High Pass Filter Applications in Autonomous Vehicle Navigation Systems
JUL 28, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
HPF in AV Navigation: Background and Objectives
High Pass Filters (HPFs) have emerged as a critical component in the navigation systems of autonomous vehicles (AVs), playing a pivotal role in enhancing the accuracy and reliability of sensor data processing. The evolution of HPF technology in AV applications can be traced back to the early 2000s when researchers began exploring ways to improve signal processing in automotive radar systems.
The primary objective of incorporating HPFs in AV navigation systems is to eliminate low-frequency noise and unwanted signals, thereby enhancing the quality of sensor data used for decision-making processes. This filtration is particularly crucial in urban environments where various sources of electromagnetic interference can compromise the integrity of sensor readings.
As AV technology has progressed, the demands on navigation systems have grown exponentially. Modern autonomous vehicles rely on a complex array of sensors, including LiDAR, radar, and cameras, each generating vast amounts of data that must be processed in real-time. The integration of HPFs into these systems aims to optimize the signal-to-noise ratio, ensuring that only relevant high-frequency information is retained for further processing.
The development of HPF technology for AV applications has been driven by the need for increasingly sophisticated navigation capabilities. Early implementations focused primarily on basic noise reduction in radar systems. However, as AVs have become more advanced, the role of HPFs has expanded to include applications in sensor fusion algorithms, obstacle detection, and precise localization.
One of the key technological trends in this field has been the miniaturization and integration of HPF components. This has led to the development of compact, high-performance filters that can be seamlessly incorporated into the various sensor modules of an AV. Additionally, there has been a push towards adaptive filtering techniques that can dynamically adjust their parameters based on the vehicle's operating environment.
The ongoing research in HPF technology for AV navigation systems is focused on several key areas. These include the development of more efficient filter designs that minimize power consumption and processing latency, the integration of machine learning algorithms to enhance filter performance, and the exploration of novel materials and fabrication techniques to improve filter characteristics.
As the automotive industry continues its march towards full autonomy, the importance of HPFs in navigation systems is expected to grow. Future developments in this field are likely to focus on creating more robust and adaptable filtering solutions capable of handling the increasingly complex sensor data generated by next-generation autonomous vehicles.
The primary objective of incorporating HPFs in AV navigation systems is to eliminate low-frequency noise and unwanted signals, thereby enhancing the quality of sensor data used for decision-making processes. This filtration is particularly crucial in urban environments where various sources of electromagnetic interference can compromise the integrity of sensor readings.
As AV technology has progressed, the demands on navigation systems have grown exponentially. Modern autonomous vehicles rely on a complex array of sensors, including LiDAR, radar, and cameras, each generating vast amounts of data that must be processed in real-time. The integration of HPFs into these systems aims to optimize the signal-to-noise ratio, ensuring that only relevant high-frequency information is retained for further processing.
The development of HPF technology for AV applications has been driven by the need for increasingly sophisticated navigation capabilities. Early implementations focused primarily on basic noise reduction in radar systems. However, as AVs have become more advanced, the role of HPFs has expanded to include applications in sensor fusion algorithms, obstacle detection, and precise localization.
One of the key technological trends in this field has been the miniaturization and integration of HPF components. This has led to the development of compact, high-performance filters that can be seamlessly incorporated into the various sensor modules of an AV. Additionally, there has been a push towards adaptive filtering techniques that can dynamically adjust their parameters based on the vehicle's operating environment.
The ongoing research in HPF technology for AV navigation systems is focused on several key areas. These include the development of more efficient filter designs that minimize power consumption and processing latency, the integration of machine learning algorithms to enhance filter performance, and the exploration of novel materials and fabrication techniques to improve filter characteristics.
As the automotive industry continues its march towards full autonomy, the importance of HPFs in navigation systems is expected to grow. Future developments in this field are likely to focus on creating more robust and adaptable filtering solutions capable of handling the increasingly complex sensor data generated by next-generation autonomous vehicles.
