Visual Servoing vs Network-Driven Systems: Latency Analysis
APR 13, 20269 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Visual Servoing vs Network Systems Background and Objectives
Visual servoing and network-driven systems represent two fundamental paradigms in modern robotics and automation, each addressing the critical challenge of real-time control with distinct architectural approaches. Visual servoing systems utilize direct visual feedback from cameras to control robotic movements, creating closed-loop control systems where image processing and motion commands occur within localized computational environments. This approach has evolved from early template-matching algorithms in the 1980s to sophisticated deep learning-based perception systems capable of handling complex visual scenes and dynamic environments.
Network-driven systems, conversely, leverage distributed computing architectures where sensor data, processing capabilities, and control commands are transmitted across network infrastructures. These systems have gained prominence with the advancement of 5G networks, edge computing, and cloud-based robotics platforms. The distributed nature allows for enhanced computational power, shared intelligence across multiple robotic units, and centralized optimization of complex multi-agent systems.
The latency characteristics of these two paradigms present fundamentally different challenges and opportunities. Visual servoing systems typically achieve lower latency due to their localized processing architecture, with control loops operating at frequencies ranging from 30Hz to 1kHz depending on the complexity of visual processing algorithms. However, they are constrained by onboard computational resources and may struggle with computationally intensive perception tasks.
Network-driven systems face inherent latency challenges introduced by data transmission, network congestion, and distributed processing delays. These systems must contend with variable network conditions, packet loss, and the fundamental physical limitations of signal propagation. Despite these challenges, they offer superior scalability, computational flexibility, and the ability to leverage advanced AI algorithms that exceed local processing capabilities.
The convergence of these paradigms has become increasingly relevant as robotics applications demand both real-time responsiveness and sophisticated intelligence. Applications in autonomous vehicles, industrial automation, surgical robotics, and drone swarms require careful consideration of latency trade-offs between local visual servoing capabilities and network-enhanced intelligence.
Current technological trends indicate a hybrid approach where edge computing bridges the gap between pure visual servoing and fully network-dependent systems. This evolution aims to optimize the balance between computational capability, response time, and system reliability, establishing new benchmarks for latency-critical robotic applications in increasingly connected environments.
Network-driven systems, conversely, leverage distributed computing architectures where sensor data, processing capabilities, and control commands are transmitted across network infrastructures. These systems have gained prominence with the advancement of 5G networks, edge computing, and cloud-based robotics platforms. The distributed nature allows for enhanced computational power, shared intelligence across multiple robotic units, and centralized optimization of complex multi-agent systems.
The latency characteristics of these two paradigms present fundamentally different challenges and opportunities. Visual servoing systems typically achieve lower latency due to their localized processing architecture, with control loops operating at frequencies ranging from 30Hz to 1kHz depending on the complexity of visual processing algorithms. However, they are constrained by onboard computational resources and may struggle with computationally intensive perception tasks.
Network-driven systems face inherent latency challenges introduced by data transmission, network congestion, and distributed processing delays. These systems must contend with variable network conditions, packet loss, and the fundamental physical limitations of signal propagation. Despite these challenges, they offer superior scalability, computational flexibility, and the ability to leverage advanced AI algorithms that exceed local processing capabilities.
The convergence of these paradigms has become increasingly relevant as robotics applications demand both real-time responsiveness and sophisticated intelligence. Applications in autonomous vehicles, industrial automation, surgical robotics, and drone swarms require careful consideration of latency trade-offs between local visual servoing capabilities and network-enhanced intelligence.
Current technological trends indicate a hybrid approach where edge computing bridges the gap between pure visual servoing and fully network-dependent systems. This evolution aims to optimize the balance between computational capability, response time, and system reliability, establishing new benchmarks for latency-critical robotic applications in increasingly connected environments.
Market Demand for Low-Latency Robotic Control Systems
The global robotics market is experiencing unprecedented growth driven by increasing automation demands across manufacturing, healthcare, logistics, and service sectors. Industrial automation continues to be the primary driver, with manufacturers seeking higher precision, efficiency, and reliability in their production processes. The automotive industry, in particular, requires robotic systems capable of performing complex assembly tasks with minimal latency to maintain production line efficiency and quality standards.
Healthcare robotics represents another rapidly expanding segment where low-latency control systems are critical. Surgical robots, rehabilitation devices, and assistive technologies demand real-time responsiveness to ensure patient safety and treatment effectiveness. The aging global population and increasing healthcare costs are accelerating adoption of robotic solutions that can provide consistent, precise medical interventions.
