

How Model Predictive Control Enhances Robotics Performance
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
MPC in Robotics: Background and Objectives
Model Predictive Control (MPC) has emerged as a transformative control methodology in robotics over the past three decades. Originally developed for process industries in the 1970s, MPC has evolved significantly with advancements in computational capabilities, making it increasingly viable for real-time robotic applications that demand high performance and precision.
The fundamental principle of MPC involves predicting system behavior over a finite time horizon and optimizing control actions accordingly. This approach represents a paradigm shift from traditional PID controllers that dominated robotics control systems for decades. While PID controllers react to errors after they occur, MPC anticipates future states and proactively adjusts control signals to optimize performance.
Recent technological developments have accelerated MPC adoption in robotics. The exponential growth in computing power has enabled complex optimization calculations to be performed within the strict timing constraints of robotic control loops. Additionally, advances in mathematical optimization techniques have improved the efficiency of MPC algorithms, making them suitable for systems with fast dynamics.
The robotics industry faces increasing demands for precision, adaptability, and autonomy across diverse applications including manufacturing, healthcare, logistics, and exploration. Traditional control methods often struggle with multi-variable constraints, nonlinear dynamics, and time-varying objectives that characterize modern robotic systems. MPC addresses these challenges through its predictive nature and ability to handle constraints explicitly.
Current research trends indicate a convergence of MPC with machine learning techniques, particularly reinforcement learning, to enhance model accuracy and adaptability. This hybrid approach aims to combine the theoretical guarantees of MPC with the data-driven adaptability of learning algorithms, potentially revolutionizing how robots interact with uncertain environments.
The primary technical objectives for MPC in robotics include reducing computational complexity for real-time implementation, improving robustness against model uncertainties, enhancing adaptability to changing environments, and developing standardized frameworks that simplify deployment across different robotic platforms.
Industry adoption metrics show accelerating implementation of MPC in high-value robotics applications, with a compound annual growth rate of approximately 25% since 2018. This trend is particularly pronounced in collaborative robotics, autonomous navigation systems, and precision manipulation tasks where the benefits of predictive control translate directly to performance improvements.
Looking forward, the evolution of MPC in robotics is expected to focus on distributed implementations for multi-robot systems, integration with sensor fusion algorithms for improved state estimation, and development of specialized hardware accelerators that can further reduce computational latency.
The fundamental principle of MPC involves predicting system behavior over a finite time horizon and optimizing control actions accordingly. This approach represents a paradigm shift from traditional PID controllers that dominated robotics control systems for decades. While PID controllers react to errors after they occur, MPC anticipates future states and proactively adjusts control signals to optimize performance.
Recent technological developments have accelerated MPC adoption in robotics. The exponential growth in computing power has enabled complex optimization calculations to be performed within the strict timing constraints of robotic control loops. Additionally, advances in mathematical optimization techniques have improved the efficiency of MPC algorithms, making them suitable for systems with fast dynamics.
The robotics industry faces increasing demands for precision, adaptability, and autonomy across diverse applications including manufacturing, healthcare, logistics, and exploration. Traditional control methods often struggle with multi-variable constraints, nonlinear dynamics, and time-varying objectives that characterize modern robotic systems. MPC addresses these challenges through its predictive nature and ability to handle constraints explicitly.
Current research trends indicate a convergence of MPC with machine learning techniques, particularly reinforcement learning, to enhance model accuracy and adaptability. This hybrid approach aims to combine the theoretical guarantees of MPC with the data-driven adaptability of learning algorithms, potentially revolutionizing how robots interact with uncertain environments.
The primary technical objectives for MPC in robotics include reducing computational complexity for real-time implementation, improving robustness against model uncertainties, enhancing adaptability to changing environments, and developing standardized frameworks that simplify deployment across different robotic platforms.
Industry adoption metrics show accelerating implementation of MPC in high-value robotics applications, with a compound annual growth rate of approximately 25% since 2018. This trend is particularly pronounced in collaborative robotics, autonomous navigation systems, and precision manipulation tasks where the benefits of predictive control translate directly to performance improvements.