Market Demand for Advanced AV Navigation Systems
The market demand for advanced autonomous vehicle (AV) navigation systems has been experiencing significant growth, driven by the increasing focus on vehicle safety, efficiency, and the overall push towards autonomous driving technologies. High pass filter applications play a crucial role in enhancing the performance and reliability of these navigation systems, contributing to their rising demand in the automotive industry.
One of the primary factors fueling this demand is the growing emphasis on vehicle safety. Advanced navigation systems equipped with high pass filters can effectively reduce noise and interference in sensor data, leading to more accurate and reliable navigation information. This improved accuracy directly translates to enhanced safety features, such as collision avoidance, lane departure warnings, and adaptive cruise control, which are highly sought after by consumers and regulatory bodies alike.
The automotive industry's shift towards higher levels of autonomy is another key driver for advanced AV navigation systems. As vehicles progress from driver assistance to full autonomy, the complexity and sophistication of navigation systems increase exponentially. High pass filters are essential in processing the vast amounts of data generated by various sensors, including LiDAR, radar, and cameras, ensuring that only relevant information is used for decision-making processes.
Furthermore, the integration of advanced navigation systems with other emerging technologies, such as 5G connectivity and artificial intelligence, is creating new opportunities and applications. These synergies are expanding the capabilities of AV navigation systems, making them more attractive to both automotive manufacturers and end-users.
The market demand is also being influenced by stringent government regulations and initiatives promoting vehicle safety and reducing road accidents. Many countries are implementing policies that mandate the inclusion of advanced driver assistance systems (ADAS) in new vehicles, indirectly boosting the demand for sophisticated navigation systems incorporating high pass filter technologies.
From a consumer perspective, there is a growing awareness and appreciation for the benefits of advanced navigation systems. Features such as real-time traffic updates, precise location tracking, and seamless integration with smartphones are becoming standard expectations among car buyers. This consumer demand is pushing automotive manufacturers to invest more in developing and implementing cutting-edge navigation technologies.
In conclusion, the market demand for advanced AV navigation systems with high pass filter applications is robust and multifaceted. It is driven by a combination of safety concerns, technological advancements, regulatory pressures, and consumer preferences. As the automotive industry continues its journey towards full autonomy, the importance and demand for these sophisticated navigation systems are expected to grow even further in the coming years.
One of the primary factors fueling this demand is the growing emphasis on vehicle safety. Advanced navigation systems equipped with high pass filters can effectively reduce noise and interference in sensor data, leading to more accurate and reliable navigation information. This improved accuracy directly translates to enhanced safety features, such as collision avoidance, lane departure warnings, and adaptive cruise control, which are highly sought after by consumers and regulatory bodies alike.
The automotive industry's shift towards higher levels of autonomy is another key driver for advanced AV navigation systems. As vehicles progress from driver assistance to full autonomy, the complexity and sophistication of navigation systems increase exponentially. High pass filters are essential in processing the vast amounts of data generated by various sensors, including LiDAR, radar, and cameras, ensuring that only relevant information is used for decision-making processes.
Furthermore, the integration of advanced navigation systems with other emerging technologies, such as 5G connectivity and artificial intelligence, is creating new opportunities and applications. These synergies are expanding the capabilities of AV navigation systems, making them more attractive to both automotive manufacturers and end-users.
The market demand is also being influenced by stringent government regulations and initiatives promoting vehicle safety and reducing road accidents. Many countries are implementing policies that mandate the inclusion of advanced driver assistance systems (ADAS) in new vehicles, indirectly boosting the demand for sophisticated navigation systems incorporating high pass filter technologies.
From a consumer perspective, there is a growing awareness and appreciation for the benefits of advanced navigation systems. Features such as real-time traffic updates, precise location tracking, and seamless integration with smartphones are becoming standard expectations among car buyers. This consumer demand is pushing automotive manufacturers to invest more in developing and implementing cutting-edge navigation technologies.
In conclusion, the market demand for advanced AV navigation systems with high pass filter applications is robust and multifaceted. It is driven by a combination of safety concerns, technological advancements, regulatory pressures, and consumer preferences. As the automotive industry continues its journey towards full autonomy, the importance and demand for these sophisticated navigation systems are expected to grow even further in the coming years.
