How To Verify Navigation Accuracy Of Nanorobots In Animal Models
AUG 21, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Nanorobot Navigation Verification Goals
The primary goal of nanorobot navigation verification in animal models is to assess and validate the accuracy, precision, and reliability of nanorobots' movement and targeting capabilities within living biological systems. This objective is crucial for advancing the field of nanorobotics and its potential applications in medicine, particularly in targeted drug delivery and minimally invasive diagnostics.
One key aspect of this verification process is to develop and implement robust tracking methods that can accurately monitor the position and trajectory of nanorobots in real-time within the complex and dynamic environment of animal bodies. This may involve the integration of advanced imaging techniques, such as fluorescence microscopy, magnetic resonance imaging (MRI), or positron emission tomography (PET), with sophisticated data analysis algorithms to provide high-resolution, three-dimensional tracking of nanorobots.
Another important goal is to establish standardized protocols and benchmarks for evaluating navigation performance across different nanorobot designs and animal models. This standardization is essential for comparing results between studies and accelerating the development of more effective navigation systems. Researchers aim to define metrics such as targeting accuracy, navigation speed, and the ability to overcome biological barriers, which can be consistently measured and reported.
Furthermore, the verification process seeks to assess the nanorobots' ability to adapt to and navigate through various physiological conditions encountered in animal models. This includes evaluating their performance in different tissue types, blood flow conditions, and in the presence of immune responses. The goal is to ensure that nanorobots can maintain their navigation accuracy and functionality across a range of biological environments that closely mimic those found in potential clinical applications.
Additionally, researchers aim to investigate the long-term stability and biocompatibility of nanorobots within animal models. This involves monitoring any potential adverse effects on the host organism and assessing the nanorobots' ability to maintain their navigational capabilities over extended periods. The ultimate goal is to develop nanorobots that can operate safely and effectively within living systems for durations relevant to their intended therapeutic or diagnostic applications.
Finally, the verification process aims to validate the control mechanisms used to guide nanorobots to their intended targets. This includes testing various navigation strategies, such as chemical gradients, magnetic fields, or acoustic waves, to determine their efficacy and limitations in vivo. The goal is to identify the most reliable and precise methods for directing nanorobots through complex biological systems, paving the way for their eventual use in clinical settings.
One key aspect of this verification process is to develop and implement robust tracking methods that can accurately monitor the position and trajectory of nanorobots in real-time within the complex and dynamic environment of animal bodies. This may involve the integration of advanced imaging techniques, such as fluorescence microscopy, magnetic resonance imaging (MRI), or positron emission tomography (PET), with sophisticated data analysis algorithms to provide high-resolution, three-dimensional tracking of nanorobots.
Another important goal is to establish standardized protocols and benchmarks for evaluating navigation performance across different nanorobot designs and animal models. This standardization is essential for comparing results between studies and accelerating the development of more effective navigation systems. Researchers aim to define metrics such as targeting accuracy, navigation speed, and the ability to overcome biological barriers, which can be consistently measured and reported.
Furthermore, the verification process seeks to assess the nanorobots' ability to adapt to and navigate through various physiological conditions encountered in animal models. This includes evaluating their performance in different tissue types, blood flow conditions, and in the presence of immune responses. The goal is to ensure that nanorobots can maintain their navigation accuracy and functionality across a range of biological environments that closely mimic those found in potential clinical applications.
Additionally, researchers aim to investigate the long-term stability and biocompatibility of nanorobots within animal models. This involves monitoring any potential adverse effects on the host organism and assessing the nanorobots' ability to maintain their navigational capabilities over extended periods. The ultimate goal is to develop nanorobots that can operate safely and effectively within living systems for durations relevant to their intended therapeutic or diagnostic applications.
