

Kalman Filter In Space Missions: Navigation Accuracy
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Space Navigation Background and Objectives
Space navigation has evolved significantly since the dawn of space exploration in the 1950s. Initially, spacecraft relied on ground-based tracking systems and basic inertial guidance. The development of space navigation technology accelerated during the Cold War space race, with both the United States and Soviet Union investing heavily in improving navigation accuracy for military and scientific purposes.
The fundamental challenge of space navigation lies in determining a spacecraft's position, velocity, and orientation with high precision in the vast emptiness of space. Early missions accepted relatively large position uncertainties, sometimes on the order of kilometers. Modern missions, however, often require accuracy within meters or even centimeters, particularly for operations such as docking, landing, and formation flying.
Kalman filtering emerged as a revolutionary approach to space navigation in the 1960s, first gaining prominence during the Apollo program. Rudolf E. Kalman's mathematical framework provided a recursive solution to the discrete-data linear filtering problem, allowing for real-time processing of noisy sensor data to produce optimal estimates of system states. This innovation transformed space navigation by enabling continuous correction of trajectory estimates based on ongoing measurements.
The objectives of modern space navigation systems extend beyond basic position determination to include autonomous operation, fault detection, and adaptation to changing mission parameters. As missions venture farther from Earth and communication delays increase, the need for onboard autonomous navigation becomes critical. Deep space missions to Mars, asteroids, and beyond require navigation systems that can function with minimal ground intervention.
Current technological goals in space navigation focus on enhancing the accuracy, reliability, and autonomy of Kalman filter implementations. Research aims to develop filters that can handle highly nonlinear dynamics, incorporate diverse sensor inputs, and adapt to unexpected environmental conditions. Advanced variants such as the Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and particle filters address these challenges by extending the original algorithm's capabilities.
The integration of Kalman filtering with other technologies, such as optical navigation, LIDAR, and machine learning algorithms, represents a frontier in space navigation research. These hybrid approaches promise to overcome limitations of traditional methods and enable new mission profiles that were previously impossible due to navigation constraints.
As commercial space activities expand and new countries join the space sector, the demand for accessible, reliable navigation technology continues to grow. The democratization of space navigation technology has become an important objective, with efforts to develop open-source algorithms and affordable hardware solutions that maintain high performance standards.
The fundamental challenge of space navigation lies in determining a spacecraft's position, velocity, and orientation with high precision in the vast emptiness of space. Early missions accepted relatively large position uncertainties, sometimes on the order of kilometers. Modern missions, however, often require accuracy within meters or even centimeters, particularly for operations such as docking, landing, and formation flying.
Kalman filtering emerged as a revolutionary approach to space navigation in the 1960s, first gaining prominence during the Apollo program. Rudolf E. Kalman's mathematical framework provided a recursive solution to the discrete-data linear filtering problem, allowing for real-time processing of noisy sensor data to produce optimal estimates of system states. This innovation transformed space navigation by enabling continuous correction of trajectory estimates based on ongoing measurements.
The objectives of modern space navigation systems extend beyond basic position determination to include autonomous operation, fault detection, and adaptation to changing mission parameters. As missions venture farther from Earth and communication delays increase, the need for onboard autonomous navigation becomes critical. Deep space missions to Mars, asteroids, and beyond require navigation systems that can function with minimal ground intervention.
Current technological goals in space navigation focus on enhancing the accuracy, reliability, and autonomy of Kalman filter implementations. Research aims to develop filters that can handle highly nonlinear dynamics, incorporate diverse sensor inputs, and adapt to unexpected environmental conditions. Advanced variants such as the Extended Kalman Filter (EKF), Unscented Kalman Filter (UKF), and particle filters address these challenges by extending the original algorithm's capabilities.
The integration of Kalman filtering with other technologies, such as optical navigation, LIDAR, and machine learning algorithms, represents a frontier in space navigation research. These hybrid approaches promise to overcome limitations of traditional methods and enable new mission profiles that were previously impossible due to navigation constraints.
As commercial space activities expand and new countries join the space sector, the demand for accessible, reliable navigation technology continues to grow. The democratization of space navigation technology has become an important objective, with efforts to develop open-source algorithms and affordable hardware solutions that maintain high performance standards.
Market Analysis for Space Navigation Systems
The global market for space navigation systems has witnessed substantial growth in recent years, driven by increasing space missions and the critical need for precise navigation. Currently valued at approximately $12.5 billion, this market is projected to reach $18.7 billion by 2027, representing a compound annual growth rate of 8.4%. This growth trajectory is primarily fueled by the expanding commercial space sector, government space initiatives, and the rising demand for satellite-based services.
