

LiDAR SLAM Large-Scale Mapping: Submaps, Pose Graphs And Memory
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
LiDAR SLAM Evolution and Objectives
LiDAR SLAM technology has evolved significantly over the past decade, transforming from experimental laboratory systems to robust solutions deployed in autonomous vehicles, robotics, and mapping applications. The evolution began with basic point cloud registration techniques in controlled environments and has progressed to sophisticated real-time systems capable of operating in dynamic, large-scale environments. Early LiDAR SLAM systems focused primarily on accuracy in small-scale scenarios, while modern implementations prioritize scalability, computational efficiency, and resilience to environmental changes.
The technological progression of LiDAR SLAM has been driven by advances in sensor technology, computational capabilities, and algorithmic innovations. First-generation systems relied heavily on iterative closest point (ICP) algorithms for scan matching, while contemporary approaches incorporate more sophisticated techniques such as Normal Distributions Transform (NDT) and feature-based methods. The integration of probabilistic frameworks has significantly improved robustness against sensor noise and environmental uncertainties.
Large-scale mapping represents a critical frontier in LiDAR SLAM development. Traditional monolithic approaches that maintain a single global map face significant challenges in terms of computational complexity, memory requirements, and error accumulation over large distances. These limitations have spurred research into hierarchical mapping structures, particularly submap-based approaches that divide the environment into manageable segments.
The objectives of modern LiDAR SLAM systems for large-scale mapping focus on several key aspects. First, achieving real-time performance while maintaining high accuracy across extensive environments. Second, developing efficient memory management strategies to handle the massive point cloud data generated during mapping operations. Third, implementing robust loop closure detection to correct accumulated drift and ensure global consistency in maps spanning large areas.
Pose graph optimization has emerged as a fundamental technique for maintaining global consistency in large-scale maps. By representing robot trajectories as graphs where nodes correspond to poses and edges represent spatial constraints, these systems can efficiently correct accumulated errors when revisiting previously mapped areas. The integration of pose graphs with submap structures allows for localized refinements without reprocessing the entire map.
Memory management represents another critical objective in large-scale LiDAR SLAM. As environments grow, the system must intelligently decide which data to keep in active memory, which to compress, and which to store for later retrieval. Dynamic memory allocation strategies that adapt to available computational resources and environmental complexity are becoming increasingly important for practical deployments.
The ultimate goal of current research is to develop LiDAR SLAM systems capable of continuous operation in unbounded environments, with consistent performance regardless of scale. This requires innovations in map representation, algorithmic efficiency, and hardware acceleration to overcome the fundamental challenges of large-scale mapping.
The technological progression of LiDAR SLAM has been driven by advances in sensor technology, computational capabilities, and algorithmic innovations. First-generation systems relied heavily on iterative closest point (ICP) algorithms for scan matching, while contemporary approaches incorporate more sophisticated techniques such as Normal Distributions Transform (NDT) and feature-based methods. The integration of probabilistic frameworks has significantly improved robustness against sensor noise and environmental uncertainties.
Large-scale mapping represents a critical frontier in LiDAR SLAM development. Traditional monolithic approaches that maintain a single global map face significant challenges in terms of computational complexity, memory requirements, and error accumulation over large distances. These limitations have spurred research into hierarchical mapping structures, particularly submap-based approaches that divide the environment into manageable segments.
The objectives of modern LiDAR SLAM systems for large-scale mapping focus on several key aspects. First, achieving real-time performance while maintaining high accuracy across extensive environments. Second, developing efficient memory management strategies to handle the massive point cloud data generated during mapping operations. Third, implementing robust loop closure detection to correct accumulated drift and ensure global consistency in maps spanning large areas.
Pose graph optimization has emerged as a fundamental technique for maintaining global consistency in large-scale maps. By representing robot trajectories as graphs where nodes correspond to poses and edges represent spatial constraints, these systems can efficiently correct accumulated errors when revisiting previously mapped areas. The integration of pose graphs with submap structures allows for localized refinements without reprocessing the entire map.
Memory management represents another critical objective in large-scale LiDAR SLAM. As environments grow, the system must intelligently decide which data to keep in active memory, which to compress, and which to store for later retrieval. Dynamic memory allocation strategies that adapt to available computational resources and environmental complexity are becoming increasingly important for practical deployments.
