Time-Of-Flight Depth Precision: Jitter, Integration Time And Denoising
SEP 22, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
ToF Depth Sensing Background and Objectives
Time-of-Flight (ToF) technology has evolved significantly over the past two decades, emerging as a pivotal solution for depth sensing applications across multiple industries. Initially developed for military and aerospace applications in the early 2000s, ToF sensors have undergone substantial miniaturization and cost reduction, enabling their integration into consumer electronics, automotive systems, and industrial automation equipment.
The fundamental principle of ToF depth sensing relies on measuring the time taken for light pulses to travel from an emitter to an object and back to a receiver. This travel time directly correlates to the distance between the sensor and the object, allowing for precise depth mapping of environments. Modern ToF systems typically utilize infrared light sources operating at wavelengths between 850-940nm, which remain invisible to the human eye while providing sufficient penetration capabilities.
Recent technological advancements have focused on improving the precision and reliability of ToF measurements, particularly addressing challenges related to jitter, integration time optimization, and signal denoising. Jitter, the unwanted variation in signal timing, represents one of the most significant obstacles to achieving high-precision depth measurements, especially in dynamic environments or under varying lighting conditions.
Integration time—the duration over which the sensor collects returning light signals—presents a critical trade-off between depth precision and motion artifacts. Longer integration times generally yield more accurate depth data but increase susceptibility to motion blur, while shorter integration times preserve temporal resolution at the cost of depth precision.
Denoising algorithms have become increasingly sophisticated, employing machine learning techniques, spatial-temporal filtering, and multi-frame analysis to extract meaningful depth information from noisy raw sensor data. These computational approaches aim to compensate for physical limitations of the hardware while maintaining real-time performance requirements.
The primary objectives in advancing ToF depth sensing technology center on achieving sub-millimeter precision across varying environmental conditions, reducing power consumption for mobile applications, and enhancing robustness against interference sources such as ambient light and multi-path reflections. Additionally, there is growing emphasis on developing unified frameworks that optimally balance the interdependent parameters of jitter reduction, integration time, and denoising algorithms.
As applications in autonomous vehicles, robotics, augmented reality, and gesture recognition continue to demand higher performance from depth sensing systems, research efforts are increasingly focused on holistic approaches that consider the entire sensing pipeline rather than isolated optimization of individual components.
The fundamental principle of ToF depth sensing relies on measuring the time taken for light pulses to travel from an emitter to an object and back to a receiver. This travel time directly correlates to the distance between the sensor and the object, allowing for precise depth mapping of environments. Modern ToF systems typically utilize infrared light sources operating at wavelengths between 850-940nm, which remain invisible to the human eye while providing sufficient penetration capabilities.
Recent technological advancements have focused on improving the precision and reliability of ToF measurements, particularly addressing challenges related to jitter, integration time optimization, and signal denoising. Jitter, the unwanted variation in signal timing, represents one of the most significant obstacles to achieving high-precision depth measurements, especially in dynamic environments or under varying lighting conditions.
Integration time—the duration over which the sensor collects returning light signals—presents a critical trade-off between depth precision and motion artifacts. Longer integration times generally yield more accurate depth data but increase susceptibility to motion blur, while shorter integration times preserve temporal resolution at the cost of depth precision.
Denoising algorithms have become increasingly sophisticated, employing machine learning techniques, spatial-temporal filtering, and multi-frame analysis to extract meaningful depth information from noisy raw sensor data. These computational approaches aim to compensate for physical limitations of the hardware while maintaining real-time performance requirements.
The primary objectives in advancing ToF depth sensing technology center on achieving sub-millimeter precision across varying environmental conditions, reducing power consumption for mobile applications, and enhancing robustness against interference sources such as ambient light and multi-path reflections. Additionally, there is growing emphasis on developing unified frameworks that optimally balance the interdependent parameters of jitter reduction, integration time, and denoising algorithms.
As applications in autonomous vehicles, robotics, augmented reality, and gesture recognition continue to demand higher performance from depth sensing systems, research efforts are increasingly focused on holistic approaches that consider the entire sensing pipeline rather than isolated optimization of individual components.
Market Applications and Demand Analysis for ToF Technology
The Time-of-Flight (ToF) technology market has experienced significant growth in recent years, driven by increasing demand for 3D sensing capabilities across multiple industries. The global ToF sensor market was valued at $2.8 billion in 2021 and is projected to reach $6.9 billion by 2026, representing a compound annual growth rate of approximately 15%.