The market segmentation reveals distinct categories based on application areas. Satellite navigation systems dominate with a 45% market share, followed by spacecraft guidance systems at 30%, planetary rovers at 15%, and other applications comprising the remaining 10%. Kalman filter technology, as a critical component of these navigation systems, represents a specialized sub-segment valued at approximately $3.2 billion.
Geographically, North America leads the market with 42% share, attributed to NASA's ongoing missions and the robust private space industry including SpaceX and Blue Origin. Europe follows with 28%, driven by ESA programs and companies like Airbus Defence and Space. Asia-Pacific represents the fastest-growing region at 18% annual growth, with China's ambitious space program and Japan's JAXA contributing significantly.
Customer demand analysis indicates evolving requirements for navigation systems. Government space agencies prioritize ultra-high precision and reliability for critical missions, while commercial operators focus on cost-effectiveness and integration capabilities. The emerging private space tourism sector demands systems that balance precision with operational simplicity.
Market trends show increasing integration of Kalman filters with other technologies such as artificial intelligence and machine learning to enhance predictive capabilities. There is growing demand for miniaturized navigation systems for small satellites and CubeSats, with market growth for these systems exceeding 12% annually.
Competitive analysis reveals that traditional aerospace contractors like Lockheed Martin, Boeing, and Thales Alenia Space control 65% of the high-end navigation systems market. However, specialized technology providers focusing exclusively on advanced navigation algorithms and Kalman filter implementations are gaining market share, particularly in the commercial segment.
The economic impact of improved navigation accuracy through advanced Kalman filtering extends beyond direct market value, potentially reducing mission costs by 15-20% through fuel savings and extended spacecraft operational lifetimes.
The market segmentation reveals distinct categories based on application areas. Satellite navigation systems dominate with a 45% market share, followed by spacecraft guidance systems at 30%, planetary rovers at 15%, and other applications comprising the remaining 10%. Kalman filter technology, as a critical component of these navigation systems, represents a specialized sub-segment valued at approximately $3.2 billion.
Geographically, North America leads the market with 42% share, attributed to NASA's ongoing missions and the robust private space industry including SpaceX and Blue Origin. Europe follows with 28%, driven by ESA programs and companies like Airbus Defence and Space. Asia-Pacific represents the fastest-growing region at 18% annual growth, with China's ambitious space program and Japan's JAXA contributing significantly.
Customer demand analysis indicates evolving requirements for navigation systems. Government space agencies prioritize ultra-high precision and reliability for critical missions, while commercial operators focus on cost-effectiveness and integration capabilities. The emerging private space tourism sector demands systems that balance precision with operational simplicity.
Market trends show increasing integration of Kalman filters with other technologies such as artificial intelligence and machine learning to enhance predictive capabilities. There is growing demand for miniaturized navigation systems for small satellites and CubeSats, with market growth for these systems exceeding 12% annually.
Competitive analysis reveals that traditional aerospace contractors like Lockheed Martin, Boeing, and Thales Alenia Space control 65% of the high-end navigation systems market. However, specialized technology providers focusing exclusively on advanced navigation algorithms and Kalman filter implementations are gaining market share, particularly in the commercial segment.
The economic impact of improved navigation accuracy through advanced Kalman filtering extends beyond direct market value, potentially reducing mission costs by 15-20% through fuel savings and extended spacecraft operational lifetimes.
Kalman Filter Technology Status and Challenges
Kalman Filter technology has evolved significantly since its introduction in the 1960s, with space missions serving as a critical application domain. Currently, the global landscape shows varying levels of technological maturity across different regions. The United States, through NASA and private aerospace companies like SpaceX, maintains leadership in implementing advanced Kalman Filter variants for spacecraft navigation. The European Space Agency follows closely, with significant contributions to filter optimization for interplanetary missions. China and Russia have also developed robust implementations, particularly for their respective lunar and Mars exploration programs.
The current state-of-the-art in Kalman Filter technology for space navigation encompasses several sophisticated variants. Extended Kalman Filters (EKF) remain the workhorse for many missions, handling nonlinear dynamics through linearization techniques. Unscented Kalman Filters (UKF) have gained prominence for high-precision applications where linearization errors become significant. Particle filters and ensemble methods represent the cutting edge for highly complex, non-Gaussian estimation problems in deep space missions.
Despite these advancements, several technical challenges persist. Filter divergence remains a critical issue, particularly during high-dynamic maneuvers or when sensor data becomes temporarily unavailable. This can lead to catastrophic navigation errors if not properly managed. Computational efficiency presents another significant challenge, as more sophisticated filter variants demand greater processing power—a limited resource on spacecraft with strict power and thermal constraints.
Sensor integration complexity continues to increase as missions incorporate diverse measurement sources including star trackers, sun sensors, accelerometers, and ranging data. Ensuring optimal fusion of these heterogeneous data streams while maintaining filter stability requires sophisticated tuning methodologies. Additionally, the harsh space environment introduces unique challenges, with radiation effects causing sensor degradation and potential computational glitches that can compromise filter performance.