The ultimate goal of current research is to develop LiDAR SLAM systems capable of continuous operation in unbounded environments, with consistent performance regardless of scale. This requires innovations in map representation, algorithmic efficiency, and hardware acceleration to overcome the fundamental challenges of large-scale mapping.
Market Analysis for Large-Scale Mapping Solutions
The global market for large-scale mapping solutions utilizing LiDAR SLAM technology is experiencing robust growth, driven by increasing demand across multiple sectors. The autonomous vehicle industry represents the largest market segment, with projections indicating a compound annual growth rate of 35% through 2028. This acceleration stems from automotive manufacturers' aggressive timelines for deploying Level 4 and Level 5 autonomous driving capabilities, which require precise environmental mapping.
Industrial robotics constitutes the second-largest market segment, particularly in warehouse automation and logistics. Companies like Amazon and Alibaba have significantly increased investments in autonomous mobile robots that rely on large-scale mapping capabilities. The warehouse robotics market alone is expected to reach $27 billion by 2025, with LiDAR SLAM mapping solutions accounting for approximately 18% of this value.
Construction and infrastructure development represent rapidly growing application areas, with Building Information Modeling (BIM) increasingly incorporating large-scale mapping data. The architecture, engineering, and construction (AEC) industry's adoption of digital twin technology has created substantial demand for high-precision mapping solutions, with market penetration increasing from 12% in 2020 to an estimated 37% by 2025.
Geographically, North America currently leads the market with approximately 42% share, followed by Europe (28%) and Asia-Pacific (24%). However, the Asia-Pacific region is demonstrating the fastest growth rate, particularly in China, Japan, and South Korea, where government initiatives supporting autonomous technologies are accelerating market expansion.
Customer requirements are evolving toward solutions that offer greater computational efficiency and memory optimization. End-users increasingly demand systems capable of processing larger environments while maintaining real-time performance on standard hardware configurations. This trend is particularly evident in the consumer robotics segment, where cost constraints necessitate efficient resource utilization.
Market barriers include high implementation costs, technical complexity, and regulatory uncertainties regarding autonomous systems. Additionally, the fragmentation of standards across different industries creates integration challenges for solution providers. Despite these obstacles, the overall market trajectory remains strongly positive, with technological advancements in memory management and pose graph optimization expected to address current limitations.
Emerging business models include Software-as-a-Service (SaaS) offerings for cloud-based mapping solutions, which are gaining traction among small and medium enterprises seeking to avoid substantial upfront investments in hardware and expertise. Subscription-based models now account for approximately 23% of the market revenue, a figure expected to reach 40% by 2027.
Industrial robotics constitutes the second-largest market segment, particularly in warehouse automation and logistics. Companies like Amazon and Alibaba have significantly increased investments in autonomous mobile robots that rely on large-scale mapping capabilities. The warehouse robotics market alone is expected to reach $27 billion by 2025, with LiDAR SLAM mapping solutions accounting for approximately 18% of this value.
Construction and infrastructure development represent rapidly growing application areas, with Building Information Modeling (BIM) increasingly incorporating large-scale mapping data. The architecture, engineering, and construction (AEC) industry's adoption of digital twin technology has created substantial demand for high-precision mapping solutions, with market penetration increasing from 12% in 2020 to an estimated 37% by 2025.
Geographically, North America currently leads the market with approximately 42% share, followed by Europe (28%) and Asia-Pacific (24%). However, the Asia-Pacific region is demonstrating the fastest growth rate, particularly in China, Japan, and South Korea, where government initiatives supporting autonomous technologies are accelerating market expansion.
Customer requirements are evolving toward solutions that offer greater computational efficiency and memory optimization. End-users increasingly demand systems capable of processing larger environments while maintaining real-time performance on standard hardware configurations. This trend is particularly evident in the consumer robotics segment, where cost constraints necessitate efficient resource utilization.
Market barriers include high implementation costs, technical complexity, and regulatory uncertainties regarding autonomous systems. Additionally, the fragmentation of standards across different industries creates integration challenges for solution providers. Despite these obstacles, the overall market trajectory remains strongly positive, with technological advancements in memory management and pose graph optimization expected to address current limitations.
