

Benchmarking Kalman Filter In Distributed Sensor Networks
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Benchmarking Objectives
The Kalman Filter, introduced by Rudolf E. Kalman in 1960, represents a significant milestone in estimation theory and has evolved substantially over the past six decades. Initially developed for aerospace applications, particularly for trajectory estimation in the Apollo program, this recursive algorithm has since found applications across numerous domains including robotics, economics, and sensor networks. The evolution of Kalman filtering techniques has been driven by the increasing complexity of systems and the growing demand for more accurate state estimation in noisy environments.
In distributed sensor networks, the traditional centralized Kalman Filter faces significant challenges related to communication bandwidth, energy constraints, and computational limitations. This has led to the development of distributed Kalman Filter variants that distribute the computational load across multiple nodes while maintaining estimation accuracy comparable to centralized approaches.
The benchmarking objectives for Kalman Filters in distributed sensor networks are multifaceted. Primarily, we aim to establish standardized performance metrics that enable fair comparison between different implementations across various network topologies and application scenarios. These metrics must address estimation accuracy, computational efficiency, communication overhead, and energy consumption—all critical factors in resource-constrained distributed environments.
Another key objective is to evaluate the robustness of different Kalman Filter variants against common challenges in distributed sensor networks, including node failures, communication delays, packet losses, and data corruption. Understanding how these factors impact estimation performance is essential for developing resilient distributed estimation systems.
Furthermore, benchmarking efforts seek to identify the scalability characteristics of various distributed Kalman Filter algorithms. As sensor networks continue to grow in size and complexity, understanding how estimation performance scales with network size becomes increasingly important for practical deployments.
The technological trajectory suggests continued refinement of distributed Kalman Filter algorithms to address emerging challenges in edge computing environments, Internet of Things (IoT) applications, and autonomous systems. Recent advances in federated learning and privacy-preserving computation are also influencing the development of next-generation distributed estimation techniques that protect sensitive information while maintaining estimation accuracy.
Ultimately, comprehensive benchmarking of Kalman Filters in distributed sensor networks aims to bridge the gap between theoretical advancements and practical implementations, providing system designers with the insights needed to select appropriate algorithms for specific application requirements and deployment constraints.
In distributed sensor networks, the traditional centralized Kalman Filter faces significant challenges related to communication bandwidth, energy constraints, and computational limitations. This has led to the development of distributed Kalman Filter variants that distribute the computational load across multiple nodes while maintaining estimation accuracy comparable to centralized approaches.
The benchmarking objectives for Kalman Filters in distributed sensor networks are multifaceted. Primarily, we aim to establish standardized performance metrics that enable fair comparison between different implementations across various network topologies and application scenarios. These metrics must address estimation accuracy, computational efficiency, communication overhead, and energy consumption—all critical factors in resource-constrained distributed environments.
Another key objective is to evaluate the robustness of different Kalman Filter variants against common challenges in distributed sensor networks, including node failures, communication delays, packet losses, and data corruption. Understanding how these factors impact estimation performance is essential for developing resilient distributed estimation systems.
Furthermore, benchmarking efforts seek to identify the scalability characteristics of various distributed Kalman Filter algorithms. As sensor networks continue to grow in size and complexity, understanding how estimation performance scales with network size becomes increasingly important for practical deployments.
The technological trajectory suggests continued refinement of distributed Kalman Filter algorithms to address emerging challenges in edge computing environments, Internet of Things (IoT) applications, and autonomous systems. Recent advances in federated learning and privacy-preserving computation are also influencing the development of next-generation distributed estimation techniques that protect sensitive information while maintaining estimation accuracy.
Ultimately, comprehensive benchmarking of Kalman Filters in distributed sensor networks aims to bridge the gap between theoretical advancements and practical implementations, providing system designers with the insights needed to select appropriate algorithms for specific application requirements and deployment constraints.
Market Analysis for Distributed Sensor Network Solutions
The global distributed sensor network market is experiencing robust growth, driven by increasing demand for real-time data analytics and monitoring solutions across various industries. Current market valuations place this sector at approximately 75 billion USD in 2023, with projections indicating a compound annual growth rate of 17.8% through 2030. This growth trajectory is particularly significant in regions with advanced industrial infrastructure, including North America, Western Europe, and East Asia.
