

Visual Servoing vs Automated Vision Inspection: Workflow Insights
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing and AVI Technology Background and Goals
Visual servoing and Automated Vision Inspection (AVI) represent two fundamental paradigms in computer vision applications, each addressing distinct industrial automation challenges through sophisticated image processing and control methodologies. These technologies have evolved from early machine vision concepts developed in the 1970s and 1980s, when researchers first explored the integration of visual feedback systems with robotic control mechanisms.
Visual servoing emerged as a control strategy that utilizes real-time visual information to guide robotic manipulators and automated systems toward desired positions or trajectories. The technology fundamentally relies on extracting geometric features from camera images and converting them into control signals that drive actuators. This approach enables robots to perform precise positioning tasks, object tracking, and dynamic path correction based on continuous visual feedback loops.
Automated Vision Inspection, conversely, focuses on quality control and defect detection applications within manufacturing environments. AVI systems employ advanced image analysis algorithms to identify product anomalies, dimensional variations, surface defects, and assembly errors with high accuracy and repeatability. These systems have become indispensable in industries requiring stringent quality standards, such as automotive, electronics, pharmaceuticals, and food processing.
The technological evolution of both domains has been driven by advances in digital imaging sensors, computational processing power, and machine learning algorithms. Modern implementations leverage high-resolution cameras, specialized lighting systems, and sophisticated software frameworks capable of processing complex visual data in real-time industrial environments.
The primary objective of integrating visual servoing and AVI technologies centers on creating comprehensive automation solutions that combine precise motion control with intelligent quality assessment capabilities. This convergence aims to establish seamless workflows where robotic systems can simultaneously perform manipulation tasks while conducting inline inspection processes, thereby optimizing production efficiency and maintaining consistent quality standards.
Contemporary research focuses on developing unified platforms that can dynamically switch between servoing and inspection modes, enabling flexible manufacturing systems capable of adapting to varying product specifications and quality requirements. The ultimate goal involves creating intelligent vision-guided automation systems that can learn from inspection feedback to improve subsequent servoing operations, establishing a closed-loop optimization cycle for enhanced manufacturing performance.
Visual servoing emerged as a control strategy that utilizes real-time visual information to guide robotic manipulators and automated systems toward desired positions or trajectories. The technology fundamentally relies on extracting geometric features from camera images and converting them into control signals that drive actuators. This approach enables robots to perform precise positioning tasks, object tracking, and dynamic path correction based on continuous visual feedback loops.
Automated Vision Inspection, conversely, focuses on quality control and defect detection applications within manufacturing environments. AVI systems employ advanced image analysis algorithms to identify product anomalies, dimensional variations, surface defects, and assembly errors with high accuracy and repeatability. These systems have become indispensable in industries requiring stringent quality standards, such as automotive, electronics, pharmaceuticals, and food processing.
The technological evolution of both domains has been driven by advances in digital imaging sensors, computational processing power, and machine learning algorithms. Modern implementations leverage high-resolution cameras, specialized lighting systems, and sophisticated software frameworks capable of processing complex visual data in real-time industrial environments.
The primary objective of integrating visual servoing and AVI technologies centers on creating comprehensive automation solutions that combine precise motion control with intelligent quality assessment capabilities. This convergence aims to establish seamless workflows where robotic systems can simultaneously perform manipulation tasks while conducting inline inspection processes, thereby optimizing production efficiency and maintaining consistent quality standards.
Contemporary research focuses on developing unified platforms that can dynamically switch between servoing and inspection modes, enabling flexible manufacturing systems capable of adapting to varying product specifications and quality requirements. The ultimate goal involves creating intelligent vision-guided automation systems that can learn from inspection feedback to improve subsequent servoing operations, establishing a closed-loop optimization cycle for enhanced manufacturing performance.
Market Demand for Automated Vision Systems
The global automated vision systems market is experiencing unprecedented growth driven by the convergence of artificial intelligence, machine learning, and advanced imaging technologies. Manufacturing industries worldwide are increasingly adopting these systems to address critical challenges including quality control, production efficiency, and labor shortages. The automotive sector leads this adoption, utilizing automated vision inspection for defect detection in components and assemblies, while visual servoing enables precise robotic operations in assembly lines.
Electronics manufacturing represents another significant demand driver, where miniaturization trends require inspection capabilities beyond human visual acuity. Automated vision systems provide the precision necessary for detecting microscopic defects in semiconductor wafers, printed circuit boards, and electronic components. The pharmaceutical industry similarly relies on these technologies for packaging verification, label inspection, and contamination detection to ensure regulatory compliance and patient safety.