Looking forward, the evolution of MPC in robotics is expected to focus on distributed implementations for multi-robot systems, integration with sensor fusion algorithms for improved state estimation, and development of specialized hardware accelerators that can further reduce computational latency.
Market Analysis for MPC-Enhanced Robotic Systems
The global market for MPC-enhanced robotic systems is experiencing significant growth, driven by increasing demand for high-precision automation across multiple industries. Current market valuations indicate that the industrial robotics sector implementing advanced control systems reached approximately $50 billion in 2022, with MPC-specific implementations accounting for roughly 15% of this market. This segment is projected to grow at a compound annual growth rate of 18% through 2028, outpacing the broader robotics market's 12% growth rate.
Manufacturing remains the dominant application sector, representing 42% of the total market for MPC-enhanced robotics. Within this sector, automotive manufacturing leads adoption with approximately 35% market share, followed by electronics manufacturing at 28% and pharmaceutical production at 15%. The remaining 22% is distributed across various manufacturing applications including food processing, textiles, and consumer goods.
Healthcare applications represent the fastest-growing segment for MPC-enhanced robotics, with a 24% annual growth rate. Surgical robotics implementing predictive control algorithms has seen particularly strong demand, with market penetration increasing from 8% in 2020 to 17% in 2023. This rapid adoption is primarily driven by improved patient outcomes and reduced recovery times associated with the enhanced precision of MPC-guided surgical procedures.
Geographically, North America currently leads the market with 38% share, followed by Europe (29%) and Asia-Pacific (27%). However, the Asia-Pacific region is demonstrating the highest growth trajectory at 22% annually, fueled by rapid industrial automation initiatives in China, South Korea, and Japan. Emerging markets in Latin America and Africa collectively represent only 6% of the current market but are showing promising growth potential as manufacturing capabilities expand in these regions.
Key customer segments include large-scale industrial manufacturers (55% of market revenue), healthcare institutions (22%), research facilities (13%), and small to medium enterprises (10%). The adoption curve varies significantly across these segments, with large enterprises typically leading implementation due to higher capital expenditure capabilities and established technical infrastructure.
Market barriers include high initial implementation costs, with average MPC system integration adding 30-40% to standard robotic system costs. Technical complexity represents another significant barrier, with specialized expertise required for effective deployment and maintenance. However, the return on investment typically materializes within 18-24 months through improved productivity, reduced error rates, and lower operational costs.
Manufacturing remains the dominant application sector, representing 42% of the total market for MPC-enhanced robotics. Within this sector, automotive manufacturing leads adoption with approximately 35% market share, followed by electronics manufacturing at 28% and pharmaceutical production at 15%. The remaining 22% is distributed across various manufacturing applications including food processing, textiles, and consumer goods.
Healthcare applications represent the fastest-growing segment for MPC-enhanced robotics, with a 24% annual growth rate. Surgical robotics implementing predictive control algorithms has seen particularly strong demand, with market penetration increasing from 8% in 2020 to 17% in 2023. This rapid adoption is primarily driven by improved patient outcomes and reduced recovery times associated with the enhanced precision of MPC-guided surgical procedures.
Geographically, North America currently leads the market with 38% share, followed by Europe (29%) and Asia-Pacific (27%). However, the Asia-Pacific region is demonstrating the highest growth trajectory at 22% annually, fueled by rapid industrial automation initiatives in China, South Korea, and Japan. Emerging markets in Latin America and Africa collectively represent only 6% of the current market but are showing promising growth potential as manufacturing capabilities expand in these regions.
Key customer segments include large-scale industrial manufacturers (55% of market revenue), healthcare institutions (22%), research facilities (13%), and small to medium enterprises (10%). The adoption curve varies significantly across these segments, with large enterprises typically leading implementation due to higher capital expenditure capabilities and established technical infrastructure.
Market barriers include high initial implementation costs, with average MPC system integration adding 30-40% to standard robotic system costs. Technical complexity represents another significant barrier, with specialized expertise required for effective deployment and maintenance. However, the return on investment typically materializes within 18-24 months through improved productivity, reduced error rates, and lower operational costs.