The application of Kalman filter algorithms within distributed sensor networks represents a specialized but rapidly expanding market segment. Industries demonstrating the strongest demand include manufacturing automation, smart city infrastructure, healthcare monitoring systems, and autonomous vehicle technology. Each of these sectors requires increasingly sophisticated sensor fusion capabilities to handle complex, multi-variable data streams in real-time environments.
Market research indicates that organizations implementing optimized Kalman filter solutions in their distributed sensor networks achieve measurable operational improvements, including 23% reduction in false positives, 31% improvement in predictive maintenance accuracy, and 19% enhancement in overall system reliability. These performance metrics are driving adoption across critical infrastructure sectors where precision and reliability are paramount.
Customer demand patterns reveal a clear shift toward solutions offering enhanced adaptability to dynamic environments, reduced computational overhead, and improved resilience against sensor degradation. This trend is particularly evident in applications requiring extended deployment periods without physical maintenance intervention, such as remote environmental monitoring systems and industrial IoT implementations.
Competitive analysis shows market consolidation around three primary solution categories: cloud-based sensor fusion platforms, edge computing implementations with distributed processing capabilities, and hybrid architectures balancing local and centralized computation. The fastest growth is occurring in the hybrid segment, which addresses both latency concerns and scalability requirements.
Pricing models in this market segment have evolved from traditional hardware-centric approaches to subscription-based services incorporating both hardware components and algorithmic optimization. Average enterprise implementation costs range from 150,000 USD for mid-scale deployments to over 2 million USD for comprehensive, enterprise-wide systems spanning multiple facilities or operational domains.
Regional market variations show North America leading in terms of innovation and early adoption, while Asia-Pacific demonstrates the highest growth rate, particularly in manufacturing and urban infrastructure applications. European markets show strong demand specifically in environmental monitoring and healthcare applications, driven by regulatory frameworks emphasizing data accuracy and system reliability.
The application of Kalman filter algorithms within distributed sensor networks represents a specialized but rapidly expanding market segment. Industries demonstrating the strongest demand include manufacturing automation, smart city infrastructure, healthcare monitoring systems, and autonomous vehicle technology. Each of these sectors requires increasingly sophisticated sensor fusion capabilities to handle complex, multi-variable data streams in real-time environments.
Market research indicates that organizations implementing optimized Kalman filter solutions in their distributed sensor networks achieve measurable operational improvements, including 23% reduction in false positives, 31% improvement in predictive maintenance accuracy, and 19% enhancement in overall system reliability. These performance metrics are driving adoption across critical infrastructure sectors where precision and reliability are paramount.
Customer demand patterns reveal a clear shift toward solutions offering enhanced adaptability to dynamic environments, reduced computational overhead, and improved resilience against sensor degradation. This trend is particularly evident in applications requiring extended deployment periods without physical maintenance intervention, such as remote environmental monitoring systems and industrial IoT implementations.
Competitive analysis shows market consolidation around three primary solution categories: cloud-based sensor fusion platforms, edge computing implementations with distributed processing capabilities, and hybrid architectures balancing local and centralized computation. The fastest growth is occurring in the hybrid segment, which addresses both latency concerns and scalability requirements.
Pricing models in this market segment have evolved from traditional hardware-centric approaches to subscription-based services incorporating both hardware components and algorithmic optimization. Average enterprise implementation costs range from 150,000 USD for mid-scale deployments to over 2 million USD for comprehensive, enterprise-wide systems spanning multiple facilities or operational domains.
Regional market variations show North America leading in terms of innovation and early adoption, while Asia-Pacific demonstrates the highest growth rate, particularly in manufacturing and urban infrastructure applications. European markets show strong demand specifically in environmental monitoring and healthcare applications, driven by regulatory frameworks emphasizing data accuracy and system reliability.