Current HPF Technology in AV Navigation
High-pass filters (HPFs) play a crucial role in autonomous vehicle (AV) navigation systems, particularly in sensor data processing and noise reduction. Current HPF technology in AV navigation focuses on enhancing the accuracy and reliability of various sensors, including LiDAR, radar, and cameras.
In LiDAR systems, HPFs are employed to remove low-frequency noise caused by environmental factors such as dust, fog, or rain. These filters help isolate high-frequency signals that represent actual objects and obstacles, improving the overall detection accuracy. Advanced HPF algorithms adaptively adjust filter parameters based on real-time environmental conditions, ensuring optimal performance across diverse scenarios.
Radar systems in AVs utilize HPFs to eliminate ground clutter and static objects, allowing for better detection of moving targets. Modern radar HPFs incorporate machine learning techniques to dynamically adjust filter thresholds, enhancing the system's ability to distinguish between relevant and irrelevant signals in complex urban environments.
Camera-based navigation systems benefit from HPFs in image processing pipelines. These filters are applied to remove low-frequency components that often represent background illumination or large-scale intensity variations. By emphasizing high-frequency details, HPFs enhance edge detection and feature extraction, crucial for object recognition and lane detection tasks.
Inertial Measurement Units (IMUs) in AV navigation systems employ HPFs to mitigate drift errors and improve position estimation accuracy. Advanced HPF designs incorporate sensor fusion techniques, combining data from multiple sources to achieve more robust filtering and noise reduction.
Recent developments in HPF technology for AV navigation include the integration of artificial intelligence and deep learning models. These AI-enhanced filters can learn complex noise patterns and adapt their parameters in real-time, significantly improving filtering performance across diverse driving conditions.
Hardware implementations of HPFs in AV systems have also seen advancements. Field-Programmable Gate Arrays (FPGAs) and Application-Specific Integrated Circuits (ASICs) are now commonly used to implement high-performance, low-latency HPFs, enabling real-time processing of sensor data streams.
Multi-stage HPF architectures are gaining popularity in AV navigation systems. These designs cascade multiple filter stages, each optimized for specific frequency ranges or noise characteristics. This approach allows for more precise control over the filtering process and better overall system performance.
Adaptive HPF algorithms that dynamically adjust their cutoff frequencies based on vehicle speed and environmental conditions are becoming increasingly common. These smart filters ensure optimal noise reduction while preserving critical high-frequency information across various driving scenarios.
In LiDAR systems, HPFs are employed to remove low-frequency noise caused by environmental factors such as dust, fog, or rain. These filters help isolate high-frequency signals that represent actual objects and obstacles, improving the overall detection accuracy. Advanced HPF algorithms adaptively adjust filter parameters based on real-time environmental conditions, ensuring optimal performance across diverse scenarios.
Radar systems in AVs utilize HPFs to eliminate ground clutter and static objects, allowing for better detection of moving targets. Modern radar HPFs incorporate machine learning techniques to dynamically adjust filter thresholds, enhancing the system's ability to distinguish between relevant and irrelevant signals in complex urban environments.
Camera-based navigation systems benefit from HPFs in image processing pipelines. These filters are applied to remove low-frequency components that often represent background illumination or large-scale intensity variations. By emphasizing high-frequency details, HPFs enhance edge detection and feature extraction, crucial for object recognition and lane detection tasks.
Inertial Measurement Units (IMUs) in AV navigation systems employ HPFs to mitigate drift errors and improve position estimation accuracy. Advanced HPF designs incorporate sensor fusion techniques, combining data from multiple sources to achieve more robust filtering and noise reduction.
Recent developments in HPF technology for AV navigation include the integration of artificial intelligence and deep learning models. These AI-enhanced filters can learn complex noise patterns and adapt their parameters in real-time, significantly improving filtering performance across diverse driving conditions.
Hardware implementations of HPFs in AV systems have also seen advancements. Field-Programmable Gate Arrays (FPGAs) and Application-Specific Integrated Circuits (ASICs) are now commonly used to implement high-performance, low-latency HPFs, enabling real-time processing of sensor data streams.
