

A claw-type reconfigurable robot unit module
A technology for reconstructing robots and unit modules, applied in the field of robots, can solve the problems of complex structure, inconvenience in popularization and promotion, and high development cost, and achieve the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
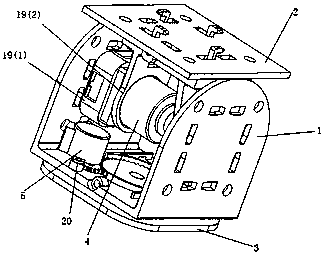
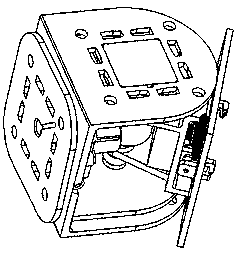
[0038] Such as figure 1 , figure 2 As shown, the claw-type reconfigurable robot unit module is a cuboid of 100mm*100mm*112mm, including an outer U-shaped frame 1, an inner U-shaped frame 2, and a rotating Base substrate 3, a spindle turning stepping reduction motor 4, a base rotating stepping reduction motor 5, a stepping reduction motor 16, an active connection mechanism, three passive connection surfaces, and a set of inner and outer frame connectors, namely the motor bracket 19 , rotating shaft 17 and stamping bearing 18.
[0039] This unit module can realize the relative rotation between the outer U-shaped frame 1 and the inner U-shaped frame 2 under the drive of the spindle turning stepping gear motor 4, and the maximum angle is ±90°, such as figure 2 shown, for the figure 1 Basically, the main shaft turns over and the stepping reduction motor 4 drives the inner frame 2 to rotate clockwise around the outer U-shaped frame 1.
[0040] Such as Figure 5 , Figure 6 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More