LiDAR SLAM Real-Time Constraints: Computation Budgets, Latency And QoS
SEP 19, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
LiDAR SLAM Evolution and Objectives
LiDAR SLAM technology has evolved significantly over the past two decades, transforming from experimental laboratory systems to commercial applications in autonomous vehicles, robotics, and mapping. The evolution began with early 2D LiDAR systems in the early 2000s, which provided limited environmental perception but established foundational algorithms for simultaneous localization and mapping. The introduction of 3D LiDAR sensors around 2010 marked a pivotal advancement, enabling more comprehensive environmental modeling and improved localization accuracy.
The technological progression of LiDAR SLAM has been characterized by increasing sensor resolution, expanded field of view, and enhanced processing capabilities. Early systems operated at 5-10 Hz with centimeter-level accuracy, while modern implementations achieve 20-30 Hz operation with millimeter precision. This evolution reflects the growing demands for real-time performance in dynamic environments, particularly for autonomous navigation applications.
Real-time constraints represent the central challenge in contemporary LiDAR SLAM development. These systems must process massive point cloud data streams—often exceeding millions of points per second—while maintaining strict latency requirements. For autonomous vehicles, processing latency typically must remain below 100ms to ensure safe operation at highway speeds. Similarly, robotic applications demand consistent frame rates to maintain stable control loops.
Computation budgets impose significant limitations on LiDAR SLAM implementations. Edge computing platforms in autonomous vehicles and robots have restricted power envelopes, typically 15-50W for the entire perception stack. This necessitates algorithmic optimizations, hardware acceleration, and careful resource allocation to balance performance with energy efficiency. The trend toward embedded implementations has driven research into lightweight algorithms and specialized hardware accelerators.
Quality of Service (QoS) considerations have become increasingly important as LiDAR SLAM transitions from research to production environments. Modern systems must maintain consistent performance across varying environmental conditions, including adverse weather, changing lighting, and diverse terrain. QoS metrics encompass accuracy, precision, robustness to sensor degradation, and graceful performance degradation when computational resources are constrained.
The objectives of current LiDAR SLAM research focus on addressing these real-time constraints while expanding functionality. Key goals include reducing computational complexity through sparse processing techniques, implementing adaptive resource allocation based on environmental complexity, and developing fault-tolerant architectures that maintain critical functionality during partial system failures. Additionally, there is significant interest in multi-modal fusion approaches that combine LiDAR with cameras and radar to enhance robustness while distributing computational load.
The technological progression of LiDAR SLAM has been characterized by increasing sensor resolution, expanded field of view, and enhanced processing capabilities. Early systems operated at 5-10 Hz with centimeter-level accuracy, while modern implementations achieve 20-30 Hz operation with millimeter precision. This evolution reflects the growing demands for real-time performance in dynamic environments, particularly for autonomous navigation applications.
Real-time constraints represent the central challenge in contemporary LiDAR SLAM development. These systems must process massive point cloud data streams—often exceeding millions of points per second—while maintaining strict latency requirements. For autonomous vehicles, processing latency typically must remain below 100ms to ensure safe operation at highway speeds. Similarly, robotic applications demand consistent frame rates to maintain stable control loops.
Computation budgets impose significant limitations on LiDAR SLAM implementations. Edge computing platforms in autonomous vehicles and robots have restricted power envelopes, typically 15-50W for the entire perception stack. This necessitates algorithmic optimizations, hardware acceleration, and careful resource allocation to balance performance with energy efficiency. The trend toward embedded implementations has driven research into lightweight algorithms and specialized hardware accelerators.
Quality of Service (QoS) considerations have become increasingly important as LiDAR SLAM transitions from research to production environments. Modern systems must maintain consistent performance across varying environmental conditions, including adverse weather, changing lighting, and diverse terrain. QoS metrics encompass accuracy, precision, robustness to sensor degradation, and graceful performance degradation when computational resources are constrained.
The objectives of current LiDAR SLAM research focus on addressing these real-time constraints while expanding functionality. Key goals include reducing computational complexity through sparse processing techniques, implementing adaptive resource allocation based on environmental complexity, and developing fault-tolerant architectures that maintain critical functionality during partial system failures. Additionally, there is significant interest in multi-modal fusion approaches that combine LiDAR with cameras and radar to enhance robustness while distributing computational load.