Emerging business models include Software-as-a-Service (SaaS) offerings for cloud-based mapping solutions, which are gaining traction among small and medium enterprises seeking to avoid substantial upfront investments in hardware and expertise. Subscription-based models now account for approximately 23% of the market revenue, a figure expected to reach 40% by 2027.
Technical Challenges in LiDAR SLAM Systems
LiDAR SLAM systems face significant technical challenges when deployed in large-scale environments. One of the primary obstacles is computational complexity, which increases exponentially with the mapping area. As the robot traverses larger spaces, the system must process and store massive point cloud data, leading to memory constraints on embedded platforms commonly used in autonomous vehicles and robots.
Data association presents another critical challenge, particularly in feature-poor or repetitive environments. When environments lack distinctive features or contain similar-looking structures, the system struggles to correctly match current observations with previously mapped areas, resulting in drift accumulation and potential mapping failures.
Loop closure detection becomes increasingly difficult in large-scale scenarios. The system must efficiently search through a growing database of previous observations to identify revisited locations. This process is computationally intensive and prone to false positives or missed detections, especially in environments with seasonal or lighting variations that alter the appearance of LiDAR scans.
Real-time performance requirements further complicate large-scale mapping. SLAM systems must maintain low latency for navigation and decision-making while handling growing computational demands. This often necessitates compromises between mapping accuracy and processing speed, particularly challenging when resources are limited.
Map management presents significant challenges as well. As maps grow, efficient data structures become essential for storing, accessing, and updating spatial information. Traditional monolithic map representations become unwieldy, necessitating hierarchical or distributed approaches that can introduce their own complexities in maintaining global consistency.
Dynamic environments pose additional difficulties for LiDAR SLAM systems. Moving objects, such as vehicles or pedestrians, can contaminate the static map representation if not properly filtered. Distinguishing between temporary and permanent changes to the environment requires sophisticated algorithms that can reason about object persistence and scene dynamics.
Sensor limitations also impact large-scale mapping performance. LiDAR sensors have finite range and resolution, creating challenges in large open spaces or environments with distant features. Additionally, adverse weather conditions like rain, snow, or fog can degrade sensor readings, reducing mapping reliability in outdoor deployments.
Integration with other sensor modalities, such as cameras or IMUs, introduces calibration and synchronization challenges that become more pronounced over extended operation periods. Maintaining accurate inter-sensor relationships is crucial for consistent mapping but requires robust calibration procedures that can adapt to environmental changes.
Data association presents another critical challenge, particularly in feature-poor or repetitive environments. When environments lack distinctive features or contain similar-looking structures, the system struggles to correctly match current observations with previously mapped areas, resulting in drift accumulation and potential mapping failures.
Loop closure detection becomes increasingly difficult in large-scale scenarios. The system must efficiently search through a growing database of previous observations to identify revisited locations. This process is computationally intensive and prone to false positives or missed detections, especially in environments with seasonal or lighting variations that alter the appearance of LiDAR scans.
Real-time performance requirements further complicate large-scale mapping. SLAM systems must maintain low latency for navigation and decision-making while handling growing computational demands. This often necessitates compromises between mapping accuracy and processing speed, particularly challenging when resources are limited.
Map management presents significant challenges as well. As maps grow, efficient data structures become essential for storing, accessing, and updating spatial information. Traditional monolithic map representations become unwieldy, necessitating hierarchical or distributed approaches that can introduce their own complexities in maintaining global consistency.
Dynamic environments pose additional difficulties for LiDAR SLAM systems. Moving objects, such as vehicles or pedestrians, can contaminate the static map representation if not properly filtered. Distinguishing between temporary and permanent changes to the environment requires sophisticated algorithms that can reason about object persistence and scene dynamics.
Sensor limitations also impact large-scale mapping performance. LiDAR sensors have finite range and resolution, creating challenges in large open spaces or environments with distant features. Additionally, adverse weather conditions like rain, snow, or fog can degrade sensor readings, reducing mapping reliability in outdoor deployments.
Integration with other sensor modalities, such as cameras or IMUs, introduces calibration and synchronization challenges that become more pronounced over extended operation periods. Maintaining accurate inter-sensor relationships is crucial for consistent mapping but requires robust calibration procedures that can adapt to environmental changes.