Current MPC Implementation Challenges in Robotics
Despite the promising potential of Model Predictive Control (MPC) in robotics, several significant implementation challenges currently limit its widespread adoption. The computational burden remains one of the most pressing issues, as MPC algorithms require solving complex optimization problems in real-time. For high-dimensional robotic systems with multiple degrees of freedom, these computations can exceed the capabilities of onboard processors, especially when operating under strict timing constraints of 1-10 milliseconds typical in dynamic robotic applications.
Model accuracy presents another fundamental challenge. MPC performance directly depends on the quality of the system model, yet developing precise dynamic models for complex robotic systems remains difficult. Unmodeled dynamics, parameter uncertainties, and environmental interactions create discrepancies between predicted and actual behavior. This is particularly problematic in contact-rich tasks where contact dynamics are notoriously difficult to model accurately.
Robustness issues further complicate MPC implementation. Real-world disturbances, sensor noise, and model mismatches can significantly degrade controller performance. While robust MPC variants exist, they often introduce additional computational complexity or conservatism that may compromise performance objectives.
The stability-feasibility tradeoff represents another significant challenge. Ensuring recursive feasibility (guaranteeing that the optimization problem remains solvable at each time step) while maintaining stability can be mathematically complex, especially for nonlinear systems with constraints. This often necessitates careful tuning of prediction horizons, cost functions, and constraint formulations.
From an implementation perspective, the expertise barrier remains substantial. Deploying MPC requires interdisciplinary knowledge spanning optimization theory, control engineering, and software implementation. The lack of standardized, user-friendly tools for MPC design and deployment in robotics applications creates significant entry barriers for many robotics developers.
Hardware limitations also constrain MPC adoption. Many robotic platforms, particularly smaller or cost-sensitive systems, lack the computational resources required for real-time MPC implementation. This creates a technological gap where theoretically superior control approaches cannot be practically deployed.
The tuning complexity of MPC controllers presents additional challenges. The performance of MPC depends on numerous parameters including prediction horizon length, weighting matrices, and constraint formulations. Finding optimal parameter combinations often requires extensive experimentation and domain expertise, making the deployment process time-consuming and potentially costly.
Finally, the integration challenge with existing robotic software architectures cannot be overlooked. Many robotic systems use established frameworks like ROS (Robot Operating System) that may not seamlessly accommodate the computational workflow of MPC algorithms, requiring additional engineering effort for effective integration.
Model accuracy presents another fundamental challenge. MPC performance directly depends on the quality of the system model, yet developing precise dynamic models for complex robotic systems remains difficult. Unmodeled dynamics, parameter uncertainties, and environmental interactions create discrepancies between predicted and actual behavior. This is particularly problematic in contact-rich tasks where contact dynamics are notoriously difficult to model accurately.
Robustness issues further complicate MPC implementation. Real-world disturbances, sensor noise, and model mismatches can significantly degrade controller performance. While robust MPC variants exist, they often introduce additional computational complexity or conservatism that may compromise performance objectives.
The stability-feasibility tradeoff represents another significant challenge. Ensuring recursive feasibility (guaranteeing that the optimization problem remains solvable at each time step) while maintaining stability can be mathematically complex, especially for nonlinear systems with constraints. This often necessitates careful tuning of prediction horizons, cost functions, and constraint formulations.
From an implementation perspective, the expertise barrier remains substantial. Deploying MPC requires interdisciplinary knowledge spanning optimization theory, control engineering, and software implementation. The lack of standardized, user-friendly tools for MPC design and deployment in robotics applications creates significant entry barriers for many robotics developers.
Hardware limitations also constrain MPC adoption. Many robotic platforms, particularly smaller or cost-sensitive systems, lack the computational resources required for real-time MPC implementation. This creates a technological gap where theoretically superior control approaches cannot be practically deployed.
The tuning complexity of MPC controllers presents additional challenges. The performance of MPC depends on numerous parameters including prediction horizon length, weighting matrices, and constraint formulations. Finding optimal parameter combinations often requires extensive experimentation and domain expertise, making the deployment process time-consuming and potentially costly.
