How to Calculate Forces in Multi Point Constraint
MAR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Multi Point Constraint Force Calculation Background and Objectives
Multi-point constraint (MPC) force calculation represents a fundamental computational challenge in structural mechanics and finite element analysis, where multiple degrees of freedom are interconnected through mathematical relationships. This technology has evolved from basic linear constraint equations in the 1960s to sophisticated nonlinear multi-physics coupling systems used in modern engineering simulations. The historical development traces back to early structural analysis methods, progressing through matrix structural analysis, and culminating in today's advanced computational mechanics frameworks.
The evolution of MPC force calculation has been driven by increasing demands for accurate simulation of complex mechanical systems. Early implementations focused on simple beam and truss structures with basic connectivity constraints. The advent of computer-aided engineering in the 1980s enabled more sophisticated constraint handling, incorporating rotational degrees of freedom and non-coincident node connections. Modern developments have expanded to include contact mechanics, fluid-structure interactions, and multi-scale modeling applications.
Current technological trends emphasize real-time constraint force computation for interactive design environments and virtual reality applications. The integration of machine learning algorithms with traditional constraint solving methods represents an emerging paradigm shift. Additionally, the development of GPU-accelerated constraint solvers has significantly improved computational efficiency for large-scale problems involving millions of constraint equations.
The primary technical objectives center on achieving computational accuracy while maintaining numerical stability across diverse loading conditions. Key goals include developing robust algorithms that handle ill-conditioned constraint matrices, implementing efficient sparse matrix solution techniques, and ensuring convergence in nonlinear constraint scenarios. Performance optimization remains critical, particularly for real-time applications requiring sub-millisecond response times.
Strategic objectives encompass establishing standardized constraint formulation methodologies that can be universally applied across different engineering disciplines. The technology aims to bridge the gap between theoretical constraint mechanics and practical implementation in commercial software packages. Long-term goals include developing adaptive constraint algorithms that automatically adjust solution strategies based on problem characteristics, ultimately enabling more intuitive and reliable engineering analysis tools for complex multi-body systems and advanced manufacturing processes.
The evolution of MPC force calculation has been driven by increasing demands for accurate simulation of complex mechanical systems. Early implementations focused on simple beam and truss structures with basic connectivity constraints. The advent of computer-aided engineering in the 1980s enabled more sophisticated constraint handling, incorporating rotational degrees of freedom and non-coincident node connections. Modern developments have expanded to include contact mechanics, fluid-structure interactions, and multi-scale modeling applications.
Current technological trends emphasize real-time constraint force computation for interactive design environments and virtual reality applications. The integration of machine learning algorithms with traditional constraint solving methods represents an emerging paradigm shift. Additionally, the development of GPU-accelerated constraint solvers has significantly improved computational efficiency for large-scale problems involving millions of constraint equations.
The primary technical objectives center on achieving computational accuracy while maintaining numerical stability across diverse loading conditions. Key goals include developing robust algorithms that handle ill-conditioned constraint matrices, implementing efficient sparse matrix solution techniques, and ensuring convergence in nonlinear constraint scenarios. Performance optimization remains critical, particularly for real-time applications requiring sub-millisecond response times.
Strategic objectives encompass establishing standardized constraint formulation methodologies that can be universally applied across different engineering disciplines. The technology aims to bridge the gap between theoretical constraint mechanics and practical implementation in commercial software packages. Long-term goals include developing adaptive constraint algorithms that automatically adjust solution strategies based on problem characteristics, ultimately enabling more intuitive and reliable engineering analysis tools for complex multi-body systems and advanced manufacturing processes.
Market Demand for Advanced MPC Force Analysis Solutions
The global market for advanced Multi-Point Constraint (MPC) force analysis solutions is experiencing significant growth driven by increasing complexity in engineering systems across multiple industries. Automotive manufacturers are demanding sophisticated MPC force calculation capabilities to optimize vehicle dynamics, crash safety systems, and suspension designs. The aerospace sector requires precise force analysis for aircraft structural components, landing gear systems, and control surface mechanisms where multiple constraints interact simultaneously.
Industrial automation and robotics represent another major demand driver, as manufacturers seek to improve the precision and reliability of multi-axis robotic systems. These applications require real-time force calculation capabilities to ensure optimal performance while maintaining safety constraints. The growing adoption of collaborative robots in manufacturing environments has further intensified the need for advanced MPC force analysis tools.
The renewable energy sector, particularly wind turbine design and offshore platform engineering, has emerged as a substantial market segment. These applications involve complex multi-point constraint scenarios where accurate force distribution calculations are critical for structural integrity and operational efficiency. Solar panel mounting systems and tracking mechanisms also contribute to this demand as installations become larger and more sophisticated.
