

ARM Architecture in Robotics: Scalability and Precision
MAR 25, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
ARM Robotics Architecture Background and Objectives
ARM architecture has emerged as a transformative force in modern robotics, fundamentally reshaping how robotic systems are designed, deployed, and scaled across diverse applications. The evolution from traditional x86-based robotic controllers to ARM-based solutions represents a paradigm shift driven by the increasing demands for energy efficiency, computational performance, and real-time processing capabilities in autonomous systems.
The historical trajectory of ARM in robotics began with simple embedded control applications in the early 2000s, where basic ARM7 and ARM9 processors managed elementary sensor interfaces and actuator controls. As robotic applications grew more sophisticated, the architecture evolved to support complex multi-core configurations, advanced signal processing units, and specialized neural processing engines that enable modern AI-driven robotic behaviors.
Current market dynamics reveal an accelerating adoption of ARM-based solutions across industrial automation, service robotics, autonomous vehicles, and collaborative robot platforms. This transition is primarily motivated by the architecture's superior power efficiency, which enables longer operational periods for battery-powered systems, and its scalable performance characteristics that can accommodate everything from simple sensor nodes to high-performance robotic brains.
The precision requirements in modern robotics have intensified significantly, demanding microsecond-level response times for safety-critical applications, sub-millimeter positioning accuracy for manufacturing robots, and real-time sensor fusion capabilities for autonomous navigation. ARM's deterministic execution models and low-latency interrupt handling mechanisms position it as an ideal foundation for meeting these stringent precision demands.
Scalability challenges in contemporary robotic deployments encompass both vertical scaling within individual robotic units and horizontal scaling across robotic fleets. The objective is to develop ARM-based architectures that can seamlessly scale from edge sensor processing to centralized fleet coordination while maintaining consistent performance profiles and development frameworks.
The primary technical objectives driving ARM adoption in robotics include achieving deterministic real-time performance for safety-critical control loops, implementing efficient parallel processing for simultaneous localization and mapping algorithms, enabling seamless integration of machine learning inference engines, and establishing standardized development platforms that can accelerate robotic application deployment across diverse market segments.
The historical trajectory of ARM in robotics began with simple embedded control applications in the early 2000s, where basic ARM7 and ARM9 processors managed elementary sensor interfaces and actuator controls. As robotic applications grew more sophisticated, the architecture evolved to support complex multi-core configurations, advanced signal processing units, and specialized neural processing engines that enable modern AI-driven robotic behaviors.
Current market dynamics reveal an accelerating adoption of ARM-based solutions across industrial automation, service robotics, autonomous vehicles, and collaborative robot platforms. This transition is primarily motivated by the architecture's superior power efficiency, which enables longer operational periods for battery-powered systems, and its scalable performance characteristics that can accommodate everything from simple sensor nodes to high-performance robotic brains.
The precision requirements in modern robotics have intensified significantly, demanding microsecond-level response times for safety-critical applications, sub-millimeter positioning accuracy for manufacturing robots, and real-time sensor fusion capabilities for autonomous navigation. ARM's deterministic execution models and low-latency interrupt handling mechanisms position it as an ideal foundation for meeting these stringent precision demands.
Scalability challenges in contemporary robotic deployments encompass both vertical scaling within individual robotic units and horizontal scaling across robotic fleets. The objective is to develop ARM-based architectures that can seamlessly scale from edge sensor processing to centralized fleet coordination while maintaining consistent performance profiles and development frameworks.
The primary technical objectives driving ARM adoption in robotics include achieving deterministic real-time performance for safety-critical control loops, implementing efficient parallel processing for simultaneous localization and mapping algorithms, enabling seamless integration of machine learning inference engines, and establishing standardized development platforms that can accelerate robotic application deployment across diverse market segments.
Market Demand for ARM-based Robotic Systems
The global robotics market is experiencing unprecedented growth driven by increasing automation demands across multiple industries. Manufacturing sectors are leading this transformation, with automotive, electronics, and consumer goods companies seeking more flexible and cost-effective robotic solutions. ARM-based robotic systems are emerging as a compelling alternative to traditional x86 and proprietary architectures, offering superior power efficiency and processing capabilities essential for modern robotic applications.
Industrial automation represents the largest market segment for ARM-based robotics, where manufacturers require systems that can handle complex tasks while maintaining energy efficiency. The demand stems from the need for robots that can operate continuously in production environments without excessive power consumption or heat generation. ARM processors excel in these scenarios due to their inherently low-power design and ability to deliver sufficient computational performance for real-time control systems.
Service robotics constitutes another rapidly expanding market segment, encompassing healthcare, hospitality, and domestic applications. These environments demand robots with extended battery life, quiet operation, and compact form factors. ARM architecture addresses these requirements effectively, enabling the development of autonomous mobile robots, surgical assistants, and personal care devices that can operate for extended periods without frequent recharging or maintenance.