Multi-stage HPF architectures are gaining popularity in AV navigation systems. These designs cascade multiple filter stages, each optimized for specific frequency ranges or noise characteristics. This approach allows for more precise control over the filtering process and better overall system performance.
Adaptive HPF algorithms that dynamically adjust their cutoff frequencies based on vehicle speed and environmental conditions are becoming increasingly common. These smart filters ensure optimal noise reduction while preserving critical high-frequency information across various driving scenarios.
Existing HPF Solutions for AV Navigation
01 Circuit design for high pass filters
High pass filters are designed using various circuit configurations to attenuate low-frequency signals while allowing high-frequency signals to pass through. These designs often involve the use of capacitors and resistors in specific arrangements to achieve the desired frequency response. Advanced designs may incorporate active components like operational amplifiers to enhance performance and provide additional functionality.- Circuit design for high pass filters: High pass filters can be designed using various circuit configurations, including RC circuits, active filters with operational amplifiers, and digital implementations. These designs aim to attenuate low-frequency signals while allowing high-frequency signals to pass through. The choice of components and topology affects the filter's cutoff frequency, roll-off rate, and overall performance.
- Applications in signal processing and communications: High pass filters are widely used in signal processing and communication systems. They are employed to remove DC offsets, reduce low-frequency noise, and separate high-frequency components from complex signals. Applications include audio processing, video systems, wireless communications, and data transmission, where they help improve signal quality and reduce interference.
- Integration with other filter types: High pass filters are often combined with other filter types to create more complex filtering solutions. This includes integration with low pass filters to form band-pass or band-stop filters, as well as incorporation into adaptive filtering systems. Such combinations allow for more precise control over the frequency response and can be tailored to specific application requirements.
- Digital implementation and software-defined filters: Advancements in digital signal processing have led to the development of software-defined high pass filters. These filters use digital algorithms to process signals, offering greater flexibility and programmability compared to analog counterparts. Digital implementations allow for easy adjustment of filter parameters, real-time adaptation, and integration with other digital systems.
- Miniaturization and integration in microelectronics: High pass filters are being miniaturized and integrated into microelectronic devices and systems-on-chip (SoC). This trend involves developing compact filter designs, using advanced semiconductor processes, and integrating filters with other circuit elements. Miniaturization efforts aim to reduce power consumption, improve performance, and enable the use of high pass filters in portable and space-constrained applications.
02 Digital implementation of high pass filters
Digital high pass filters are implemented using digital signal processing techniques. These filters can be realized through software algorithms or dedicated hardware components such as digital signal processors (DSPs) or field-programmable gate arrays (FPGAs). Digital implementations offer advantages in terms of flexibility, precision, and ease of modification compared to their analog counterparts.Expand Specific Solutions03 Application of high pass filters in image and video processing
High pass filters play a crucial role in image and video processing applications. They are used for edge detection, noise reduction, and image enhancement by emphasizing high-frequency components of the visual data. These filters can be applied in various stages of the image processing pipeline, including pre-processing, feature extraction, and post-processing.Expand Specific Solutions04 High pass filters in communication systems
High pass filters are essential components in communication systems for signal conditioning and noise reduction. They are used to remove low-frequency interference, DC offsets, and unwanted baseband signals in receivers and transmitters. These filters help improve the overall signal quality and system performance in various communication applications, including wireless and wired systems.Expand Specific Solutions05 Adaptive and tunable high pass filters
Adaptive and tunable high pass filters offer dynamic adjustment of filter characteristics based on input signals or system requirements. These filters can automatically modify their cutoff frequency, order, or other parameters to optimize performance in changing environments. Implementation of such filters often involves feedback mechanisms, control algorithms, or reconfigurable hardware to achieve adaptability.Expand Specific Solutions
Key Players in AV Navigation and HPF Technology
The high pass filter applications in autonomous vehicle navigation systems market is in a growth phase, driven by increasing adoption of advanced driver assistance systems (ADAS) and autonomous driving technologies. The market size is expanding rapidly, with projections indicating significant growth over the next decade. Technologically, the field is advancing quickly but still maturing, with key players like Robert Bosch, Qualcomm, and NVIDIA leading innovation. These companies are developing sophisticated filtering algorithms and sensor fusion techniques to improve navigation accuracy and reliability in various environmental conditions. Emerging players like AutoCore and TuSimple are also contributing to technological advancements, particularly in specialized areas like autonomous trucking.