Current Submap and Pose Graph Implementations
01 LiDAR-based SLAM algorithms for large-scale environments
Advanced algorithms specifically designed for LiDAR-based Simultaneous Localization and Mapping (SLAM) in large-scale environments. These algorithms focus on efficient point cloud processing, feature extraction, and loop closure detection to maintain accuracy over extensive areas. They typically employ optimization techniques to reduce computational load while maintaining mapping precision across large spaces.- LiDAR-based SLAM algorithms for large-scale mapping: Various algorithms have been developed for LiDAR-based Simultaneous Localization and Mapping (SLAM) in large-scale environments. These algorithms focus on processing point cloud data from LiDAR sensors to create accurate maps while simultaneously determining the position of the device. Key techniques include point cloud registration, feature extraction, and loop closure detection to minimize drift and maintain mapping accuracy over large areas.
- Multi-sensor fusion for enhanced SLAM performance: Integrating LiDAR with other sensors such as cameras, IMUs, and GPS improves the robustness and accuracy of SLAM systems for large-scale mapping. Sensor fusion techniques combine the strengths of different sensors to overcome individual limitations, such as using visual data to complement LiDAR in feature-poor environments or using IMU data to improve trajectory estimation between LiDAR scans. This multi-modal approach enables more reliable mapping in diverse and challenging environments.
- Real-time processing and optimization techniques: Efficient algorithms and data structures enable real-time processing of LiDAR data for large-scale mapping applications. These techniques include hierarchical map representations, adaptive sampling methods, and parallel computing approaches that optimize computational resources. Real-time optimization methods such as graph-based optimization and incremental map updates allow for continuous refinement of maps while maintaining operational efficiency in resource-constrained platforms.
- Loop closure and drift correction methods: Loop closure detection and correction are essential for maintaining accuracy in large-scale LiDAR SLAM systems. These methods identify when a system revisits a previously mapped area and use this information to correct accumulated drift. Techniques include scan matching, feature-based recognition, and global optimization approaches that redistribute error throughout the map. Advanced methods incorporate machine learning for robust place recognition and topological map representations to handle large environments efficiently.
- Dynamic environment handling and semantic mapping: Advanced LiDAR SLAM systems incorporate methods for handling dynamic objects and creating semantically enriched maps. These approaches distinguish between static and moving elements in the environment, filtering out dynamic objects to improve mapping accuracy. Semantic classification techniques label different elements in the environment (buildings, vegetation, roads), enhancing the utility of maps for downstream applications such as autonomous navigation, urban planning, and infrastructure monitoring.
02 Multi-sensor fusion for enhanced mapping accuracy
Integration of LiDAR with complementary sensors such as cameras, IMUs, and GPS/GNSS to improve mapping accuracy in large-scale environments. This fusion approach compensates for individual sensor limitations, enhances feature detection, and provides robust localization even in challenging conditions. The combined data streams enable more precise 3D reconstruction and more reliable navigation across extensive areas.Expand Specific Solutions03 Real-time processing and optimization techniques
Methods for real-time processing of LiDAR data in large-scale mapping applications, including parallel computing, GPU acceleration, and efficient data structures. These techniques focus on reducing computational complexity while maintaining mapping quality, enabling systems to operate in real-time even when handling massive point cloud datasets from extensive environments.Expand Specific Solutions04 Loop closure and drift correction for large areas
Specialized techniques for detecting and correcting loop closures in large-scale environments, which is crucial for maintaining global consistency in maps. These methods address the accumulated drift problem in extended trajectories by identifying previously visited locations and optimizing the entire pose graph. Advanced approaches include semantic-assisted loop closure and hierarchical optimization strategies.Expand Specific Solutions05 Map management and representation for large-scale data
Efficient data structures and management techniques for handling the massive point cloud data generated in large-scale mapping. These include hierarchical map representations, octree-based storage, submapping approaches, and selective data retention strategies. Such methods enable practical storage, retrieval, and updating of extensive environmental maps while facilitating downstream applications like navigation and object recognition.Expand Specific Solutions
Key Industry Players and Competitive Landscape
LiDAR SLAM large-scale mapping technology is currently in a growth phase, with the market expected to expand significantly due to increasing applications in autonomous vehicles, robotics, and smart infrastructure. The global market size for LiDAR SLAM solutions is projected to reach several billion dollars by 2025. Technologically, the field is maturing rapidly with companies like Intel, Baidu, TuSimple, and Pony.ai leading innovation in submaps and pose graph optimization. Traditional automotive players (Hyundai, Kia) are competing with tech giants (Huawei, Samsung) and specialized firms (FARO, TRX Systems) to solve memory constraints and real-time processing challenges. Academic-industry partnerships with institutions like Tongji University and Beijing University of Technology are accelerating development of more efficient algorithms for large-scale environment mapping.