Emerging applications in autonomous vehicles, drones, and mobile robotics are creating new market segments with stringent latency requirements. These systems must process visual information and execute control commands within milliseconds to navigate safely in dynamic environments. The convergence of artificial intelligence, computer vision, and robotics is expanding the addressable market for low-latency control solutions.
The competitive landscape reveals significant market opportunities for companies developing advanced control architectures. Traditional visual servoing systems face challenges in meeting the latency requirements of next-generation applications, creating demand for hybrid approaches that combine local processing with network-driven intelligence. Edge computing integration is becoming essential for applications requiring both low latency and advanced computational capabilities.
Market research indicates strong demand from small and medium enterprises seeking cost-effective robotic solutions with professional-grade performance. These customers require systems that balance latency performance with affordability, driving innovation in control system architectures. The trend toward collaborative robotics and human-robot interaction further emphasizes the importance of responsive control systems that can adapt quickly to changing operational conditions.
Geographic analysis shows particularly strong demand growth in Asia-Pacific regions, where manufacturing automation is accelerating rapidly. European markets demonstrate increasing focus on precision applications, while North American markets emphasize integration with existing industrial infrastructure and compliance with safety standards.
Healthcare robotics represents another rapidly expanding segment where low-latency control systems are critical. Surgical robots, rehabilitation devices, and assistive technologies demand real-time responsiveness to ensure patient safety and treatment effectiveness. The aging global population and increasing healthcare costs are accelerating adoption of robotic solutions that can provide consistent, precise medical interventions.
Emerging applications in autonomous vehicles, drones, and mobile robotics are creating new market segments with stringent latency requirements. These systems must process visual information and execute control commands within milliseconds to navigate safely in dynamic environments. The convergence of artificial intelligence, computer vision, and robotics is expanding the addressable market for low-latency control solutions.
The competitive landscape reveals significant market opportunities for companies developing advanced control architectures. Traditional visual servoing systems face challenges in meeting the latency requirements of next-generation applications, creating demand for hybrid approaches that combine local processing with network-driven intelligence. Edge computing integration is becoming essential for applications requiring both low latency and advanced computational capabilities.
Market research indicates strong demand from small and medium enterprises seeking cost-effective robotic solutions with professional-grade performance. These customers require systems that balance latency performance with affordability, driving innovation in control system architectures. The trend toward collaborative robotics and human-robot interaction further emphasizes the importance of responsive control systems that can adapt quickly to changing operational conditions.
Geographic analysis shows particularly strong demand growth in Asia-Pacific regions, where manufacturing automation is accelerating rapidly. European markets demonstrate increasing focus on precision applications, while North American markets emphasize integration with existing industrial infrastructure and compliance with safety standards.
Current Latency Challenges in Visual and Network Control
Visual servoing systems face significant latency challenges stemming from the computational complexity of real-time image processing and feature extraction. The typical visual feedback loop involves image acquisition, preprocessing, feature detection, pose estimation, and control command generation, creating a cascading delay effect. Modern high-resolution cameras operating at 60-120 fps generate substantial data volumes that require intensive processing, often resulting in end-to-end latencies ranging from 50-200 milliseconds depending on algorithm complexity and hardware capabilities.
Network-driven control systems encounter distinct latency issues primarily related to communication delays and network infrastructure limitations. Wireless communication protocols introduce variable delays due to signal propagation, packet routing, and network congestion. Industrial wireless networks typically exhibit latencies between 10-100 milliseconds, while cellular networks can experience delays exceeding 200 milliseconds during peak usage periods. Network jitter and packet loss further compound these challenges, creating unpredictable timing variations that compromise control system stability.
The deterministic nature of visual servoing latency contrasts sharply with the stochastic characteristics of network delays. Visual processing latency remains relatively consistent for given hardware configurations and algorithmic implementations, allowing for predictable compensation strategies. However, network latency exhibits high variability influenced by external factors such as bandwidth availability, network topology changes, and interference patterns, making real-time compensation significantly more challenging.
Edge computing architectures have emerged as a critical solution for reducing network-induced latencies by processing control algorithms closer to sensors and actuators. This approach can reduce round-trip communication delays by 60-80% compared to cloud-based processing. However, edge devices often possess limited computational resources, creating trade-offs between processing capability and latency reduction that must be carefully balanced based on application requirements.