Market Analysis for Real-Time LiDAR SLAM Applications
The real-time LiDAR SLAM market is experiencing significant growth, driven by the expanding applications in autonomous vehicles, robotics, and augmented reality. Current market valuations place the global LiDAR SLAM technology sector at approximately $2.1 billion, with projections indicating a compound annual growth rate of 21.6% through 2028.
Autonomous vehicles represent the largest market segment, accounting for nearly 45% of the total market share. This dominance stems from the critical need for precise real-time mapping and localization capabilities in self-driving technology. Major automotive manufacturers and technology companies are investing heavily in this area, recognizing that reliable real-time SLAM is a fundamental requirement for achieving higher levels of autonomy.
The robotics sector constitutes the second-largest market segment at 28%, with applications spanning industrial automation, warehouse logistics, and service robots. Companies like Boston Dynamics, Amazon Robotics, and numerous startups are implementing real-time LiDAR SLAM solutions to enhance robot navigation capabilities in dynamic environments.
Consumer electronics and AR/VR applications represent an emerging but rapidly growing segment, currently at 15% of the market. As spatial computing becomes more mainstream, the demand for efficient SLAM algorithms that can operate within the computational constraints of wearable devices is increasing substantially.
Market research indicates that computational efficiency is becoming a primary differentiator among competing solutions. End-users across all segments are prioritizing SLAM systems that can deliver high accuracy while operating within strict power and processing limitations. A recent industry survey revealed that 76% of potential adopters consider real-time performance under computational constraints as a "critical" or "very important" factor in their purchasing decisions.
Latency requirements vary significantly across applications. Autonomous vehicles typically demand end-to-end processing times below 50ms, while industrial robotics can often tolerate latencies up to 100ms. This variation creates market opportunities for specialized solutions tailored to specific use cases and computational budgets.
Quality of Service (QoS) guarantees are becoming increasingly important market differentiators. Systems that can maintain consistent performance under varying conditions (lighting, weather, object density) command premium pricing, with customers willing to pay 30-40% more for solutions with proven reliability metrics.
Regional analysis shows North America leading with 38% market share, followed by Asia-Pacific at 34% and Europe at 24%. However, the Asia-Pacific region is experiencing the fastest growth rate at 24.3% annually, driven by rapid adoption in manufacturing automation and smart city initiatives in China, Japan, and South Korea.
Autonomous vehicles represent the largest market segment, accounting for nearly 45% of the total market share. This dominance stems from the critical need for precise real-time mapping and localization capabilities in self-driving technology. Major automotive manufacturers and technology companies are investing heavily in this area, recognizing that reliable real-time SLAM is a fundamental requirement for achieving higher levels of autonomy.
The robotics sector constitutes the second-largest market segment at 28%, with applications spanning industrial automation, warehouse logistics, and service robots. Companies like Boston Dynamics, Amazon Robotics, and numerous startups are implementing real-time LiDAR SLAM solutions to enhance robot navigation capabilities in dynamic environments.
Consumer electronics and AR/VR applications represent an emerging but rapidly growing segment, currently at 15% of the market. As spatial computing becomes more mainstream, the demand for efficient SLAM algorithms that can operate within the computational constraints of wearable devices is increasing substantially.
Market research indicates that computational efficiency is becoming a primary differentiator among competing solutions. End-users across all segments are prioritizing SLAM systems that can deliver high accuracy while operating within strict power and processing limitations. A recent industry survey revealed that 76% of potential adopters consider real-time performance under computational constraints as a "critical" or "very important" factor in their purchasing decisions.
Latency requirements vary significantly across applications. Autonomous vehicles typically demand end-to-end processing times below 50ms, while industrial robotics can often tolerate latencies up to 100ms. This variation creates market opportunities for specialized solutions tailored to specific use cases and computational budgets.
Quality of Service (QoS) guarantees are becoming increasingly important market differentiators. Systems that can maintain consistent performance under varying conditions (lighting, weather, object density) command premium pricing, with customers willing to pay 30-40% more for solutions with proven reliability metrics.
Regional analysis shows North America leading with 38% market share, followed by Asia-Pacific at 34% and Europe at 24%. However, the Asia-Pacific region is experiencing the fastest growth rate at 24.3% annually, driven by rapid adoption in manufacturing automation and smart city initiatives in China, Japan, and South Korea.
