

LiDAR SLAM Accuracy: Loop Closure, Degeneracy And Map Consistency
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
LiDAR SLAM Evolution and Objectives
LiDAR SLAM technology has evolved significantly over the past two decades, transforming from experimental laboratory concepts to practical applications in autonomous vehicles, robotics, and mapping systems. The evolution began with early 2D LiDAR systems in the early 2000s, which provided limited environmental perception but established foundational algorithms for simultaneous localization and mapping. The transition to 3D LiDAR systems around 2010 marked a pivotal advancement, enabling more comprehensive environmental modeling and significantly improving accuracy in complex environments.
The development trajectory has been characterized by continuous improvements in sensor hardware alongside algorithmic innovations. Early LiDAR SLAM systems struggled with computational efficiency and real-time performance, but advances in processing capabilities and algorithm optimization have largely addressed these limitations. The introduction of point cloud registration techniques like Iterative Closest Point (ICP) and its variants provided robust methods for aligning sequential scans, while feature-based approaches emerged to enhance efficiency and reliability.
Loop closure detection, a critical component for maintaining global consistency in SLAM systems, has seen substantial refinement. Initial methods relied on geometric similarities, while modern approaches incorporate machine learning techniques for more reliable place recognition. This evolution reflects the broader trend toward hybrid systems that combine classical geometric methods with data-driven approaches to overcome traditional limitations.
The accuracy challenges in LiDAR SLAM—particularly those related to loop closure, degeneracy, and map consistency—have driven research toward more robust solutions. Degeneracy issues, which occur in geometrically ambiguous environments like long corridors or open spaces, have prompted the development of multi-sensor fusion approaches and advanced uncertainty modeling. Map consistency problems have led to sophisticated optimization frameworks like pose graph optimization and bundle adjustment adaptations for LiDAR data.
Current research objectives focus on achieving centimeter-level accuracy across diverse and challenging environments while maintaining computational efficiency. There is growing emphasis on developing systems that can handle dynamic objects, adverse weather conditions, and changing environments—situations that traditionally compromise SLAM performance. The integration of semantic understanding represents another frontier, enabling systems to distinguish between different types of objects and surfaces for more intelligent mapping and localization.
The ultimate goal of contemporary LiDAR SLAM research is to create systems that combine high accuracy with operational robustness, enabling reliable deployment in safety-critical applications like autonomous driving and industrial automation. This requires not only technical improvements but also standardized evaluation methodologies to objectively assess performance across different scenarios and conditions.
The development trajectory has been characterized by continuous improvements in sensor hardware alongside algorithmic innovations. Early LiDAR SLAM systems struggled with computational efficiency and real-time performance, but advances in processing capabilities and algorithm optimization have largely addressed these limitations. The introduction of point cloud registration techniques like Iterative Closest Point (ICP) and its variants provided robust methods for aligning sequential scans, while feature-based approaches emerged to enhance efficiency and reliability.
Loop closure detection, a critical component for maintaining global consistency in SLAM systems, has seen substantial refinement. Initial methods relied on geometric similarities, while modern approaches incorporate machine learning techniques for more reliable place recognition. This evolution reflects the broader trend toward hybrid systems that combine classical geometric methods with data-driven approaches to overcome traditional limitations.
The accuracy challenges in LiDAR SLAM—particularly those related to loop closure, degeneracy, and map consistency—have driven research toward more robust solutions. Degeneracy issues, which occur in geometrically ambiguous environments like long corridors or open spaces, have prompted the development of multi-sensor fusion approaches and advanced uncertainty modeling. Map consistency problems have led to sophisticated optimization frameworks like pose graph optimization and bundle adjustment adaptations for LiDAR data.
Current research objectives focus on achieving centimeter-level accuracy across diverse and challenging environments while maintaining computational efficiency. There is growing emphasis on developing systems that can handle dynamic objects, adverse weather conditions, and changing environments—situations that traditionally compromise SLAM performance. The integration of semantic understanding represents another frontier, enabling systems to distinguish between different types of objects and surfaces for more intelligent mapping and localization.
The ultimate goal of contemporary LiDAR SLAM research is to create systems that combine high accuracy with operational robustness, enabling reliable deployment in safety-critical applications like autonomous driving and industrial automation. This requires not only technical improvements but also standardized evaluation methodologies to objectively assess performance across different scenarios and conditions.