Finally, the verification process aims to validate the control mechanisms used to guide nanorobots to their intended targets. This includes testing various navigation strategies, such as chemical gradients, magnetic fields, or acoustic waves, to determine their efficacy and limitations in vivo. The goal is to identify the most reliable and precise methods for directing nanorobots through complex biological systems, paving the way for their eventual use in clinical settings.
Market Demand for Nanorobot Navigation
The market demand for nanorobot navigation in animal models is driven by the increasing need for precise and minimally invasive medical interventions. As nanotechnology advances, the potential applications of nanorobots in healthcare continue to expand, particularly in targeted drug delivery, microsurgery, and diagnostics. The ability to accurately navigate nanorobots within biological systems is crucial for realizing these applications, making the verification of navigation accuracy a critical area of research and development.
In the pharmaceutical industry, there is a growing interest in using nanorobots for targeted drug delivery. This approach promises to enhance the efficacy of treatments while minimizing side effects by delivering therapeutic agents directly to specific cells or tissues. The market for targeted drug delivery is expected to grow significantly in the coming years, with nanorobot navigation playing a key role in its development.
The medical device industry is another sector showing substantial demand for nanorobot navigation technology. Microsurgery and minimally invasive procedures are becoming increasingly popular, and nanorobots could revolutionize these fields by allowing for extremely precise interventions at the cellular level. This could lead to improved patient outcomes and reduced recovery times, driving market growth in this area.
Research institutions and academic laboratories represent a significant portion of the current market demand for nanorobot navigation verification in animal models. These organizations are at the forefront of developing and testing new nanorobot designs and navigation systems, contributing to the advancement of the field and paving the way for future commercial applications.
The biotechnology sector is also showing interest in nanorobot navigation, particularly for applications in cellular and molecular biology research. Accurate navigation of nanorobots in animal models could provide unprecedented insights into biological processes at the nanoscale, opening up new avenues for scientific discovery and potential therapeutic interventions.
As the field of nanorobotics progresses, regulatory bodies are increasingly focusing on the safety and efficacy of these technologies. This has created a demand for robust verification methods for nanorobot navigation accuracy in animal models, as these studies will be crucial for obtaining regulatory approvals and ensuring the safe translation of nanorobot technologies to clinical applications.
The market demand is further fueled by the potential of nanorobot navigation to address unmet medical needs, particularly in the treatment of complex diseases such as cancer. The ability to precisely navigate nanorobots to tumor sites could revolutionize cancer treatment, driving significant investment and research in this area.
In the pharmaceutical industry, there is a growing interest in using nanorobots for targeted drug delivery. This approach promises to enhance the efficacy of treatments while minimizing side effects by delivering therapeutic agents directly to specific cells or tissues. The market for targeted drug delivery is expected to grow significantly in the coming years, with nanorobot navigation playing a key role in its development.
The medical device industry is another sector showing substantial demand for nanorobot navigation technology. Microsurgery and minimally invasive procedures are becoming increasingly popular, and nanorobots could revolutionize these fields by allowing for extremely precise interventions at the cellular level. This could lead to improved patient outcomes and reduced recovery times, driving market growth in this area.
Research institutions and academic laboratories represent a significant portion of the current market demand for nanorobot navigation verification in animal models. These organizations are at the forefront of developing and testing new nanorobot designs and navigation systems, contributing to the advancement of the field and paving the way for future commercial applications.
The biotechnology sector is also showing interest in nanorobot navigation, particularly for applications in cellular and molecular biology research. Accurate navigation of nanorobots in animal models could provide unprecedented insights into biological processes at the nanoscale, opening up new avenues for scientific discovery and potential therapeutic interventions.
As the field of nanorobotics progresses, regulatory bodies are increasingly focusing on the safety and efficacy of these technologies. This has created a demand for robust verification methods for nanorobot navigation accuracy in animal models, as these studies will be crucial for obtaining regulatory approvals and ensuring the safe translation of nanorobot technologies to clinical applications.