Food and beverage industries are rapidly integrating automated vision solutions to maintain quality standards while meeting increasing consumer demands for product consistency. These systems excel at detecting foreign objects, verifying packaging integrity, and ensuring proper labeling across high-speed production lines. The technology's ability to operate continuously without fatigue makes it particularly valuable in industries requiring round-the-clock operations.
The rise of Industry 4.0 initiatives has accelerated market demand as manufacturers seek to create smart factories with interconnected systems. Visual servoing technologies enable adaptive manufacturing processes where robots can adjust their operations based on real-time visual feedback, enhancing flexibility and reducing setup times for different product variants.
Emerging applications in logistics and warehousing are expanding market opportunities, with automated vision systems enabling efficient sorting, package inspection, and inventory management. E-commerce growth has intensified the need for automated solutions capable of handling diverse package types and sizes while maintaining accuracy and speed.
Regional demand patterns show strong growth in Asia-Pacific markets, particularly in China and Southeast Asia, where rapid industrialization and manufacturing expansion drive adoption. North American and European markets demonstrate mature demand focused on upgrading existing systems with advanced AI-powered capabilities and integration with existing manufacturing execution systems.
Electronics manufacturing represents another significant demand driver, where miniaturization trends require inspection capabilities beyond human visual acuity. Automated vision systems provide the precision necessary for detecting microscopic defects in semiconductor wafers, printed circuit boards, and electronic components. The pharmaceutical industry similarly relies on these technologies for packaging verification, label inspection, and contamination detection to ensure regulatory compliance and patient safety.
Food and beverage industries are rapidly integrating automated vision solutions to maintain quality standards while meeting increasing consumer demands for product consistency. These systems excel at detecting foreign objects, verifying packaging integrity, and ensuring proper labeling across high-speed production lines. The technology's ability to operate continuously without fatigue makes it particularly valuable in industries requiring round-the-clock operations.
The rise of Industry 4.0 initiatives has accelerated market demand as manufacturers seek to create smart factories with interconnected systems. Visual servoing technologies enable adaptive manufacturing processes where robots can adjust their operations based on real-time visual feedback, enhancing flexibility and reducing setup times for different product variants.
Emerging applications in logistics and warehousing are expanding market opportunities, with automated vision systems enabling efficient sorting, package inspection, and inventory management. E-commerce growth has intensified the need for automated solutions capable of handling diverse package types and sizes while maintaining accuracy and speed.
Regional demand patterns show strong growth in Asia-Pacific markets, particularly in China and Southeast Asia, where rapid industrialization and manufacturing expansion drive adoption. North American and European markets demonstrate mature demand focused on upgrading existing systems with advanced AI-powered capabilities and integration with existing manufacturing execution systems.
Current State of Visual Servoing vs AVI Technologies
Visual servoing technology has reached significant maturity in industrial automation, with real-time feedback control systems achieving sub-millimeter precision in manufacturing applications. Current implementations primarily utilize eye-in-hand and eye-to-hand configurations, where cameras mounted on robotic end-effectors or fixed positions provide continuous visual feedback for dynamic positioning tasks. Leading platforms integrate advanced image processing algorithms with control systems operating at frequencies exceeding 100Hz, enabling responsive adaptation to environmental variations and target movements.
Automated Vision Inspection systems have evolved into sophisticated quality control solutions, leveraging deep learning algorithms and high-resolution imaging technologies. Contemporary AVI platforms incorporate multi-spectral imaging, 3D reconstruction capabilities, and artificial intelligence-driven defect detection algorithms achieving accuracy rates above 99.5% in controlled manufacturing environments. These systems process thousands of components per hour while maintaining consistent inspection standards across diverse product lines.
The technological landscape reveals distinct optimization paths for each domain. Visual servoing emphasizes real-time processing capabilities, robust tracking algorithms, and seamless integration with robotic control systems. Current challenges include handling occlusions, managing lighting variations, and maintaining stability during high-speed operations. Advanced implementations now incorporate predictive algorithms and machine learning techniques to anticipate target movements and compensate for system latencies.
AVI technologies focus on comprehensive defect detection, classification accuracy, and throughput optimization. Modern systems integrate multiple inspection modalities including surface analysis, dimensional measurement, and functional testing within unified platforms. Edge computing implementations enable distributed processing architectures, reducing latency and improving scalability across production lines.