The collaborative robotics market is driving significant demand for ARM-based solutions, as cobots require sophisticated sensor integration and real-time processing capabilities. These systems must safely interact with human workers while maintaining precise control and responsiveness. ARM processors provide the necessary computational power for advanced computer vision, force sensing, and machine learning algorithms that enable safe human-robot collaboration.
Edge computing requirements in robotics are creating new market opportunities for ARM-based systems. Modern robotic applications increasingly rely on local processing for computer vision, natural language processing, and decision-making algorithms. ARM architecture supports these computational demands while maintaining the power efficiency crucial for mobile and battery-operated robotic platforms.
The agricultural robotics sector is emerging as a significant growth area, with farmers seeking autonomous solutions for crop monitoring, harvesting, and precision agriculture. These applications require robust, weather-resistant systems capable of operating in remote locations with limited power infrastructure. ARM-based platforms offer the ideal combination of processing power and energy efficiency needed for extended field operations.
Market demand is also being driven by the proliferation of Internet of Things integration in robotics, where ARM processors serve as natural bridges between robotic systems and cloud-based services. This connectivity enables remote monitoring, predictive maintenance, and fleet management capabilities that are increasingly valued by enterprise customers seeking comprehensive robotic solutions.
Industrial automation represents the largest market segment for ARM-based robotics, where manufacturers require systems that can handle complex tasks while maintaining energy efficiency. The demand stems from the need for robots that can operate continuously in production environments without excessive power consumption or heat generation. ARM processors excel in these scenarios due to their inherently low-power design and ability to deliver sufficient computational performance for real-time control systems.
Service robotics constitutes another rapidly expanding market segment, encompassing healthcare, hospitality, and domestic applications. These environments demand robots with extended battery life, quiet operation, and compact form factors. ARM architecture addresses these requirements effectively, enabling the development of autonomous mobile robots, surgical assistants, and personal care devices that can operate for extended periods without frequent recharging or maintenance.
The collaborative robotics market is driving significant demand for ARM-based solutions, as cobots require sophisticated sensor integration and real-time processing capabilities. These systems must safely interact with human workers while maintaining precise control and responsiveness. ARM processors provide the necessary computational power for advanced computer vision, force sensing, and machine learning algorithms that enable safe human-robot collaboration.
Edge computing requirements in robotics are creating new market opportunities for ARM-based systems. Modern robotic applications increasingly rely on local processing for computer vision, natural language processing, and decision-making algorithms. ARM architecture supports these computational demands while maintaining the power efficiency crucial for mobile and battery-operated robotic platforms.
The agricultural robotics sector is emerging as a significant growth area, with farmers seeking autonomous solutions for crop monitoring, harvesting, and precision agriculture. These applications require robust, weather-resistant systems capable of operating in remote locations with limited power infrastructure. ARM-based platforms offer the ideal combination of processing power and energy efficiency needed for extended field operations.
Market demand is also being driven by the proliferation of Internet of Things integration in robotics, where ARM processors serve as natural bridges between robotic systems and cloud-based services. This connectivity enables remote monitoring, predictive maintenance, and fleet management capabilities that are increasingly valued by enterprise customers seeking comprehensive robotic solutions.
Current ARM Implementation Status in Robotics
ARM processors have established a significant foothold in the robotics industry, with widespread adoption across various robotic platforms ranging from consumer-grade service robots to industrial automation systems. The architecture's inherent energy efficiency and computational capabilities have made it particularly attractive for mobile robotics applications where power consumption directly impacts operational duration and system performance.
Current implementation patterns show ARM Cortex-A series processors dominating high-performance robotics applications, particularly in autonomous navigation systems and computer vision processing. Major robotics manufacturers including Boston Dynamics, ABB, and KUKA have integrated ARM-based solutions into their latest generation platforms. The Cortex-A78 and newer variants are increasingly deployed in humanoid robots and collaborative robots (cobots) where real-time processing demands are critical.
In the embedded robotics segment, ARM Cortex-M series microcontrollers maintain strong market presence, powering sensor fusion systems, motor control units, and communication interfaces. These implementations typically focus on deterministic real-time performance rather than raw computational power, making them ideal for safety-critical robotic subsystems and precise actuator control mechanisms.
The scalability aspect of ARM implementation reveals a tiered approach across the industry. Entry-level educational and hobbyist robots predominantly utilize ARM Cortex-M4 and M7 processors, while professional service robots employ multi-core Cortex-A configurations. High-end industrial robots increasingly adopt ARM-based system-on-chip solutions that integrate specialized processing units for machine learning inference and advanced control algorithms.