TuSimple, Inc.
Technical Solution: TuSimple has developed a specialized LiDAR SLAM system for large-scale mapping focused on highway environments for their autonomous trucking technology. Their approach employs a multi-layered submap architecture specifically designed for long-distance travel scenarios. The system creates a sparse feature-based representation of the environment for global consistency while maintaining dense point cloud data only for critical areas. TuSimple's implementation uses a sliding-window optimization technique that maintains a fixed number of recent submaps in active memory while summarizing older map sections into compressed landmark representations. Their pose graph optimization incorporates GPS/INS data as constraints to improve global consistency over long distances. A key innovation in their system is the predictive submap loading mechanism that anticipates which map sections will be needed based on the vehicle's trajectory, minimizing latency during high-speed operation. TuSimple also implements specialized memory management techniques that prioritize road features and drivable surface representation while discarding less relevant environmental details, enabling efficient operation on vehicle-grade computing platforms.
Strengths: Highly optimized for highway environments with excellent long-distance mapping capabilities and efficient integration with other sensor data. Their system maintains accuracy at high speeds with minimal computational overhead. Weaknesses: Specialized for structured highway environments with limited applicability to complex urban scenarios. The system prioritizes efficiency over comprehensive environmental representation.
Beijing Baidu Netcom Science & Technology Co., Ltd.
Technical Solution: Baidu has developed a comprehensive LiDAR SLAM solution for large-scale mapping called "Apollo SLAM" as part of their autonomous driving platform. Their approach addresses memory constraints through a hierarchical submap structure where the environment is divided into manageable segments that can be processed independently. Each submap maintains local consistency while a global pose graph connects these submaps to ensure overall map coherence. Baidu implements a multi-resolution octree data structure to efficiently represent point clouds, significantly reducing memory requirements while preserving critical environmental features. Their system employs loop closure detection using scan context descriptors to identify revisited areas, minimizing drift accumulation over large trajectories. For memory management, Baidu utilizes a dynamic loading/unloading mechanism that keeps only relevant submaps in active memory while storing others in disk cache, allowing for theoretically unlimited mapping areas while maintaining real-time performance on standard computing hardware.
Strengths: Highly optimized for urban environments with excellent loop closure capabilities and efficient memory management through dynamic submap loading. Their system scales well to city-sized environments while maintaining real-time performance. Weaknesses: Heavily optimized for structured environments, potentially limiting performance in unstructured or feature-poor settings. Requires significant computational resources for full functionality despite memory optimizations.
Core Technologies in Memory-Efficient SLAM
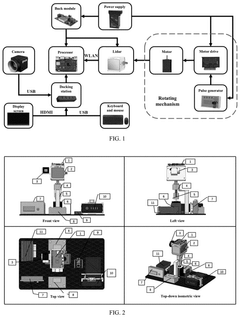
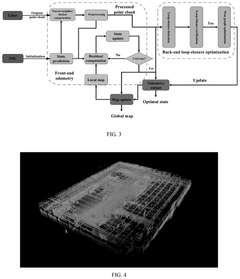
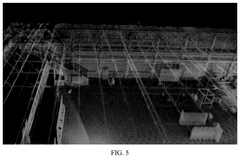
External rotation 3D lidar device and simultaneous localization and mapping (SLAM) method thereof
PatentPendingUS20250147185A1
Innovation
- An external rotation 3D lidar device and a SLAM method that combines error-state iterated Kalman filtering with pose graph optimization, enabling 360-degree environment sensing and correcting cumulative errors through loop-closure optimization.
Technologies for lidar based moving object detection
PatentWO2018119823A1
Innovation
- Development of a specialized object-detection method for lower-cost LIDAR systems that can distinguish between static and moving objects despite sensor noise and random errors.