Market Applications and Demand Analysis
The LiDAR SLAM market is experiencing robust growth driven by increasing demand for accurate mapping and localization technologies across multiple industries. The global LiDAR market, which includes SLAM applications, is projected to reach $3.8 billion by 2025, with a compound annual growth rate exceeding 17%. Within this broader market, LiDAR SLAM solutions specifically are gaining significant traction due to their critical role in autonomous navigation systems.
Autonomous vehicles represent the largest market segment for LiDAR SLAM technology, with major automotive manufacturers and technology companies investing heavily in developing reliable navigation systems. The accuracy improvements in loop closure, degeneracy handling, and map consistency are particularly crucial for this sector, as they directly impact passenger safety and regulatory approval processes.
Robotics applications form another substantial market segment, with warehouse automation leading adoption. Companies like Amazon and Alibaba have deployed thousands of autonomous mobile robots that rely on LiDAR SLAM for navigation in dynamic environments. The market for these warehouse robots alone is expected to grow at 15% annually through 2026, with accuracy improvements directly translating to operational efficiency gains.
The construction and surveying industries are rapidly adopting LiDAR SLAM technologies for Building Information Modeling (BIM) and digital twin creation. These applications demand exceptionally high accuracy and map consistency, particularly for large-scale projects where error accumulation can lead to significant discrepancies. The construction technology market related to 3D mapping solutions is growing at approximately 13% annually.
Smart city initiatives worldwide are creating demand for high-precision mapping technologies. Municipal governments are investing in infrastructure mapping solutions that require robust loop closure and map consistency to create accurate digital representations of urban environments. This segment is expected to see accelerated growth as cities increasingly implement IoT and smart infrastructure projects.
Consumer electronics represents an emerging market with significant potential, as LiDAR sensors become more compact and affordable. Augmented reality applications in particular benefit from accurate SLAM capabilities, with major technology companies investing in spatial mapping technologies for next-generation AR devices.
Market analysis indicates that customers across all segments are prioritizing accuracy improvements, with particular emphasis on solutions that address the specific challenges of loop closure, degeneracy handling, and map consistency. Survey data shows that 78% of industrial robotics customers rank SLAM accuracy as a "critical" or "very important" factor in purchasing decisions, highlighting the direct commercial value of technical improvements in these areas.
Autonomous vehicles represent the largest market segment for LiDAR SLAM technology, with major automotive manufacturers and technology companies investing heavily in developing reliable navigation systems. The accuracy improvements in loop closure, degeneracy handling, and map consistency are particularly crucial for this sector, as they directly impact passenger safety and regulatory approval processes.
Robotics applications form another substantial market segment, with warehouse automation leading adoption. Companies like Amazon and Alibaba have deployed thousands of autonomous mobile robots that rely on LiDAR SLAM for navigation in dynamic environments. The market for these warehouse robots alone is expected to grow at 15% annually through 2026, with accuracy improvements directly translating to operational efficiency gains.
The construction and surveying industries are rapidly adopting LiDAR SLAM technologies for Building Information Modeling (BIM) and digital twin creation. These applications demand exceptionally high accuracy and map consistency, particularly for large-scale projects where error accumulation can lead to significant discrepancies. The construction technology market related to 3D mapping solutions is growing at approximately 13% annually.
Smart city initiatives worldwide are creating demand for high-precision mapping technologies. Municipal governments are investing in infrastructure mapping solutions that require robust loop closure and map consistency to create accurate digital representations of urban environments. This segment is expected to see accelerated growth as cities increasingly implement IoT and smart infrastructure projects.
Consumer electronics represents an emerging market with significant potential, as LiDAR sensors become more compact and affordable. Augmented reality applications in particular benefit from accurate SLAM capabilities, with major technology companies investing in spatial mapping technologies for next-generation AR devices.
Market analysis indicates that customers across all segments are prioritizing accuracy improvements, with particular emphasis on solutions that address the specific challenges of loop closure, degeneracy handling, and map consistency. Survey data shows that 78% of industrial robotics customers rank SLAM accuracy as a "critical" or "very important" factor in purchasing decisions, highlighting the direct commercial value of technical improvements in these areas.