Technical Constraints and Challenges in LiDAR SLAM
LiDAR SLAM systems face significant technical constraints that directly impact their real-time performance in autonomous vehicles, robotics, and other mobile applications. The primary challenge lies in the computational complexity of processing dense point cloud data, which typically contains millions of points per second. This massive data volume requires substantial processing power, creating a fundamental tension between accuracy and real-time operation.
Computational budget constraints represent a critical limitation, particularly in embedded systems and mobile platforms where power consumption and heat dissipation are concerns. High-end LiDAR sensors can generate up to 2 million points per second, requiring efficient algorithms for point cloud registration, feature extraction, and loop closure detection. Current hardware accelerators like GPUs and FPGAs offer partial solutions but introduce additional system complexity and power requirements.
Latency presents another significant challenge, as effective SLAM systems must maintain low end-to-end processing delays. The acceptable latency threshold varies by application—autonomous vehicles require processing times under 100ms for safe operation, while some robotic applications can tolerate up to 200ms. This constraint forces developers to make difficult trade-offs between algorithmic complexity and processing speed.
Quality of Service (QoS) requirements further complicate LiDAR SLAM implementation. Systems must maintain consistent performance across varying environmental conditions, including different lighting, weather, and dynamic object scenarios. Degradation in point cloud quality due to environmental factors like rain, fog, or reflective surfaces can significantly impact SLAM reliability, necessitating robust fallback mechanisms.
Memory constraints also pose challenges, particularly for large-scale mapping operations. Building and maintaining detailed environmental maps requires substantial memory resources, which must be carefully managed to prevent system slowdowns or failures. Efficient data structures and map compression techniques become essential for long-term operation.
The integration of LiDAR SLAM with other sensor modalities (sensor fusion) introduces additional computational overhead while attempting to improve overall system robustness. Fusing data from cameras, IMUs, and other sensors requires precise time synchronization and calibration, adding complexity to real-time processing pipelines.
Energy efficiency represents a growing concern, especially for battery-powered autonomous systems. High-performance computing hardware necessary for real-time SLAM processing can rapidly deplete energy resources, limiting operational duration. This constraint drives research toward more energy-efficient algorithms and specialized hardware solutions optimized specifically for LiDAR data processing.
Computational budget constraints represent a critical limitation, particularly in embedded systems and mobile platforms where power consumption and heat dissipation are concerns. High-end LiDAR sensors can generate up to 2 million points per second, requiring efficient algorithms for point cloud registration, feature extraction, and loop closure detection. Current hardware accelerators like GPUs and FPGAs offer partial solutions but introduce additional system complexity and power requirements.
Latency presents another significant challenge, as effective SLAM systems must maintain low end-to-end processing delays. The acceptable latency threshold varies by application—autonomous vehicles require processing times under 100ms for safe operation, while some robotic applications can tolerate up to 200ms. This constraint forces developers to make difficult trade-offs between algorithmic complexity and processing speed.
Quality of Service (QoS) requirements further complicate LiDAR SLAM implementation. Systems must maintain consistent performance across varying environmental conditions, including different lighting, weather, and dynamic object scenarios. Degradation in point cloud quality due to environmental factors like rain, fog, or reflective surfaces can significantly impact SLAM reliability, necessitating robust fallback mechanisms.
Memory constraints also pose challenges, particularly for large-scale mapping operations. Building and maintaining detailed environmental maps requires substantial memory resources, which must be carefully managed to prevent system slowdowns or failures. Efficient data structures and map compression techniques become essential for long-term operation.
The integration of LiDAR SLAM with other sensor modalities (sensor fusion) introduces additional computational overhead while attempting to improve overall system robustness. Fusing data from cameras, IMUs, and other sensors requires precise time synchronization and calibration, adding complexity to real-time processing pipelines.
Energy efficiency represents a growing concern, especially for battery-powered autonomous systems. High-performance computing hardware necessary for real-time SLAM processing can rapidly deplete energy resources, limiting operational duration. This constraint drives research toward more energy-efficient algorithms and specialized hardware solutions optimized specifically for LiDAR data processing.