Consumer electronics represents the largest market segment for ToF technology, with smartphone manufacturers integrating depth sensors for facial recognition, augmented reality applications, and enhanced photography features. Apple's implementation of LiDAR scanners in iPad Pro and iPhone Pro models has significantly raised consumer awareness and expectations for depth sensing capabilities.
Automotive applications form another rapidly expanding market for ToF technology, particularly for advanced driver assistance systems (ADAS) and autonomous vehicles. ToF sensors enable precise object detection, classification, and distance measurement, critical for collision avoidance and navigation systems. The automotive ToF sensor market is expected to grow at a CAGR of 17% through 2027.
Industrial automation represents a substantial growth opportunity for ToF technology, with applications in robotics, machine vision, and quality control. Manufacturing facilities increasingly deploy ToF sensors for bin picking, object dimensioning, and production line monitoring. The precision offered by advanced ToF systems directly translates to manufacturing efficiency and reduced error rates.
Healthcare applications are emerging as a promising frontier for ToF technology, with uses in patient monitoring, touchless interfaces for medical equipment, and rehabilitation therapy. The COVID-19 pandemic has accelerated adoption of contactless technologies in healthcare settings, creating new opportunities for ToF implementations.
Smart infrastructure and retail analytics represent growing market segments, with ToF sensors enabling people counting, traffic flow analysis, and customer behavior tracking. These applications benefit significantly from improvements in depth precision and noise reduction capabilities.
Market research indicates that customers across all segments prioritize three key performance metrics in ToF technology: measurement accuracy, operational range, and environmental adaptability. Improvements in jitter reduction, optimal integration time management, and advanced denoising algorithms directly address these customer requirements, explaining the strong market interest in these technical aspects.
The market shows increasing demand for ToF solutions that can operate reliably in challenging environments with variable lighting conditions. This has created competitive differentiation opportunities for manufacturers who can effectively address precision limitations through hardware and software innovations.
Consumer electronics represents the largest market segment for ToF technology, with smartphone manufacturers integrating depth sensors for facial recognition, augmented reality applications, and enhanced photography features. Apple's implementation of LiDAR scanners in iPad Pro and iPhone Pro models has significantly raised consumer awareness and expectations for depth sensing capabilities.
Automotive applications form another rapidly expanding market for ToF technology, particularly for advanced driver assistance systems (ADAS) and autonomous vehicles. ToF sensors enable precise object detection, classification, and distance measurement, critical for collision avoidance and navigation systems. The automotive ToF sensor market is expected to grow at a CAGR of 17% through 2027.
Industrial automation represents a substantial growth opportunity for ToF technology, with applications in robotics, machine vision, and quality control. Manufacturing facilities increasingly deploy ToF sensors for bin picking, object dimensioning, and production line monitoring. The precision offered by advanced ToF systems directly translates to manufacturing efficiency and reduced error rates.
Healthcare applications are emerging as a promising frontier for ToF technology, with uses in patient monitoring, touchless interfaces for medical equipment, and rehabilitation therapy. The COVID-19 pandemic has accelerated adoption of contactless technologies in healthcare settings, creating new opportunities for ToF implementations.
Smart infrastructure and retail analytics represent growing market segments, with ToF sensors enabling people counting, traffic flow analysis, and customer behavior tracking. These applications benefit significantly from improvements in depth precision and noise reduction capabilities.
Market research indicates that customers across all segments prioritize three key performance metrics in ToF technology: measurement accuracy, operational range, and environmental adaptability. Improvements in jitter reduction, optimal integration time management, and advanced denoising algorithms directly address these customer requirements, explaining the strong market interest in these technical aspects.
The market shows increasing demand for ToF solutions that can operate reliably in challenging environments with variable lighting conditions. This has created competitive differentiation opportunities for manufacturers who can effectively address precision limitations through hardware and software innovations.
Current Challenges in ToF Depth Precision
Time-of-Flight (ToF) depth sensing technology faces several critical challenges that limit its precision and reliability in real-world applications. The most significant issue is temporal noise, commonly referred to as jitter, which manifests as random fluctuations in depth measurements even when observing static scenes. This jitter can range from millimeters to centimeters depending on the system quality and environmental conditions, severely impacting applications requiring high precision such as gesture recognition or object dimensioning.