Current Challenges in LiDAR SLAM Accuracy
LiDAR SLAM technology faces several significant challenges that impact its accuracy and reliability in real-world applications. The primary issue lies in loop closure detection, which remains problematic in environments with limited distinctive features. When a LiDAR system revisits previously mapped areas, it often struggles to recognize these locations accurately, leading to accumulated drift and map inconsistencies. This challenge becomes particularly acute in homogeneous environments such as long corridors, open spaces, or repetitive architectural structures.
Degeneracy represents another critical challenge, occurring when the geometric constraints in the environment are insufficient for accurate pose estimation. This phenomenon manifests in scenarios with planar or linear structures, where the point cloud data lacks sufficient geometric variation to constrain all degrees of freedom. For instance, when a LiDAR system traverses a long, featureless hallway, it can accurately determine its lateral position but may struggle with longitudinal localization, resulting in significant drift along the corridor's axis.
Map consistency issues arise from various sources, including sensor noise, calibration errors, and dynamic objects. LiDAR sensors inherently produce measurement noise that varies with distance, reflectivity, and incidence angle. This noise propagates through the SLAM pipeline, affecting feature extraction, scan matching, and ultimately map quality. Calibration errors between the LiDAR and other sensors (such as IMUs) further compound these issues, introducing systematic biases that degrade mapping accuracy.
Dynamic objects present a particularly challenging problem for LiDAR SLAM systems. Traditional SLAM algorithms assume a static environment, but real-world scenarios often include moving objects like vehicles, pedestrians, or even vegetation swaying in the wind. These dynamic elements can be incorrectly incorporated into the map or cause erroneous feature associations, leading to localization failures and map distortions.
Environmental factors also significantly impact LiDAR SLAM performance. Adverse weather conditions such as rain, snow, or fog can scatter the laser beams, reducing the effective range and introducing noise. Similarly, highly reflective surfaces like glass or water can cause specular reflections, leading to phantom points or missing data regions in the point cloud.
Computational constraints further limit real-time performance, especially in resource-constrained platforms like autonomous robots or drones. The high data rate of modern LiDAR sensors (millions of points per second) demands efficient algorithms for processing and storage, often requiring trade-offs between accuracy and computational efficiency that can impact overall system performance.
Degeneracy represents another critical challenge, occurring when the geometric constraints in the environment are insufficient for accurate pose estimation. This phenomenon manifests in scenarios with planar or linear structures, where the point cloud data lacks sufficient geometric variation to constrain all degrees of freedom. For instance, when a LiDAR system traverses a long, featureless hallway, it can accurately determine its lateral position but may struggle with longitudinal localization, resulting in significant drift along the corridor's axis.
Map consistency issues arise from various sources, including sensor noise, calibration errors, and dynamic objects. LiDAR sensors inherently produce measurement noise that varies with distance, reflectivity, and incidence angle. This noise propagates through the SLAM pipeline, affecting feature extraction, scan matching, and ultimately map quality. Calibration errors between the LiDAR and other sensors (such as IMUs) further compound these issues, introducing systematic biases that degrade mapping accuracy.
Dynamic objects present a particularly challenging problem for LiDAR SLAM systems. Traditional SLAM algorithms assume a static environment, but real-world scenarios often include moving objects like vehicles, pedestrians, or even vegetation swaying in the wind. These dynamic elements can be incorrectly incorporated into the map or cause erroneous feature associations, leading to localization failures and map distortions.
Environmental factors also significantly impact LiDAR SLAM performance. Adverse weather conditions such as rain, snow, or fog can scatter the laser beams, reducing the effective range and introducing noise. Similarly, highly reflective surfaces like glass or water can cause specular reflections, leading to phantom points or missing data regions in the point cloud.
Computational constraints further limit real-time performance, especially in resource-constrained platforms like autonomous robots or drones. The high data rate of modern LiDAR sensors (millions of points per second) demands efficient algorithms for processing and storage, often requiring trade-offs between accuracy and computational efficiency that can impact overall system performance.