Current Real-Time Optimization Approaches
01 Computational resource allocation for LiDAR SLAM systems
LiDAR SLAM systems require efficient allocation of computational resources to maintain real-time performance. This involves optimizing the distribution of processing power between different SLAM components such as point cloud registration, loop closure detection, and map optimization. Dynamic resource allocation strategies can adjust computational budgets based on the complexity of the environment and the available hardware resources, ensuring optimal performance under varying conditions.- Computational resource allocation for LiDAR SLAM: Efficient allocation of computational resources is critical for LiDAR SLAM systems to operate within budget constraints. This involves optimizing algorithms to balance processing power requirements with performance needs, implementing dynamic resource allocation based on environmental complexity, and utilizing hardware acceleration techniques. These approaches help manage computational budgets while maintaining acceptable SLAM performance in resource-constrained environments such as autonomous vehicles and mobile robots.
- Latency reduction techniques in LiDAR SLAM processing: Minimizing latency in LiDAR SLAM systems is essential for real-time applications. Techniques include parallel processing of point cloud data, predictive algorithms that anticipate sensor movements, optimized data structures for faster access, and incremental mapping approaches that update only changed portions of the environment. These methods reduce the time between data acquisition and map generation, enabling more responsive navigation and obstacle avoidance in dynamic environments.
- Quality of Service (QoS) management for LiDAR SLAM systems: QoS management frameworks ensure reliable performance of LiDAR SLAM under varying conditions. These frameworks include adaptive parameter tuning based on environmental factors, service level agreements for processing time guarantees, degradation strategies that maintain core functionality under resource constraints, and performance monitoring systems that detect and respond to quality issues. QoS management enables SLAM systems to provide consistent mapping and localization services across different operational scenarios.
- Edge computing architectures for distributed LiDAR SLAM: Edge computing architectures distribute SLAM processing across local and remote resources to optimize performance. These architectures include edge nodes for initial point cloud processing, cloud servers for computationally intensive tasks, fog computing layers for intermediate processing, and intelligent workload distribution systems. By processing data closer to where it's generated, these architectures reduce bandwidth requirements and latency while enabling more complex SLAM algorithms to run within computational constraints.
- Hardware-software co-design for optimized LiDAR SLAM: Hardware-software co-design approaches create specialized systems that maximize SLAM efficiency. These include custom FPGA implementations for parallel point cloud processing, ASIC designs optimized for specific SLAM algorithms, GPU acceleration for computationally intensive operations, and heterogeneous computing platforms that match tasks to appropriate processors. By tightly integrating hardware and software development, these approaches achieve significant improvements in processing speed, power efficiency, and overall system performance.
02 Latency reduction techniques in LiDAR SLAM processing
Minimizing latency is critical for real-time LiDAR SLAM applications, especially in autonomous vehicles and robotics. Techniques include parallel processing of SLAM components, hardware acceleration using GPUs or FPGAs, and algorithmic optimizations such as sparse point cloud processing and incremental map updates. These approaches help reduce the time delay between sensor data acquisition and the availability of localization and mapping results, enabling more responsive system behavior.Expand Specific Solutions03 Quality of Service (QoS) management for LiDAR SLAM
QoS management in LiDAR SLAM involves maintaining consistent performance levels while adapting to changing conditions. This includes implementing service level agreements for processing time, accuracy, and reliability. Adaptive algorithms can dynamically adjust parameters based on QoS requirements, prioritizing critical tasks during resource constraints. QoS frameworks may include monitoring mechanisms to detect performance degradation and trigger appropriate mitigation strategies.Expand Specific Solutions04 Edge computing architectures for distributed LiDAR SLAM
Edge computing architectures distribute SLAM computational workloads between local devices and edge servers to optimize performance and resource utilization. These architectures enable offloading of computationally intensive tasks while maintaining low latency for critical operations. The distribution strategy considers factors such as available bandwidth, processing capabilities of edge nodes, and real-time requirements. This approach is particularly beneficial for resource-constrained mobile platforms that require high-performance SLAM capabilities.Expand Specific Solutions05 Adaptive SLAM algorithms for resource-constrained environments
Adaptive SLAM algorithms dynamically adjust their computational complexity based on available resources and environmental conditions. These algorithms can switch between different processing modes, such as high-accuracy but computationally intensive methods versus faster but less precise approaches. Feature selection techniques reduce the computational burden by focusing on the most informative environmental elements. These adaptive approaches enable LiDAR SLAM to operate effectively across a wide range of hardware platforms with varying computational capabilities.Expand Specific Solutions
Key Industry Players and Competitive Landscape
LiDAR SLAM for real-time applications is currently in a growth phase, with the market expanding rapidly due to increasing demand in autonomous vehicles, robotics, and smart infrastructure. The technology is approaching maturity but still faces challenges in balancing computational efficiency with accuracy under real-time constraints. Huawei leads commercial applications with advanced hardware-software integration, while academic institutions like Shenzhen University and Beijing University of Technology contribute significant research on optimization algorithms. Companies including StradVision, Benewake, and SIASUN are developing specialized solutions for industry-specific applications. The competitive landscape is characterized by a mix of established tech giants and specialized startups focusing on reducing latency while maintaining quality of service within tight computation budgets.