Medical device manufacturing presents a specialized but high-value market segment, where MPC force analysis is essential for surgical robotics, prosthetic devices, and rehabilitation equipment. The precision requirements in these applications often exceed those in traditional industrial sectors, driving demand for more advanced analytical capabilities.
Construction and civil engineering markets are increasingly adopting MPC force analysis solutions for complex structural designs, particularly in high-rise buildings, bridges, and infrastructure projects where multiple load paths and constraint conditions must be simultaneously evaluated. The integration of Building Information Modeling with advanced force analysis capabilities has created new market opportunities.
The market demand is further amplified by regulatory requirements across industries that mandate comprehensive force analysis documentation for safety-critical applications. This regulatory pressure, combined with the increasing complexity of modern engineering systems, continues to drive sustained growth in the MPC force analysis solutions market.
Industrial automation and robotics represent another major demand driver, as manufacturers seek to improve the precision and reliability of multi-axis robotic systems. These applications require real-time force calculation capabilities to ensure optimal performance while maintaining safety constraints. The growing adoption of collaborative robots in manufacturing environments has further intensified the need for advanced MPC force analysis tools.
The renewable energy sector, particularly wind turbine design and offshore platform engineering, has emerged as a substantial market segment. These applications involve complex multi-point constraint scenarios where accurate force distribution calculations are critical for structural integrity and operational efficiency. Solar panel mounting systems and tracking mechanisms also contribute to this demand as installations become larger and more sophisticated.
Medical device manufacturing presents a specialized but high-value market segment, where MPC force analysis is essential for surgical robotics, prosthetic devices, and rehabilitation equipment. The precision requirements in these applications often exceed those in traditional industrial sectors, driving demand for more advanced analytical capabilities.
Construction and civil engineering markets are increasingly adopting MPC force analysis solutions for complex structural designs, particularly in high-rise buildings, bridges, and infrastructure projects where multiple load paths and constraint conditions must be simultaneously evaluated. The integration of Building Information Modeling with advanced force analysis capabilities has created new market opportunities.
The market demand is further amplified by regulatory requirements across industries that mandate comprehensive force analysis documentation for safety-critical applications. This regulatory pressure, combined with the increasing complexity of modern engineering systems, continues to drive sustained growth in the MPC force analysis solutions market.
Current State and Challenges in MPC Force Computation Methods
Multi-point constraint (MPC) force computation represents a critical challenge in computational mechanics, where the accurate determination of constraint forces directly impacts simulation fidelity and structural analysis reliability. Current methodologies predominantly rely on Lagrange multiplier techniques, penalty methods, and augmented Lagrangian approaches, each presenting distinct computational characteristics and accuracy trade-offs.
The Lagrange multiplier method remains the most theoretically rigorous approach, formulating constraint forces as additional unknowns in the system equations. This method ensures exact constraint satisfaction but significantly increases the system's degrees of freedom, leading to larger, often ill-conditioned matrices. The resulting saddle-point problems require specialized solvers and can exhibit numerical instabilities, particularly when constraints become nearly dependent or when dealing with large-scale systems.
Penalty methods offer computational efficiency by incorporating constraint violations through penalty parameters, eliminating the need for additional variables. However, selecting appropriate penalty values presents a fundamental challenge: insufficient penalties result in constraint violations, while excessive values cause numerical conditioning problems. The method's accuracy heavily depends on this parameter selection, making it problem-dependent and requiring extensive calibration.
Contemporary implementations face significant scalability issues when handling complex multi-body systems with numerous interconnected constraints. The computational complexity grows substantially with constraint density, creating bottlenecks in real-time applications such as interactive simulations and control systems. Memory requirements and solution times become prohibitive for large-scale problems, limiting practical applications.
Numerical stability represents another persistent challenge, particularly in dynamic simulations where constraint forces must be computed at each time step. Accumulated errors can lead to constraint drift, where initially satisfied constraints gradually violate over time. Current stabilization techniques, including Baumgarte stabilization and projection methods, provide partial solutions but introduce additional computational overhead and parameter tuning requirements.
The integration of MPC force computation with modern parallel computing architectures remains underdeveloped. Most existing algorithms exhibit inherently sequential characteristics, limiting their effectiveness on GPU-based systems and distributed computing platforms. This limitation becomes increasingly critical as computational demands grow and hardware architectures evolve toward massively parallel processing.
Emerging applications in flexible multibody dynamics, contact mechanics, and coupled field problems demand more sophisticated constraint handling capabilities. Traditional methods struggle with time-varying constraints, inequality constraints, and coupled physics scenarios, necessitating hybrid approaches that combine multiple computational strategies while maintaining numerical robustness and computational efficiency.