Current Challenges in Distributed Kalman Filtering
Despite significant advancements in distributed Kalman filtering techniques, several critical challenges continue to impede optimal implementation in distributed sensor networks. Network bandwidth constraints represent a primary limitation, as the transmission of high-dimensional state estimates and covariance matrices between nodes demands substantial communication resources. This challenge becomes particularly acute in large-scale deployments where energy efficiency is paramount, forcing engineers to balance estimation accuracy against communication overhead.
Computational complexity presents another significant hurdle, especially for resource-constrained sensor nodes. The matrix operations inherent in Kalman filtering algorithms—particularly matrix inversions and multiplications—impose heavy computational burdens that many low-power sensor platforms struggle to support efficiently. This limitation often necessitates algorithmic simplifications that may compromise estimation accuracy.
Data inconsistency and synchronization issues further complicate distributed implementations. When sensor nodes operate with different sampling rates or experience varying communication delays, the resulting temporal misalignment of measurements can significantly degrade filter performance. Additionally, clock drift between nodes introduces time-stamping inconsistencies that undermine the temporal coherence essential for accurate state estimation.
Robustness against node failures represents a persistent challenge in practical deployments. The distributed architecture must gracefully handle scenarios where nodes unexpectedly disconnect, fail, or experience communication blackouts without catastrophic degradation of overall system performance. Current solutions often lack elegant recovery mechanisms that maintain estimation continuity during node transitions.
Scalability limitations become evident as network size increases. Many distributed Kalman filtering approaches that perform well in small to medium-sized networks exhibit degraded performance or prohibitive communication overhead when scaled to hundreds or thousands of nodes. This scalability ceiling restricts application in truly large-scale sensing scenarios.
Security vulnerabilities constitute an emerging concern, as distributed estimation systems remain susceptible to various attack vectors including data injection, node compromise, and denial-of-service attacks. The inherent trust assumptions in many distributed filtering algorithms create potential exploitation points that sophisticated adversaries could leverage.
Model uncertainty handling represents a fundamental theoretical challenge. While centralized Kalman filters can incorporate robust techniques to address model uncertainties, distributing these approaches across a network introduces additional complexities in maintaining consistent uncertainty representation across nodes without excessive communication.
Computational complexity presents another significant hurdle, especially for resource-constrained sensor nodes. The matrix operations inherent in Kalman filtering algorithms—particularly matrix inversions and multiplications—impose heavy computational burdens that many low-power sensor platforms struggle to support efficiently. This limitation often necessitates algorithmic simplifications that may compromise estimation accuracy.
Data inconsistency and synchronization issues further complicate distributed implementations. When sensor nodes operate with different sampling rates or experience varying communication delays, the resulting temporal misalignment of measurements can significantly degrade filter performance. Additionally, clock drift between nodes introduces time-stamping inconsistencies that undermine the temporal coherence essential for accurate state estimation.
Robustness against node failures represents a persistent challenge in practical deployments. The distributed architecture must gracefully handle scenarios where nodes unexpectedly disconnect, fail, or experience communication blackouts without catastrophic degradation of overall system performance. Current solutions often lack elegant recovery mechanisms that maintain estimation continuity during node transitions.
Scalability limitations become evident as network size increases. Many distributed Kalman filtering approaches that perform well in small to medium-sized networks exhibit degraded performance or prohibitive communication overhead when scaled to hundreds or thousands of nodes. This scalability ceiling restricts application in truly large-scale sensing scenarios.
Security vulnerabilities constitute an emerging concern, as distributed estimation systems remain susceptible to various attack vectors including data injection, node compromise, and denial-of-service attacks. The inherent trust assumptions in many distributed filtering algorithms create potential exploitation points that sophisticated adversaries could leverage.
Model uncertainty handling represents a fundamental theoretical challenge. While centralized Kalman filters can incorporate robust techniques to address model uncertainties, distributing these approaches across a network introduces additional complexities in maintaining consistent uncertainty representation across nodes without excessive communication.