Huawei Technologies Co., Ltd.
Technical Solution: Huawei has developed a comprehensive LiDAR SLAM solution that addresses real-time constraints through a multi-layered optimization approach. Their system employs a hierarchical processing architecture that separates time-critical operations from background optimization tasks. For front-end processing, Huawei implements point cloud downsampling and feature extraction using FPGA acceleration to achieve sub-10ms latency for scan registration. The back-end optimization utilizes a sparse pose graph structure with keyframe selection based on information gain metrics, reducing computational overhead while maintaining mapping accuracy. Huawei's solution incorporates adaptive resource allocation that dynamically adjusts computational resources based on environmental complexity and available processing power. Their system includes a Quality of Service (QoS) manager that prioritizes critical path operations during resource constraints, ensuring consistent localization performance even when mapping quality might be temporarily reduced. Huawei has also implemented specialized hardware acceleration for point cloud processing using their Ascend AI chips, achieving up to 3x performance improvement compared to CPU-only implementations.
Strengths: Huawei's solution benefits from tight hardware-software integration with custom silicon accelerators, providing significant performance advantages in resource-constrained environments. Their adaptive QoS system ensures reliable operation across varying conditions. Weaknesses: The solution may have higher implementation complexity and hardware dependencies compared to more standardized approaches, potentially limiting deployment flexibility on third-party platforms.
Benewake (Beijing) Co., Ltd.
Technical Solution: Benewake has developed a specialized LiDAR SLAM solution focused on embedded systems with strict computational constraints. Their approach centers on a lightweight SLAM framework that prioritizes essential processing while maintaining real-time performance. Benewake's system employs a scan-to-submap matching technique that reduces the computational burden by selectively updating only relevant portions of the global map. Their implementation features a multi-resolution occupancy grid that allocates higher resolution to nearby areas while using coarser representations for distant regions, optimizing memory usage and processing requirements. For real-time operation, Benewake has developed a predictive motion model that reduces the search space for scan matching, achieving registration times under 15ms on embedded processors. The system incorporates an adaptive feature extraction pipeline that adjusts the density of extracted features based on available computational resources and environmental complexity. Benewake's solution includes a latency-aware planning module that compensates for processing delays by predicting future states, ensuring responsive control even under varying computational loads. Their implementation achieves consistent 20Hz operation on embedded platforms with power consumption under 10W.
Strengths: Benewake's solution is highly optimized for resource-constrained embedded systems, making it suitable for deployment on autonomous mobile robots and drones with limited computing capabilities. Their adaptive feature extraction provides good balance between accuracy and performance. Weaknesses: The focus on computational efficiency may result in reduced mapping accuracy in complex environments compared to more computationally intensive approaches, particularly in feature-poor settings.
Core Algorithms and Computational Efficiency Research
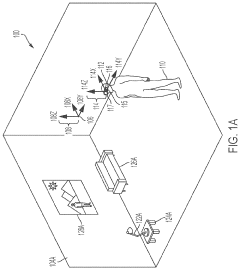
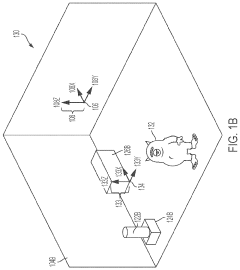
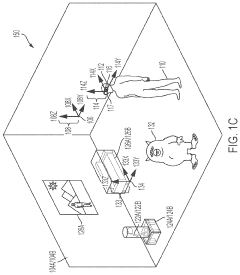
Lidar simultaneous localization and mapping
PatentPendingUS20240062403A1
Innovation
- A planar LiDAR SLAM framework that performs planar bundle adjustment (PBA) to jointly optimize plane parameters and sensor poses, distinguishing between the two sides of a planar object by the direction of the vector normal and using an approximate rotation matrix for efficient localization and mapping, and forming an integral point-to-plane cost to reduce computational costs.