Precision-oriented implementations demonstrate ARM's capability in handling demanding control loops and sensor processing tasks. Current deployments achieve sub-millisecond response times in critical control applications, with some implementations reaching microsecond-level precision in specialized manufacturing robots. The architecture's support for floating-point operations and SIMD instructions enables sophisticated algorithms for trajectory planning and dynamic motion control.
However, implementation challenges persist in areas requiring extreme computational density. Graphics-intensive applications and complex AI workloads often necessitate hybrid architectures combining ARM processors with dedicated accelerators, indicating current limitations in pure ARM-based solutions for the most demanding robotics applications.
Current implementation patterns show ARM Cortex-A series processors dominating high-performance robotics applications, particularly in autonomous navigation systems and computer vision processing. Major robotics manufacturers including Boston Dynamics, ABB, and KUKA have integrated ARM-based solutions into their latest generation platforms. The Cortex-A78 and newer variants are increasingly deployed in humanoid robots and collaborative robots (cobots) where real-time processing demands are critical.
In the embedded robotics segment, ARM Cortex-M series microcontrollers maintain strong market presence, powering sensor fusion systems, motor control units, and communication interfaces. These implementations typically focus on deterministic real-time performance rather than raw computational power, making them ideal for safety-critical robotic subsystems and precise actuator control mechanisms.
The scalability aspect of ARM implementation reveals a tiered approach across the industry. Entry-level educational and hobbyist robots predominantly utilize ARM Cortex-M4 and M7 processors, while professional service robots employ multi-core Cortex-A configurations. High-end industrial robots increasingly adopt ARM-based system-on-chip solutions that integrate specialized processing units for machine learning inference and advanced control algorithms.
Precision-oriented implementations demonstrate ARM's capability in handling demanding control loops and sensor processing tasks. Current deployments achieve sub-millisecond response times in critical control applications, with some implementations reaching microsecond-level precision in specialized manufacturing robots. The architecture's support for floating-point operations and SIMD instructions enables sophisticated algorithms for trajectory planning and dynamic motion control.
However, implementation challenges persist in areas requiring extreme computational density. Graphics-intensive applications and complex AI workloads often necessitate hybrid architectures combining ARM processors with dedicated accelerators, indicating current limitations in pure ARM-based solutions for the most demanding robotics applications.
Existing ARM Scalability Solutions for Robots
01 Scalable processor architecture with variable precision support
ARM architectures can be designed to support scalable processing capabilities with variable precision arithmetic operations. This allows processors to dynamically adjust computational precision based on application requirements, enabling efficient resource utilization. The architecture can switch between different precision modes such as single precision, double precision, and mixed precision to optimize performance and power consumption for diverse workloads.- Scalable processor architecture with variable precision support: ARM architectures can be designed to support scalable processing capabilities with variable precision arithmetic operations. This allows processors to dynamically adjust computational precision based on application requirements, enabling efficient resource utilization. The architecture can switch between different precision modes such as single precision, double precision, and mixed precision to optimize performance and power consumption for diverse workloads.
- Vector processing and SIMD extensions for scalability: Scalability in ARM architectures is enhanced through vector processing units and Single Instruction Multiple Data extensions. These features enable parallel processing of multiple data elements simultaneously, improving throughput for data-intensive applications. The architecture supports configurable vector lengths and data types, allowing adaptation to different computational requirements while maintaining precision across operations.
- Floating-point unit architecture with configurable precision: ARM processors incorporate floating-point units with configurable precision capabilities to balance accuracy and performance. The architecture supports multiple floating-point formats and rounding modes, enabling applications to select appropriate precision levels. This flexibility allows the system to scale from low-precision operations for machine learning inference to high-precision calculations for scientific computing.
- Multi-core scalability with precision-aware scheduling: Scalable ARM architectures implement multi-core designs with precision-aware task scheduling mechanisms. The system can distribute computational tasks across multiple cores while maintaining required precision levels for each operation. This approach enables efficient scaling of processing power while ensuring numerical accuracy requirements are met across different application domains.
- Adaptive precision control for power efficiency: ARM architectures incorporate adaptive precision control mechanisms to optimize power efficiency while maintaining computational accuracy. The system can dynamically adjust precision levels based on power constraints and performance requirements. This capability enables energy-efficient operation by reducing precision when full accuracy is not necessary, extending battery life in mobile and embedded applications.