The market demand is further fueled by the potential of nanorobot navigation to address unmet medical needs, particularly in the treatment of complex diseases such as cancer. The ability to precisely navigate nanorobots to tumor sites could revolutionize cancer treatment, driving significant investment and research in this area.
Current Challenges in Nanorobot Tracking
Verifying the navigation accuracy of nanorobots in animal models presents several significant challenges that researchers must overcome. One of the primary obstacles is the microscopic scale of nanorobots, which makes them extremely difficult to track and monitor in real-time within living organisms. Traditional imaging techniques often lack the resolution and speed necessary to capture the rapid movements of these tiny devices in complex biological environments.
The dynamic and heterogeneous nature of animal tissues further complicates tracking efforts. Nanorobots must navigate through various biological barriers, including blood vessels, extracellular matrices, and cellular structures. These diverse environments can interfere with tracking signals and create unpredictable navigation paths, making it challenging to accurately assess the nanorobots' position and movement.
Another major hurdle is the need for biocompatible tracking methods that do not interfere with the nanorobots' functionality or cause harm to the animal model. Many conventional tracking technologies rely on labels or markers that may alter the nanorobots' behavior or induce unwanted biological responses. Developing non-invasive, real-time tracking solutions that maintain the integrity of both the nanorobots and the host organism remains a significant challenge.
The limited power and computational capabilities of nanorobots also pose difficulties in implementing onboard navigation and tracking systems. Most nanorobots lack the capacity to carry sophisticated sensors or transmitters, making it necessary to rely on external tracking methods. This limitation creates a gap between the nanorobot's actual position and the data available to researchers, potentially leading to inaccuracies in navigation assessment.
Furthermore, the interaction between nanorobots and biological systems introduces additional complexities. Factors such as protein adsorption, immune responses, and local variations in pH or temperature can affect the nanorobots' movement and functionality. These interactions make it challenging to distinguish between intentional navigation and passive drift or accumulation in specific tissues.
The need for long-term tracking presents another obstacle. Many potential applications of nanorobots, such as targeted drug delivery or continuous health monitoring, require extended periods of operation within the body. Developing tracking methods that can maintain accuracy and reliability over prolonged durations without causing adverse effects on the animal model is a significant challenge that researchers must address.
Lastly, the integration of multiple tracking modalities to provide comprehensive navigation data poses technical and data analysis challenges. Combining information from various imaging techniques, such as fluorescence microscopy, magnetic resonance imaging, and ultrasound, requires sophisticated data fusion algorithms and interpretation methods. Developing robust, multi-modal tracking systems that can provide accurate, real-time navigation information in animal models remains a key area of ongoing research and development in the field of nanorobotics.
The dynamic and heterogeneous nature of animal tissues further complicates tracking efforts. Nanorobots must navigate through various biological barriers, including blood vessels, extracellular matrices, and cellular structures. These diverse environments can interfere with tracking signals and create unpredictable navigation paths, making it challenging to accurately assess the nanorobots' position and movement.
Another major hurdle is the need for biocompatible tracking methods that do not interfere with the nanorobots' functionality or cause harm to the animal model. Many conventional tracking technologies rely on labels or markers that may alter the nanorobots' behavior or induce unwanted biological responses. Developing non-invasive, real-time tracking solutions that maintain the integrity of both the nanorobots and the host organism remains a significant challenge.
The limited power and computational capabilities of nanorobots also pose difficulties in implementing onboard navigation and tracking systems. Most nanorobots lack the capacity to carry sophisticated sensors or transmitters, making it necessary to rely on external tracking methods. This limitation creates a gap between the nanorobot's actual position and the data available to researchers, potentially leading to inaccuracies in navigation assessment.
Furthermore, the interaction between nanorobots and biological systems introduces additional complexities. Factors such as protein adsorption, immune responses, and local variations in pH or temperature can affect the nanorobots' movement and functionality. These interactions make it challenging to distinguish between intentional navigation and passive drift or accumulation in specific tissues.
