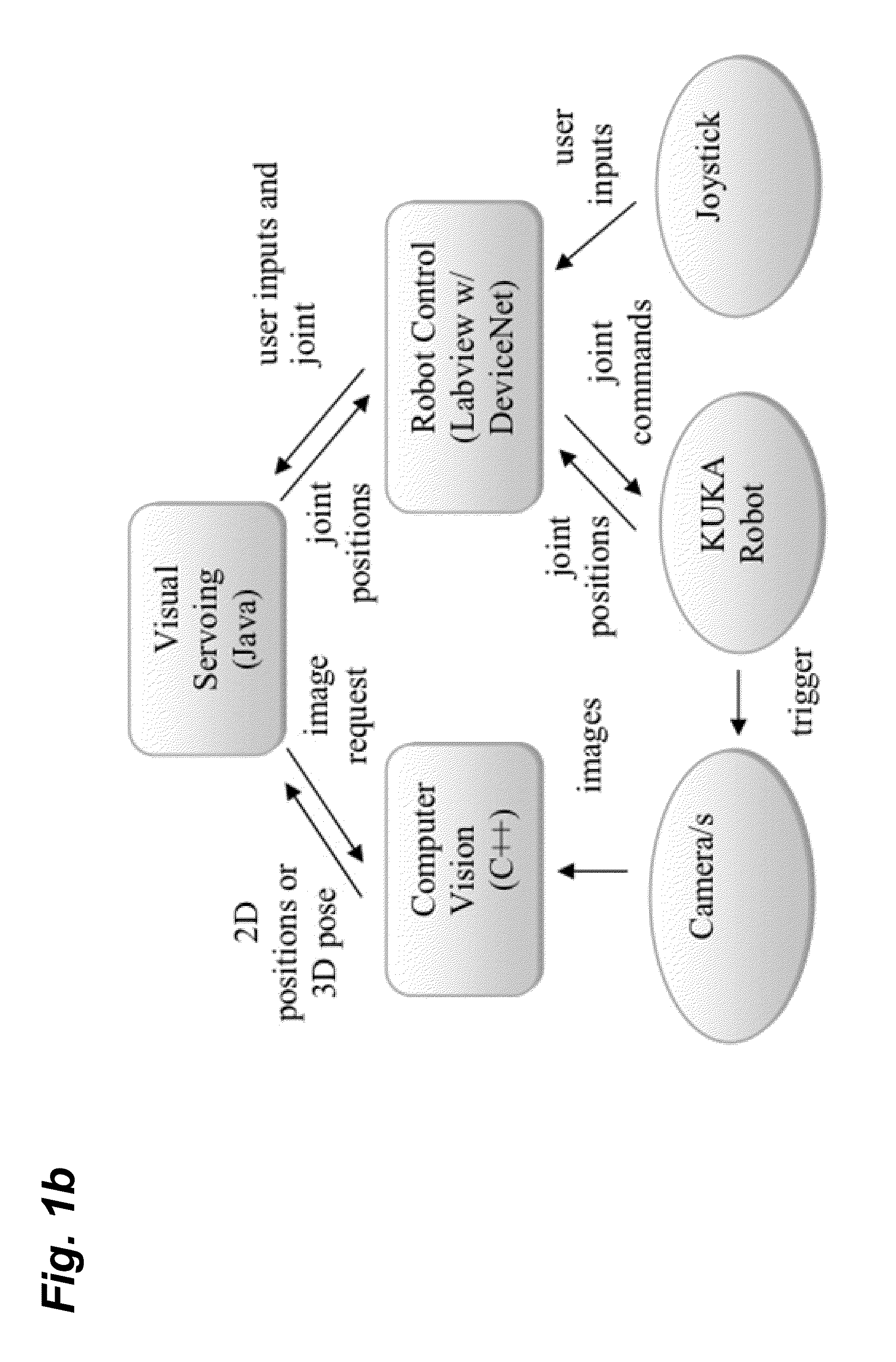
Systems and methods for operating robots using visual servoing
PatentInactiveUS20130041508A1
Innovation
- The implementation of visual servoing systems that use onboard cameras and sensors to translate commanded movements into intended robot movements in 6D space, allowing intuitive control through a joystick or similar controller without requiring precise knowledge of robot kinematics, and utilizing algorithms like Image-Based and Position-Based visual servoing to build a control map for robot control.