Hybrid systems combining visual and network control face compounded latency challenges where delays from both domains accumulate. The synchronization of visual feedback with network-transmitted commands becomes particularly problematic when latency characteristics differ significantly between subsystems. Advanced buffering and prediction algorithms are increasingly employed to mitigate these temporal mismatches, though they introduce additional computational overhead that can paradoxically increase overall system latency.
Network-driven control systems encounter distinct latency issues primarily related to communication delays and network infrastructure limitations. Wireless communication protocols introduce variable delays due to signal propagation, packet routing, and network congestion. Industrial wireless networks typically exhibit latencies between 10-100 milliseconds, while cellular networks can experience delays exceeding 200 milliseconds during peak usage periods. Network jitter and packet loss further compound these challenges, creating unpredictable timing variations that compromise control system stability.
The deterministic nature of visual servoing latency contrasts sharply with the stochastic characteristics of network delays. Visual processing latency remains relatively consistent for given hardware configurations and algorithmic implementations, allowing for predictable compensation strategies. However, network latency exhibits high variability influenced by external factors such as bandwidth availability, network topology changes, and interference patterns, making real-time compensation significantly more challenging.
Edge computing architectures have emerged as a critical solution for reducing network-induced latencies by processing control algorithms closer to sensors and actuators. This approach can reduce round-trip communication delays by 60-80% compared to cloud-based processing. However, edge devices often possess limited computational resources, creating trade-offs between processing capability and latency reduction that must be carefully balanced based on application requirements.
Hybrid systems combining visual and network control face compounded latency challenges where delays from both domains accumulate. The synchronization of visual feedback with network-transmitted commands becomes particularly problematic when latency characteristics differ significantly between subsystems. Advanced buffering and prediction algorithms are increasingly employed to mitigate these temporal mismatches, though they introduce additional computational overhead that can paradoxically increase overall system latency.
Existing Latency Optimization Solutions and Approaches
01 Network latency compensation in visual servoing systems
Methods and systems for compensating network-induced delays in visual servoing applications through predictive algorithms, buffering techniques, and time-stamping mechanisms. These approaches enable real-time control by estimating future states and adjusting control commands to account for communication delays between visual sensors and actuators.- Latency compensation in visual servoing systems: Visual servoing systems often experience latency due to image processing and network transmission delays. Compensation techniques include predictive control algorithms, motion prediction models, and feedforward control strategies that anticipate system delays. These methods help maintain stability and accuracy in real-time visual feedback control by estimating future positions and adjusting control commands accordingly.
- Network delay measurement and management: Accurate measurement and management of network delays are critical for time-sensitive applications. Techniques include timestamping mechanisms, round-trip time calculations, and adaptive buffering strategies. Systems may implement quality of service protocols, priority-based packet scheduling, and network monitoring to minimize and predict latency variations in distributed control systems.
- Real-time image processing optimization: Reducing computational latency in visual servoing requires optimized image processing pipelines. Approaches include hardware acceleration using specialized processors, parallel processing architectures, and efficient algorithm implementations. Feature extraction and tracking algorithms are optimized for speed while maintaining accuracy, enabling faster visual feedback loops in servo control applications.
- Distributed control architecture for latency reduction: Distributed system architectures help minimize latency by distributing processing tasks across multiple nodes. Edge computing approaches process visual data closer to sensors, reducing transmission delays. Hierarchical control structures separate high-level planning from low-level control, allowing faster local responses while maintaining global coordination in networked robotic systems.
- Synchronization mechanisms in networked visual systems: Maintaining temporal coherence between visual sensors and actuators requires robust synchronization protocols. Clock synchronization algorithms, time-stamped data packets, and event-driven architectures ensure coordinated operation across distributed components. These mechanisms account for variable network delays and enable precise timing control in multi-camera and multi-robot visual servoing applications.