Integration challenges persist between these technologies, particularly in applications requiring simultaneous inspection and manipulation tasks. Current hybrid solutions often operate sequentially rather than concurrently, limiting overall system efficiency. Emerging approaches explore unified vision architectures capable of supporting both servoing and inspection functions through shared computational resources and coordinated sensing strategies.
The technological maturity gap between visual servoing and AVI continues narrowing as both domains adopt similar underlying technologies including advanced sensors, machine learning frameworks, and high-performance computing platforms. This convergence creates opportunities for integrated solutions that leverage complementary strengths while addressing individual limitations through collaborative operational modes.
Automated Vision Inspection systems have evolved into sophisticated quality control solutions, leveraging deep learning algorithms and high-resolution imaging technologies. Contemporary AVI platforms incorporate multi-spectral imaging, 3D reconstruction capabilities, and artificial intelligence-driven defect detection algorithms achieving accuracy rates above 99.5% in controlled manufacturing environments. These systems process thousands of components per hour while maintaining consistent inspection standards across diverse product lines.
The technological landscape reveals distinct optimization paths for each domain. Visual servoing emphasizes real-time processing capabilities, robust tracking algorithms, and seamless integration with robotic control systems. Current challenges include handling occlusions, managing lighting variations, and maintaining stability during high-speed operations. Advanced implementations now incorporate predictive algorithms and machine learning techniques to anticipate target movements and compensate for system latencies.
AVI technologies focus on comprehensive defect detection, classification accuracy, and throughput optimization. Modern systems integrate multiple inspection modalities including surface analysis, dimensional measurement, and functional testing within unified platforms. Edge computing implementations enable distributed processing architectures, reducing latency and improving scalability across production lines.
Integration challenges persist between these technologies, particularly in applications requiring simultaneous inspection and manipulation tasks. Current hybrid solutions often operate sequentially rather than concurrently, limiting overall system efficiency. Emerging approaches explore unified vision architectures capable of supporting both servoing and inspection functions through shared computational resources and coordinated sensing strategies.
The technological maturity gap between visual servoing and AVI continues narrowing as both domains adopt similar underlying technologies including advanced sensors, machine learning frameworks, and high-performance computing platforms. This convergence creates opportunities for integrated solutions that leverage complementary strengths while addressing individual limitations through collaborative operational modes.
Existing Visual Servoing and AVI Solutions
01 Vision-based robotic control and positioning systems
Visual servoing techniques enable robots to use real-time visual feedback from cameras to control their motion and positioning. These systems process image data to calculate the position and orientation of objects or targets, then adjust robot movements accordingly. The visual feedback loop allows for precise manipulation and tracking of objects in dynamic environments, improving accuracy and adaptability in automated tasks.- Vision-based robotic control systems: Visual servoing systems integrate camera feedback with robotic control to enable real-time position adjustment and trajectory tracking. These systems use image processing algorithms to extract visual features from the workspace and compute control commands that guide robotic manipulators to desired positions. The closed-loop control architecture allows robots to adapt to dynamic environments and compensate for positioning errors through continuous visual feedback.
- Automated defect detection and quality inspection: Automated vision inspection workflows employ machine vision systems to detect defects, measure dimensions, and verify product quality in manufacturing processes. These systems capture images of products or components, apply image processing techniques to identify anomalies, and classify items based on predefined quality criteria. The automation reduces human error and increases inspection throughput while maintaining consistent quality standards.
- Multi-camera calibration and 3D reconstruction: Advanced vision systems utilize multiple cameras with calibration techniques to create three-dimensional representations of objects and scenes. Calibration procedures establish the geometric relationships between cameras and the workspace, enabling accurate depth perception and spatial measurements. These capabilities support applications requiring precise object localization and dimensional verification in complex inspection tasks.
- Deep learning-based vision analysis: Modern inspection workflows incorporate deep learning algorithms to enhance pattern recognition, object classification, and anomaly detection capabilities. Neural networks are trained on large datasets to identify complex visual patterns that traditional algorithms may miss. These intelligent systems can adapt to variations in lighting, orientation, and product appearance while improving accuracy over time through continuous learning.