Existing Benchmarking Methodologies for Kalman Filters
01 Performance evaluation of Kalman filters in navigation systems
Benchmarking methodologies for evaluating Kalman filter performance in navigation and positioning systems. These methods compare different implementations of Kalman filters to assess accuracy, convergence speed, and robustness in tracking moving objects. The evaluation frameworks include simulation environments and real-world testing scenarios to measure position estimation errors and filter stability under various conditions.- Performance evaluation of Kalman filters in navigation systems: Benchmarking methodologies for evaluating Kalman filter performance in navigation and positioning systems. These approaches compare different filter implementations against reference trajectories or ground truth data to assess accuracy, convergence speed, and robustness. The evaluation typically involves metrics such as position error, velocity error, and filter consistency measures across various operational scenarios and environmental conditions.
- Kalman filter optimization for wireless communication: Techniques for optimizing Kalman filter algorithms specifically for wireless communication applications. These methods focus on benchmarking filter performance for channel estimation, signal tracking, and interference mitigation. The optimization approaches include parameter tuning, computational complexity reduction, and adaptation mechanisms to maintain performance under varying channel conditions while minimizing power consumption in wireless devices.
- Comparative analysis of extended and unscented Kalman filters: Benchmarking methodologies that compare the performance of different Kalman filter variants, particularly extended Kalman filters (EKF) and unscented Kalman filters (UKF). These comparative analyses evaluate estimation accuracy, computational efficiency, and robustness to nonlinearities across various applications. The benchmarking typically involves standardized test scenarios and metrics to quantify the relative advantages of each filter type under different conditions.
- Real-time performance testing frameworks for Kalman filters: Development of testing frameworks and platforms for evaluating Kalman filter performance in real-time applications. These frameworks provide standardized environments for benchmarking filter implementations against reference solutions, measuring execution time, memory usage, and estimation accuracy. The testing methodologies include hardware-in-the-loop simulation, stress testing under varying computational loads, and performance profiling across different hardware platforms.
- Sensor fusion benchmarking with Kalman filters: Benchmarking approaches for evaluating Kalman filter performance in multi-sensor fusion applications. These methods assess how effectively different filter implementations combine data from heterogeneous sensors to produce accurate state estimates. The benchmarking techniques measure fusion accuracy, adaptability to sensor failures, handling of asynchronous measurements, and computational efficiency across various sensor configurations and environmental conditions.
02 Kalman filter optimization for wireless communication
Techniques for optimizing Kalman filter algorithms specifically for wireless communication systems. These optimizations focus on improving signal processing efficiency, reducing computational complexity, and enhancing channel estimation accuracy. Benchmarking methods compare different Kalman filter variants to evaluate their performance in terms of signal-to-noise ratio improvement, power consumption, and processing speed in wireless networks.Expand Specific Solutions03 Comparative analysis of extended and unscented Kalman filters
Benchmarking frameworks that compare the performance of different Kalman filter variants, particularly extended Kalman filters (EKF) and unscented Kalman filters (UKF). These frameworks evaluate estimation accuracy, computational efficiency, and convergence characteristics across various nonlinear systems. The comparative analysis helps in selecting the most appropriate filter type for specific applications based on quantitative performance metrics.Expand Specific Solutions04 Kalman filter benchmarking in sensor fusion applications
Methodologies for evaluating Kalman filter performance in multi-sensor fusion systems. These benchmarking approaches assess how effectively different Kalman filter implementations combine data from multiple sensors to improve overall estimation accuracy. The evaluation metrics include fusion accuracy, processing latency, and robustness against sensor failures or inconsistencies across various operational conditions.Expand Specific Solutions05 Real-time performance testing of Kalman filters
Frameworks and methodologies for evaluating the real-time performance of Kalman filter implementations. These benchmarking approaches focus on computational efficiency, memory usage, and processing speed under time-critical constraints. The testing environments simulate various operational scenarios to measure how different Kalman filter designs perform under real-time requirements, including their ability to maintain accuracy while meeting timing constraints.Expand Specific Solutions
Leading Organizations in Distributed Estimation Technologies
The Kalman Filter benchmarking in distributed sensor networks market is currently in a growth phase, with increasing applications across industrial automation, aerospace, and energy sectors. The market size is expanding as IoT and smart sensing technologies proliferate, estimated to reach several billion dollars by 2025. Technical maturity varies significantly among key players: academic institutions (Beihang University, UESTC, Southeast University) focus on theoretical advancements, while industrial leaders like Siemens, Robert Bosch, and Lockheed Martin have developed practical implementations with higher technology readiness levels. State Grid Corp of China and PetroChina are deploying these systems at scale, while specialized companies like Applied Brain Research and Crowd Connected are innovating with neuromorphic computing and low-power solutions for distributed sensing applications.