02 Multi-core scalability with precision control mechanisms
Scalable ARM architectures incorporate multi-core designs that enable parallel processing while maintaining precision control across cores. The architecture supports coherent data sharing and synchronization mechanisms that ensure computational accuracy is preserved when scaling across multiple processing units. This approach allows systems to scale performance linearly while maintaining deterministic precision requirements for critical applications.Expand Specific Solutions03 Adaptive precision floating-point units
ARM processors can implement adaptive floating-point units that dynamically adjust precision levels based on computational needs. These units support multiple precision formats and can automatically select the appropriate precision mode to balance accuracy with performance. The architecture includes hardware mechanisms for detecting precision requirements and configuring the floating-point pipeline accordingly, reducing unnecessary computational overhead while maintaining required accuracy.Expand Specific Solutions04 Scalable vector processing with configurable precision
Vector processing extensions in ARM architectures provide scalability through configurable vector lengths and precision settings. The architecture supports variable-width vector operations that can be adjusted to match data precision requirements, enabling efficient processing of both high-precision scientific computations and lower-precision machine learning workloads. This flexibility allows a single architecture to serve diverse application domains with optimal efficiency.Expand Specific Solutions05 Hierarchical memory architecture for precision-aware scaling
ARM architectures implement hierarchical memory systems that support precision-aware data management across different cache levels and memory tiers. The memory subsystem can optimize data placement and movement based on precision requirements, reducing bandwidth consumption and improving scalability. This architecture enables efficient scaling of memory resources while maintaining data integrity and precision across different processing elements and memory hierarchies.Expand Specific Solutions
Major ARM Robotics Platform Providers
The ARM architecture in robotics represents a rapidly evolving competitive landscape characterized by significant market expansion and diverse technological maturity levels across key players. The industry is transitioning from early adoption to mainstream integration, with market growth driven by increasing demand for collaborative and precision robotics. Leading robotics companies like Kassow Robots ApS, Shanghai Flexiv Robotics Technology, KUKA Deutschland GmbH, and Teradyne Robotics A/S demonstrate advanced ARM implementation capabilities, while technology giants such as Sony Group Corp. and Tencent Technology leverage ARM's scalability for consumer and industrial applications. Research institutions including Nanyang Technological University, Beihang University, and Fraunhofer-Gesellschaft contribute foundational innovations. The technology maturity varies significantly, with established players like Airbus SE and Schaeffler Technologies showing sophisticated integration, while emerging companies like Cobionix Corp. represent next-generation autonomous applications, indicating a competitive environment spanning from prototype development to commercial deployment.
Kassow Robots ApS
Technical Solution: Kassow Robots utilizes ARM-based control architecture in their 7-axis collaborative robots, implementing ARM Cortex processors for redundant joint control and advanced path planning. The ARM architecture enables their unique 7-DOF configuration to achieve superior dexterity while maintaining precise positioning accuracy of ±0.1mm. Their scalable control system allows seamless integration of multiple robot units, with ARM processors handling complex inverse kinematics calculations and collision avoidance algorithms. The distributed ARM-based computing architecture supports real-time safety monitoring and adaptive motion control, making their robots suitable for both precision assembly tasks and collaborative human-robot interaction scenarios.
Strengths: Unique 7-axis design provides exceptional flexibility, strong collaborative safety features. Weaknesses: Higher complexity in programming and maintenance, limited payload capacity compared to traditional 6-axis robots.
Shanghai Flexiv Robotics Technology Co., Ltd.
Technical Solution: Flexiv develops adaptive robotic systems using ARM-based embedded controllers that combine force sensing with precision positioning. Their ARM Cortex-A series processors enable real-time processing of tactile feedback and visual data, allowing robots to perform delicate manipulation tasks with sub-millimeter accuracy. The scalable ARM architecture supports their modular robot design, where additional ARM cores can be integrated for enhanced computational capacity. Their force-controlled manipulation algorithms run on ARM processors, achieving 1kHz control loops for sensitive assembly operations while maintaining the flexibility to scale from desktop collaborative robots to industrial-grade systems.
Strengths: Advanced force control capabilities, flexible scalability, innovative adaptive algorithms. Weaknesses: Limited market presence compared to established players, newer technology with less field validation.