02 Adaptive control strategies for network-driven robotic systems
Adaptive control frameworks that dynamically adjust system parameters based on measured network latency and jitter. These strategies include variable gain controllers, adaptive filtering, and learning-based approaches that optimize performance under varying network conditions to maintain stability and accuracy in visual servoing tasks.Expand Specific Solutions03 Quality of Service management for visual feedback systems
Techniques for managing network Quality of Service parameters to prioritize visual data transmission and reduce latency in networked control systems. These include bandwidth allocation, packet prioritization, and traffic shaping methods that ensure timely delivery of critical visual information for servo control applications.Expand Specific Solutions04 Distributed processing architectures for reducing end-to-end latency
System architectures that distribute visual processing and control computation across multiple nodes to minimize overall latency. These designs include edge computing implementations, parallel processing frameworks, and hierarchical control structures that reduce the impact of network delays on system responsiveness.Expand Specific Solutions05 Synchronization and timing protocols for networked visual servoing
Protocols and mechanisms for maintaining temporal synchronization between distributed components in visual servoing systems. These include clock synchronization algorithms, event-based triggering methods, and timestamp-based coordination schemes that ensure coherent operation despite network-induced timing uncertainties.Expand Specific Solutions
Key Players in Robotic Control and Network Infrastructure
The visual servoing versus network-driven systems latency analysis represents a rapidly evolving technological domain currently in its growth phase, driven by increasing demands for real-time autonomous systems and edge computing applications. The market demonstrates substantial expansion potential, particularly in robotics, autonomous vehicles, and industrial automation sectors. Technology maturity varies significantly across key players, with established giants like Huawei Technologies, Intel Corp., and Samsung Electronics leading in network infrastructure and processing capabilities, while Microsoft Corp. and Amazon Technologies drive cloud-based solutions. Telecommunications leaders including NTT Inc., AT&T, and Juniper Networks focus on network optimization, whereas specialized firms like Crytek GmbH and Liquidsky Software advance real-time processing technologies. Academic institutions such as Peking University and Beijing University of Posts & Telecommunications contribute fundamental research, creating a competitive landscape where traditional hardware manufacturers, cloud providers, and research institutions collaborate to minimize latency in vision-based control systems.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed comprehensive solutions for visual servoing and network-driven systems with focus on latency optimization. Their approach integrates 5G Ultra-Reliable Low Latency Communication (URLLC) technology to achieve sub-millisecond latency for visual servoing applications. The company implements edge computing architectures that process visual data locally, reducing round-trip delays from 50-100ms in traditional cloud-based systems to under 10ms. Their visual servoing framework utilizes AI-accelerated image processing chips combined with optimized network protocols to minimize end-to-end latency in robotic control systems.
Strengths: Advanced 5G URLLC technology, integrated edge computing solutions, AI-accelerated processing. Weaknesses: Limited global deployment due to geopolitical restrictions, higher infrastructure costs.
Intel Corp.
Technical Solution: Intel provides hardware and software solutions for latency-critical visual servoing applications through their Real-Time Systems portfolio. Their approach combines Intel RealSense depth cameras with optimized processors featuring Time-Coordinated Computing technology. The solution achieves deterministic latency performance by implementing hardware-based time synchronization and dedicated visual processing units. Intel's network-driven systems utilize their Ethernet Time-Sensitive Networking (TSN) technology to guarantee bounded latency for industrial automation applications. Their integrated approach reduces visual processing latency to under 5ms while maintaining microsecond-level network timing precision for closed-loop control systems.
Strengths: Hardware-software integration, TSN technology leadership, deterministic performance guarantees. Weaknesses: Higher power consumption, complex system integration requirements.
Core Innovations in Real-Time Control System Design
Systems and methods for real time visual servoing using a differentiable model predictive control framework
PatentActiveIN202121044482A
Innovation
- A differentiable model predictive control framework is implemented using a processor-based method that generates optimal control commands by iteratively minimizing predicted optical flow losses, with a flow normalization layer and a neural network trained for on-the-fly adaptation, enabling real-time visual servoing.