Integration time presents another fundamental challenge in ToF systems. Longer integration times generally improve signal-to-noise ratio by collecting more photons, thereby reducing random noise. However, this approach creates a direct trade-off with frame rate and motion artifacts. In dynamic scenes, longer integration times lead to motion blur in depth maps, while shorter integration times preserve temporal resolution but increase noise levels. Finding the optimal balance remains application-specific and challenging.
Multi-path interference represents a persistent problem where the emitted light takes multiple paths before returning to the sensor, causing significant measurement errors. This effect is particularly pronounced in scenes with reflective surfaces, corners, or complex geometries. Current ToF systems struggle to differentiate between direct and indirect light paths, resulting in systematic depth errors that can exceed several centimeters.
Environmental factors further complicate ToF precision. Ambient light, particularly sunlight with its strong near-infrared component, can overwhelm the ToF sensor signal. Temperature variations affect both the light source and sensor characteristics, introducing drift in measurements over time. These environmental dependencies make consistent performance across different conditions difficult to achieve.
Power consumption constraints limit the illumination strength in many ToF applications, especially in mobile and battery-powered devices. This restriction directly impacts the signal-to-noise ratio and consequently the depth precision, creating a challenging balance between power efficiency and measurement quality.
Denoising algorithms offer potential solutions but introduce their own challenges. Traditional filtering approaches often blur depth edges and fine details. Advanced techniques like temporal filtering can reduce noise but introduce latency. Machine learning-based denoising shows promise but requires significant computational resources and carefully curated training data to avoid artifacts or hallucinated details.
Resolution limitations also affect precision, as current ToF sensors typically offer lower resolution compared to RGB cameras. This resolution gap creates difficulties in applications requiring fine detail recognition or precise object boundaries, particularly at longer distances where depth precision naturally degrades.
Integration time presents another fundamental challenge in ToF systems. Longer integration times generally improve signal-to-noise ratio by collecting more photons, thereby reducing random noise. However, this approach creates a direct trade-off with frame rate and motion artifacts. In dynamic scenes, longer integration times lead to motion blur in depth maps, while shorter integration times preserve temporal resolution but increase noise levels. Finding the optimal balance remains application-specific and challenging.
Multi-path interference represents a persistent problem where the emitted light takes multiple paths before returning to the sensor, causing significant measurement errors. This effect is particularly pronounced in scenes with reflective surfaces, corners, or complex geometries. Current ToF systems struggle to differentiate between direct and indirect light paths, resulting in systematic depth errors that can exceed several centimeters.
Environmental factors further complicate ToF precision. Ambient light, particularly sunlight with its strong near-infrared component, can overwhelm the ToF sensor signal. Temperature variations affect both the light source and sensor characteristics, introducing drift in measurements over time. These environmental dependencies make consistent performance across different conditions difficult to achieve.
Power consumption constraints limit the illumination strength in many ToF applications, especially in mobile and battery-powered devices. This restriction directly impacts the signal-to-noise ratio and consequently the depth precision, creating a challenging balance between power efficiency and measurement quality.
Denoising algorithms offer potential solutions but introduce their own challenges. Traditional filtering approaches often blur depth edges and fine details. Advanced techniques like temporal filtering can reduce noise but introduce latency. Machine learning-based denoising shows promise but requires significant computational resources and carefully curated training data to avoid artifacts or hallucinated details.
Resolution limitations also affect precision, as current ToF sensors typically offer lower resolution compared to RGB cameras. This resolution gap creates difficulties in applications requiring fine detail recognition or precise object boundaries, particularly at longer distances where depth precision naturally degrades.
Current Approaches to ToF Jitter Reduction
01 Depth precision enhancement techniques in ToF systems
Various methods are employed to enhance depth precision in Time-of-Flight systems, including advanced signal processing algorithms, multi-frequency approaches, and phase unwrapping techniques. These methods help to reduce measurement errors and improve the accuracy of depth measurements. Some systems utilize calibration procedures to compensate for systematic errors, while others implement adaptive filtering to optimize depth precision under varying environmental conditions.- Depth precision enhancement techniques in ToF systems: Various methods can be employed to enhance depth precision in Time-of-Flight systems. These include advanced signal processing algorithms, multi-frequency approaches, and phase unwrapping techniques. By implementing these methods, ToF systems can achieve higher accuracy in depth measurements, which is crucial for applications requiring precise distance information. These techniques help overcome limitations in conventional ToF systems and improve overall performance in depth sensing applications.