The Lagrange multiplier method remains the most theoretically rigorous approach, formulating constraint forces as additional unknowns in the system equations. This method ensures exact constraint satisfaction but significantly increases the system's degrees of freedom, leading to larger, often ill-conditioned matrices. The resulting saddle-point problems require specialized solvers and can exhibit numerical instabilities, particularly when constraints become nearly dependent or when dealing with large-scale systems.
Penalty methods offer computational efficiency by incorporating constraint violations through penalty parameters, eliminating the need for additional variables. However, selecting appropriate penalty values presents a fundamental challenge: insufficient penalties result in constraint violations, while excessive values cause numerical conditioning problems. The method's accuracy heavily depends on this parameter selection, making it problem-dependent and requiring extensive calibration.
Contemporary implementations face significant scalability issues when handling complex multi-body systems with numerous interconnected constraints. The computational complexity grows substantially with constraint density, creating bottlenecks in real-time applications such as interactive simulations and control systems. Memory requirements and solution times become prohibitive for large-scale problems, limiting practical applications.
Numerical stability represents another persistent challenge, particularly in dynamic simulations where constraint forces must be computed at each time step. Accumulated errors can lead to constraint drift, where initially satisfied constraints gradually violate over time. Current stabilization techniques, including Baumgarte stabilization and projection methods, provide partial solutions but introduce additional computational overhead and parameter tuning requirements.
The integration of MPC force computation with modern parallel computing architectures remains underdeveloped. Most existing algorithms exhibit inherently sequential characteristics, limiting their effectiveness on GPU-based systems and distributed computing platforms. This limitation becomes increasingly critical as computational demands grow and hardware architectures evolve toward massively parallel processing.
Emerging applications in flexible multibody dynamics, contact mechanics, and coupled field problems demand more sophisticated constraint handling capabilities. Traditional methods struggle with time-varying constraints, inequality constraints, and coupled physics scenarios, necessitating hybrid approaches that combine multiple computational strategies while maintaining numerical robustness and computational efficiency.
Existing MPC Force Calculation Algorithms and Approaches
01 Multi-point constraint implementation in finite element analysis
Methods and systems for implementing multi-point constraints in finite element analysis to simulate complex mechanical behaviors. These techniques involve establishing constraint equations between multiple nodes or degrees of freedom to accurately represent physical connections and interactions in structural simulations. The approach enables efficient computation of constraint forces while maintaining numerical stability and accuracy in large-scale finite element models.- Multi-point constraint implementation in finite element analysis: Methods and systems for implementing multi-point constraints in finite element analysis to simulate complex mechanical behaviors. These techniques involve establishing constraint equations between multiple nodes or degrees of freedom to accurately represent physical connections and interactions in structural simulations. The approach enables efficient computation of constraint forces while maintaining numerical stability and accuracy in large-scale models.
- Constraint force calculation in mechanical systems: Techniques for calculating and analyzing constraint forces in multi-body mechanical systems where multiple components are connected through various types of joints and constraints. These methods involve formulating mathematical models to determine reaction forces at constraint points, enabling accurate prediction of system behavior under different loading conditions. The approaches are particularly useful for optimizing mechanical designs and ensuring structural integrity.
- Multi-point constraint handling in structural optimization: Methods for incorporating multi-point constraints in structural optimization processes to achieve desired performance characteristics while satisfying multiple design requirements simultaneously. These techniques balance competing objectives such as weight reduction, stress distribution, and displacement limits across multiple locations in a structure. The optimization algorithms account for constraint forces to ensure feasible and practical design solutions.
- Constraint force management in robotic and automation systems: Approaches for managing and controlling constraint forces in robotic manipulators and automated systems where multiple contact points or kinematic constraints exist. These methods enable precise force control and compliance management at multiple interaction points, improving system performance and safety. The techniques are applicable to assembly operations, collaborative robotics, and precision manufacturing processes.
- Numerical methods for multi-constraint force resolution: Computational algorithms and numerical techniques for resolving forces in systems with multiple simultaneous constraints. These methods address challenges in solving coupled constraint equations, handling redundant constraints, and ensuring convergence in iterative solution procedures. The approaches improve computational efficiency and accuracy in simulating complex systems with numerous interacting constraints and contact conditions.