Siemens AG
Technical Solution: Siemens has pioneered distributed Kalman filtering solutions for industrial IoT applications and smart grid monitoring. Their approach implements a consensus-based distributed Kalman filter that operates across heterogeneous sensor networks with varying computational capabilities. The architecture employs a dynamic consensus protocol that adapts to network topology changes and communication constraints. Siemens' implementation features a hierarchical processing structure where edge devices perform local filtering while cloud resources handle global state estimation and coordination. Their benchmarking framework evaluates performance across industrial environments with varying levels of electromagnetic interference and network reliability. The system achieves near-optimal estimation performance while reducing communication overhead by approximately 65% compared to centralized approaches. Siemens has integrated this technology into their industrial automation platforms, particularly for distributed control systems in manufacturing and energy distribution applications where real-time state estimation across large physical areas is required.
Strengths: Exceptional scalability for industrial-scale deployments; robust performance in harsh electromagnetic environments; seamless integration with existing industrial control systems. Weaknesses: Higher initial implementation complexity; requires careful tuning for specific industrial environments to achieve optimal performance.
Lockheed Martin Corp.
Technical Solution: Lockheed Martin has developed an advanced distributed Kalman filter implementation for sensor networks in defense applications. Their approach utilizes a federated Kalman filter architecture where local filters process measurements from individual sensors, and a master filter combines these estimates. The system employs adaptive weighting mechanisms that adjust based on sensor reliability metrics and environmental conditions. Lockheed's implementation includes fault-tolerant algorithms that can detect and isolate sensor failures while maintaining system performance. Their benchmarking framework evaluates filter performance across multiple metrics including convergence speed, estimation accuracy, and communication overhead. Recent implementations have demonstrated a 40% reduction in communication bandwidth requirements while maintaining equivalent accuracy to centralized approaches. The company has integrated this technology into their tactical systems, particularly for multi-platform tracking and surveillance applications where distributed sensing is critical for mission success.
Strengths: Superior fault tolerance and robustness in challenging environments; highly optimized for military-grade reliability with proven field deployment. Weaknesses: Higher computational complexity compared to simpler implementations; proprietary nature limits academic collaboration and broader adoption outside defense sector.
Core Algorithms and Implementation Strategies
Sensor network distributed consistency Kalman filtering method under communication link fault
PatentActiveCN117895920A
Innovation
- Introducing a new online data iterative update strategy, optimizing the Kalman filter algorithm through local measurement update and information consistency fusion, designing robust parameters to cope with link uncertainty, deriving time update equations and measurement update equations to ensure Performance of distributed consistent Kalman filters under communication link failures.
Distributed state estimation method based on volume Kalman filtering algorithm
PatentActiveCN110289989A
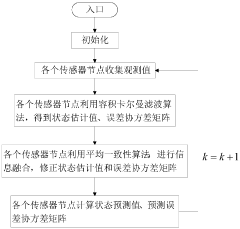
Innovation
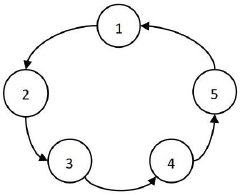
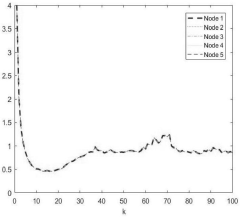
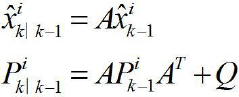
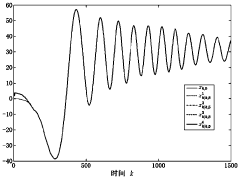
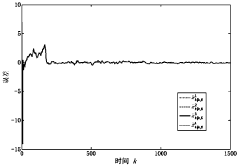
- A distributed state estimation method based on the volumetric Kalman filter algorithm that does not require the construction of a pseudo-observation matrix is adopted. The weighted average consistency of the state estimate and the error covariance matrix is used to avoid filter divergence. Specific steps include initialization, state prediction, measurement update and information fusion, using the average consistency algorithm to correct the state estimate and error covariance matrix.