- Jitter reduction methods for ToF sensors: Jitter in ToF systems can be reduced through various approaches including temporal filtering, spatial averaging, and hardware optimizations. These methods help stabilize the depth measurements by minimizing random variations in timing signals. Implementing jitter reduction techniques is essential for applications requiring stable and consistent depth data, such as gesture recognition and object tracking. Advanced algorithms can be used to compensate for jitter effects in real-time, improving the overall reliability of ToF measurements.
- Multi-path interference mitigation in ToF systems: Multi-path interference occurs when light takes multiple paths before returning to the sensor, causing errors in depth measurements. Techniques to mitigate this interference include frequency modulation schemes, coded light patterns, and computational methods that can separate direct and indirect light paths. By addressing multi-path interference, ToF systems can achieve more accurate depth measurements even in complex environments with reflective surfaces. These mitigation strategies significantly improve the precision and reliability of depth data in challenging scenarios.
- Calibration methods for improving ToF accuracy: Proper calibration is essential for achieving high precision in ToF systems. Calibration methods include temperature compensation, lens distortion correction, and systematic error modeling. These techniques help address various sources of measurement errors and ensure consistent performance across different operating conditions. Advanced calibration approaches may use machine learning algorithms to adapt to changing environmental factors, further enhancing the accuracy of depth measurements in real-world applications.
- Integration of multiple sensors for enhanced ToF performance: Combining ToF sensors with other sensing modalities such as RGB cameras, infrared sensors, or structured light can significantly improve depth precision and reduce jitter. Sensor fusion techniques allow for cross-validation of measurements and can compensate for the limitations of individual sensing technologies. This integrated approach enables more robust depth sensing in varying lighting conditions and complex environments. The complementary nature of different sensors helps achieve higher accuracy and reliability in depth measurements for advanced applications.
02 Jitter reduction methods for ToF sensors
Jitter in ToF systems, which manifests as temporal noise in depth measurements, can be mitigated through various approaches. These include temporal filtering, pixel binning, and specialized hardware designs. Some implementations use oversampling techniques to average out random noise, while others employ phase-locked loops to stabilize timing signals. Advanced jitter compensation algorithms can dynamically adjust for environmental factors that contribute to measurement instability.Expand Specific Solutions03 Multi-path interference reduction for improved ToF accuracy
Multi-path interference occurs when light takes multiple paths before returning to the sensor, causing errors in depth measurements. Advanced ToF systems implement techniques such as frequency modulation, spatial filtering, and computational methods to identify and correct for these interferences. Some approaches use multiple light sources or detectors arranged in specific geometries to differentiate between direct and indirect light paths, significantly improving depth precision and reducing jitter.Expand Specific Solutions04 Environmental adaptation for ToF measurement stability
ToF systems must adapt to varying environmental conditions to maintain depth precision. This includes compensation for ambient light, temperature variations, and reflectivity differences of target surfaces. Some implementations use dynamic exposure control, while others employ machine learning algorithms to predict and adjust for environmental factors. Adaptive illumination power and sensor sensitivity settings help maintain consistent performance across different operating conditions, reducing environmentally-induced jitter.Expand Specific Solutions05 Hardware innovations for high-precision ToF measurements
Hardware innovations play a crucial role in improving ToF depth precision and reducing jitter. These include specialized sensor designs with high quantum efficiency, custom ASIC implementations for precise timing control, and novel illumination sources with optimized modulation capabilities. Some systems incorporate multiple synchronized sensors or use heterogeneous sensor fusion approaches. Advanced optical designs, including specialized lenses and filters, help to maximize signal quality while minimizing noise sources that contribute to measurement uncertainty.Expand Specific Solutions
Leading ToF Sensor Manufacturers and Integrators
The Time-of-Flight (ToF) depth sensing market is currently in a growth phase, with an expanding ecosystem of players across semiconductor, consumer electronics, and automotive sectors. The market is projected to reach approximately $6-8 billion by 2026, driven by applications in smartphone cameras, autonomous vehicles, and industrial automation. Leading semiconductor companies like Sony Semiconductor Solutions, Qualcomm, and Analog Devices are advancing core sensor technologies, while system integrators such as Microsoft, Huawei, and Samsung are implementing ToF in consumer products. Technical maturity varies significantly across applications, with Sony, Microsoft, and Qualcomm demonstrating advanced jitter reduction and denoising algorithms. Emerging players like Orbbec and LeddarTech are focusing on specialized ToF applications, while research institutions including Fraunhofer-Gesellschaft and EPFL are developing next-generation solutions to address precision limitations in challenging environments.