Finally, the integration challenge with existing robotic software architectures cannot be overlooked. Many robotic systems use established frameworks like ROS (Robot Operating System) that may not seamlessly accommodate the computational workflow of MPC algorithms, requiring additional engineering effort for effective integration.
State-of-the-Art MPC Solutions for Robotic Applications
01 MPC Performance Optimization Techniques
Various techniques can be employed to optimize the performance of Model Predictive Control systems. These include advanced algorithm development, computational efficiency improvements, and optimization of control parameters. By implementing these techniques, MPC systems can achieve better control accuracy, faster response times, and improved overall performance in industrial applications.- MPC performance optimization techniques: Various techniques can be employed to optimize the performance of Model Predictive Control systems. These include advanced algorithms for constraint handling, computational efficiency improvements, and optimization of control parameters. By implementing these optimization techniques, MPC systems can achieve better control accuracy, faster response times, and improved overall performance in industrial applications.
- MPC implementation in industrial processes: Model Predictive Control can be effectively implemented in various industrial processes to enhance control performance. These implementations involve adapting MPC algorithms to specific industrial requirements, integrating with existing control systems, and addressing industry-specific challenges. The application of MPC in industrial settings has demonstrated significant improvements in process efficiency, product quality, and operational stability.
- Performance evaluation and monitoring of MPC systems: Continuous evaluation and monitoring of MPC systems are essential for maintaining optimal performance. This involves developing performance metrics, implementing diagnostic tools, and establishing monitoring frameworks to assess control quality. By regularly evaluating MPC performance, operators can identify potential issues, make necessary adjustments, and ensure that the control system continues to meet operational requirements.
- MPC integration with other control technologies: The integration of Model Predictive Control with other control technologies can significantly enhance overall system performance. This includes combining MPC with artificial intelligence, machine learning algorithms, and traditional control methods to create hybrid control systems. Such integrations leverage the strengths of each technology to overcome individual limitations and achieve superior control performance across various operating conditions.
- Adaptive and robust MPC strategies: Adaptive and robust MPC strategies are designed to maintain high performance despite uncertainties, disturbances, and changing process conditions. These strategies incorporate techniques for model adaptation, disturbance rejection, and robustness against parameter variations. By implementing adaptive and robust approaches, MPC systems can deliver consistent performance across a wide range of operating conditions and maintain stability in the presence of uncertainties.
02 MPC Implementation in Industrial Processes
Model Predictive Control can be effectively implemented in various industrial processes to enhance control performance. This includes applications in manufacturing, chemical processing, and energy systems. The implementation involves system modeling, controller design, and integration with existing control infrastructure to achieve improved process efficiency and product quality.Expand Specific Solutions03 Predictive Modeling and Simulation for MPC
Developing accurate predictive models and simulation frameworks is crucial for MPC performance. These models capture the dynamic behavior of the controlled system and enable the controller to predict future states. Advanced simulation techniques allow for testing and validation of MPC strategies before deployment, ensuring optimal control performance in real-world applications.Expand Specific Solutions04 MPC Performance Monitoring and Adaptation
Continuous monitoring and adaptation mechanisms are essential for maintaining MPC performance over time. These systems track control performance metrics, detect deviations from optimal operation, and automatically adjust control parameters. Adaptive MPC frameworks can respond to changing process conditions, disturbances, and system degradation to maintain consistent control quality.Expand Specific Solutions05 Energy Efficiency and Sustainability in MPC Applications
Model Predictive Control can significantly contribute to energy efficiency and sustainability goals in various applications. By optimizing control actions with consideration for energy consumption, MPC systems can reduce operational costs and environmental impact. These applications include building climate control, renewable energy integration, and resource-efficient manufacturing processes.Expand Specific Solutions
Leading Companies and Research Institutions in MPC Robotics
Model Predictive Control (MPC) in robotics is currently in a growth phase, with the market expanding rapidly due to increasing automation demands across industries. The global market size for MPC in robotics is projected to reach significant scale as industrial automation continues to evolve. Technologically, MPC implementation is maturing with companies like NVIDIA, Toyota Research Institute, and Google leading innovation through advanced computing platforms and AI integration. FANUC, ABB Group, and Mitsubishi Electric are leveraging MPC to enhance precision in industrial robotics, while automotive players like Toyota and Nissan are implementing it for autonomous systems. OMRON and Bosch are advancing MPC applications in factory automation, demonstrating the technology's cross-sector relevance and growing commercial viability.