Core ARM Precision Control Technologies
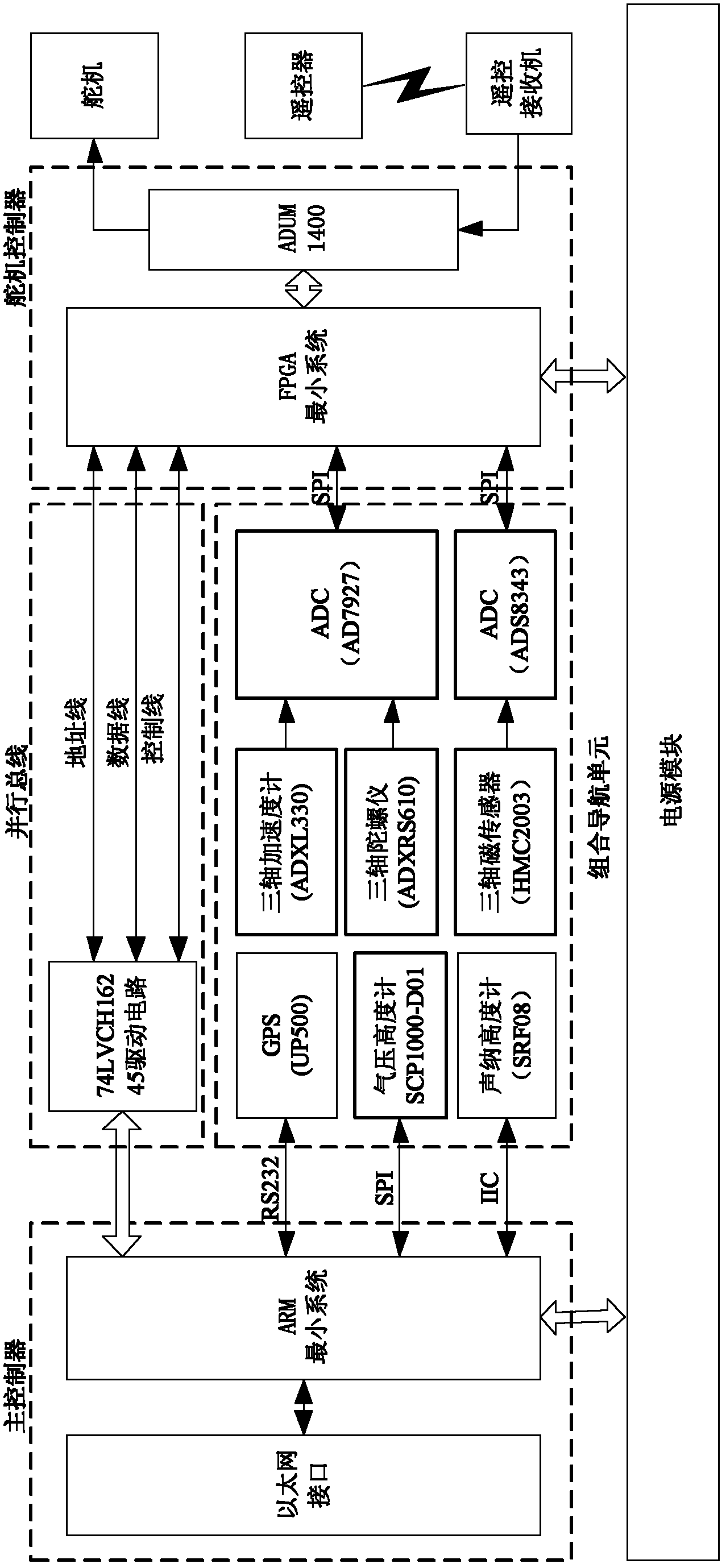
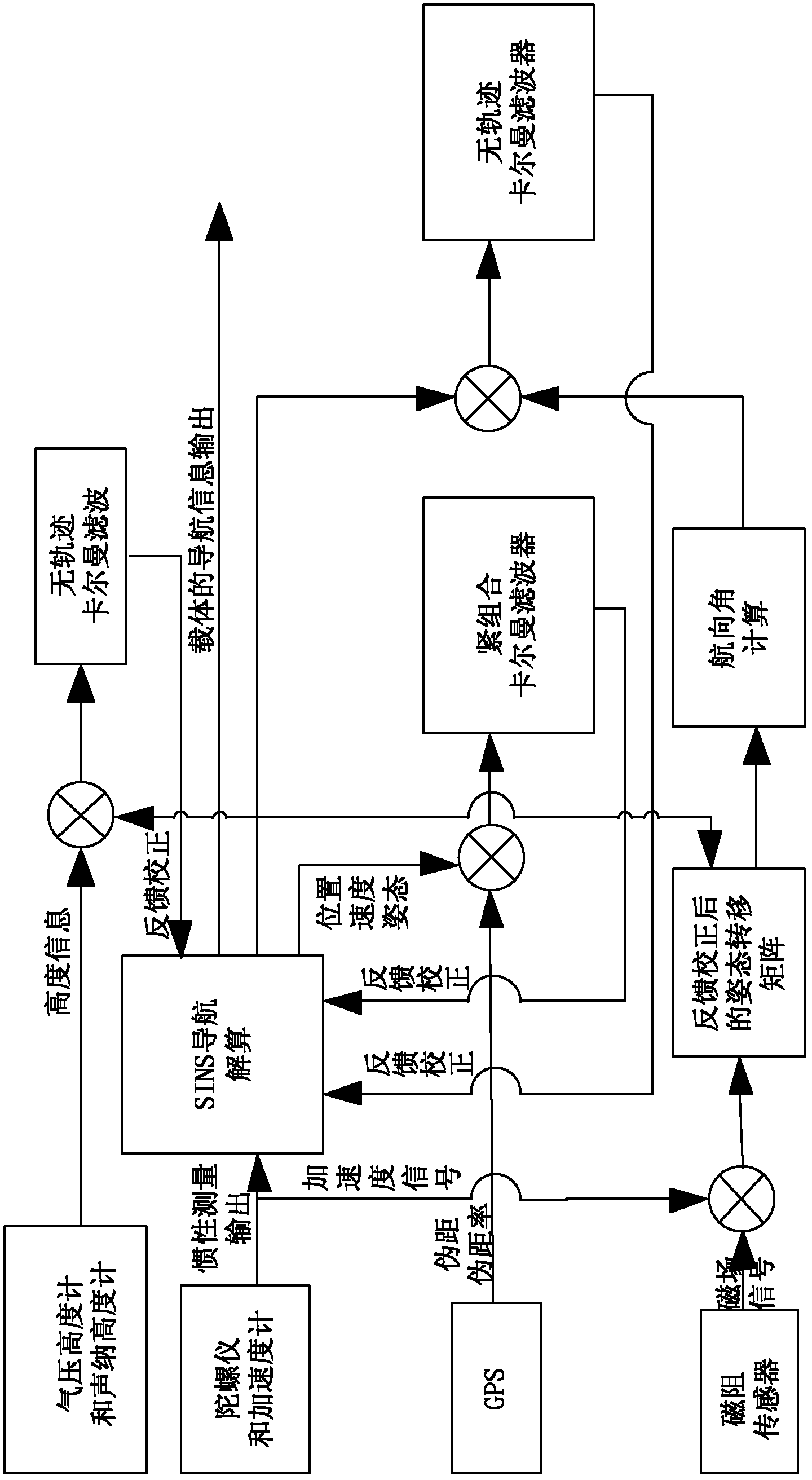
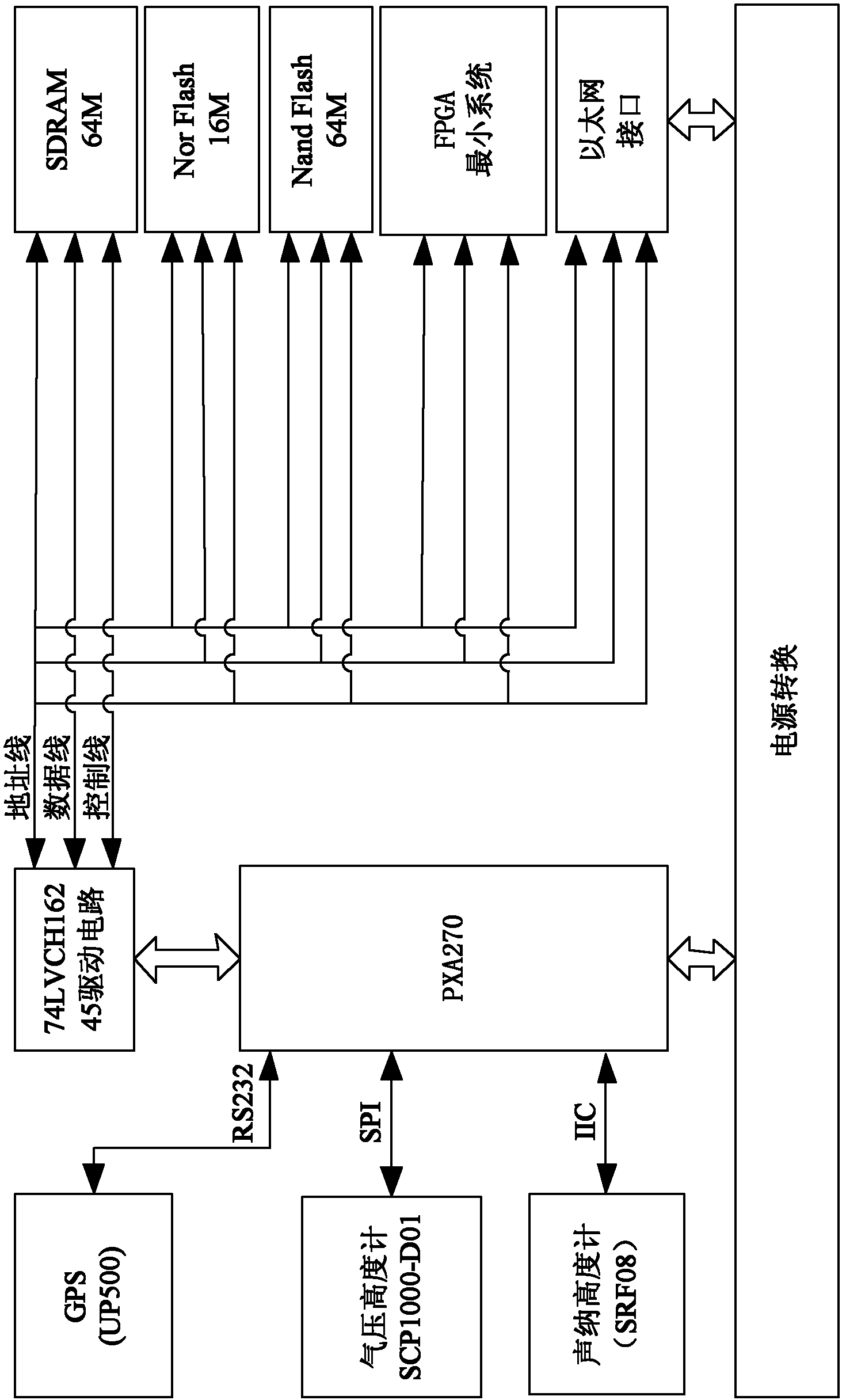
ARM (advanced RISC (reduced instruction set computer) machines) and FPGA (field-programmable gate array) based navigation and flight control system for unmanned helicopter
PatentInactiveCN102360218A
Innovation
- Using a navigation and autonomous flight control system based on ARM and FPGA, combined with GPS, gyroscope, accelerometer, magnetoresistive sensor, barometric altimeter and sonar altimeter, high-precision navigation is achieved through tightly combined GPS and SINS filters; using ARM The microprocessor runs the integrated navigation algorithm and flight control PID algorithm, and the FPGA is used for steering gear control and data collection to achieve switching between autonomous flight mode and remote control flight mode.