- Real-time image processing and workflow optimization: High-speed vision inspection systems implement optimized image processing pipelines to achieve real-time performance in production environments. These workflows balance computational efficiency with accuracy through parallel processing, hardware acceleration, and algorithmic optimization. The systems integrate seamlessly with manufacturing execution systems to provide immediate feedback and enable rapid decision-making in automated production lines.
02 Automated defect detection and quality inspection
Automated vision inspection systems utilize image processing algorithms and machine learning to detect defects, anomalies, and quality issues in manufactured products. These systems capture images of products on production lines and analyze them against predefined quality standards. The inspection workflow includes image acquisition, preprocessing, feature extraction, and classification to identify non-conforming items, enabling real-time quality control without human intervention.Expand Specific Solutions03 3D vision and depth perception for inspection
Three-dimensional vision systems provide depth information and spatial measurements for comprehensive inspection tasks. These systems employ stereo vision, structured light, or time-of-flight technologies to create detailed 3D models of objects. The depth data enables measurement of dimensions, surface profiles, and volumetric properties, which is essential for inspecting complex geometries and ensuring dimensional accuracy in manufacturing processes.Expand Specific Solutions04 Machine vision workflow integration and calibration
Integration of vision systems into automated workflows requires proper calibration procedures and synchronization with other manufacturing equipment. Calibration methods establish the relationship between camera coordinates and real-world coordinates, ensuring accurate measurements. The workflow integration includes camera setup, lighting optimization, image acquisition timing, and communication protocols with control systems to create seamless automated inspection processes.Expand Specific Solutions05 AI-enhanced vision inspection and adaptive learning
Artificial intelligence and deep learning algorithms enhance vision inspection capabilities by enabling systems to learn from data and adapt to variations in products and conditions. These systems can recognize complex patterns, classify defects with high accuracy, and improve performance over time through continuous learning. Neural networks process visual data to make intelligent decisions about product quality, reducing false positives and handling diverse inspection scenarios.Expand Specific Solutions
Key Players in Vision-Guided Automation Industry
The visual servoing versus automated vision inspection landscape represents a mature industrial automation sector experiencing steady growth, with the market expanding as manufacturers increasingly adopt AI-driven quality control and robotic guidance systems. The industry demonstrates high technical maturity, evidenced by established players like Siemens AG and Hitachi Ltd. providing comprehensive automation solutions, while technology giants Google LLC and IBM contribute advanced AI and machine learning capabilities. Specialized companies such as Hangzhou Hikrobot focus specifically on machine vision applications, and semiconductor leaders like Samsung Electronics drive precision inspection technologies. Academic institutions including Zhejiang University and Southeast University contribute fundamental research, while automotive manufacturers like Ford and Boeing represent major end-user segments driving demand for both visual servoing in assembly operations and automated inspection for quality assurance across manufacturing processes.
Siemens AG
Technical Solution: Siemens has developed comprehensive visual servoing solutions integrated with their industrial automation platforms, featuring real-time image processing capabilities for robotic guidance and control. Their visual servoing systems utilize advanced camera-based feedback loops that enable precise positioning and tracking in manufacturing environments. The company's automated vision inspection systems incorporate machine learning algorithms for defect detection, quality control, and process optimization across various industrial applications. These systems seamlessly integrate with Siemens' digital factory ecosystem, providing end-to-end workflow management from visual data acquisition to automated decision-making processes.
Strengths: Strong industrial automation expertise, comprehensive ecosystem integration, robust real-time processing capabilities. Weaknesses: High implementation costs, complex system configuration requirements.
Google LLC
Technical Solution: Google has developed advanced computer vision technologies that support both visual servoing and automated inspection workflows through their TensorFlow and Cloud Vision APIs. Their visual servoing solutions leverage machine learning models for real-time object tracking and robotic control, enabling adaptive behavior in dynamic environments. The automated vision inspection capabilities utilize deep learning algorithms for anomaly detection, pattern recognition, and quality assessment across various industries. Google's cloud-based infrastructure provides scalable processing power for complex visual analysis tasks, while their edge computing solutions enable low-latency visual servoing applications in robotics and autonomous systems.
Strengths: Cutting-edge AI/ML capabilities, scalable cloud infrastructure, extensive research resources. Weaknesses: Limited industrial hardware integration, dependency on internet connectivity for cloud services.