Safety Standards for Automated Guidance Systems
Safety standards for automated guidance systems represent a critical framework that governs the deployment and operation of both visual servoing and laser guidance technologies across industrial and commercial applications. These standards establish fundamental requirements for system reliability, fail-safe mechanisms, and operational boundaries that directly influence the selection between visual and laser-based guidance approaches.
The International Electrotechnical Commission (IEC) 61508 functional safety standard serves as the cornerstone for automated guidance systems, defining Safety Integrity Levels (SIL) that range from SIL 1 to SIL 4. Visual servoing systems typically achieve SIL 2 certification in standard industrial environments, while laser guidance systems can reach SIL 3 levels due to their inherent precision and reduced susceptibility to environmental interference. This certification difference significantly impacts application boundaries, particularly in high-risk environments such as nuclear facilities or pharmaceutical manufacturing.
ISO 13849 machinery safety standards specifically address the performance requirements for safety-related control systems. Visual servoing implementations must incorporate redundant sensor arrays and advanced image processing algorithms to meet Category 3 safety requirements, whereas laser guidance systems inherently provide higher deterministic behavior that facilitates compliance with Category 4 standards. The standard mandates specific diagnostic coverage percentages, with laser systems demonstrating superior fault detection capabilities through beam interruption monitoring and retroreflector validation protocols.
Aviation and aerospace applications operate under stringent DO-178C and DO-254 standards, which heavily favor laser guidance systems for critical flight operations due to their immunity to lighting variations and weather conditions. Visual servoing applications in these domains are typically relegated to non-critical functions or require extensive environmental qualification testing that significantly increases implementation costs.
The emerging ISO 21448 standard for Safety of the Intended Functionality (SOTIF) addresses scenarios where system failures occur despite proper functioning of individual components. This standard particularly impacts visual servoing systems, which must account for edge cases in image recognition algorithms and varying environmental conditions. Laser guidance systems demonstrate more predictable failure modes, simplifying SOTIF compliance and validation processes.
Regulatory frameworks in different geographical regions also influence technology selection. European machinery directives emphasize risk assessment methodologies that favor technologies with established safety performance records, while North American standards focus more heavily on quantitative risk analysis that can benefit innovative visual servoing approaches with comprehensive validation data.
The International Electrotechnical Commission (IEC) 61508 functional safety standard serves as the cornerstone for automated guidance systems, defining Safety Integrity Levels (SIL) that range from SIL 1 to SIL 4. Visual servoing systems typically achieve SIL 2 certification in standard industrial environments, while laser guidance systems can reach SIL 3 levels due to their inherent precision and reduced susceptibility to environmental interference. This certification difference significantly impacts application boundaries, particularly in high-risk environments such as nuclear facilities or pharmaceutical manufacturing.
ISO 13849 machinery safety standards specifically address the performance requirements for safety-related control systems. Visual servoing implementations must incorporate redundant sensor arrays and advanced image processing algorithms to meet Category 3 safety requirements, whereas laser guidance systems inherently provide higher deterministic behavior that facilitates compliance with Category 4 standards. The standard mandates specific diagnostic coverage percentages, with laser systems demonstrating superior fault detection capabilities through beam interruption monitoring and retroreflector validation protocols.
Aviation and aerospace applications operate under stringent DO-178C and DO-254 standards, which heavily favor laser guidance systems for critical flight operations due to their immunity to lighting variations and weather conditions. Visual servoing applications in these domains are typically relegated to non-critical functions or require extensive environmental qualification testing that significantly increases implementation costs.