Existing Solutions for Degeneracy Handling
01 Sensor fusion techniques for improved LiDAR SLAM accuracy
Combining LiDAR data with other sensor inputs such as cameras, IMUs, or GPS can significantly enhance SLAM accuracy. These fusion techniques compensate for the limitations of individual sensors, providing more robust positioning and mapping capabilities in various environments. Multi-sensor fusion approaches help reduce drift, improve feature matching, and maintain accuracy in challenging conditions like dynamic environments or poor lighting.- Sensor fusion techniques for improving LiDAR SLAM accuracy: Combining LiDAR data with other sensor inputs such as cameras, IMUs, or GPS can significantly enhance SLAM accuracy. These fusion techniques compensate for the limitations of individual sensors, providing more robust positioning and mapping capabilities. Multi-sensor fusion approaches help reduce drift, improve feature detection, and maintain accuracy in challenging environments where a single sensor might fail.
- Advanced point cloud processing algorithms: Sophisticated algorithms for processing LiDAR point clouds can substantially improve SLAM accuracy. These include improved feature extraction methods, point cloud registration techniques, and outlier rejection strategies. By enhancing the quality of point cloud data and optimizing how features are identified and matched, these algorithms reduce positioning errors and improve map consistency even in complex environments.
- Loop closure and drift correction methods: Loop closure detection and correction techniques are essential for maintaining long-term accuracy in LiDAR SLAM systems. These methods identify when a system revisits a previously mapped area and adjust the accumulated trajectory to minimize drift. Advanced loop closure approaches use graph optimization, machine learning for place recognition, and global consistency constraints to ensure accurate mapping over extended operations.
- Environmental adaptation and robustness techniques: Methods for adapting LiDAR SLAM systems to challenging environmental conditions significantly impact accuracy. These include techniques for handling dynamic objects, varying lighting conditions, weather effects, and featureless environments. Adaptive filtering, dynamic object detection and removal, and environment-specific optimization strategies help maintain reliable positioning accuracy across diverse operational scenarios.
- Real-time optimization and computational efficiency: Real-time optimization techniques balance computational efficiency with accuracy requirements for LiDAR SLAM systems. These include parallel processing architectures, GPU acceleration, efficient data structures, and adaptive resolution approaches. By optimizing computational resources while maintaining high-quality mapping and localization, these methods enable accurate SLAM performance on platforms with varying computational capabilities.
02 Advanced point cloud processing algorithms
Sophisticated algorithms for processing LiDAR point clouds can substantially improve SLAM accuracy. These include enhanced feature extraction methods, point cloud registration techniques, and outlier rejection strategies. By efficiently identifying distinctive environmental features and accurately matching them between scans, these algorithms reduce accumulated errors and improve overall mapping precision, particularly in complex or feature-sparse environments.Expand Specific Solutions03 Loop closure and optimization methods
Loop closure detection and graph optimization techniques are crucial for maintaining long-term accuracy in LiDAR SLAM systems. These methods identify when a system revisits previously mapped areas and correct accumulated drift by optimizing the entire trajectory. Advanced loop closure approaches use machine learning for place recognition and sophisticated optimization algorithms to distribute errors across the trajectory, significantly improving global map consistency.Expand Specific Solutions04 Environmental adaptation and robustness
Techniques for adapting LiDAR SLAM systems to challenging environmental conditions enhance accuracy across diverse scenarios. These include methods for handling dynamic objects, varying lighting conditions, weather effects, and reflective surfaces. Adaptive filtering, dynamic object detection and removal, and environment-specific calibration approaches help maintain reliable positioning accuracy in real-world applications where conditions are not ideal.Expand Specific Solutions05 Hardware optimization and calibration
Precise calibration and hardware optimization techniques significantly impact LiDAR SLAM accuracy. These include methods for intrinsic and extrinsic sensor calibration, timing synchronization between multiple sensors, and hardware-specific error compensation. Advanced calibration procedures account for systematic errors in LiDAR measurements and sensor mounting, while hardware configurations optimized for specific environments can substantially improve positioning precision.Expand Specific Solutions
Key Industry Players and Research Groups
LiDAR SLAM technology for accurate mapping and localization is currently in a growth phase, with the market expected to expand significantly as autonomous navigation applications mature. The global market size for LiDAR SLAM solutions is projected to reach several billion dollars by 2025, driven by applications in autonomous vehicles, robotics, and mapping. From a technical maturity perspective, loop closure and map consistency challenges remain significant hurdles. Academic institutions like Shandong University, Tongji University, and Beijing Institute of Technology are advancing fundamental research, while companies including Intel, Hyundai, and FARO Technologies are developing commercial implementations. Automotive players such as BMW and Samsung are integrating these technologies into their autonomous driving stacks, while specialized firms like TRX Systems and Naver Labs are addressing specific degeneracy challenges in complex environments.