Core Innovations in Vision-Based Control Systems
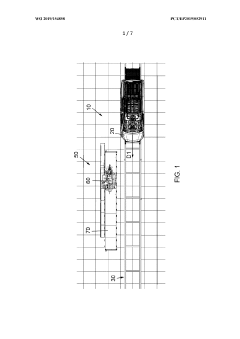
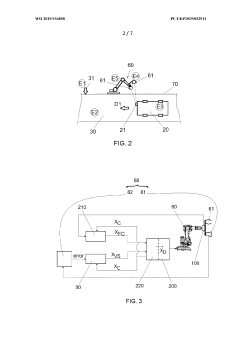
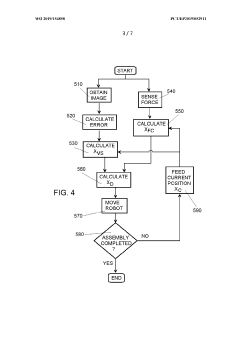
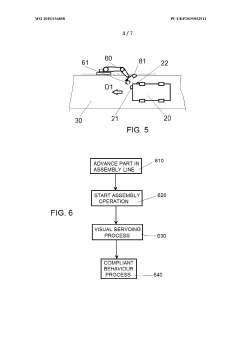
Assembling parts in an assembly line
PatentWO2019154858A1
Innovation
- A method utilizing a combination of real-time vision systems to monitor the position of Automated Guided Vehicles and target areas, enabling visual servoing and compliant behavior processes to synchronize the movement of industrial robots with the conveyor, allowing accurate and efficient assembly operations without stopping the conveyor and compensating for various sources of error.
Robot apparatus, control method, and storage medium
PatentPendingUS20250375890A1
Innovation
- A robot apparatus with an imaging unit and control unit that operates at multiple teaching points, allowing selection between operation modes for visual servoing and reference image acquisition, enabling automatic reference image acquisition where needed and efficient operation mode switching.




Industry Standards for Vision System Integration
The integration of vision systems in industrial environments requires adherence to comprehensive industry standards that ensure interoperability, safety, and performance consistency across different applications. These standards serve as the foundation for both visual servoing and automated vision inspection systems, establishing common protocols for hardware interfaces, communication methods, and quality assurance procedures.
International standards such as ISO 9001 for quality management systems and ISO 13849 for safety-related control systems provide the regulatory framework for vision system deployment. The Machine Vision Association (MVA) and European Machine Vision Association (EMVA) have developed specific guidelines for camera interfaces, lighting standards, and calibration procedures. These organizations promote standardized approaches to GenICam for camera control interfaces and GigE Vision for high-speed data transmission protocols.
Communication standards play a crucial role in vision system integration, with protocols like EtherNet/IP, PROFINET, and OPC-UA enabling seamless connectivity between vision components and manufacturing execution systems. The adoption of these standards ensures that visual servoing controllers can communicate effectively with robotic systems, while automated inspection systems can integrate smoothly with production line databases and quality management platforms.
Safety standards including IEC 61508 for functional safety and ISO 12100 for machinery safety establish mandatory requirements for vision system implementations in industrial environments. These standards define risk assessment procedures, fail-safe mechanisms, and emergency stop protocols that are essential for both real-time visual servoing applications and high-speed inspection workflows.
Calibration and measurement standards such as VDI/VDE 2634 for optical 3D measuring systems and ASTM E2544 for camera calibration provide methodologies for ensuring measurement accuracy and repeatability. These standards are particularly critical for applications requiring precise dimensional analysis and coordinate transformation between vision systems and robotic actuators.
The emergence of Industry 4.0 has introduced additional standardization requirements for data exchange formats, cybersecurity protocols, and cloud connectivity interfaces. Standards like OPC-UA for secure industrial communication and MTConnect for manufacturing data integration are becoming increasingly important for modern vision system deployments that require real-time data analytics and remote monitoring capabilities.
International standards such as ISO 9001 for quality management systems and ISO 13849 for safety-related control systems provide the regulatory framework for vision system deployment. The Machine Vision Association (MVA) and European Machine Vision Association (EMVA) have developed specific guidelines for camera interfaces, lighting standards, and calibration procedures. These organizations promote standardized approaches to GenICam for camera control interfaces and GigE Vision for high-speed data transmission protocols.
Communication standards play a crucial role in vision system integration, with protocols like EtherNet/IP, PROFINET, and OPC-UA enabling seamless connectivity between vision components and manufacturing execution systems. The adoption of these standards ensures that visual servoing controllers can communicate effectively with robotic systems, while automated inspection systems can integrate smoothly with production line databases and quality management platforms.