The emerging ISO 21448 standard for Safety of the Intended Functionality (SOTIF) addresses scenarios where system failures occur despite proper functioning of individual components. This standard particularly impacts visual servoing systems, which must account for edge cases in image recognition algorithms and varying environmental conditions. Laser guidance systems demonstrate more predictable failure modes, simplifying SOTIF compliance and validation processes.
Regulatory frameworks in different geographical regions also influence technology selection. European machinery directives emphasize risk assessment methodologies that favor technologies with established safety performance records, while North American standards focus more heavily on quantitative risk analysis that can benefit innovative visual servoing approaches with comprehensive validation data.
Application Boundary Definition and Selection Criteria
The fundamental distinction between visual servoing and laser guidance systems lies in their operational principles and environmental adaptability requirements. Visual servoing relies on camera-based feedback systems that process optical information to determine positioning and movement corrections, while laser guidance utilizes coherent light beams for precise distance measurement and directional control. These technological differences create distinct application boundaries that must be carefully evaluated based on specific operational requirements.
Environmental conditions serve as primary determinants for technology selection. Visual servoing systems excel in controlled indoor environments with adequate lighting and minimal visual obstructions, making them ideal for manufacturing assembly lines, robotic pick-and-place operations, and precision machining applications. Conversely, laser guidance systems demonstrate superior performance in challenging outdoor conditions, including dust, fog, or variable lighting scenarios, positioning them as preferred solutions for construction surveying, mining operations, and military targeting systems.
Precision requirements establish another critical selection criterion. Laser guidance systems typically achieve sub-millimeter accuracy over extended distances, making them indispensable for applications demanding extreme precision such as semiconductor manufacturing, optical alignment, and scientific instrumentation. Visual servoing systems, while highly accurate within their operational range, generally provide precision levels suitable for general industrial automation and consumer robotics applications.
Cost considerations significantly influence technology adoption decisions. Visual servoing implementations often require sophisticated image processing hardware and complex algorithms, resulting in higher initial development costs but potentially lower per-unit manufacturing expenses for mass production scenarios. Laser guidance systems typically involve specialized optical components and precision mechanics, leading to higher hardware costs but simplified control algorithms and reduced computational requirements.
Real-time performance capabilities create distinct application boundaries between these technologies. Visual servoing systems require substantial computational resources for image processing and feature extraction, potentially introducing latency in high-speed applications. Laser guidance systems offer inherently faster response times due to direct distance measurements, making them preferable for dynamic tracking applications and high-velocity control scenarios where millisecond-level response times are critical for system performance and safety.
Environmental conditions serve as primary determinants for technology selection. Visual servoing systems excel in controlled indoor environments with adequate lighting and minimal visual obstructions, making them ideal for manufacturing assembly lines, robotic pick-and-place operations, and precision machining applications. Conversely, laser guidance systems demonstrate superior performance in challenging outdoor conditions, including dust, fog, or variable lighting scenarios, positioning them as preferred solutions for construction surveying, mining operations, and military targeting systems.
Precision requirements establish another critical selection criterion. Laser guidance systems typically achieve sub-millimeter accuracy over extended distances, making them indispensable for applications demanding extreme precision such as semiconductor manufacturing, optical alignment, and scientific instrumentation. Visual servoing systems, while highly accurate within their operational range, generally provide precision levels suitable for general industrial automation and consumer robotics applications.
Cost considerations significantly influence technology adoption decisions. Visual servoing implementations often require sophisticated image processing hardware and complex algorithms, resulting in higher initial development costs but potentially lower per-unit manufacturing expenses for mass production scenarios. Laser guidance systems typically involve specialized optical components and precision mechanics, leading to higher hardware costs but simplified control algorithms and reduced computational requirements.
Real-time performance capabilities create distinct application boundaries between these technologies. Visual servoing systems require substantial computational resources for image processing and feature extraction, potentially introducing latency in high-speed applications. Laser guidance systems offer inherently faster response times due to direct distance measurements, making them preferable for dynamic tracking applications and high-velocity control scenarios where millisecond-level response times are critical for system performance and safety.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!