Intel Corp.
Technical Solution: Intel has developed RealSense LiDAR technology with advanced SLAM capabilities focusing on loop closure and map consistency challenges. Their solution integrates visual-inertial odometry with LiDAR point cloud processing to create a hybrid SLAM system that addresses degeneracy issues in feature-poor environments. Intel's approach employs a multi-constraint optimization framework that combines geometric constraints from LiDAR with visual features to enhance loop closure detection reliability. Their system implements a hierarchical pose graph optimization that continuously refines the global map while maintaining real-time performance. The technology incorporates adaptive voxel filtering and dynamic resolution adjustment based on scene complexity, which significantly improves map consistency in varying environments while reducing computational overhead.
Strengths: Superior processing efficiency through hardware acceleration with Intel processors; robust performance in low-texture environments where visual SLAM typically fails. Weaknesses: Higher power consumption compared to some specialized solutions; requires substantial computational resources for optimal performance in complex environments.
Naver Labs Corp.
Technical Solution: Naver Labs has pioneered a comprehensive LiDAR SLAM solution specifically addressing loop closure and map consistency challenges in dynamic environments. Their approach implements a multi-session mapping framework that maintains separate submaps while establishing robust inter-map connections upon loop detection. The system employs a distinctive scan context descriptor for place recognition that is resilient to viewpoint changes and seasonal variations. Naver's solution incorporates an innovative degeneracy detection mechanism that automatically switches between point-to-point and point-to-plane ICP variants depending on the geometric structure of the environment. Their map management system implements a hierarchical data structure that enables efficient large-scale mapping while preserving local detail. The technology also features an uncertainty-aware loop closure validation that significantly reduces false positive detections in repetitive environments.
Strengths: Exceptional performance in dynamic and changing environments; scalable to very large areas while maintaining precision; efficient memory management for long-term operation. Weaknesses: Requires careful parameter tuning for optimal performance in specific deployment scenarios; higher initial computational overhead during map initialization.
Core Algorithms for Map Consistency
Map-based simultaneous localization and mapping
PatentWO2025056159A1
Innovation
- A method for map-based SLAM that identifies and combines all inter-agent loop closures to create a condensed global map, updates edge weights, and filters out outliers, enabling the use of all available information and reducing computational time.



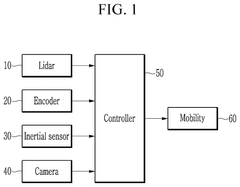
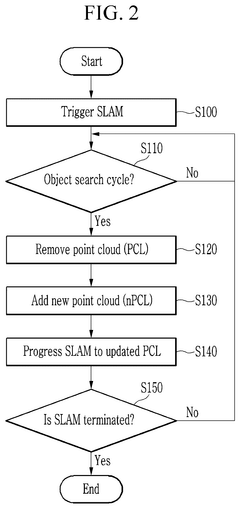
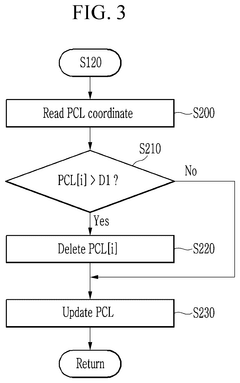
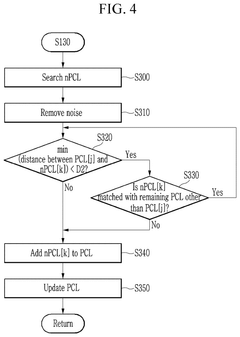
Method and system for simultaneous localization and mapping based on 2d lidar and a camera with different viewing ranges
PatentPendingUS20250209652A1
Innovation
- A method and system that maintains feature points detected by a camera with a narrow viewing angle in conjunction with a Lidar sensor's wide viewing angle, involving a controller to remove feature points exceeding a set distance and add newly searched points, ensuring robustness and reducing memory usage.