NVIDIA Corp.
Technical Solution: NVIDIA has developed a comprehensive hardware-software ecosystem that accelerates Model Predictive Control for robotics applications. Their Isaac robotics platform incorporates GPU-accelerated MPC solvers that can compute optimal control actions in milliseconds, enabling real-time implementation of complex predictive models. NVIDIA's approach leverages parallel computing capabilities to solve the optimization problems inherent in MPC at speeds 10-100x faster than traditional CPU implementations. Their Jetson embedded computing platforms provide the computational power necessary for edge deployment of MPC algorithms in autonomous robots. NVIDIA has also pioneered the integration of MPC with deep learning, creating hybrid controllers that combine the predictive capabilities of MPC with learned dynamics models[4]. This approach allows robots to adapt to changing conditions while maintaining the safety guarantees of traditional MPC. Their Isaac Sim simulation environment enables rapid prototyping and testing of MPC strategies before deployment on physical robots, significantly accelerating development cycles and improving robustness.
Strengths: Unparalleled computational performance for complex MPC implementations; strong ecosystem of development tools; excellent integration with machine learning workflows. Weaknesses: Higher power consumption compared to specialized control hardware; requires expertise in NVIDIA's CUDA programming model; potential vendor lock-in for comprehensive solutions.
Robert Bosch GmbH
Technical Solution: Bosch has implemented advanced Model Predictive Control solutions across their robotics portfolio, with particular emphasis on mobile robotics and collaborative manufacturing applications. Their APAS (Automated Production Assistant) robot series utilizes MPC for safe human-robot collaboration, with the controller continuously predicting potential interaction scenarios and adjusting robot behavior accordingly. Bosch's implementation combines classical MPC formulations with safety-critical constraints that guarantee collision avoidance while optimizing task performance. Their approach incorporates online system identification to adapt the predictive model in real-time, improving control performance as the robot operates in changing environments. Bosch has also developed distributed MPC architectures for multi-robot coordination in warehouse and manufacturing settings, where individual robot controllers communicate to optimize collective behavior[5]. Their latest generation of controllers implements economic MPC that balances performance objectives with energy efficiency, resulting in reported energy savings of up to 25% compared to traditional control approaches while maintaining comparable task execution times.
Strengths: Exceptional focus on safety-critical applications; robust implementation suitable for industrial environments; strong integration with broader automation systems. Weaknesses: More conservative performance compared to pure performance-oriented solutions; higher initial engineering effort required for deployment; complexity in maintaining and updating the control systems.
Key Algorithms and Frameworks for Robotic MPC
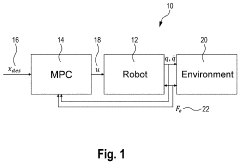
Robot Control Using Model-Predictive Interaction
PatentInactiveUS20210138652A1
Innovation
- The method integrates interaction dynamics into model predictive control, allowing for the consideration of forces that arise during human-robot interaction, enabling a unified approach for yield, force, and motion control through an optimization problem that weights interaction forces and adapts to different applications.
Systems and methods for updating the parameters of a model predictive controller with learned operational and vehicle parameters generated using simulations and machine learning
PatentPendingUS20220242441A1
Innovation
- The use of learned operational parameters, determined through machine learning and simulation, allows the model predictive controller to dynamically update vehicle and external parameters, such as tire friction and road conditions, to optimize path tracking and collision avoidance maneuvers.




