

Drive-by-wire chassis system of four-wheel independent steering unmanned vehicle
A technology of unmanned vehicles and four-wheel independent steering, which is applied to steering mechanisms, vehicle components, elastic suspensions, etc., can solve the problems of inability to effectively absorb the vibration energy of vehicles, and does not have the function of anti-rotation of electric wheels, so as to reduce the Small resistance, ensure driving accuracy, and ensure the effect of vibration frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will be combined with Figure 1 to Figure 8 The present invention is described in detail, and the technical solutions in the embodiments of the present invention are clearly and completely described. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
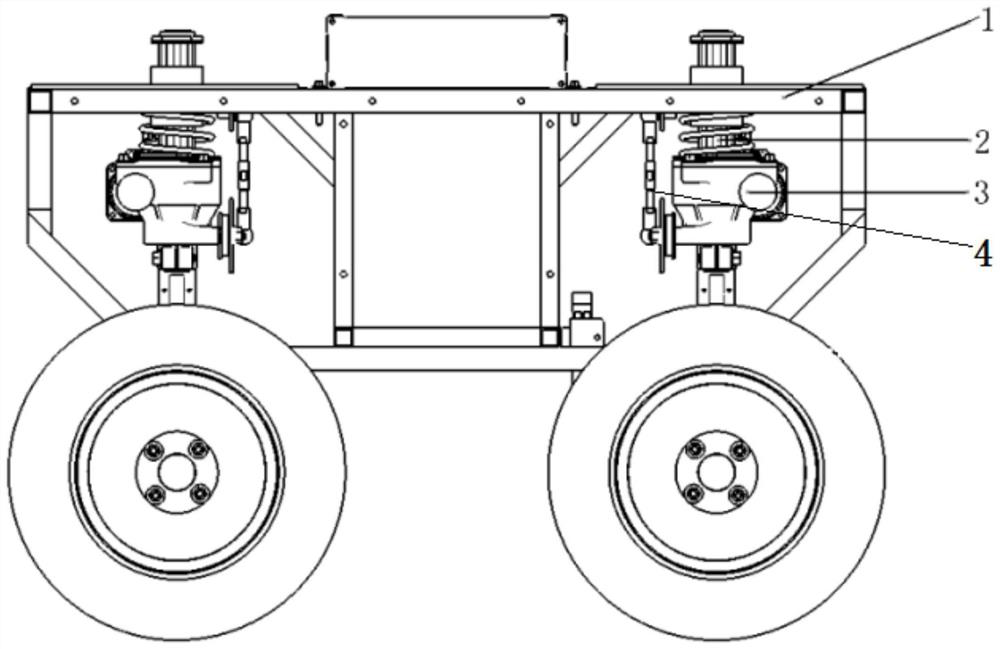
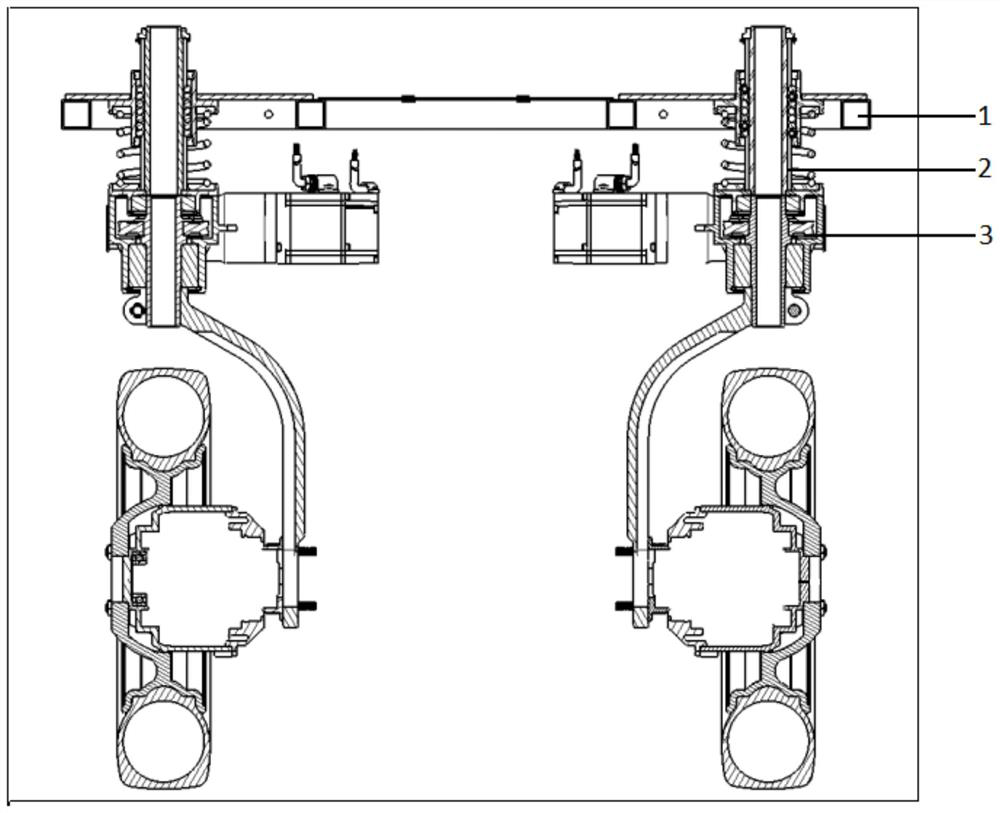
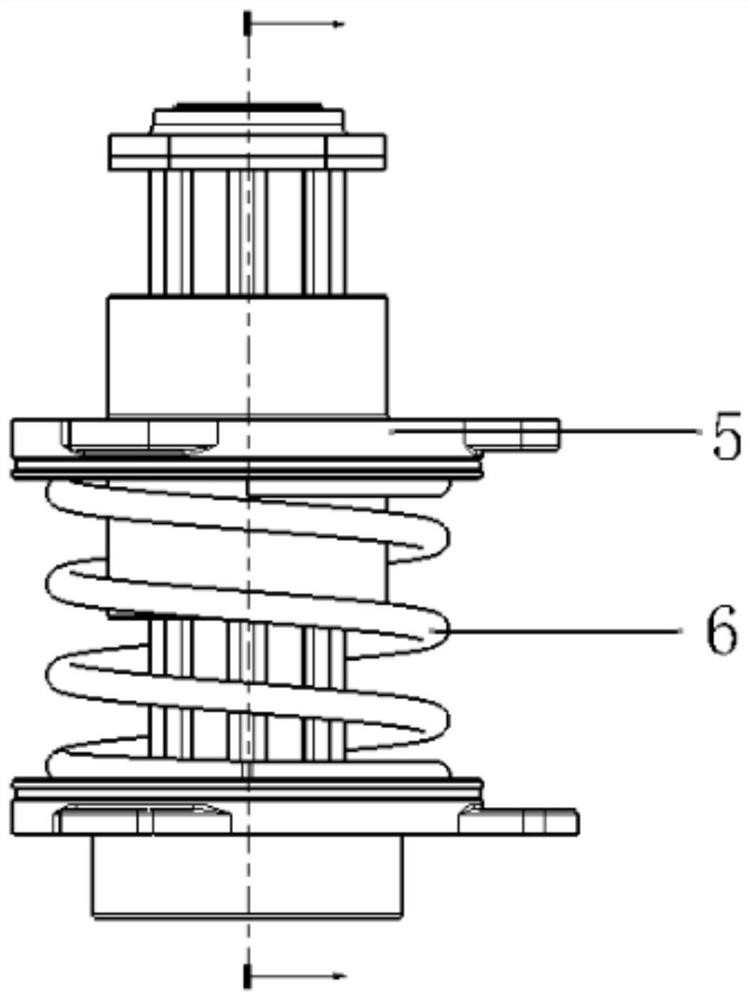
[0032] The present invention provides a kind of wire control chassis system of four-wheel independent steering unmanned vehicle through improving here, as Figure 1-Figure 8 As shown, a control-by-wire chassis system of a four-wheel independent steering unmanned vehicle includes a body frame 1, and also includes a plurality of suspension systems 2 and a plurality of steering systems 3 arranged under the body frame 1, each of which The sus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More