Real-time Performance Optimization Strategies
Real-time performance optimization in LiDAR SLAM systems represents a critical frontier for enabling practical applications in autonomous vehicles, robotics, and mobile mapping. Current implementations often struggle with computational bottlenecks when processing dense point cloud data while maintaining accuracy requirements for loop closure and map consistency.
One effective optimization strategy involves selective downsampling of point clouds using adaptive voxel grid filters. This approach reduces computational load by decreasing point density in less feature-rich areas while maintaining higher resolution in regions with significant geometric features. Tests have shown that intelligent downsampling can reduce processing time by 30-45% with minimal impact on accuracy when properly calibrated to environmental characteristics.
Multi-threading architectures offer another powerful optimization path, separating the SLAM pipeline into parallel processes. By allocating dedicated threads for point cloud preprocessing, feature extraction, scan matching, and loop closure detection, systems can achieve better resource utilization. Modern implementations have demonstrated up to 60% improvement in processing speed through careful thread management and synchronization mechanisms that minimize data transfer overhead.
GPU acceleration represents perhaps the most transformative optimization strategy, particularly for computationally intensive operations like nearest neighbor searches and point cloud registration. CUDA-based implementations of ICP (Iterative Closest Point) algorithms have shown 5-10x performance improvements compared to CPU-only versions. Emerging research indicates that hybrid CPU-GPU architectures provide the optimal balance between processing speed and power consumption for mobile platforms.
Edge computing frameworks are increasingly being deployed to distribute computational loads across multiple devices. By offloading certain SLAM components to dedicated hardware accelerators or nearby computing nodes, real-time performance can be maintained even on resource-constrained platforms. This approach is particularly valuable for collaborative mapping scenarios where multiple agents contribute to a shared environmental model.
Algorithmic optimizations focused on early termination criteria and convergence acceleration have proven effective in reducing computational requirements. Techniques such as branch-and-bound search methods for loop closure candidates and incremental scan matching significantly reduce unnecessary computations. Recent research demonstrates that implementing adaptive convergence thresholds based on environmental complexity can reduce processing time by 15-25% without compromising mapping accuracy.
One effective optimization strategy involves selective downsampling of point clouds using adaptive voxel grid filters. This approach reduces computational load by decreasing point density in less feature-rich areas while maintaining higher resolution in regions with significant geometric features. Tests have shown that intelligent downsampling can reduce processing time by 30-45% with minimal impact on accuracy when properly calibrated to environmental characteristics.
Multi-threading architectures offer another powerful optimization path, separating the SLAM pipeline into parallel processes. By allocating dedicated threads for point cloud preprocessing, feature extraction, scan matching, and loop closure detection, systems can achieve better resource utilization. Modern implementations have demonstrated up to 60% improvement in processing speed through careful thread management and synchronization mechanisms that minimize data transfer overhead.
GPU acceleration represents perhaps the most transformative optimization strategy, particularly for computationally intensive operations like nearest neighbor searches and point cloud registration. CUDA-based implementations of ICP (Iterative Closest Point) algorithms have shown 5-10x performance improvements compared to CPU-only versions. Emerging research indicates that hybrid CPU-GPU architectures provide the optimal balance between processing speed and power consumption for mobile platforms.
Edge computing frameworks are increasingly being deployed to distribute computational loads across multiple devices. By offloading certain SLAM components to dedicated hardware accelerators or nearby computing nodes, real-time performance can be maintained even on resource-constrained platforms. This approach is particularly valuable for collaborative mapping scenarios where multiple agents contribute to a shared environmental model.
Algorithmic optimizations focused on early termination criteria and convergence acceleration have proven effective in reducing computational requirements. Techniques such as branch-and-bound search methods for loop closure candidates and incremental scan matching significantly reduce unnecessary computations. Recent research demonstrates that implementing adaptive convergence thresholds based on environmental complexity can reduce processing time by 15-25% without compromising mapping accuracy.