02 Contact force calculation with multiple constraint points
Techniques for calculating contact forces at multiple constraint points in mechanical systems and assemblies. These methods involve determining reaction forces and moments at various contact locations simultaneously, considering the interaction between different constraint points. The approach is particularly useful for analyzing complex contact scenarios in multi-body dynamics and collision detection applications.Expand Specific Solutions03 Constraint force optimization in multi-body systems
Optimization methods for managing constraint forces in multi-body dynamic systems with multiple connection points. These techniques focus on minimizing computational complexity while ensuring accurate force distribution across constraint points. The methods incorporate iterative algorithms and numerical solvers to handle redundant constraints and improve simulation efficiency in complex mechanical assemblies.Expand Specific Solutions04 Parallel processing of multi-point constraint equations
Parallel computing approaches for solving multi-point constraint equations in large-scale simulations. These methods distribute the computational load across multiple processors to accelerate the solution of constraint force problems. The techniques employ domain decomposition and matrix partitioning strategies to efficiently handle systems with numerous constraint points and degrees of freedom.Expand Specific Solutions05 Adaptive constraint force management in dynamic simulations
Adaptive algorithms for managing constraint forces in time-varying dynamic simulations with multiple constraint points. These methods automatically adjust constraint parameters and solution strategies based on system behavior and numerical stability requirements. The approach includes error estimation and adaptive time-stepping techniques to maintain accuracy while handling changing constraint conditions during simulation.Expand Specific Solutions
Key Players in CAE Software and MPC Analysis Industry
The multi-point constraint force calculation technology represents a mature field within computational mechanics and simulation, currently experiencing steady growth driven by expanding applications across gaming, robotics, automotive, and medical sectors. The market demonstrates significant scale with established players like Electronic Arts and Sony Group leveraging these technologies for advanced physics simulations in entertainment, while industrial giants including Toyota Central R&D Labs, Kawasaki Heavy Industries, and KUKA Deutschland integrate sophisticated constraint solving into robotics and manufacturing systems. Technology maturity varies across segments, with gaming applications showing high sophistication through companies like SAP SE providing enterprise solutions, while emerging applications in medical robotics through Beijing Longwood Valley Medical Technology and precision manufacturing via Murata Manufacturing represent growing frontiers. Research institutions including Max Planck Gesellschaft, Tohoku University, and multiple Chinese universities continue advancing theoretical foundations, indicating robust ongoing development despite the field's established nature.
Sony Group Corp.
Technical Solution: Sony develops multi-point constraint force calculation algorithms primarily for entertainment and consumer electronics applications, including haptic feedback systems and robotic camera platforms. Their approach focuses on lightweight computational methods that can operate efficiently on embedded systems while providing accurate force distribution analysis across multiple contact points. The system integrates sensor data processing with constraint-based control algorithms to enable precise force feedback in gaming controllers, VR/AR devices, and automated camera positioning systems. Their methodology emphasizes user experience optimization through smooth force transitions and minimal computational latency, utilizing optimized numerical solvers designed for consumer-grade hardware platforms.
Strengths: Consumer electronics expertise, optimized for embedded systems and user experience. Weaknesses: Limited to consumer applications, less suitable for heavy industrial or high-precision scientific applications.
GM Global Technology Operations LLC
Technical Solution: GM develops advanced multi-point constraint force calculation algorithms for automotive crash simulation and vehicle dynamics analysis. Their approach integrates Lagrange multiplier methods with penalty-based constraint enforcement to handle complex mechanical assemblies in vehicle structures. The system employs iterative solvers that can process thousands of constraint points simultaneously while maintaining numerical stability. Their proprietary algorithms optimize computational efficiency by using sparse matrix techniques and parallel processing architectures, enabling real-time force distribution analysis across multiple contact points in vehicle safety systems and powertrain components.
Strengths: Extensive automotive application experience, robust real-time processing capabilities. Weaknesses: Limited to automotive-specific scenarios, proprietary algorithms restrict broader applicability.