GM Global Technology Operations LLC
Technical Solution: GM's approach to high-pass filter applications in autonomous vehicle navigation systems focuses on enhancing sensor fusion and noise reduction. They employ advanced digital signal processing techniques to implement adaptive high-pass filters that dynamically adjust cutoff frequencies based on driving conditions[1]. This allows for more effective removal of low-frequency noise and DC offsets from various sensor inputs, including LIDAR, radar, and camera data. GM's system integrates these filters into a comprehensive sensor fusion algorithm, which combines data from multiple sources to create a more accurate and robust representation of the vehicle's environment[3]. The high-pass filters are particularly crucial in urban environments, where they help distinguish between stationary objects and moving obstacles by effectively filtering out slow-changing background signals[5].
Strengths: Adaptive filtering improves performance across diverse driving conditions. Comprehensive sensor fusion enhances overall system accuracy. Weaknesses: May require significant computational resources, potentially increasing system cost and complexity.
QUALCOMM, Inc.
Technical Solution: Qualcomm's approach to high-pass filter applications in autonomous vehicle navigation systems is centered around their Snapdragon Ride Platform. They have developed a specialized signal processing unit that implements efficient high-pass filtering algorithms optimized for automotive-grade sensors[1]. Qualcomm's solution utilizes a combination of hardware-accelerated digital signal processing and software-defined filters to achieve low-latency, high-precision filtering of sensor data[3]. Their high-pass filters are particularly effective in improving the performance of inertial measurement units (IMUs) and GNSS receivers, crucial for accurate vehicle localization and navigation[5]. Qualcomm's system also incorporates adaptive filter tuning based on vehicle dynamics and environmental conditions, ensuring optimal performance across various driving scenarios[7].
Strengths: Low-latency processing suitable for real-time navigation. Efficient implementation optimized for mobile platforms. Weaknesses: May have limitations in handling extremely complex, multi-sensor fusion scenarios compared to more specialized solutions.
Core HPF Innovations for AV Navigation
Antenna amplifier for a vehicle with means for ESD protection in the input thereof
PatentInactiveEP1794838A1
Innovation
- A high-pass filter is used to filter out the spectral damaging portions of high-frequency signals, specifically ESD pulses, while allowing useful radio-frequency signals to pass through, with a cut-off frequency designed to suppress interference without degrading the useful signal, and implemented using discrete components and printed strip lines for efficient and cost-effective ESD protection.
Means and method for measuring the course of a land vehicle
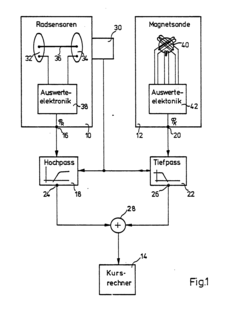
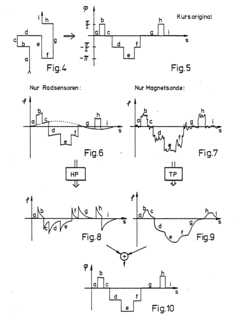
PatentInactiveEP0289803A2
Innovation
- A method and device that process driving data and geomagnetic field data using differentiation and integration, with a high-pass filter for driving data and a low-pass filter for geomagnetic field data, to suppress errors and enhance accuracy, reducing computing time and memory requirements.

Safety and Reliability Considerations
Safety and reliability are paramount considerations in the application of High Pass Filters (HPFs) within autonomous vehicle navigation systems. These filters play a crucial role in enhancing the accuracy and robustness of sensor data, which directly impacts the vehicle's ability to navigate safely and make reliable decisions in real-time.