Safety standards including IEC 61508 for functional safety and ISO 12100 for machinery safety establish mandatory requirements for vision system implementations in industrial environments. These standards define risk assessment procedures, fail-safe mechanisms, and emergency stop protocols that are essential for both real-time visual servoing applications and high-speed inspection workflows.
Calibration and measurement standards such as VDI/VDE 2634 for optical 3D measuring systems and ASTM E2544 for camera calibration provide methodologies for ensuring measurement accuracy and repeatability. These standards are particularly critical for applications requiring precise dimensional analysis and coordinate transformation between vision systems and robotic actuators.
The emergence of Industry 4.0 has introduced additional standardization requirements for data exchange formats, cybersecurity protocols, and cloud connectivity interfaces. Standards like OPC-UA for secure industrial communication and MTConnect for manufacturing data integration are becoming increasingly important for modern vision system deployments that require real-time data analytics and remote monitoring capabilities.
Real-time Processing Requirements and Challenges
Real-time processing represents a fundamental differentiator between visual servoing and automated vision inspection systems, with each domain imposing distinct temporal constraints and computational demands. Visual servoing applications typically require processing cycles ranging from 1-10 milliseconds to maintain stable closed-loop control, while automated vision inspection systems generally operate within 50-500 millisecond windows, depending on production line speeds and inspection complexity.
The computational architecture for visual servoing must prioritize deterministic response times over processing accuracy, often employing simplified algorithms and dedicated hardware accelerators. Edge detection, feature tracking, and pose estimation algorithms are frequently optimized through lookup tables, parallel processing units, and specialized vision processors to meet stringent timing requirements. This approach contrasts sharply with automated vision inspection systems, which can leverage more sophisticated algorithms including deep learning models and multi-scale analysis techniques within their extended processing windows.
Memory bandwidth and data throughput present significant challenges across both domains. Visual servoing systems must handle continuous image streams while maintaining minimal latency, requiring high-speed memory interfaces and efficient data pipelines. Buffer management becomes critical as frame dropping can destabilize control loops. Automated vision inspection faces different challenges, processing higher resolution images with complex feature extraction requirements, often necessitating substantial computational resources for defect classification and measurement accuracy.
Hardware acceleration strategies differ markedly between applications. Visual servoing increasingly relies on FPGA-based implementations and specialized vision chips that provide predictable processing times. GPU acceleration, while powerful, introduces variable latency that can compromise control stability. Conversely, automated vision inspection systems benefit from GPU parallel processing capabilities, particularly for deep learning inference and complex image analysis tasks where throughput matters more than consistent timing.
System integration challenges emerge from the need to balance processing speed with accuracy requirements. Visual servoing systems must implement sophisticated prediction algorithms and motion compensation techniques to account for processing delays. Automated vision inspection systems face different integration challenges, requiring seamless coordination with production control systems while maintaining inspection quality standards under varying operational conditions.
The computational architecture for visual servoing must prioritize deterministic response times over processing accuracy, often employing simplified algorithms and dedicated hardware accelerators. Edge detection, feature tracking, and pose estimation algorithms are frequently optimized through lookup tables, parallel processing units, and specialized vision processors to meet stringent timing requirements. This approach contrasts sharply with automated vision inspection systems, which can leverage more sophisticated algorithms including deep learning models and multi-scale analysis techniques within their extended processing windows.
Memory bandwidth and data throughput present significant challenges across both domains. Visual servoing systems must handle continuous image streams while maintaining minimal latency, requiring high-speed memory interfaces and efficient data pipelines. Buffer management becomes critical as frame dropping can destabilize control loops. Automated vision inspection faces different challenges, processing higher resolution images with complex feature extraction requirements, often necessitating substantial computational resources for defect classification and measurement accuracy.
Hardware acceleration strategies differ markedly between applications. Visual servoing increasingly relies on FPGA-based implementations and specialized vision chips that provide predictable processing times. GPU acceleration, while powerful, introduces variable latency that can compromise control stability. Conversely, automated vision inspection systems benefit from GPU parallel processing capabilities, particularly for deep learning inference and complex image analysis tasks where throughput matters more than consistent timing.
System integration challenges emerge from the need to balance processing speed with accuracy requirements. Visual servoing systems must implement sophisticated prediction algorithms and motion compensation techniques to account for processing delays. Automated vision inspection systems face different integration challenges, requiring seamless coordination with production control systems while maintaining inspection quality standards under varying operational conditions.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!