Real-time Computing Requirements for MPC Implementation
The implementation of Model Predictive Control (MPC) in robotics systems demands substantial computational resources due to its iterative optimization nature. Modern MPC algorithms typically require solving complex optimization problems within strict time constraints, often in milliseconds, to maintain effective real-time control of robotic systems. This computational intensity necessitates careful hardware selection and software optimization to meet these demanding requirements.
High-performance computing platforms are essential for MPC implementation. Industrial robotic applications commonly utilize dedicated processors such as Digital Signal Processors (DSPs), Field-Programmable Gate Arrays (FPGAs), or Application-Specific Integrated Circuits (ASICs). These specialized hardware solutions offer deterministic computation times critical for real-time control. For more complex robotic systems, multi-core processors or GPU acceleration may be necessary to parallelize the optimization calculations.
Memory requirements also present significant challenges for MPC implementation. The controller must store system models, constraints, and optimization variables, with memory access speeds directly impacting computational performance. Fast cache memory and efficient memory management strategies are crucial for minimizing latency in the control loop, particularly for systems with high sampling rates.
Software architecture plays an equally important role in meeting real-time requirements. Efficient implementation of numerical algorithms for solving quadratic programming problems is fundamental to MPC performance. Recent advances include explicit MPC formulations that pre-compute solutions offline, warm-starting techniques that leverage previous solutions, and approximation methods that trade optimal performance for computational efficiency.
Real-time operating systems (RTOS) provide the deterministic scheduling necessary for MPC implementation. These systems ensure that control calculations complete within specified time intervals, maintaining the stability and performance of the robotic system. Popular RTOS options in robotics include QNX, VxWorks, and real-time variants of Linux, which offer predictable task execution essential for control applications.
Communication bandwidth and latency between sensors, the MPC controller, and actuators represent another critical factor. High-speed communication protocols such as EtherCAT or PROFINET are often employed to minimize delays in the control loop. For distributed robotic systems, network reliability and determinism become paramount to ensure consistent control performance across multiple interconnected components.
High-performance computing platforms are essential for MPC implementation. Industrial robotic applications commonly utilize dedicated processors such as Digital Signal Processors (DSPs), Field-Programmable Gate Arrays (FPGAs), or Application-Specific Integrated Circuits (ASICs). These specialized hardware solutions offer deterministic computation times critical for real-time control. For more complex robotic systems, multi-core processors or GPU acceleration may be necessary to parallelize the optimization calculations.
Memory requirements also present significant challenges for MPC implementation. The controller must store system models, constraints, and optimization variables, with memory access speeds directly impacting computational performance. Fast cache memory and efficient memory management strategies are crucial for minimizing latency in the control loop, particularly for systems with high sampling rates.
Software architecture plays an equally important role in meeting real-time requirements. Efficient implementation of numerical algorithms for solving quadratic programming problems is fundamental to MPC performance. Recent advances include explicit MPC formulations that pre-compute solutions offline, warm-starting techniques that leverage previous solutions, and approximation methods that trade optimal performance for computational efficiency.
Real-time operating systems (RTOS) provide the deterministic scheduling necessary for MPC implementation. These systems ensure that control calculations complete within specified time intervals, maintaining the stability and performance of the robotic system. Popular RTOS options in robotics include QNX, VxWorks, and real-time variants of Linux, which offer predictable task execution essential for control applications.
Communication bandwidth and latency between sensors, the MPC controller, and actuators represent another critical factor. High-speed communication protocols such as EtherCAT or PROFINET are often employed to minimize delays in the control loop. For distributed robotic systems, network reliability and determinism become paramount to ensure consistent control performance across multiple interconnected components.
Safety and Reliability Considerations in MPC-Controlled Robots
Safety considerations in MPC-controlled robotic systems are paramount as these systems increasingly operate in human-collaborative environments. The inherent predictive nature of MPC offers significant advantages for enhancing safety through its ability to anticipate potential hazards and constraints violations before they occur. This proactive approach to safety management represents a fundamental shift from reactive safety mechanisms traditionally employed in robotics.