The need for long-term tracking presents another obstacle. Many potential applications of nanorobots, such as targeted drug delivery or continuous health monitoring, require extended periods of operation within the body. Developing tracking methods that can maintain accuracy and reliability over prolonged durations without causing adverse effects on the animal model is a significant challenge that researchers must address.
Lastly, the integration of multiple tracking modalities to provide comprehensive navigation data poses technical and data analysis challenges. Combining information from various imaging techniques, such as fluorescence microscopy, magnetic resonance imaging, and ultrasound, requires sophisticated data fusion algorithms and interpretation methods. Developing robust, multi-modal tracking systems that can provide accurate, real-time navigation information in animal models remains a key area of ongoing research and development in the field of nanorobotics.
Existing Nanorobot Tracking Methods
01 Sensor-based navigation systems
Nanorobots can utilize various sensors for accurate navigation. These may include inertial measurement units, GPS receivers, and other specialized sensors to detect environmental cues. The integration of multiple sensor types allows for more precise positioning and movement control in complex environments.- GPS-based navigation systems for nanorobots: Advanced GPS-based navigation systems are being developed for nanorobots to improve their accuracy in locating and reaching target areas within the body. These systems utilize satellite signals and sophisticated algorithms to provide precise positioning and guidance for nanorobots, enhancing their ability to navigate complex biological environments.
- Magnetic field-guided nanorobot navigation: Magnetic field-guided navigation systems are being implemented to control and direct nanorobots with high precision. External magnetic fields are used to steer and position nanorobots within the body, allowing for accurate navigation through blood vessels and other biological structures. This approach offers real-time control and improved navigation accuracy for nanorobotic applications.
- Sensor-based navigation for nanorobots: Advanced sensor technologies are being integrated into nanorobots to enhance their navigation accuracy. These sensors can detect and respond to various environmental cues, such as chemical gradients, temperature changes, or specific biological markers. By incorporating multiple types of sensors, nanorobots can more accurately navigate complex biological environments and reach their intended targets.
- AI and machine learning algorithms for nanorobot navigation: Artificial intelligence and machine learning algorithms are being developed to improve nanorobot navigation accuracy. These advanced computational methods enable nanorobots to learn from their environment, adapt to changing conditions, and make real-time decisions to optimize their navigation paths. This approach significantly enhances the precision and efficiency of nanorobot movement within biological systems.
- Swarm intelligence for collaborative nanorobot navigation: Swarm intelligence techniques are being applied to nanorobot navigation to improve overall accuracy and efficiency. By utilizing collective behavior and distributed decision-making, swarms of nanorobots can collaborate to navigate complex environments more effectively. This approach allows for improved obstacle avoidance, target localization, and adaptive navigation strategies in challenging biological settings.
02 Machine learning and AI for navigation
Advanced algorithms and artificial intelligence techniques are employed to enhance nanorobot navigation accuracy. These systems can learn from past experiences, adapt to new environments, and make real-time decisions to optimize navigation paths and avoid obstacles.Expand Specific Solutions03 Swarm intelligence for collective navigation
Nanorobots can work in swarms, sharing information and coordinating their movements to achieve higher navigation accuracy. This collective approach allows for distributed sensing and decision-making, improving overall performance in complex or dynamic environments.Expand Specific Solutions04 Magnetic field-based navigation
Magnetic fields can be used to guide and control nanorobots with high precision. External magnetic fields or embedded magnetic materials within the nanorobots allow for remote steering and positioning, particularly useful in medical applications or confined spaces.Expand Specific Solutions05 Hybrid navigation systems
Combining multiple navigation techniques creates robust and adaptable systems for nanorobots. These hybrid approaches may integrate sensor data, external tracking, and autonomous decision-making to achieve high accuracy across various operating conditions and environments.Expand Specific Solutions
Key Players in Nanorobotics Research
The field of nanorobot navigation accuracy verification in animal models is in its early developmental stages, with a growing market driven by advancements in nanotechnology and biomedical engineering. The competitive landscape is characterized by collaborations between academic institutions and industry players, as evidenced by the involvement of universities like Harbin Engineering University and Southeast University alongside companies such as UBTECH Robotics and Syrius Robotics. The market size is expanding, fueled by increasing investments in nanomedicine and precision healthcare. While the technology is still evolving, progress in miniaturization, sensing capabilities, and AI-driven control systems is accelerating the development of more accurate and reliable nanorobot navigation methods for in vivo applications.