Sony Semiconductor Solutions Corp.
Technical Solution: Sony Semiconductor Solutions has developed advanced Time-of-Flight (ToF) sensors with DepthSense™ technology that addresses jitter and precision challenges through multi-path error suppression algorithms. Their IMX556PLR ToF sensor employs a unique back-illuminated CMOS image sensor architecture with dedicated signal processing circuits that perform real-time denoising. The system utilizes variable integration time control that automatically adjusts based on ambient light conditions and target distance, optimizing the signal-to-noise ratio. Sony's approach includes a proprietary phase-based filtering technique that reduces temporal noise (jitter) by analyzing multiple consecutive frames and applying weighted averaging based on confidence metrics. Their latest sensors incorporate a hybrid filtering approach combining spatial and temporal denoising while preserving edge information, achieving precision improvements of up to 30% in challenging lighting conditions compared to previous generations.
Strengths: Superior low-light performance due to back-illuminated sensor design; integrated signal processing reduces system complexity; adaptive integration time control improves dynamic range. Weaknesses: Higher power consumption compared to simpler ToF solutions; premium pricing may limit adoption in cost-sensitive applications; proprietary algorithms require specific development environments.
Orbbec Inc.
Technical Solution: Orbbec has developed a comprehensive approach to ToF depth precision enhancement focusing on their Astra+ and Femto series. Their technology employs a multi-frequency modulation scheme that captures depth data at different modulation frequencies (typically 20MHz, 50MHz, and 100MHz), allowing for improved precision across varying distances. To address jitter issues, Orbbec implements a temporal stability filter that analyzes pixel consistency across multiple frames, applying confidence-based weighted averaging to reduce random noise while preserving motion. For integration time optimization, their sensors feature an adaptive exposure control system that dynamically adjusts based on scene reflectivity and ambient light conditions, maintaining optimal signal strength without saturation. The denoising pipeline includes a multi-stage approach combining bilateral filtering with edge-preserving smoothing and a proprietary depth consistency check that identifies and corrects outlier measurements. This system achieves sub-millimeter precision at short ranges (0.2-1m) and maintains 1% distance accuracy up to 5 meters in controlled environments.
Strengths: Cost-effective implementation suitable for mass-market applications; well-documented SDK allows for customization of denoising parameters; multi-frequency approach improves accuracy across different distances. Weaknesses: Processing overhead for multi-frequency analysis can impact frame rate; performance degrades more significantly in outdoor environments compared to premium competitors; limited effectiveness for highly reflective or transparent objects.
Key Patents and Research in ToF Denoising Techniques
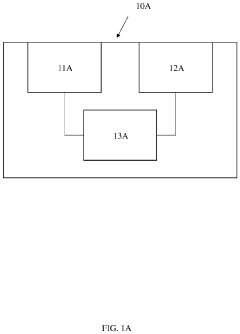
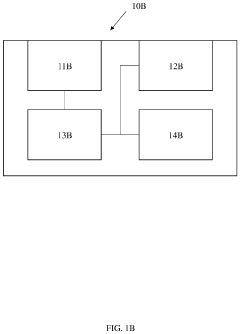
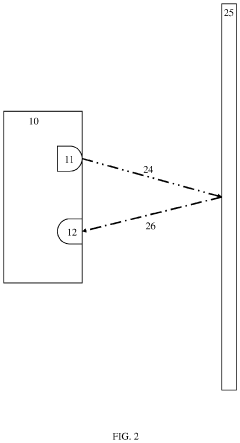
Time-of-flight system with time-of-flight receiving devices which are spatially separate from one another, and method for measuring the distance from an object
PatentWO2014180553A1
Innovation
- A time-of-flight system with spatially separated receiving devices that use a common modulated electromagnetic radiation source, synchronized across all devices, allowing for geometric correction of depth values to determine object distance using the law of cosines, enabling flexible positioning and accurate 3D data acquisition from multiple angles without the need for a common installation space.