Core Innovations in Lagrange Multiplier Force Extraction Methods
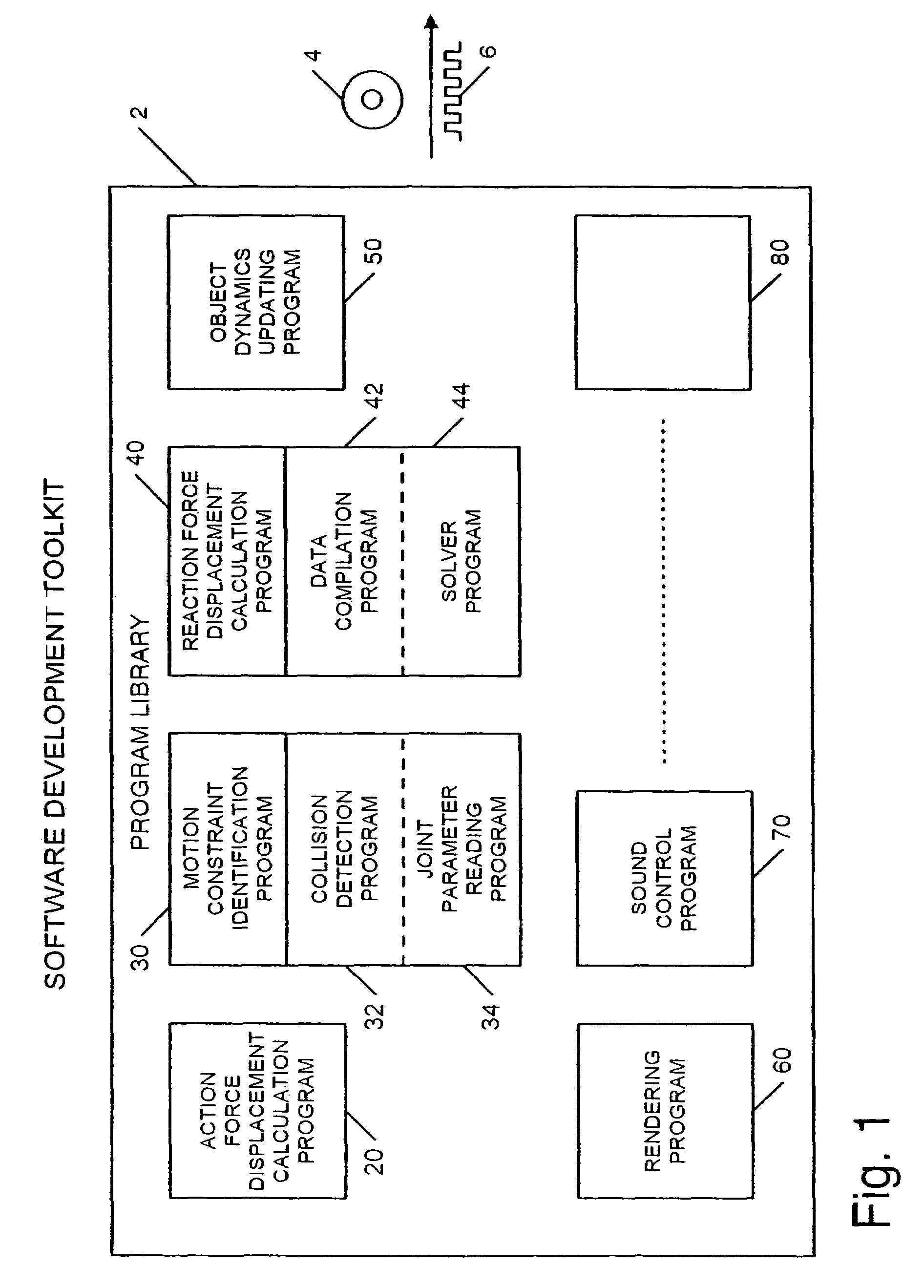
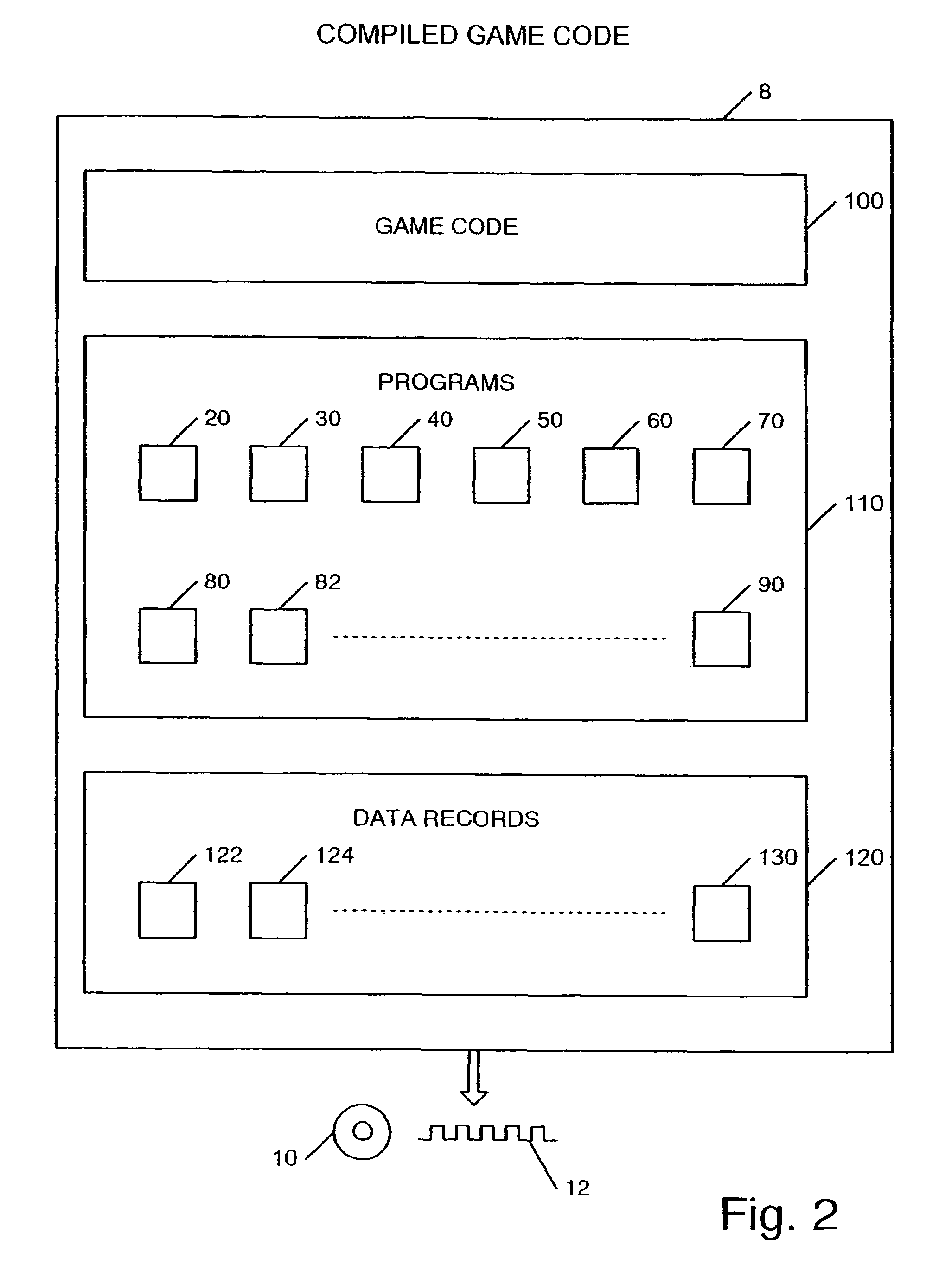
Computer simulation of body dynamics including a solver that solves in linear time for a set of constraints
PatentActiveUS7505883B2
Innovation
- The simulator iteratively evaluates equations to calculate motion parameters complying with constraints, using a matrix equation that accounts for displacements and reaction forces, allowing for separate evaluation of each constraint and reducing the need for large Jacobian matrix calculations.
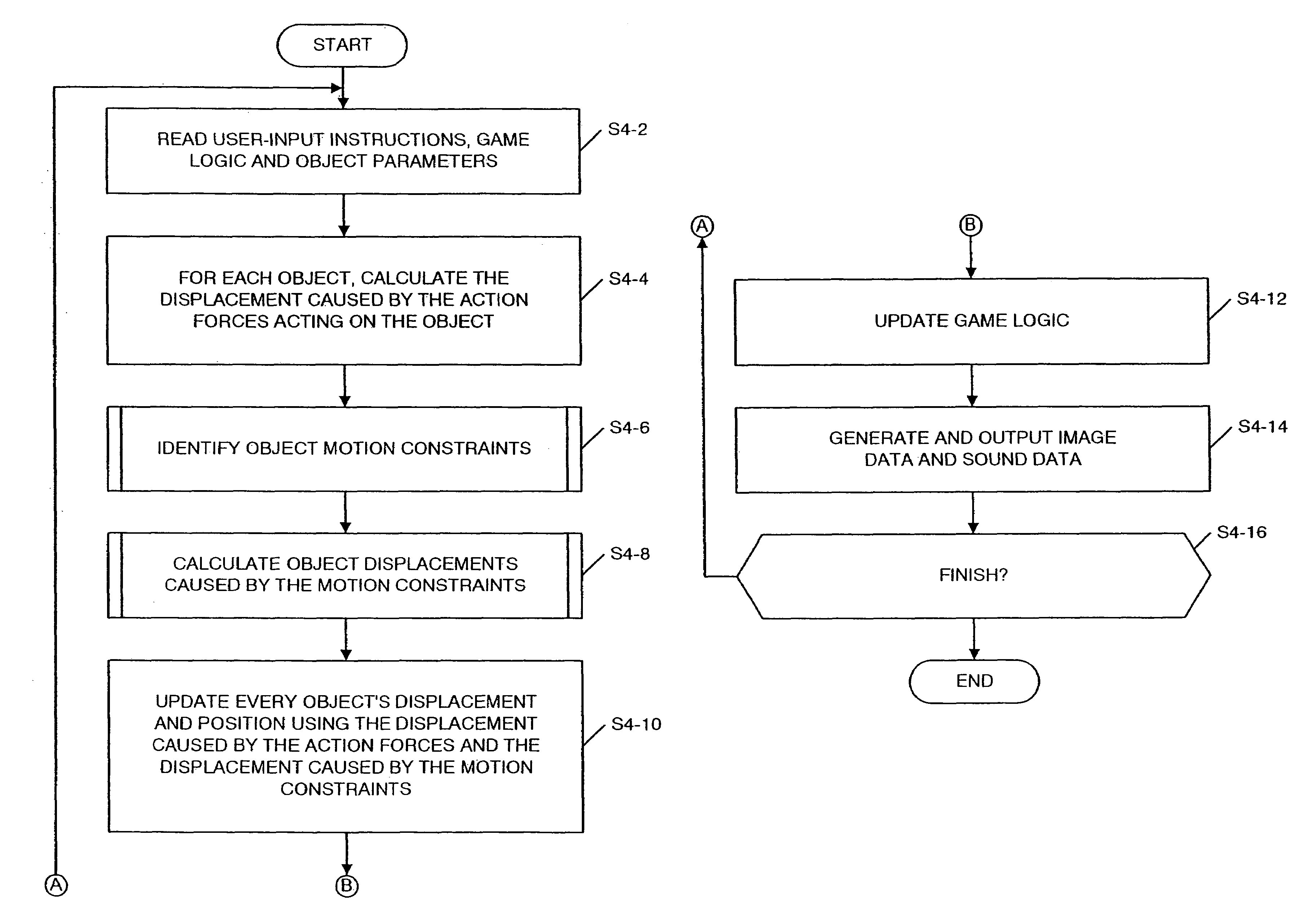

Computer simulation of body dynamics including a solver that solves in linear time for a set of constraints using vector processing
PatentActiveUS7493244B2
Innovation
- The simulator iteratively evaluates equations to calculate constraint reaction components using vector processing, allowing simultaneous calculation of multiple components from read data, and defines constraints in terms of displacements to ensure accurate position updates without imparting additional velocity or acceleration.




Computational Efficiency Optimization for Large-scale MPC Systems
Large-scale Multi-Point Constraint (MPC) systems present significant computational challenges that directly impact real-time performance and system scalability. The computational complexity grows exponentially with the number of constraint points, degrees of freedom, and the size of constraint matrices, making efficiency optimization a critical concern for practical implementations.
