Humanoid robot quick walking tracking obstacle avoidance implement method
A realization method and robot technology, applied in the field of robots, can solve problems such as low control precision and unstable walking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
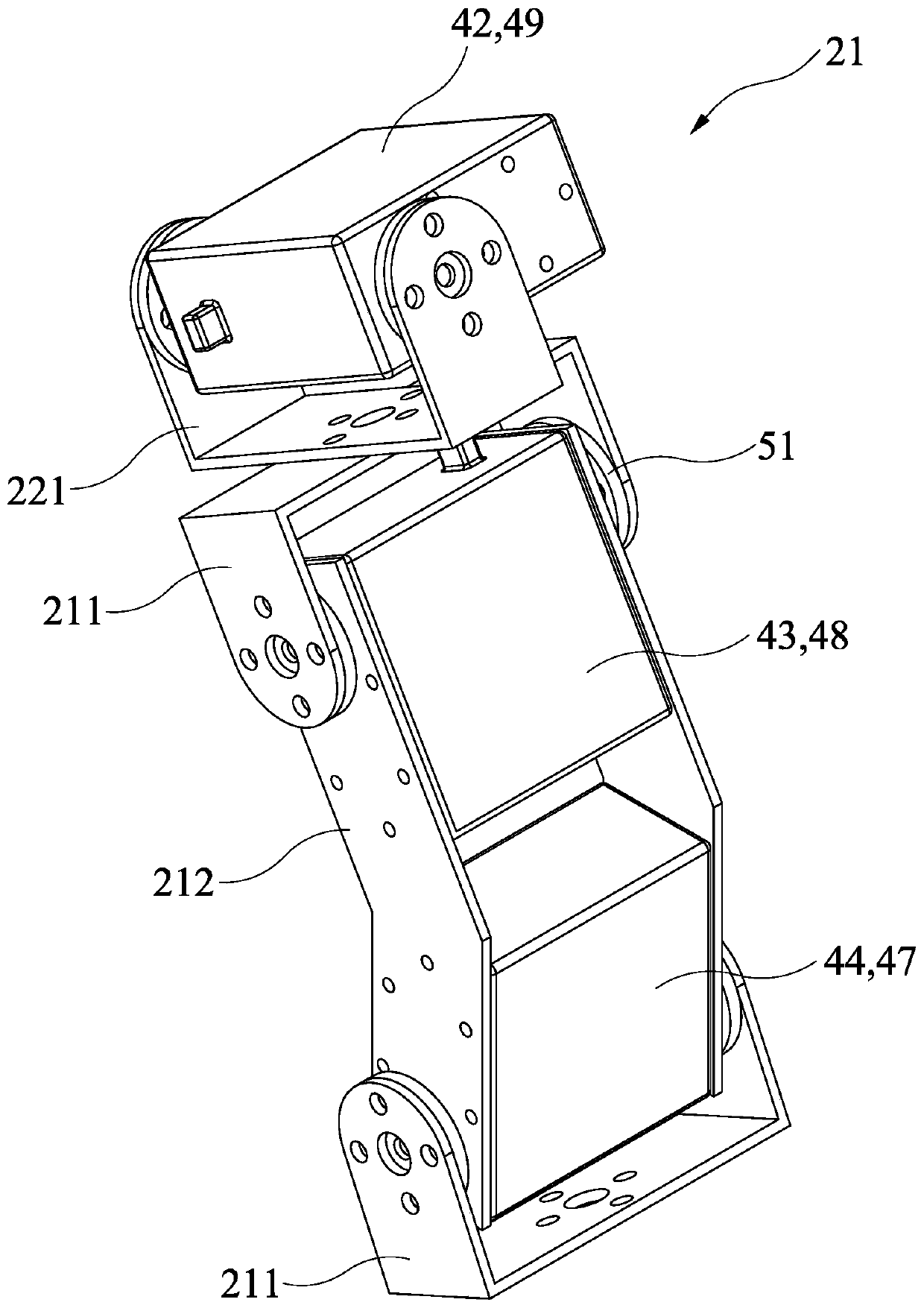
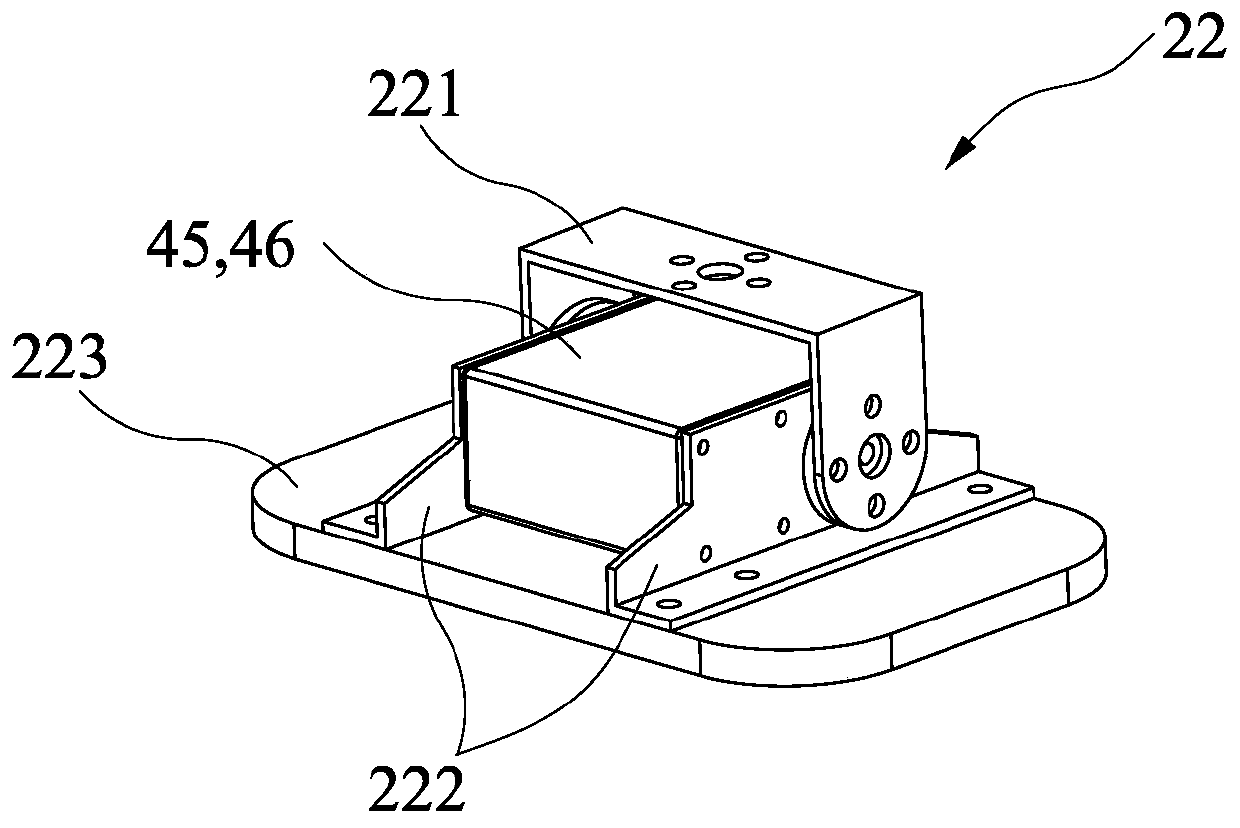
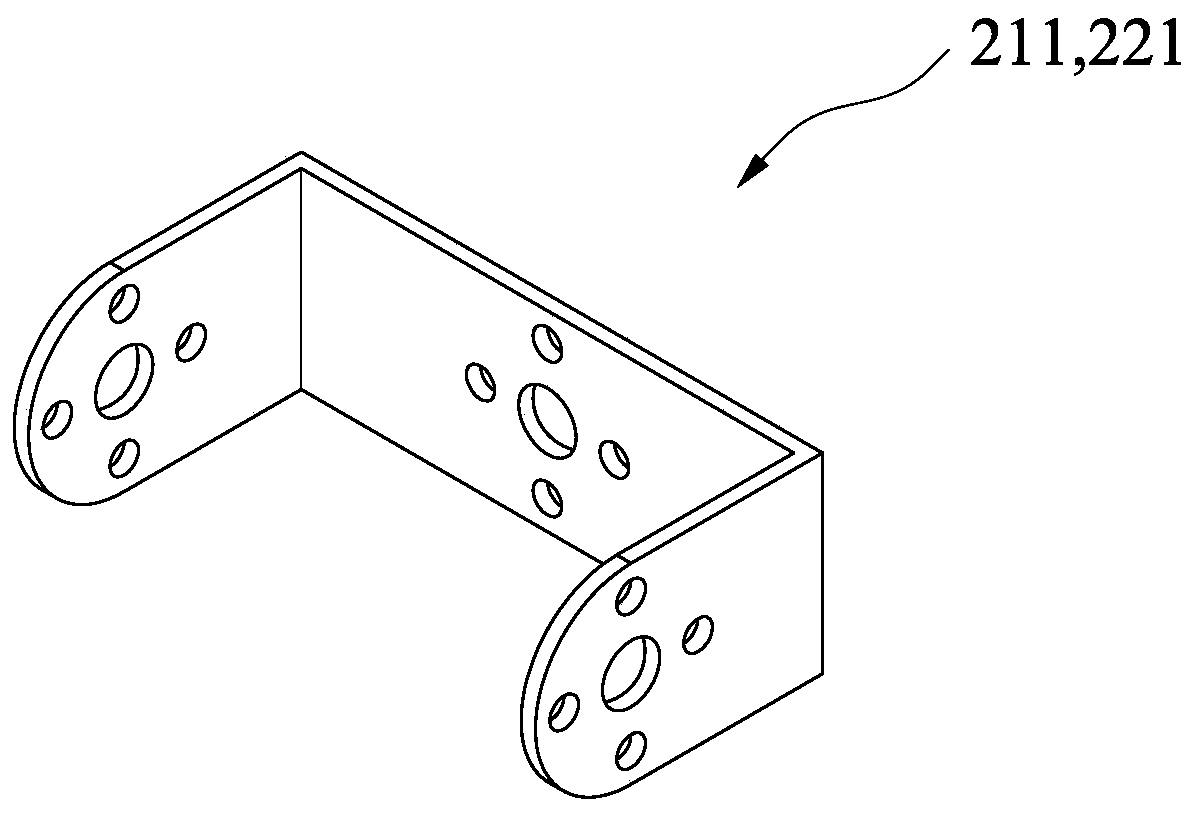
[0035] A method for implementing fast walking and obstacle avoidance of a humanoid robot disclosed by the present invention, see Figure 1-13 , the method involves a humanoid fast walking tracking obstacle avoidance robot, the robot includes two mechanical legs 2 and an upper body 1 equipped with an Openmv machine vision module and a power module, and the two mechanical legs 2 are symmetrically distributed under the upper body 1 .
[0036] Such as Figure 7 As shown, the exterior of the upper body 1 is mainly composed of the upper body top plate 11, the upper body top plate 12, the upper body front plate 13 and two upper body side plates 14, which form the interior of the upper body 1 with a chamber. The power module is placed inside the upper body 1. The power module Including the battery and the adhesive tape, which are placed in the top to bottom three-fifths of the upper body 1 and fixed by the adhesive tape to stabilize the center of gravity while reducing the weight of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More