A local real-time relocalization method for SLAM based on sliding window
PatentActiveCN114821280B
Innovation
- The SLAM local real-time relocation method based on sliding window is used to extract and track image features, calculate image clarity and similarity, dynamically maintain the sliding window, filter key frames, and use perceptual hashing operators and grayscale histograms to detect image similarity. property, select the frame most similar to the current frame as the relocation candidate frame, and achieve local real-time relocation by matching again.




Hardware-Software Co-Design Strategies
Hardware-Software Co-Design Strategies for LiDAR SLAM systems represent a critical approach to meeting real-time constraints while optimizing performance. These strategies involve the simultaneous design of hardware components and software algorithms to create synergistic solutions that maximize efficiency. By considering both aspects together rather than in isolation, developers can achieve significant improvements in computational efficiency, latency reduction, and quality of service.
The co-design process typically begins with workload characterization, where computational bottlenecks in the SLAM pipeline are identified through profiling. This analysis reveals which operations consume the most resources and where parallelization opportunities exist. Common bottlenecks include point cloud registration, loop closure detection, and map optimization, which can benefit from specialized hardware acceleration.
FPGA-based solutions have emerged as powerful tools for LiDAR SLAM acceleration, offering reconfigurable computing fabrics that can be tailored to specific algorithmic needs. These implementations can achieve 5-10x speedups for point cloud processing operations compared to CPU-only solutions, while maintaining power efficiency advantages. GPU acceleration represents another viable pathway, particularly effective for parallel operations like feature extraction and point cloud registration, delivering up to 20x performance improvements for these specific tasks.
Custom ASIC designs, though requiring significant development investment, provide the ultimate performance-per-watt solution for production-scale deployments. Companies like Tesla and Waymo have developed proprietary silicon specifically optimized for their autonomous driving perception stacks, including LiDAR SLAM components.
On the software side, algorithmic optimizations must be designed with hardware capabilities in mind. Techniques such as sparse computation (processing only the most informative points), incremental updates (avoiding full recalculations), and multi-resolution approaches (processing different areas at different detail levels) can dramatically reduce computational requirements when properly matched to hardware capabilities.
Dynamic resource allocation represents an emerging trend, where the system adaptively adjusts computational resources based on environmental complexity and available processing power. For example, in feature-rich environments requiring detailed mapping, more resources can be allocated to loop closure detection, while in simpler scenarios, these resources can be redirected to other tasks or power-saving modes.
Effective co-design strategies also incorporate hardware-aware algorithm selection, where multiple algorithmic approaches are implemented and dynamically selected based on available computational resources and current performance requirements. This adaptive approach ensures optimal performance across varying operational conditions while maintaining real-time constraints.
The co-design process typically begins with workload characterization, where computational bottlenecks in the SLAM pipeline are identified through profiling. This analysis reveals which operations consume the most resources and where parallelization opportunities exist. Common bottlenecks include point cloud registration, loop closure detection, and map optimization, which can benefit from specialized hardware acceleration.
FPGA-based solutions have emerged as powerful tools for LiDAR SLAM acceleration, offering reconfigurable computing fabrics that can be tailored to specific algorithmic needs. These implementations can achieve 5-10x speedups for point cloud processing operations compared to CPU-only solutions, while maintaining power efficiency advantages. GPU acceleration represents another viable pathway, particularly effective for parallel operations like feature extraction and point cloud registration, delivering up to 20x performance improvements for these specific tasks.
Custom ASIC designs, though requiring significant development investment, provide the ultimate performance-per-watt solution for production-scale deployments. Companies like Tesla and Waymo have developed proprietary silicon specifically optimized for their autonomous driving perception stacks, including LiDAR SLAM components.
On the software side, algorithmic optimizations must be designed with hardware capabilities in mind. Techniques such as sparse computation (processing only the most informative points), incremental updates (avoiding full recalculations), and multi-resolution approaches (processing different areas at different detail levels) can dramatically reduce computational requirements when properly matched to hardware capabilities.