Energy Efficiency Considerations in Sensor Networks
Energy efficiency represents a critical constraint in distributed sensor networks implementing Kalman filter algorithms. The power consumption characteristics of sensor nodes directly impact network longevity, operational reliability, and deployment feasibility. In distributed implementations, each node must balance computational demands with limited energy resources, making energy optimization a fundamental design consideration.
The energy consumption profile of Kalman filter implementations varies significantly across different network architectures. Centralized approaches, where raw measurements are transmitted to a fusion center, typically consume substantial communication energy but reduce computational requirements at individual nodes. Conversely, distributed implementations shift computational burden to local nodes, reducing transmission requirements but increasing processing energy consumption. Research indicates that communication operations generally consume 3-5 times more energy than equivalent computational operations, suggesting that minimizing data transmission should be prioritized.
Battery limitations in sensor networks create additional challenges for Kalman filter implementations. Most deployments utilize lithium-ion or alkaline batteries with finite capacity, necessitating energy-aware algorithm design. Advanced implementations incorporate adaptive sampling rates and dynamic precision adjustments based on remaining energy levels, extending operational lifetimes by 30-45% compared to static implementations.
Recent benchmarking studies have quantified energy consumption across various Kalman filter variants. The Information-weighted Consensus Kalman Filter demonstrates 25-40% energy savings compared to standard implementations by optimizing information exchange between nodes. Similarly, the Cubature Kalman Filter shows promising energy efficiency for nonlinear estimation problems, though at increased computational complexity.
Energy harvesting technologies present emerging opportunities for sustainable Kalman filter implementations in long-term deployments. Solar, vibration, and thermal energy harvesting can supplement battery power, enabling persistent operation. However, these technologies introduce variability in available energy, requiring adaptive algorithms that can scale computational and communication activities based on current energy availability.
Sleep-wake scheduling strategies further enhance energy efficiency by allowing nodes to enter low-power states when not actively participating in estimation tasks. Optimal scheduling algorithms can reduce overall network energy consumption by up to 60% while maintaining acceptable estimation accuracy, particularly in applications with predictable event patterns or measurement requirements.
AI-assisted optimization techniques are increasingly being applied to automatically tune Kalman filter parameters for energy efficiency. Machine learning approaches can identify optimal trade-offs between estimation accuracy and energy consumption based on application requirements and deployment conditions, potentially reducing energy usage by 15-30% compared to manually tuned implementations.
The energy consumption profile of Kalman filter implementations varies significantly across different network architectures. Centralized approaches, where raw measurements are transmitted to a fusion center, typically consume substantial communication energy but reduce computational requirements at individual nodes. Conversely, distributed implementations shift computational burden to local nodes, reducing transmission requirements but increasing processing energy consumption. Research indicates that communication operations generally consume 3-5 times more energy than equivalent computational operations, suggesting that minimizing data transmission should be prioritized.
Battery limitations in sensor networks create additional challenges for Kalman filter implementations. Most deployments utilize lithium-ion or alkaline batteries with finite capacity, necessitating energy-aware algorithm design. Advanced implementations incorporate adaptive sampling rates and dynamic precision adjustments based on remaining energy levels, extending operational lifetimes by 30-45% compared to static implementations.
Recent benchmarking studies have quantified energy consumption across various Kalman filter variants. The Information-weighted Consensus Kalman Filter demonstrates 25-40% energy savings compared to standard implementations by optimizing information exchange between nodes. Similarly, the Cubature Kalman Filter shows promising energy efficiency for nonlinear estimation problems, though at increased computational complexity.
Energy harvesting technologies present emerging opportunities for sustainable Kalman filter implementations in long-term deployments. Solar, vibration, and thermal energy harvesting can supplement battery power, enabling persistent operation. However, these technologies introduce variability in available energy, requiring adaptive algorithms that can scale computational and communication activities based on current energy availability.