Vision system with deterministic low-latency communication
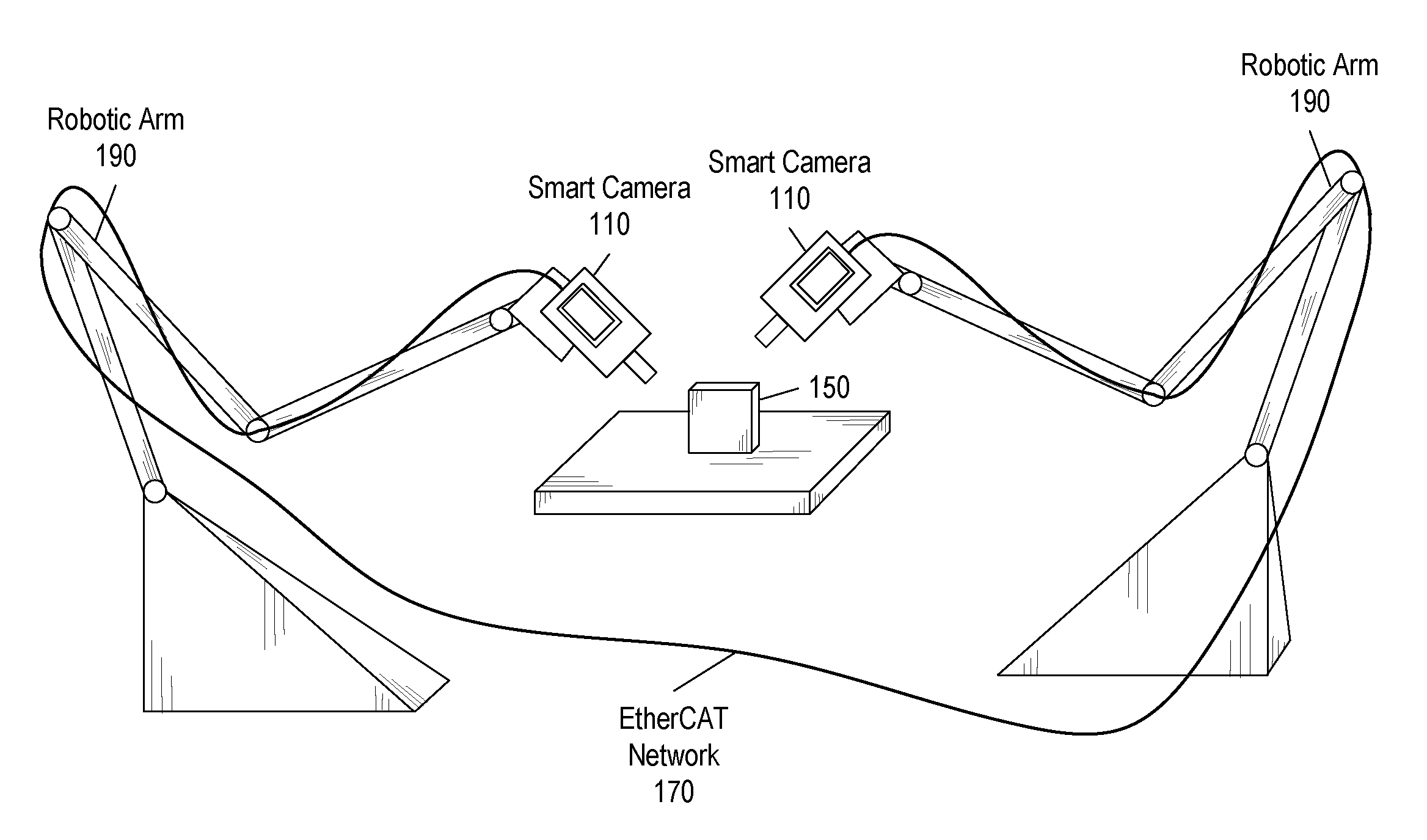
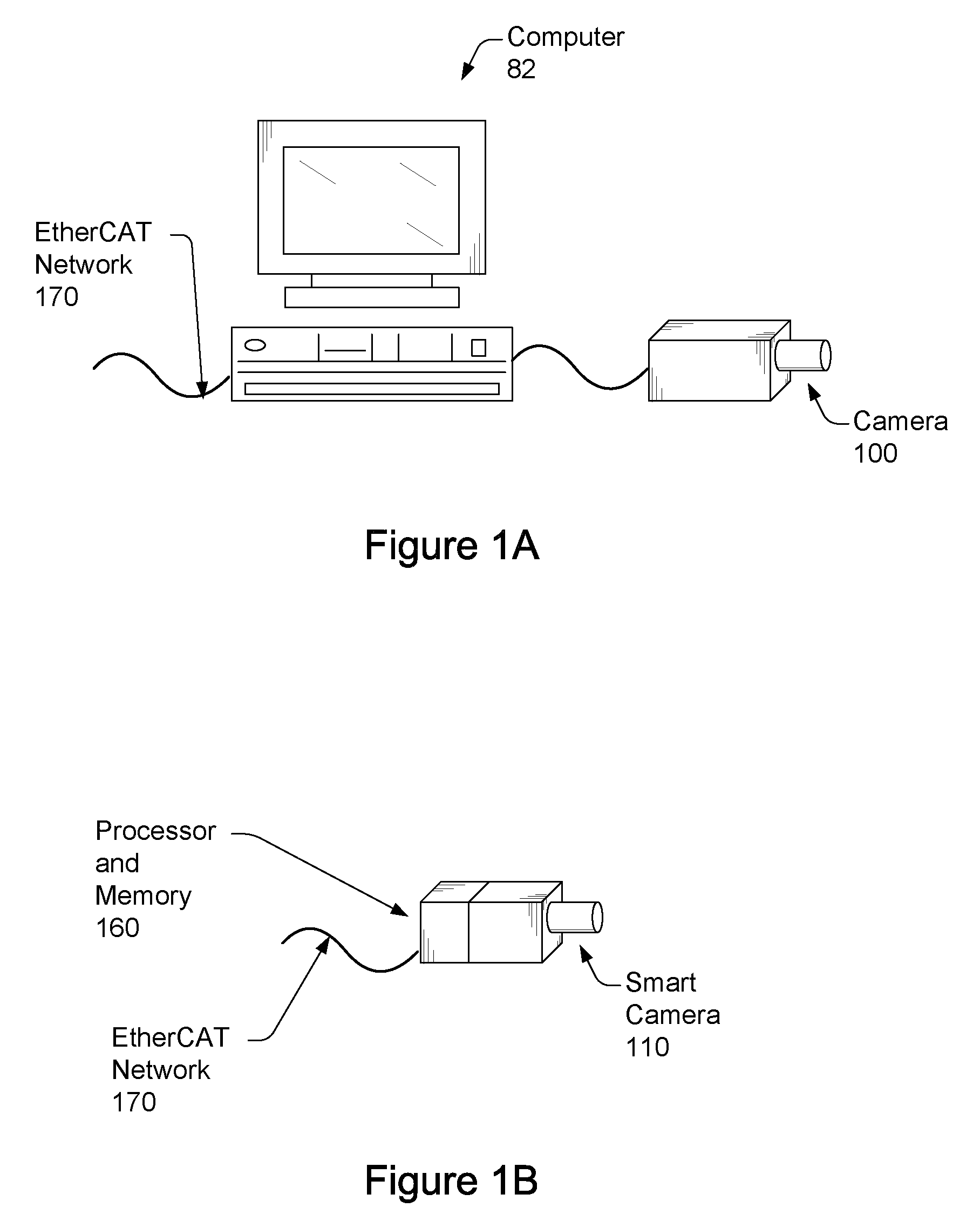
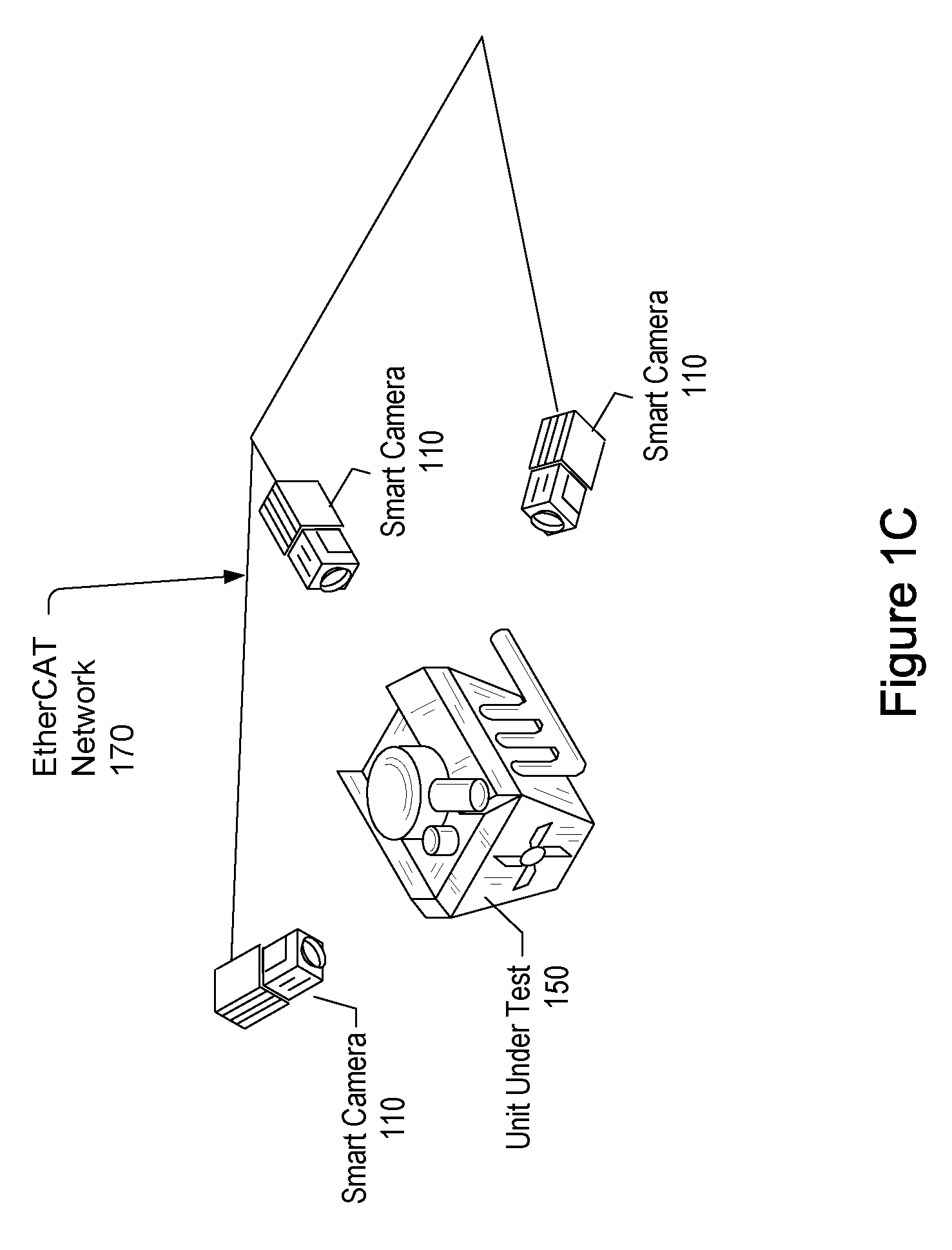
PatentActiveUS7760238B2
Innovation
- Implementing a low-latency deterministic Ethernet-based network interface, such as EtherCAT, to enable deterministic low-latency communication between machine vision systems and devices, allowing for synchronized operation and high-frequency visual servoing control loops.

Edge Computing Integration for Latency Reduction
Edge computing represents a paradigmatic shift in addressing latency challenges inherent in both visual servoing and network-driven systems. By deploying computational resources closer to data sources and actuators, edge computing architectures fundamentally reduce the round-trip time between sensing, processing, and control actions. This proximity-based approach becomes particularly critical when comparing visual servoing systems that require real-time image processing with network-driven systems that depend on centralized command distribution.