MPC frameworks incorporate explicit safety constraints within their optimization formulations, allowing robots to operate within predefined safety boundaries. These constraints can include collision avoidance parameters, velocity limitations, and force thresholds that prevent harmful interactions with humans or the environment. The mathematical formulation of these constraints ensures they are continuously respected throughout the prediction horizon, providing robust safety guarantees.
Reliability in MPC-controlled robots is significantly enhanced through the controller's ability to handle model uncertainties and disturbances. By continuously updating its internal model based on real-time feedback, MPC can adapt to changing conditions and maintain performance despite discrepancies between the theoretical model and actual system behavior. This adaptive capability is crucial for maintaining operational reliability in dynamic environments.
Fault tolerance represents another critical aspect of safety and reliability in MPC implementations. Advanced MPC frameworks incorporate fault detection and isolation mechanisms that can identify sensor failures, actuator malfunctions, or communication disruptions. Upon detection, the controller can reconfigure its strategy to maintain safe operation despite compromised system components, often through reduced-performance modes that prioritize safety over task completion.
Robustness against environmental uncertainties further strengthens the reliability profile of MPC-controlled robots. Techniques such as robust MPC and stochastic MPC explicitly account for uncertainties in the prediction model, ensuring stable performance even when faced with unexpected environmental conditions or modeling errors. This robustness is particularly valuable in unstructured environments where perfect modeling is impossible.
Certification and validation methodologies for MPC-based safety systems remain an active research area. Current approaches combine formal verification methods with extensive simulation and physical testing to establish safety guarantees. These methodologies aim to provide mathematical proofs that the MPC controller will maintain safety under all foreseeable operating conditions, a crucial requirement for deployment in safety-critical applications such as medical robotics or human-collaborative industrial settings.
Human-robot interaction safety presents unique challenges that MPC is particularly well-suited to address. By predicting human movements and intentions within its optimization framework, MPC can generate robot trajectories that maintain appropriate safety distances while appearing natural and non-threatening to human collaborators. This predictive capability enables more fluid and safe human-robot collaboration than traditional reactive safety systems.
MPC frameworks incorporate explicit safety constraints within their optimization formulations, allowing robots to operate within predefined safety boundaries. These constraints can include collision avoidance parameters, velocity limitations, and force thresholds that prevent harmful interactions with humans or the environment. The mathematical formulation of these constraints ensures they are continuously respected throughout the prediction horizon, providing robust safety guarantees.
Reliability in MPC-controlled robots is significantly enhanced through the controller's ability to handle model uncertainties and disturbances. By continuously updating its internal model based on real-time feedback, MPC can adapt to changing conditions and maintain performance despite discrepancies between the theoretical model and actual system behavior. This adaptive capability is crucial for maintaining operational reliability in dynamic environments.
Fault tolerance represents another critical aspect of safety and reliability in MPC implementations. Advanced MPC frameworks incorporate fault detection and isolation mechanisms that can identify sensor failures, actuator malfunctions, or communication disruptions. Upon detection, the controller can reconfigure its strategy to maintain safe operation despite compromised system components, often through reduced-performance modes that prioritize safety over task completion.
Robustness against environmental uncertainties further strengthens the reliability profile of MPC-controlled robots. Techniques such as robust MPC and stochastic MPC explicitly account for uncertainties in the prediction model, ensuring stable performance even when faced with unexpected environmental conditions or modeling errors. This robustness is particularly valuable in unstructured environments where perfect modeling is impossible.
Certification and validation methodologies for MPC-based safety systems remain an active research area. Current approaches combine formal verification methods with extensive simulation and physical testing to establish safety guarantees. These methodologies aim to provide mathematical proofs that the MPC controller will maintain safety under all foreseeable operating conditions, a crucial requirement for deployment in safety-critical applications such as medical robotics or human-collaborative industrial settings.
Human-robot interaction safety presents unique challenges that MPC is particularly well-suited to address. By predicting human movements and intentions within its optimization framework, MPC can generate robot trajectories that maintain appropriate safety distances while appearing natural and non-threatening to human collaborators. This predictive capability enables more fluid and safe human-robot collaboration than traditional reactive safety systems.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!