One of the primary safety considerations is the filter's ability to effectively remove low-frequency noise and DC offset from sensor signals. This is particularly important for inertial measurement units (IMUs) and accelerometers, where drift and bias can accumulate over time, leading to potentially dangerous navigation errors. By implementing well-designed HPFs, autonomous vehicles can maintain more accurate positioning and orientation information, reducing the risk of collisions or unintended deviations from the intended path.
Reliability in HPF applications is closely tied to the filter's performance consistency across various environmental conditions. Autonomous vehicles operate in diverse settings, from urban landscapes to rural terrains, and must contend with varying temperatures, vibrations, and electromagnetic interference. The HPFs employed must demonstrate robust performance across these conditions to ensure consistent and dependable sensor data processing.
Another critical aspect of safety and reliability is the real-time processing capability of HPFs. Autonomous navigation systems require instantaneous decision-making based on current sensor inputs. The computational efficiency of HPFs must be optimized to minimize latency while maintaining high-quality signal processing. Any significant delay in filtering could result in outdated information being used for navigation decisions, potentially compromising vehicle safety.
Fault tolerance and redundancy are essential considerations in HPF implementation. Navigation systems often employ multiple sensors and data fusion techniques to cross-validate information. The HPF design should account for potential sensor failures or data inconsistencies, incorporating mechanisms to detect anomalies and switch to backup systems when necessary. This redundancy ensures that the navigation system remains operational even if individual components experience issues.
Calibration and adaptive filtering techniques further enhance the safety and reliability of HPF applications. As sensor characteristics may drift over time or vary with environmental factors, the ability to dynamically adjust filter parameters is crucial. Adaptive HPFs can optimize their performance based on real-time conditions, maintaining optimal signal quality across diverse scenarios and throughout the vehicle's operational lifetime.
Lastly, the integration of HPFs with other signal processing and decision-making algorithms in the autonomous navigation stack must be carefully considered. The filtered outputs must seamlessly feed into subsequent processing stages, such as sensor fusion, object detection, and path planning. Ensuring compatibility and smooth data flow between these components is vital for maintaining overall system reliability and safety performance.
One of the primary safety considerations is the filter's ability to effectively remove low-frequency noise and DC offset from sensor signals. This is particularly important for inertial measurement units (IMUs) and accelerometers, where drift and bias can accumulate over time, leading to potentially dangerous navigation errors. By implementing well-designed HPFs, autonomous vehicles can maintain more accurate positioning and orientation information, reducing the risk of collisions or unintended deviations from the intended path.
Reliability in HPF applications is closely tied to the filter's performance consistency across various environmental conditions. Autonomous vehicles operate in diverse settings, from urban landscapes to rural terrains, and must contend with varying temperatures, vibrations, and electromagnetic interference. The HPFs employed must demonstrate robust performance across these conditions to ensure consistent and dependable sensor data processing.
Another critical aspect of safety and reliability is the real-time processing capability of HPFs. Autonomous navigation systems require instantaneous decision-making based on current sensor inputs. The computational efficiency of HPFs must be optimized to minimize latency while maintaining high-quality signal processing. Any significant delay in filtering could result in outdated information being used for navigation decisions, potentially compromising vehicle safety.
Fault tolerance and redundancy are essential considerations in HPF implementation. Navigation systems often employ multiple sensors and data fusion techniques to cross-validate information. The HPF design should account for potential sensor failures or data inconsistencies, incorporating mechanisms to detect anomalies and switch to backup systems when necessary. This redundancy ensures that the navigation system remains operational even if individual components experience issues.
Calibration and adaptive filtering techniques further enhance the safety and reliability of HPF applications. As sensor characteristics may drift over time or vary with environmental factors, the ability to dynamically adjust filter parameters is crucial. Adaptive HPFs can optimize their performance based on real-time conditions, maintaining optimal signal quality across diverse scenarios and throughout the vehicle's operational lifetime.
Lastly, the integration of HPFs with other signal processing and decision-making algorithms in the autonomous navigation stack must be carefully considered. The filtered outputs must seamlessly feed into subsequent processing stages, such as sensor fusion, object detection, and path planning. Ensuring compatibility and smooth data flow between these components is vital for maintaining overall system reliability and safety performance.