The integration of edge computing nodes at strategic locations within robotic systems enables local processing of visual data, eliminating the need to transmit high-bandwidth video streams to remote servers. For visual servoing applications, this means that feature extraction, object tracking, and control law computations can occur within milliseconds rather than the tens or hundreds of milliseconds typical in cloud-based architectures. Edge processors equipped with specialized hardware accelerators, such as GPUs or dedicated AI chips, can perform complex computer vision algorithms while maintaining deterministic timing characteristics.
Network-driven systems benefit from edge computing through distributed control architectures that partition decision-making across multiple edge nodes. Rather than relying on a single centralized controller, these systems can implement hierarchical control structures where time-critical operations execute locally while higher-level coordination occurs through optimized inter-node communication protocols. This approach significantly reduces the impact of network variability on system performance.
Modern edge computing implementations leverage containerized applications and microservices architectures to enable rapid deployment and scaling of processing capabilities. These systems can dynamically allocate computational resources based on real-time latency requirements, automatically migrating processing tasks between edge nodes to maintain optimal performance. Advanced edge orchestration platforms provide seamless integration with existing robotic control systems while offering standardized APIs for both visual servoing and network-driven applications.
The convergence of 5G networks with edge computing infrastructure creates unprecedented opportunities for ultra-low latency applications. Multi-access edge computing platforms can achieve sub-millisecond processing delays while providing the computational power necessary for sophisticated visual processing algorithms, effectively bridging the performance gap between local and distributed control systems.