Matrix decomposition techniques represent the primary bottleneck in MPC force calculations. Traditional direct solvers using LU or Cholesky decomposition exhibit O(n³) complexity, which becomes prohibitive for systems with thousands of constraints. Sparse matrix algorithms offer substantial improvements by exploiting the inherent sparsity patterns in constraint Jacobians, reducing computational overhead by orders of magnitude in well-structured systems.
Iterative solving methods provide alternative approaches for large-scale systems. Conjugate gradient and GMRES algorithms demonstrate superior scalability characteristics, particularly when combined with effective preconditioning strategies. These methods can achieve convergence in O(n²) or better complexity under favorable conditions, though convergence rates depend heavily on matrix conditioning and constraint coupling density.
Parallel computing architectures unlock significant performance gains through strategic decomposition of constraint calculations. GPU-based implementations leverage massive parallelization for matrix operations, while multi-core CPU approaches focus on domain decomposition and constraint partitioning. Hybrid CPU-GPU strategies often yield optimal performance by distributing different computational phases according to hardware strengths.
Algorithmic optimizations targeting constraint system characteristics provide additional efficiency improvements. Constraint clustering techniques group spatially or functionally related constraints to minimize cross-coupling computations. Adaptive time-stepping methods adjust computational precision based on system dynamics, reducing unnecessary calculations during stable periods while maintaining accuracy during critical transitions.
Memory management strategies significantly impact performance in large-scale systems. Cache-optimized data structures and memory access patterns reduce bandwidth limitations that often dominate computational costs. Block-structured storage formats and data locality optimization techniques can improve performance by 2-5x compared to naive implementations, particularly important for systems requiring real-time response capabilities.
Matrix decomposition techniques represent the primary bottleneck in MPC force calculations. Traditional direct solvers using LU or Cholesky decomposition exhibit O(n³) complexity, which becomes prohibitive for systems with thousands of constraints. Sparse matrix algorithms offer substantial improvements by exploiting the inherent sparsity patterns in constraint Jacobians, reducing computational overhead by orders of magnitude in well-structured systems.