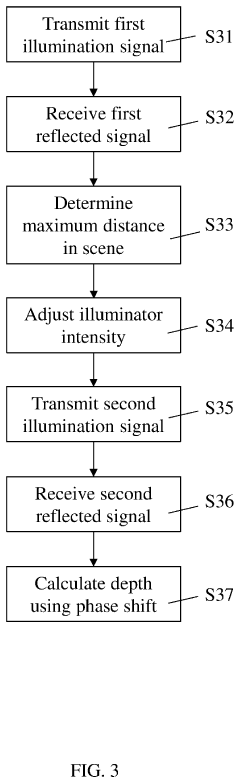
Method for measuring depth using a time-of-flight depth sensor
PatentInactiveUS20220099836A1
Innovation
- A ToF depth sensor apparatus with a controllable emitter that adjusts signal intensity and modulation frequency based on context information, such as movement or image changes, to optimize power usage while maintaining accurate depth measurements.
Integration Time Optimization Strategies
Integration time in Time-of-Flight (ToF) systems represents a critical parameter that directly impacts depth precision and overall system performance. Optimizing integration time involves balancing multiple competing factors to achieve optimal depth measurement quality while maintaining operational efficiency.
The fundamental relationship between integration time and signal-to-noise ratio (SNR) follows a square root dependency, where longer integration times increase SNR proportionally to the square root of the integration period. However, this theoretical improvement faces practical limitations in real-world ToF applications. Extended integration periods can lead to motion artifacts when capturing dynamic scenes, as movement during capture results in blurring and depth inconsistencies.
Several adaptive integration time strategies have emerged to address these challenges. Multi-exposure techniques utilize multiple captures with varying integration times, combining the advantages of short exposures (reduced motion artifacts, better handling of bright reflections) with longer exposures (improved SNR in low-reflectivity regions). These captures are then intelligently merged using weighted averaging or more sophisticated fusion algorithms.
Scene-aware integration time control represents another significant advancement, where the system analyzes scene characteristics in real-time to dynamically adjust integration parameters. This approach typically employs a feedback loop that evaluates metrics such as amplitude strength, pixel saturation levels, and estimated depth variance to continuously optimize integration settings for specific environmental conditions.
Hardware-level optimizations complement these algorithmic approaches. Modern ToF sensors increasingly incorporate per-pixel integration time control, allowing different regions of the same frame to use optimized exposure settings. This capability proves particularly valuable in scenes with high dynamic range, where bright and dark objects coexist.
Temperature compensation mechanisms have also become essential components of integration time optimization strategies, as thermal drift significantly impacts ToF sensor performance. By modeling the relationship between operating temperature and optimal integration parameters, systems can maintain consistent depth precision across varying thermal conditions.
The trade-off between frame rate and integration time presents another optimization dimension. Application-specific requirements often dictate this balance, with high-speed tracking applications favoring shorter integration times despite reduced precision, while static object scanning may prioritize longer integration periods for maximum depth accuracy.
The fundamental relationship between integration time and signal-to-noise ratio (SNR) follows a square root dependency, where longer integration times increase SNR proportionally to the square root of the integration period. However, this theoretical improvement faces practical limitations in real-world ToF applications. Extended integration periods can lead to motion artifacts when capturing dynamic scenes, as movement during capture results in blurring and depth inconsistencies.
Several adaptive integration time strategies have emerged to address these challenges. Multi-exposure techniques utilize multiple captures with varying integration times, combining the advantages of short exposures (reduced motion artifacts, better handling of bright reflections) with longer exposures (improved SNR in low-reflectivity regions). These captures are then intelligently merged using weighted averaging or more sophisticated fusion algorithms.
Scene-aware integration time control represents another significant advancement, where the system analyzes scene characteristics in real-time to dynamically adjust integration parameters. This approach typically employs a feedback loop that evaluates metrics such as amplitude strength, pixel saturation levels, and estimated depth variance to continuously optimize integration settings for specific environmental conditions.
Hardware-level optimizations complement these algorithmic approaches. Modern ToF sensors increasingly incorporate per-pixel integration time control, allowing different regions of the same frame to use optimized exposure settings. This capability proves particularly valuable in scenes with high dynamic range, where bright and dark objects coexist.