Harbin Engineering University
Technical Solution: Harbin Engineering University has developed a novel electromagnetic tracking system for verifying nanorobot navigation in animal models. Their approach utilizes miniaturized electromagnetic sensors integrated into nanorobots, coupled with an external array of electromagnetic field generators[8]. The system employs advanced signal processing algorithms to triangulate the position and orientation of nanorobots with sub-millimeter accuracy. To overcome limitations in deep tissue penetration, they have implemented a multi-frequency excitation scheme that allows for adaptive tracking in different tissue environments[10]. The electromagnetic tracking data is fused with anatomical imaging modalities such as CT or MRI to provide context for nanorobot navigation within the animal body. Additionally, they have developed machine learning algorithms to predict nanorobot trajectories and optimize navigation strategies in real-time[12].
Strengths: High temporal resolution, no line-of-sight requirements, potential for closed-loop control. Weaknesses: Susceptibility to electromagnetic interference, limited spatial resolution compared to optical methods.
Shenyang Institute of Automation
Technical Solution: The Shenyang Institute of Automation has developed an advanced microfluidic-based platform for verifying nanorobot navigation accuracy in animal-mimicking environments. Their system utilizes transparent microfluidic chips fabricated with intricate channel networks that simulate various physiological conditions found in animal models[13]. Nanorobots are introduced into these microfluidic environments and their navigation is tracked using high-speed confocal microscopy. The platform incorporates programmable flow control systems to replicate dynamic physiological conditions such as blood flow and interstitial fluid movement. Advanced image analysis algorithms are employed to extract quantitative data on nanorobot velocity, trajectory, and interaction with simulated biological barriers[15]. The system also allows for the integration of cell cultures within the microfluidic channels to study nanorobot-tissue interactions in a controlled setting.
Strengths: Highly controlled experimental environment, high-throughput testing capabilities, reduced need for animal studies. Weaknesses: Limited physiological complexity compared to in vivo models, potential for artifacts due to artificial environment.
Innovations in Nanorobot Localization
Navigation method for robot and robot thereof
PatentActiveTW202409769A
Innovation
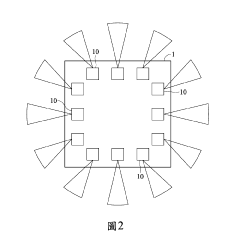
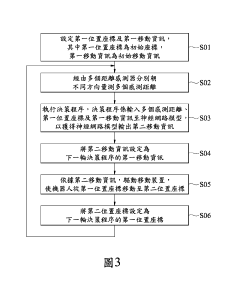
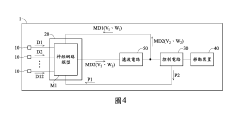
- A robot navigation method utilizing multiple distance sensors, a decision-making circuit, and a neural network model to determine movement information without map-based navigation, incorporating a filter circuit to smooth outputs and an evaluation network to optimize decision-making for efficient path planning.