Multi-sensor Fusion Approaches
Multi-sensor fusion approaches have emerged as a critical strategy for enhancing LiDAR SLAM accuracy, particularly in addressing challenges related to loop closure, degeneracy, and map consistency. By integrating complementary sensor data, these approaches mitigate the inherent limitations of single-sensor systems and provide more robust environmental perception.
The integration of LiDAR with inertial measurement units (IMUs) represents one of the most common fusion approaches. IMUs provide high-frequency motion estimates that help maintain accuracy during rapid movements or when LiDAR data becomes sparse. This fusion is particularly valuable in scenarios where degeneracy occurs due to insufficient geometric features, such as long corridors or open spaces. The complementary nature of these sensors allows for continuous trajectory estimation even when LiDAR-only solutions would fail.
Camera-LiDAR fusion systems leverage the rich visual information from cameras alongside the precise depth measurements from LiDAR. Visual features extracted from camera images can significantly enhance loop closure detection through appearance-based matching, addressing one of the fundamental challenges in maintaining map consistency. Additionally, visual odometry can supplement LiDAR odometry in feature-poor environments, creating a more resilient localization system.
GNSS integration provides absolute positioning references that help constrain drift in SLAM systems over large areas. In outdoor environments, periodic GNSS corrections can effectively mitigate the accumulation of errors, ensuring global map consistency. Advanced fusion algorithms, such as factor graph optimization, enable seamless integration of these sporadic but accurate position fixes with continuous LiDAR measurements.
Radar-LiDAR fusion has gained attention for its performance in adverse weather conditions. While LiDAR performance degrades in rain, fog, or snow, radar maintains functionality, offering complementary information that enhances system robustness. This fusion approach is particularly valuable for autonomous vehicles and outdoor robotics applications where environmental variability presents significant challenges.
Multi-sensor fusion architectures vary from loosely-coupled systems, where sensors operate independently before integration, to tightly-coupled approaches that jointly optimize across all sensor measurements. Recent advances in deep learning have also enabled end-to-end fusion networks that learn optimal integration strategies directly from data, potentially outperforming traditional hand-crafted algorithms in complex scenarios.
The computational demands of processing multiple sensor streams present implementation challenges, necessitating efficient algorithms and hardware acceleration. Real-time performance requirements often dictate practical design choices in fusion approaches, balancing accuracy improvements against processing constraints.
The integration of LiDAR with inertial measurement units (IMUs) represents one of the most common fusion approaches. IMUs provide high-frequency motion estimates that help maintain accuracy during rapid movements or when LiDAR data becomes sparse. This fusion is particularly valuable in scenarios where degeneracy occurs due to insufficient geometric features, such as long corridors or open spaces. The complementary nature of these sensors allows for continuous trajectory estimation even when LiDAR-only solutions would fail.
Camera-LiDAR fusion systems leverage the rich visual information from cameras alongside the precise depth measurements from LiDAR. Visual features extracted from camera images can significantly enhance loop closure detection through appearance-based matching, addressing one of the fundamental challenges in maintaining map consistency. Additionally, visual odometry can supplement LiDAR odometry in feature-poor environments, creating a more resilient localization system.
GNSS integration provides absolute positioning references that help constrain drift in SLAM systems over large areas. In outdoor environments, periodic GNSS corrections can effectively mitigate the accumulation of errors, ensuring global map consistency. Advanced fusion algorithms, such as factor graph optimization, enable seamless integration of these sporadic but accurate position fixes with continuous LiDAR measurements.
Radar-LiDAR fusion has gained attention for its performance in adverse weather conditions. While LiDAR performance degrades in rain, fog, or snow, radar maintains functionality, offering complementary information that enhances system robustness. This fusion approach is particularly valuable for autonomous vehicles and outdoor robotics applications where environmental variability presents significant challenges.
Multi-sensor fusion architectures vary from loosely-coupled systems, where sensors operate independently before integration, to tightly-coupled approaches that jointly optimize across all sensor measurements. Recent advances in deep learning have also enabled end-to-end fusion networks that learn optimal integration strategies directly from data, potentially outperforming traditional hand-crafted algorithms in complex scenarios.
The computational demands of processing multiple sensor streams present implementation challenges, necessitating efficient algorithms and hardware acceleration. Real-time performance requirements often dictate practical design choices in fusion approaches, balancing accuracy improvements against processing constraints.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!