Temperature compensation mechanisms have also become essential components of integration time optimization strategies, as thermal drift significantly impacts ToF sensor performance. By modeling the relationship between operating temperature and optimal integration parameters, systems can maintain consistent depth precision across varying thermal conditions.
The trade-off between frame rate and integration time presents another optimization dimension. Application-specific requirements often dictate this balance, with high-speed tracking applications favoring shorter integration times despite reduced precision, while static object scanning may prioritize longer integration periods for maximum depth accuracy.
Environmental Factors Affecting ToF Performance
Time-of-Flight (ToF) depth sensing technology operates by measuring the time taken for light to travel to an object and back, but its performance is significantly influenced by various environmental factors. Ambient light represents one of the most critical challenges, as excessive sunlight or artificial illumination can overwhelm the ToF sensor's ability to detect its own emitted light signals, resulting in reduced accuracy or complete failure in outdoor or brightly lit environments.
Temperature variations constitute another substantial factor affecting ToF performance. Sensor electronics exhibit temperature-dependent behavior that can alter signal timing and processing characteristics. Without proper temperature compensation algorithms, ToF systems may experience drift in depth measurements as operating temperatures change, particularly in industrial applications where environmental conditions fluctuate significantly.
Surface properties of target objects dramatically impact measurement quality. Highly reflective surfaces can cause oversaturation of the sensor, while very dark or light-absorbing materials may return insufficient signal for accurate depth calculation. Transparent or translucent objects present particular challenges as they create multiple reflection paths, confusing the sensor's timing mechanisms and producing erroneous depth values.
Atmospheric conditions introduce additional complexities. Water vapor, dust, fog, or smoke particles in the air can scatter the emitted light, creating noise in the return signal and reducing the effective range of ToF systems. This limitation becomes particularly problematic in outdoor applications or industrial environments with airborne particulates.
Multi-path interference occurs when the emitted light reflects off multiple surfaces before returning to the sensor, creating timing ambiguities. This phenomenon is especially prevalent in corner scenarios or complex geometrical environments, leading to ghost artifacts or inaccurate depth measurements at object boundaries.
Motion in the scene presents temporal challenges for ToF systems. Rapid movement of objects during the integration time can cause motion blur in depth maps, similar to traditional photography but affecting depth values rather than color information. This becomes particularly relevant when considering the trade-off between integration time and measurement precision in dynamic environments.
Understanding these environmental factors is crucial for developing robust ToF systems with appropriate compensation mechanisms. Advanced filtering algorithms, multi-frequency approaches, and adaptive integration time control represent potential solutions to mitigate these environmental challenges and improve the reliability of ToF depth sensing across diverse operating conditions.
Temperature variations constitute another substantial factor affecting ToF performance. Sensor electronics exhibit temperature-dependent behavior that can alter signal timing and processing characteristics. Without proper temperature compensation algorithms, ToF systems may experience drift in depth measurements as operating temperatures change, particularly in industrial applications where environmental conditions fluctuate significantly.
Surface properties of target objects dramatically impact measurement quality. Highly reflective surfaces can cause oversaturation of the sensor, while very dark or light-absorbing materials may return insufficient signal for accurate depth calculation. Transparent or translucent objects present particular challenges as they create multiple reflection paths, confusing the sensor's timing mechanisms and producing erroneous depth values.
Atmospheric conditions introduce additional complexities. Water vapor, dust, fog, or smoke particles in the air can scatter the emitted light, creating noise in the return signal and reducing the effective range of ToF systems. This limitation becomes particularly problematic in outdoor applications or industrial environments with airborne particulates.
Multi-path interference occurs when the emitted light reflects off multiple surfaces before returning to the sensor, creating timing ambiguities. This phenomenon is especially prevalent in corner scenarios or complex geometrical environments, leading to ghost artifacts or inaccurate depth measurements at object boundaries.
Motion in the scene presents temporal challenges for ToF systems. Rapid movement of objects during the integration time can cause motion blur in depth maps, similar to traditional photography but affecting depth values rather than color information. This becomes particularly relevant when considering the trade-off between integration time and measurement precision in dynamic environments.
Understanding these environmental factors is crucial for developing robust ToF systems with appropriate compensation mechanisms. Advanced filtering algorithms, multi-frequency approaches, and adaptive integration time control represent potential solutions to mitigate these environmental challenges and improve the reliability of ToF depth sensing across diverse operating conditions.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!