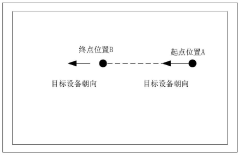
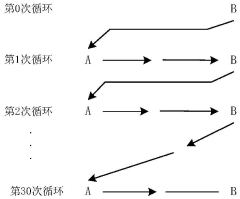
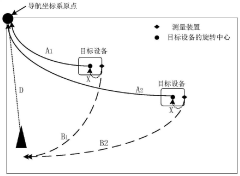
Navigation precision determination method and apparatus, and electronic device
PatentActiveCN114683279A
Innovation
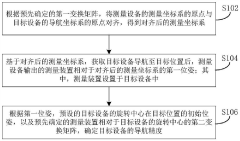
- Align the measurement coordinate system of the measurement equipment with the navigation coordinate system of the target equipment through the predetermined first transformation matrix, obtain the pose of the measurement device relative to the aligned measurement coordinate system after the target equipment navigates to the target position, and use the first The second transformation matrix aligns the center of the measurement device with the rotation center of the target device to determine the navigation accuracy.
Animal Model Selection Criteria
Selecting appropriate animal models is crucial for verifying the navigation accuracy of nanorobots. The criteria for animal model selection should consider several key factors to ensure the relevance and reliability of the experimental results.
Firstly, the anatomical and physiological similarities between the chosen animal model and humans are paramount. The animal's vascular system, organ structures, and tissue compositions should closely resemble those of humans to provide meaningful insights into nanorobot navigation. Rodents, such as mice and rats, are often used due to their well-characterized biology and genetic similarity to humans. However, larger animals like pigs or non-human primates may be more suitable for certain applications due to their closer physiological resemblance to humans.
The size of the animal model is another critical consideration. The scale of the animal's body and organs should be appropriate for the intended nanorobot application. Smaller animals may be suitable for initial proof-of-concept studies, while larger animals might be necessary for more advanced testing of navigation accuracy in complex anatomical structures.
The disease model compatibility is essential when selecting animal models for nanorobot navigation studies. If the nanorobots are designed for specific therapeutic applications, the animal model should be able to replicate the target disease or condition. This ensures that the navigation accuracy can be assessed in a clinically relevant context.
The availability of imaging technologies compatible with the chosen animal model is crucial for verifying navigation accuracy. The animal model should allow for high-resolution, real-time imaging of nanorobot movement within the body. This may involve considerations such as the animal's size, tissue density, and compatibility with imaging modalities like MRI, CT, or fluorescence imaging.
Ethical considerations and regulatory compliance are also vital in animal model selection. The chosen model should align with ethical guidelines for animal research and comply with relevant regulations. This includes minimizing animal suffering and using the minimum number of animals necessary to obtain statistically significant results.
Lastly, the reproducibility and standardization of the animal model are important for ensuring consistent and reliable results. Well-established animal models with standardized protocols and known biological variability are preferable for assessing nanorobot navigation accuracy. This allows for better comparison of results across different studies and facilitates the translation of findings to clinical applications.
Firstly, the anatomical and physiological similarities between the chosen animal model and humans are paramount. The animal's vascular system, organ structures, and tissue compositions should closely resemble those of humans to provide meaningful insights into nanorobot navigation. Rodents, such as mice and rats, are often used due to their well-characterized biology and genetic similarity to humans. However, larger animals like pigs or non-human primates may be more suitable for certain applications due to their closer physiological resemblance to humans.
The size of the animal model is another critical consideration. The scale of the animal's body and organs should be appropriate for the intended nanorobot application. Smaller animals may be suitable for initial proof-of-concept studies, while larger animals might be necessary for more advanced testing of navigation accuracy in complex anatomical structures.
The disease model compatibility is essential when selecting animal models for nanorobot navigation studies. If the nanorobots are designed for specific therapeutic applications, the animal model should be able to replicate the target disease or condition. This ensures that the navigation accuracy can be assessed in a clinically relevant context.
The availability of imaging technologies compatible with the chosen animal model is crucial for verifying navigation accuracy. The animal model should allow for high-resolution, real-time imaging of nanorobot movement within the body. This may involve considerations such as the animal's size, tissue density, and compatibility with imaging modalities like MRI, CT, or fluorescence imaging.