- Creation of a computational efficient approach for LIDAR-based SLAM that reduces processing requirements compared to pixel-by-pixel comparison methods while maintaining detection accuracy.
- Integration of contextual information into LIDAR object detection to improve reliability in challenging environments where traditional methods may fail.


Real-time Performance Optimization Strategies
Real-time performance optimization is critical for LiDAR SLAM systems operating in large-scale environments. The computational demands of processing point cloud data, maintaining submaps, and managing pose graphs can easily overwhelm available resources, leading to decreased update rates and system failures. Effective optimization strategies must balance accuracy requirements with computational constraints.
Hardware acceleration represents a primary optimization avenue, with GPU implementations showing significant performance improvements for point cloud registration and feature extraction. Recent benchmarks demonstrate up to 8x speedup in ICP (Iterative Closest Point) operations when leveraging parallel processing capabilities. FPGA solutions offer lower power consumption alternatives for embedded systems, though with more complex implementation requirements.
Adaptive processing techniques dynamically adjust computational resources based on environmental complexity and system state. These include variable voxel grid resolutions that increase point cloud downsampling in feature-poor environments, and dynamic keyframe selection that reduces pose graph complexity in areas with minimal geometric variation. Studies show these approaches can maintain localization accuracy while reducing computational load by 30-45%.
Multi-threading architectures separate time-critical operations from background processes. Front-end processing (scan matching, odometry) runs at sensor frame rates, while back-end optimization (loop closure, global map refinement) operates at reduced frequencies. This separation ensures consistent real-time performance for navigation tasks while maintaining global consistency through asynchronous map updates.
Memory management strategies are particularly crucial for large-scale mapping. Techniques include spatial caching mechanisms that maintain active submaps in RAM while archiving distant areas to disk, and hierarchical map representations that store different detail levels based on spatial proximity to the current position. These approaches have demonstrated the ability to map environments exceeding 10km² while maintaining constant memory usage.
Algorithmic simplifications offer substantial performance gains with minimal accuracy impact. Scan-to-submap matching can be optimized by using probabilistic sampling methods that evaluate only the most informative points. Similarly, pose graph optimization can implement sparse matrix techniques and incremental updates rather than full batch optimization. These modifications have shown to reduce computational complexity from O(n²) to near-linear performance in practical implementations.
Edge computing architectures distribute processing across multiple nodes, with sensor-adjacent devices handling front-end operations while cloud resources manage computationally intensive back-end tasks. This hybrid approach enables real-time navigation while supporting high-fidelity mapping capabilities through asynchronous data exchange and map updates.
Hardware acceleration represents a primary optimization avenue, with GPU implementations showing significant performance improvements for point cloud registration and feature extraction. Recent benchmarks demonstrate up to 8x speedup in ICP (Iterative Closest Point) operations when leveraging parallel processing capabilities. FPGA solutions offer lower power consumption alternatives for embedded systems, though with more complex implementation requirements.
Adaptive processing techniques dynamically adjust computational resources based on environmental complexity and system state. These include variable voxel grid resolutions that increase point cloud downsampling in feature-poor environments, and dynamic keyframe selection that reduces pose graph complexity in areas with minimal geometric variation. Studies show these approaches can maintain localization accuracy while reducing computational load by 30-45%.
Multi-threading architectures separate time-critical operations from background processes. Front-end processing (scan matching, odometry) runs at sensor frame rates, while back-end optimization (loop closure, global map refinement) operates at reduced frequencies. This separation ensures consistent real-time performance for navigation tasks while maintaining global consistency through asynchronous map updates.
Memory management strategies are particularly crucial for large-scale mapping. Techniques include spatial caching mechanisms that maintain active submaps in RAM while archiving distant areas to disk, and hierarchical map representations that store different detail levels based on spatial proximity to the current position. These approaches have demonstrated the ability to map environments exceeding 10km² while maintaining constant memory usage.
Algorithmic simplifications offer substantial performance gains with minimal accuracy impact. Scan-to-submap matching can be optimized by using probabilistic sampling methods that evaluate only the most informative points. Similarly, pose graph optimization can implement sparse matrix techniques and incremental updates rather than full batch optimization. These modifications have shown to reduce computational complexity from O(n²) to near-linear performance in practical implementations.