Robotic arm with advanced kinematics for precise industrial applications
PatentPendingIN202321049805A
Innovation
- A robotic arm system with advanced kinematics, incorporating sophisticated mathematical algorithms, high-precision actuators, sensors, and feedback mechanisms, along with a control interface for programming and customization, enabling precise trajectory calculation and real-time adjustments to ensure safe and accurate operation.

Real-time Performance Standards for ARM Robotics
Real-time performance standards for ARM-based robotics systems represent a critical framework that defines the temporal constraints and execution guarantees necessary for safe and effective robotic operations. These standards establish measurable benchmarks for response times, computational throughput, and deterministic behavior that ARM processors must achieve when deployed in robotic applications ranging from industrial automation to autonomous vehicles.
The foundation of ARM robotics real-time standards centers on deterministic execution guarantees, where system responses must occur within predefined time windows. Hard real-time requirements typically demand response times under 1 millisecond for critical safety functions, while soft real-time applications may tolerate latencies up to 10-100 milliseconds depending on the specific robotic task. ARM Cortex-R series processors specifically target these real-time requirements through dedicated interrupt handling and memory protection units.
Interrupt latency represents a fundamental performance metric, measuring the time between an external event occurrence and the processor's response initiation. ARM-based robotic systems must maintain interrupt response times below 10 microseconds for high-priority tasks such as emergency stops or collision avoidance. The ARM architecture's nested vectored interrupt controller enables prioritized interrupt handling, ensuring critical robotic functions receive immediate processor attention.
Memory access patterns and cache behavior significantly impact real-time performance consistency. ARM processors implement tightly-coupled memory and cache locking mechanisms to guarantee predictable memory access times. Robotic control algorithms require consistent memory performance to maintain stable control loops, particularly in applications involving precise motor control or sensor fusion where timing variations can compromise system stability.
Task scheduling and context switching overhead directly influence multi-threaded robotic applications. ARM processors must complete context switches within 5-20 microseconds to support concurrent execution of multiple robotic subsystems. Real-time operating systems optimized for ARM architecture implement priority-based scheduling algorithms that ensure time-critical robotic tasks receive adequate processor resources while maintaining overall system responsiveness.
Power consumption constraints intersect with performance requirements in mobile robotic platforms. ARM's dynamic voltage and frequency scaling capabilities must balance computational performance with energy efficiency while maintaining real-time guarantees. Battery-powered robots require ARM processors to deliver consistent performance across varying power states without compromising temporal constraints essential for safe autonomous operation.
The foundation of ARM robotics real-time standards centers on deterministic execution guarantees, where system responses must occur within predefined time windows. Hard real-time requirements typically demand response times under 1 millisecond for critical safety functions, while soft real-time applications may tolerate latencies up to 10-100 milliseconds depending on the specific robotic task. ARM Cortex-R series processors specifically target these real-time requirements through dedicated interrupt handling and memory protection units.
Interrupt latency represents a fundamental performance metric, measuring the time between an external event occurrence and the processor's response initiation. ARM-based robotic systems must maintain interrupt response times below 10 microseconds for high-priority tasks such as emergency stops or collision avoidance. The ARM architecture's nested vectored interrupt controller enables prioritized interrupt handling, ensuring critical robotic functions receive immediate processor attention.
Memory access patterns and cache behavior significantly impact real-time performance consistency. ARM processors implement tightly-coupled memory and cache locking mechanisms to guarantee predictable memory access times. Robotic control algorithms require consistent memory performance to maintain stable control loops, particularly in applications involving precise motor control or sensor fusion where timing variations can compromise system stability.