Dynamic resource allocation represents an emerging trend, where the system adaptively adjusts computational resources based on environmental complexity and available processing power. For example, in feature-rich environments requiring detailed mapping, more resources can be allocated to loop closure detection, while in simpler scenarios, these resources can be redirected to other tasks or power-saving modes.
Effective co-design strategies also incorporate hardware-aware algorithm selection, where multiple algorithmic approaches are implemented and dynamically selected based on available computational resources and current performance requirements. This adaptive approach ensures optimal performance across varying operational conditions while maintaining real-time constraints.
QoS Metrics and Performance Evaluation Frameworks
Quality of Service (QoS) metrics for LiDAR SLAM systems must be carefully defined and measured to ensure reliable operation under real-time constraints. These metrics typically include accuracy, precision, computational efficiency, latency, and robustness. Accuracy refers to how closely the estimated pose matches ground truth, while precision measures the consistency of these estimates across multiple runs.
Computational efficiency metrics evaluate resource utilization, including CPU/GPU usage, memory consumption, and power efficiency. These metrics are particularly critical for embedded systems with limited resources, such as autonomous vehicles or drones utilizing LiDAR SLAM.
Latency metrics measure time delays between data acquisition and pose estimation, with end-to-end latency being a crucial factor for real-time applications. For LiDAR SLAM systems, this includes sensor data acquisition time, point cloud preprocessing time, feature extraction time, and optimization time.
Robustness metrics assess system performance under challenging conditions, including environmental variations, sensor noise, dynamic objects, and hardware failures. Mean time between failures (MTBF) and recovery time are essential metrics for mission-critical applications.
Performance evaluation frameworks for LiDAR SLAM typically include standardized datasets, simulation environments, and benchmarking tools. The KITTI dataset, Oxford RobotCar dataset, and Newer College dataset provide real-world data for comparative evaluation. These datasets include ground truth trajectories obtained from high-precision GPS/INS systems.
Simulation environments like Gazebo, CARLA, and NVIDIA Isaac Sim offer controlled testing conditions where parameters can be systematically varied to assess system performance under different scenarios. These environments allow for reproducible testing and evaluation of edge cases that might be difficult to capture in real-world datasets.
Benchmarking tools such as EVO, RPG Evaluation, and SLAMBench provide standardized methods for comparing different SLAM implementations. These tools calculate metrics like Absolute Trajectory Error (ATE), Relative Pose Error (RPE), and computational resource usage, enabling fair comparisons between different algorithms.
The development of comprehensive QoS metrics and evaluation frameworks is essential for advancing LiDAR SLAM technology toward more reliable real-time operation across diverse application domains, from autonomous vehicles to mobile robotics and augmented reality systems.
Computational efficiency metrics evaluate resource utilization, including CPU/GPU usage, memory consumption, and power efficiency. These metrics are particularly critical for embedded systems with limited resources, such as autonomous vehicles or drones utilizing LiDAR SLAM.
Latency metrics measure time delays between data acquisition and pose estimation, with end-to-end latency being a crucial factor for real-time applications. For LiDAR SLAM systems, this includes sensor data acquisition time, point cloud preprocessing time, feature extraction time, and optimization time.
Robustness metrics assess system performance under challenging conditions, including environmental variations, sensor noise, dynamic objects, and hardware failures. Mean time between failures (MTBF) and recovery time are essential metrics for mission-critical applications.
Performance evaluation frameworks for LiDAR SLAM typically include standardized datasets, simulation environments, and benchmarking tools. The KITTI dataset, Oxford RobotCar dataset, and Newer College dataset provide real-world data for comparative evaluation. These datasets include ground truth trajectories obtained from high-precision GPS/INS systems.
Simulation environments like Gazebo, CARLA, and NVIDIA Isaac Sim offer controlled testing conditions where parameters can be systematically varied to assess system performance under different scenarios. These environments allow for reproducible testing and evaluation of edge cases that might be difficult to capture in real-world datasets.
Benchmarking tools such as EVO, RPG Evaluation, and SLAMBench provide standardized methods for comparing different SLAM implementations. These tools calculate metrics like Absolute Trajectory Error (ATE), Relative Pose Error (RPE), and computational resource usage, enabling fair comparisons between different algorithms.
The development of comprehensive QoS metrics and evaluation frameworks is essential for advancing LiDAR SLAM technology toward more reliable real-time operation across diverse application domains, from autonomous vehicles to mobile robotics and augmented reality systems.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!