Edge computing architectures distribute processing across multiple nodes, with sensor-adjacent devices handling front-end operations while cloud resources manage computationally intensive back-end tasks. This hybrid approach enables real-time navigation while supporting high-fidelity mapping capabilities through asynchronous data exchange and map updates.
Integration with Other Sensor Modalities
The integration of LiDAR SLAM with complementary sensor modalities represents a critical advancement in large-scale mapping systems. Fusion with cameras enables semantic understanding of environments, where RGB data provides color and texture information that LiDAR alone cannot capture. This visual-LiDAR integration facilitates object recognition and scene understanding, enhancing the system's ability to identify landmarks and distinguish between similar structural features based on appearance.
Inertial Measurement Units (IMUs) significantly improve the robustness of LiDAR SLAM by providing high-frequency motion estimates between LiDAR scans. This integration is particularly valuable in dynamic environments or during rapid movements where scan matching alone might fail. IMU data helps maintain tracking continuity during temporary LiDAR occlusions or in feature-poor environments, addressing one of the fundamental limitations of pure LiDAR systems.
GPS/GNSS integration enables global positioning corrections, mitigating drift accumulation in large-scale mapping operations. In outdoor environments, this fusion creates globally consistent maps by periodically anchoring the SLAM solution to absolute coordinates. Advanced implementations employ adaptive fusion algorithms that weight sensor contributions based on estimated reliability, prioritizing GPS in open areas while favoring LiDAR-inertial solutions in GPS-denied environments.
Radar sensors complement LiDAR by offering superior performance in adverse weather conditions such as fog, rain, or snow where LiDAR effectiveness diminishes. The fusion of these modalities creates all-weather mapping capabilities, crucial for autonomous vehicle applications requiring operational reliability across diverse environmental conditions.
Multi-sensor integration presents significant computational challenges, particularly in managing varying data rates, synchronization issues, and calibration requirements. Modern approaches employ probabilistic frameworks like factor graphs to represent multi-sensor constraints, allowing flexible integration of heterogeneous data sources while maintaining computational efficiency. Edge computing architectures are increasingly deployed to distribute processing loads, enabling real-time performance even with rich sensor suites.
Calibration remains a critical challenge in sensor fusion implementations. Recent advances in online calibration techniques allow systems to continuously refine inter-sensor transformations during operation, reducing dependency on precise initial calibration procedures and accommodating subtle changes in sensor alignment over time.
Inertial Measurement Units (IMUs) significantly improve the robustness of LiDAR SLAM by providing high-frequency motion estimates between LiDAR scans. This integration is particularly valuable in dynamic environments or during rapid movements where scan matching alone might fail. IMU data helps maintain tracking continuity during temporary LiDAR occlusions or in feature-poor environments, addressing one of the fundamental limitations of pure LiDAR systems.
GPS/GNSS integration enables global positioning corrections, mitigating drift accumulation in large-scale mapping operations. In outdoor environments, this fusion creates globally consistent maps by periodically anchoring the SLAM solution to absolute coordinates. Advanced implementations employ adaptive fusion algorithms that weight sensor contributions based on estimated reliability, prioritizing GPS in open areas while favoring LiDAR-inertial solutions in GPS-denied environments.
Radar sensors complement LiDAR by offering superior performance in adverse weather conditions such as fog, rain, or snow where LiDAR effectiveness diminishes. The fusion of these modalities creates all-weather mapping capabilities, crucial for autonomous vehicle applications requiring operational reliability across diverse environmental conditions.
Multi-sensor integration presents significant computational challenges, particularly in managing varying data rates, synchronization issues, and calibration requirements. Modern approaches employ probabilistic frameworks like factor graphs to represent multi-sensor constraints, allowing flexible integration of heterogeneous data sources while maintaining computational efficiency. Edge computing architectures are increasingly deployed to distribute processing loads, enabling real-time performance even with rich sensor suites.
Calibration remains a critical challenge in sensor fusion implementations. Recent advances in online calibration techniques allow systems to continuously refine inter-sensor transformations during operation, reducing dependency on precise initial calibration procedures and accommodating subtle changes in sensor alignment over time.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!