Ethical considerations and regulatory compliance are also vital in animal model selection. The chosen model should align with ethical guidelines for animal research and comply with relevant regulations. This includes minimizing animal suffering and using the minimum number of animals necessary to obtain statistically significant results.
Lastly, the reproducibility and standardization of the animal model are important for ensuring consistent and reliable results. Well-established animal models with standardized protocols and known biological variability are preferable for assessing nanorobot navigation accuracy. This allows for better comparison of results across different studies and facilitates the translation of findings to clinical applications.
Ethical Considerations in Nanorobot Testing
The ethical considerations in nanorobot testing for animal models are paramount, given the potential risks and implications of this emerging technology. One primary concern is the welfare of the animals involved in these experiments. Researchers must ensure that the introduction of nanorobots into animal bodies does not cause undue harm, pain, or distress. This requires rigorous safety protocols and continuous monitoring of the animals' health and behavior throughout the testing process.
Another critical ethical aspect is the potential long-term effects of nanorobots on the animals' physiology and ecosystem. Even after the completion of experiments, there may be unforeseen consequences on the animals' health or reproductive capabilities. Therefore, it is essential to conduct thorough follow-up studies and establish protocols for the safe removal or deactivation of nanorobots post-experimentation.
The principle of reducing animal testing should also be applied to nanorobot research. Scientists should explore alternative methods, such as in vitro testing or computer simulations, whenever possible to minimize the use of animal subjects. When animal testing is necessary, the experiments should be designed to maximize the information gained while using the minimum number of animals required for statistical significance.
Transparency and ethical oversight are crucial in nanorobot testing. Research institutions should establish dedicated ethics committees to review and approve all nanorobot experiments involving animal models. These committees should include experts in nanotechnology, animal welfare, and bioethics to ensure a comprehensive evaluation of the ethical implications.
Data privacy and security also present ethical challenges in nanorobot testing. The information collected by nanorobots during navigation in animal models may be sensitive and potentially identifiable. Researchers must implement robust data protection measures to prevent unauthorized access or misuse of this information.
Lastly, there is an ethical obligation to share the knowledge gained from nanorobot testing in animal models with the broader scientific community. This includes publishing both positive and negative results to advance the field and prevent unnecessary duplication of animal experiments. By adhering to these ethical considerations, researchers can ensure that the development of nanorobot navigation technology progresses responsibly and with due respect for animal welfare.
Another critical ethical aspect is the potential long-term effects of nanorobots on the animals' physiology and ecosystem. Even after the completion of experiments, there may be unforeseen consequences on the animals' health or reproductive capabilities. Therefore, it is essential to conduct thorough follow-up studies and establish protocols for the safe removal or deactivation of nanorobots post-experimentation.
The principle of reducing animal testing should also be applied to nanorobot research. Scientists should explore alternative methods, such as in vitro testing or computer simulations, whenever possible to minimize the use of animal subjects. When animal testing is necessary, the experiments should be designed to maximize the information gained while using the minimum number of animals required for statistical significance.
Transparency and ethical oversight are crucial in nanorobot testing. Research institutions should establish dedicated ethics committees to review and approve all nanorobot experiments involving animal models. These committees should include experts in nanotechnology, animal welfare, and bioethics to ensure a comprehensive evaluation of the ethical implications.
Data privacy and security also present ethical challenges in nanorobot testing. The information collected by nanorobots during navigation in animal models may be sensitive and potentially identifiable. Researchers must implement robust data protection measures to prevent unauthorized access or misuse of this information.
Lastly, there is an ethical obligation to share the knowledge gained from nanorobot testing in animal models with the broader scientific community. This includes publishing both positive and negative results to advance the field and prevent unnecessary duplication of animal experiments. By adhering to these ethical considerations, researchers can ensure that the development of nanorobot navigation technology progresses responsibly and with due respect for animal welfare.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!