Regulatory Framework for AV Navigation Systems
The regulatory framework for autonomous vehicle (AV) navigation systems is a critical aspect of ensuring the safe and responsible deployment of this technology. As AVs become more prevalent on public roads, governments and regulatory bodies worldwide are developing comprehensive guidelines and standards to address the unique challenges posed by these systems.
At the federal level in the United States, the National Highway Traffic Safety Administration (NHTSA) has taken a leading role in shaping AV regulations. The agency has released several iterations of guidance documents, including the "Automated Driving Systems 2.0: A Vision for Safety" and subsequent updates. These guidelines provide a framework for AV testing and deployment, emphasizing safety, cybersecurity, and data privacy.
In Europe, the United Nations Economic Commission for Europe (UNECE) has been instrumental in developing international regulations for AVs. The UNECE's World Forum for Harmonization of Vehicle Regulations (WP.29) has adopted several regulations addressing automated lane-keeping systems and cybersecurity requirements for AVs.
Many countries have also implemented their own regulatory frameworks. For instance, Germany has passed legislation allowing for the commercial operation of Level 4 autonomous vehicles on public roads, subject to specific safety and operational requirements. Similarly, Japan has introduced a legal framework for the deployment of Level 3 automated vehicles.
Regulatory bodies are particularly focused on the safety aspects of AV navigation systems. This includes requirements for redundancy in critical components, fail-safe mechanisms, and the ability to handle edge cases and unexpected situations. High-pass filter applications in AV navigation systems are subject to these safety regulations, as they play a crucial role in signal processing and sensor data interpretation.
Data privacy and cybersecurity are other key areas of regulatory focus. As AV navigation systems collect and process vast amounts of data, including potentially sensitive information about vehicle occupants and their movements, regulators are implementing strict data protection measures. These often align with broader data privacy regulations such as the European Union's General Data Protection Regulation (GDPR).
The regulatory landscape for AV navigation systems is dynamic and evolving. As technology advances and real-world testing provides more insights, regulatory frameworks are continuously updated to address new challenges and opportunities. This adaptive approach aims to strike a balance between fostering innovation and ensuring public safety.
At the federal level in the United States, the National Highway Traffic Safety Administration (NHTSA) has taken a leading role in shaping AV regulations. The agency has released several iterations of guidance documents, including the "Automated Driving Systems 2.0: A Vision for Safety" and subsequent updates. These guidelines provide a framework for AV testing and deployment, emphasizing safety, cybersecurity, and data privacy.
In Europe, the United Nations Economic Commission for Europe (UNECE) has been instrumental in developing international regulations for AVs. The UNECE's World Forum for Harmonization of Vehicle Regulations (WP.29) has adopted several regulations addressing automated lane-keeping systems and cybersecurity requirements for AVs.
Many countries have also implemented their own regulatory frameworks. For instance, Germany has passed legislation allowing for the commercial operation of Level 4 autonomous vehicles on public roads, subject to specific safety and operational requirements. Similarly, Japan has introduced a legal framework for the deployment of Level 3 automated vehicles.
Regulatory bodies are particularly focused on the safety aspects of AV navigation systems. This includes requirements for redundancy in critical components, fail-safe mechanisms, and the ability to handle edge cases and unexpected situations. High-pass filter applications in AV navigation systems are subject to these safety regulations, as they play a crucial role in signal processing and sensor data interpretation.
Data privacy and cybersecurity are other key areas of regulatory focus. As AV navigation systems collect and process vast amounts of data, including potentially sensitive information about vehicle occupants and their movements, regulators are implementing strict data protection measures. These often align with broader data privacy regulations such as the European Union's General Data Protection Regulation (GDPR).
The regulatory landscape for AV navigation systems is dynamic and evolving. As technology advances and real-world testing provides more insights, regulatory frameworks are continuously updated to address new challenges and opportunities. This adaptive approach aims to strike a balance between fostering innovation and ensuring public safety.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!