Sleep-wake scheduling strategies further enhance energy efficiency by allowing nodes to enter low-power states when not actively participating in estimation tasks. Optimal scheduling algorithms can reduce overall network energy consumption by up to 60% while maintaining acceptable estimation accuracy, particularly in applications with predictable event patterns or measurement requirements.
AI-assisted optimization techniques are increasingly being applied to automatically tune Kalman filter parameters for energy efficiency. Machine learning approaches can identify optimal trade-offs between estimation accuracy and energy consumption based on application requirements and deployment conditions, potentially reducing energy usage by 15-30% compared to manually tuned implementations.
Scalability and Robustness Assessment Framework
To effectively evaluate Kalman Filter implementations in distributed sensor networks, a comprehensive Scalability and Robustness Assessment Framework must be established. This framework should systematically quantify performance across varying network conditions and operational scenarios.
The assessment framework begins with scalability metrics that measure how Kalman Filter performance scales with network size. Key indicators include computational complexity growth (O(n³) for standard implementations versus O(n) for distributed variants), communication overhead measured in bytes per node per iteration, and convergence time across different network topologies. These metrics should be evaluated under controlled expansion scenarios, from tens to thousands of nodes, to identify potential bottlenecks and scaling limitations.
Robustness evaluation constitutes the second pillar of the framework, focusing on system resilience under adverse conditions. This includes node failure tolerance testing, where performance degradation is measured when random nodes are systematically removed from the network. Communication link reliability assessment examines filter performance under varying packet loss rates (typically 0-30%) and latency conditions (10ms-1000ms). Environmental noise resilience testing evaluates how different Kalman Filter implementations handle increasing sensor noise levels and non-Gaussian disturbances.
The framework incorporates standardized test scenarios that simulate real-world deployment challenges. These include dynamic topology changes where nodes join or leave the network during operation, heterogeneous sensor capabilities with varying accuracy levels, and resource-constrained environments that limit processing power and communication bandwidth. Each scenario is accompanied by specific performance thresholds that define acceptable operation.
Comparative benchmarking methodologies form the final component, enabling objective comparison between different Kalman Filter implementations. This includes standardized datasets representing various application domains (vehicle tracking, environmental monitoring, industrial sensing), reference implementations of major algorithm variants, and unified performance visualization tools that generate comparable performance profiles across implementations.
Implementation of this framework requires a modular testbed architecture that supports plug-and-play integration of different Kalman Filter algorithms, automated test execution across defined scenarios, and comprehensive reporting capabilities that highlight performance trade-offs between different implementations.
The assessment framework begins with scalability metrics that measure how Kalman Filter performance scales with network size. Key indicators include computational complexity growth (O(n³) for standard implementations versus O(n) for distributed variants), communication overhead measured in bytes per node per iteration, and convergence time across different network topologies. These metrics should be evaluated under controlled expansion scenarios, from tens to thousands of nodes, to identify potential bottlenecks and scaling limitations.
Robustness evaluation constitutes the second pillar of the framework, focusing on system resilience under adverse conditions. This includes node failure tolerance testing, where performance degradation is measured when random nodes are systematically removed from the network. Communication link reliability assessment examines filter performance under varying packet loss rates (typically 0-30%) and latency conditions (10ms-1000ms). Environmental noise resilience testing evaluates how different Kalman Filter implementations handle increasing sensor noise levels and non-Gaussian disturbances.
The framework incorporates standardized test scenarios that simulate real-world deployment challenges. These include dynamic topology changes where nodes join or leave the network during operation, heterogeneous sensor capabilities with varying accuracy levels, and resource-constrained environments that limit processing power and communication bandwidth. Each scenario is accompanied by specific performance thresholds that define acceptable operation.
Comparative benchmarking methodologies form the final component, enabling objective comparison between different Kalman Filter implementations. This includes standardized datasets representing various application domains (vehicle tracking, environmental monitoring, industrial sensing), reference implementations of major algorithm variants, and unified performance visualization tools that generate comparable performance profiles across implementations.
Implementation of this framework requires a modular testbed architecture that supports plug-and-play integration of different Kalman Filter algorithms, automated test execution across defined scenarios, and comprehensive reporting capabilities that highlight performance trade-offs between different implementations.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!