Task scheduling and context switching overhead directly influence multi-threaded robotic applications. ARM processors must complete context switches within 5-20 microseconds to support concurrent execution of multiple robotic subsystems. Real-time operating systems optimized for ARM architecture implement priority-based scheduling algorithms that ensure time-critical robotic tasks receive adequate processor resources while maintaining overall system responsiveness.
Power consumption constraints intersect with performance requirements in mobile robotic platforms. ARM's dynamic voltage and frequency scaling capabilities must balance computational performance with energy efficiency while maintaining real-time guarantees. Battery-powered robots require ARM processors to deliver consistent performance across varying power states without compromising temporal constraints essential for safe autonomous operation.
Power Efficiency Optimization in ARM Robot Design
Power efficiency optimization represents a critical design consideration in ARM-based robotic systems, where the balance between computational performance and energy consumption directly impacts operational autonomy and system sustainability. ARM processors inherently offer superior power-to-performance ratios compared to traditional x86 architectures, making them particularly suitable for mobile and autonomous robotic applications where battery life and thermal management are paramount concerns.
The fundamental approach to power efficiency in ARM robot design centers on dynamic voltage and frequency scaling (DVFS) techniques, which allow processors to adjust their operating parameters based on real-time computational demands. Modern ARM Cortex-A series processors implement sophisticated power management units that can selectively activate or deactivate processor cores, enabling fine-grained control over energy consumption during varying operational phases of robotic tasks.
Heterogeneous computing architectures, exemplified by ARM's big.LITTLE configuration, provide significant opportunities for power optimization in robotic systems. By intelligently distributing computational workloads between high-performance and energy-efficient cores, robotic systems can maintain responsive real-time control while minimizing power consumption during routine operations such as sensor monitoring and basic navigation tasks.
Advanced power gating strategies enable selective shutdown of unused functional units within ARM processors, including floating-point units, NEON SIMD engines, and specialized coprocessors when not required for current robotic operations. This granular power management approach can achieve power savings of 20-40% in typical robotic applications with intermittent high-performance computing requirements.
Thermal-aware scheduling algorithms specifically designed for ARM-based robotic systems incorporate temperature feedback to prevent thermal throttling while maintaining optimal performance levels. These algorithms consider both ambient operating conditions and internal heat generation patterns typical in robotic applications, ensuring sustained operation without performance degradation.
Memory subsystem optimization plays a crucial role in overall power efficiency, with ARM's cache hierarchy and memory controller configurations directly impacting energy consumption. Implementing intelligent data prefetching and cache management strategies tailored to robotic workload patterns can reduce memory access latency while minimizing power overhead associated with frequent data transfers.
Integration of specialized low-power accelerators and coprocessors alongside ARM cores enables offloading of specific robotic functions such as sensor fusion, computer vision preprocessing, and motor control algorithms to dedicated hardware blocks operating at significantly lower power levels than general-purpose processors.
The fundamental approach to power efficiency in ARM robot design centers on dynamic voltage and frequency scaling (DVFS) techniques, which allow processors to adjust their operating parameters based on real-time computational demands. Modern ARM Cortex-A series processors implement sophisticated power management units that can selectively activate or deactivate processor cores, enabling fine-grained control over energy consumption during varying operational phases of robotic tasks.
Heterogeneous computing architectures, exemplified by ARM's big.LITTLE configuration, provide significant opportunities for power optimization in robotic systems. By intelligently distributing computational workloads between high-performance and energy-efficient cores, robotic systems can maintain responsive real-time control while minimizing power consumption during routine operations such as sensor monitoring and basic navigation tasks.
Advanced power gating strategies enable selective shutdown of unused functional units within ARM processors, including floating-point units, NEON SIMD engines, and specialized coprocessors when not required for current robotic operations. This granular power management approach can achieve power savings of 20-40% in typical robotic applications with intermittent high-performance computing requirements.
Thermal-aware scheduling algorithms specifically designed for ARM-based robotic systems incorporate temperature feedback to prevent thermal throttling while maintaining optimal performance levels. These algorithms consider both ambient operating conditions and internal heat generation patterns typical in robotic applications, ensuring sustained operation without performance degradation.
Memory subsystem optimization plays a crucial role in overall power efficiency, with ARM's cache hierarchy and memory controller configurations directly impacting energy consumption. Implementing intelligent data prefetching and cache management strategies tailored to robotic workload patterns can reduce memory access latency while minimizing power overhead associated with frequent data transfers.
Integration of specialized low-power accelerators and coprocessors alongside ARM cores enables offloading of specific robotic functions such as sensor fusion, computer vision preprocessing, and motor control algorithms to dedicated hardware blocks operating at significantly lower power levels than general-purpose processors.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!