Iterative solving methods provide alternative approaches for large-scale systems. Conjugate gradient and GMRES algorithms demonstrate superior scalability characteristics, particularly when combined with effective preconditioning strategies. These methods can achieve convergence in O(n²) or better complexity under favorable conditions, though convergence rates depend heavily on matrix conditioning and constraint coupling density.
Parallel computing architectures unlock significant performance gains through strategic decomposition of constraint calculations. GPU-based implementations leverage massive parallelization for matrix operations, while multi-core CPU approaches focus on domain decomposition and constraint partitioning. Hybrid CPU-GPU strategies often yield optimal performance by distributing different computational phases according to hardware strengths.
Algorithmic optimizations targeting constraint system characteristics provide additional efficiency improvements. Constraint clustering techniques group spatially or functionally related constraints to minimize cross-coupling computations. Adaptive time-stepping methods adjust computational precision based on system dynamics, reducing unnecessary calculations during stable periods while maintaining accuracy during critical transitions.
Memory management strategies significantly impact performance in large-scale systems. Cache-optimized data structures and memory access patterns reduce bandwidth limitations that often dominate computational costs. Block-structured storage formats and data locality optimization techniques can improve performance by 2-5x compared to naive implementations, particularly important for systems requiring real-time response capabilities.
Integration Standards for MPC Force Data in Engineering Workflows
The integration of Multi-Point Constraint (MPC) force data into engineering workflows requires standardized protocols to ensure seamless data exchange across different simulation platforms and analysis tools. Current industry practices reveal significant fragmentation in data formats, with various finite element analysis software packages employing proprietary schemas for MPC force representation. This lack of uniformity creates substantial barriers to cross-platform collaboration and automated workflow implementation.
Established integration standards primarily focus on three core components: data structure standardization, interface protocol definition, and validation methodology specification. The data structure standards define how MPC force vectors, constraint equations, and associated metadata should be formatted for universal compatibility. These standards typically incorporate XML-based schemas or JSON formats that can accommodate complex constraint relationships while maintaining computational efficiency during data parsing operations.
Interface protocol standards address the communication mechanisms between different software systems handling MPC calculations. These protocols establish standardized API endpoints, data transmission formats, and error handling procedures that enable automated data flow between preprocessing, solving, and postprocessing stages. Modern implementations increasingly adopt RESTful API architectures with standardized HTTP methods for MPC data operations, facilitating cloud-based distributed computing environments.
Validation methodology standards ensure data integrity throughout the integration process by defining checksum algorithms, constraint equation verification procedures, and force equilibrium validation protocols. These standards specify mandatory validation checkpoints where MPC force data must undergo consistency checks before proceeding to subsequent workflow stages. Implementation typically involves automated validation scripts that verify constraint satisfaction, force balance equations, and numerical stability criteria.
Industry adoption of these integration standards varies significantly across different engineering domains, with aerospace and automotive sectors leading implementation efforts due to their complex multi-physics simulation requirements. However, emerging standards from organizations like ISO and ASME are gradually establishing more comprehensive frameworks for MPC data integration, promising improved interoperability and reduced workflow complexity in future engineering applications.
Established integration standards primarily focus on three core components: data structure standardization, interface protocol definition, and validation methodology specification. The data structure standards define how MPC force vectors, constraint equations, and associated metadata should be formatted for universal compatibility. These standards typically incorporate XML-based schemas or JSON formats that can accommodate complex constraint relationships while maintaining computational efficiency during data parsing operations.
Interface protocol standards address the communication mechanisms between different software systems handling MPC calculations. These protocols establish standardized API endpoints, data transmission formats, and error handling procedures that enable automated data flow between preprocessing, solving, and postprocessing stages. Modern implementations increasingly adopt RESTful API architectures with standardized HTTP methods for MPC data operations, facilitating cloud-based distributed computing environments.
Validation methodology standards ensure data integrity throughout the integration process by defining checksum algorithms, constraint equation verification procedures, and force equilibrium validation protocols. These standards specify mandatory validation checkpoints where MPC force data must undergo consistency checks before proceeding to subsequent workflow stages. Implementation typically involves automated validation scripts that verify constraint satisfaction, force balance equations, and numerical stability criteria.
Industry adoption of these integration standards varies significantly across different engineering domains, with aerospace and automotive sectors leading implementation efforts due to their complex multi-physics simulation requirements. However, emerging standards from organizations like ISO and ASME are gradually establishing more comprehensive frameworks for MPC data integration, promising improved interoperability and reduced workflow complexity in future engineering applications.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!