The integration of edge computing nodes at strategic locations within robotic systems enables local processing of visual data, eliminating the need to transmit high-bandwidth video streams to remote servers. For visual servoing applications, this means that feature extraction, object tracking, and control law computations can occur within milliseconds rather than the tens or hundreds of milliseconds typical in cloud-based architectures. Edge processors equipped with specialized hardware accelerators, such as GPUs or dedicated AI chips, can perform complex computer vision algorithms while maintaining deterministic timing characteristics.
Network-driven systems benefit from edge computing through distributed control architectures that partition decision-making across multiple edge nodes. Rather than relying on a single centralized controller, these systems can implement hierarchical control structures where time-critical operations execute locally while higher-level coordination occurs through optimized inter-node communication protocols. This approach significantly reduces the impact of network variability on system performance.
Modern edge computing implementations leverage containerized applications and microservices architectures to enable rapid deployment and scaling of processing capabilities. These systems can dynamically allocate computational resources based on real-time latency requirements, automatically migrating processing tasks between edge nodes to maintain optimal performance. Advanced edge orchestration platforms provide seamless integration with existing robotic control systems while offering standardized APIs for both visual servoing and network-driven applications.
The convergence of 5G networks with edge computing infrastructure creates unprecedented opportunities for ultra-low latency applications. Multi-access edge computing platforms can achieve sub-millisecond processing delays while providing the computational power necessary for sophisticated visual processing algorithms, effectively bridging the performance gap between local and distributed control systems.
Safety Standards for Real-Time Robotic Applications
Real-time robotic applications operating through visual servoing and network-driven architectures must adhere to stringent safety standards that account for latency-induced risks. The fundamental safety framework requires establishing maximum allowable response times based on the specific robotic application's hazard potential and operational environment.
ISO 13849 and IEC 61508 form the cornerstone safety standards for robotic systems, defining Performance Level (PL) and Safety Integrity Level (SIL) requirements respectively. For visual servoing systems, these standards mandate that safety-critical functions maintain deterministic response times, typically requiring reaction times under 100 milliseconds for high-risk applications. Network-driven systems face additional complexity as communication delays can introduce unpredictable latency variations that compromise safety compliance.
The safety architecture must implement redundant monitoring systems that continuously assess latency performance against predefined thresholds. When visual servoing systems experience processing delays exceeding safety limits, automatic failsafe mechanisms must engage within specified time windows. Network-driven systems require additional safeguards including watchdog timers, heartbeat protocols, and emergency stop circuits that operate independently of network communication.
Risk assessment protocols under ISO 12100 necessitate comprehensive latency analysis during system design phases. This includes worst-case scenario modeling where maximum expected delays are evaluated against potential harm severity. Visual servoing applications must account for image processing delays, while network-driven systems must consider packet loss, jitter, and bandwidth limitations in their safety calculations.
Certification requirements demand extensive testing documentation proving that latency characteristics remain within safety bounds across all operational conditions. This includes environmental stress testing, network congestion scenarios, and computational load variations. Safety validation must demonstrate that both visual servoing and network-driven approaches maintain their specified response times throughout the system's operational lifetime, ensuring continuous compliance with applicable safety standards.
ISO 13849 and IEC 61508 form the cornerstone safety standards for robotic systems, defining Performance Level (PL) and Safety Integrity Level (SIL) requirements respectively. For visual servoing systems, these standards mandate that safety-critical functions maintain deterministic response times, typically requiring reaction times under 100 milliseconds for high-risk applications. Network-driven systems face additional complexity as communication delays can introduce unpredictable latency variations that compromise safety compliance.
The safety architecture must implement redundant monitoring systems that continuously assess latency performance against predefined thresholds. When visual servoing systems experience processing delays exceeding safety limits, automatic failsafe mechanisms must engage within specified time windows. Network-driven systems require additional safeguards including watchdog timers, heartbeat protocols, and emergency stop circuits that operate independently of network communication.
Risk assessment protocols under ISO 12100 necessitate comprehensive latency analysis during system design phases. This includes worst-case scenario modeling where maximum expected delays are evaluated against potential harm severity. Visual servoing applications must account for image processing delays, while network-driven systems must consider packet loss, jitter, and bandwidth limitations in their safety calculations.
Certification requirements demand extensive testing documentation proving that latency characteristics remain within safety bounds across all operational conditions. This includes environmental stress testing, network congestion scenarios, and computational load variations. Safety validation must demonstrate that both visual servoing and network-driven approaches maintain their specified response times throughout the system's operational lifetime, ensuring continuous compliance with applicable safety standards.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!