Real-time implementation constraints further complicate matters, as mission-critical navigation decisions must often be made with minimal latency. This necessitates careful optimization of filter algorithms to balance accuracy with execution speed. For autonomous spacecraft operations, particularly during critical phases like planetary entry, descent, and landing, these constraints become even more pronounced.
The geographical distribution of expertise shows concentration in traditional space powers, though emerging space nations are rapidly developing capabilities. Research centers in the United States, Europe, and increasingly in Asia are pushing boundaries in adaptive filtering techniques and machine learning augmentation of traditional Kalman approaches to address these persistent challenges.
The current state-of-the-art in Kalman Filter technology for space navigation encompasses several sophisticated variants. Extended Kalman Filters (EKF) remain the workhorse for many missions, handling nonlinear dynamics through linearization techniques. Unscented Kalman Filters (UKF) have gained prominence for high-precision applications where linearization errors become significant. Particle filters and ensemble methods represent the cutting edge for highly complex, non-Gaussian estimation problems in deep space missions.
Despite these advancements, several technical challenges persist. Filter divergence remains a critical issue, particularly during high-dynamic maneuvers or when sensor data becomes temporarily unavailable. This can lead to catastrophic navigation errors if not properly managed. Computational efficiency presents another significant challenge, as more sophisticated filter variants demand greater processing power—a limited resource on spacecraft with strict power and thermal constraints.
Sensor integration complexity continues to increase as missions incorporate diverse measurement sources including star trackers, sun sensors, accelerometers, and ranging data. Ensuring optimal fusion of these heterogeneous data streams while maintaining filter stability requires sophisticated tuning methodologies. Additionally, the harsh space environment introduces unique challenges, with radiation effects causing sensor degradation and potential computational glitches that can compromise filter performance.
Real-time implementation constraints further complicate matters, as mission-critical navigation decisions must often be made with minimal latency. This necessitates careful optimization of filter algorithms to balance accuracy with execution speed. For autonomous spacecraft operations, particularly during critical phases like planetary entry, descent, and landing, these constraints become even more pronounced.
The geographical distribution of expertise shows concentration in traditional space powers, though emerging space nations are rapidly developing capabilities. Research centers in the United States, Europe, and increasingly in Asia are pushing boundaries in adaptive filtering techniques and machine learning augmentation of traditional Kalman approaches to address these persistent challenges.
Current Kalman Filter Implementation Methods
01 Integration of Kalman filters with GPS for improved navigation accuracy
Kalman filters can be integrated with GPS systems to enhance navigation accuracy by optimally combining satellite signals with other sensor data. This integration helps to reduce errors in position estimation, especially in challenging environments where GPS signals may be weak or unreliable. The filter continuously updates position estimates based on real-time measurements, providing more accurate navigation solutions than GPS alone.- Integration of Kalman filters with GPS for improved navigation accuracy: Kalman filters can be integrated with GPS systems to enhance navigation accuracy by optimally combining satellite signals with other sensor data. This integration helps to reduce errors in position estimation, especially in challenging environments where GPS signals may be weak or unreliable. The filter continuously updates position estimates based on real-time measurements, providing more accurate navigation solutions than GPS alone.
- Multi-sensor fusion techniques using Kalman filtering: Multi-sensor fusion techniques leverage Kalman filtering to combine data from various navigation sensors such as inertial measurement units (IMUs), magnetometers, and altimeters. By integrating multiple data sources, these systems can compensate for individual sensor limitations and provide more robust navigation solutions. The Kalman filter weighs each sensor input based on its estimated reliability, resulting in optimized navigation accuracy across diverse operational conditions.
- Adaptive and extended Kalman filter implementations for navigation: Adaptive and extended Kalman filter variants offer enhanced navigation accuracy for nonlinear systems. These advanced implementations dynamically adjust filter parameters based on changing environmental conditions and system states. Extended Kalman filters linearize nonlinear navigation models, while adaptive filters automatically tune their noise parameters to optimize performance. These sophisticated algorithms provide superior accuracy for complex navigation scenarios including aerial, marine, and autonomous vehicle applications.
- Error compensation techniques in Kalman filter-based navigation: Error compensation techniques in Kalman filter-based navigation systems focus on identifying and mitigating various error sources that affect accuracy. These methods address sensor biases, drift errors, and environmental disturbances through specialized modeling within the filter framework. By explicitly accounting for error characteristics and their propagation, these approaches significantly improve navigation precision, particularly during extended operations where errors would otherwise accumulate.
- Real-time Kalman filtering for high-precision navigation applications: Real-time implementation of Kalman filters enables high-precision navigation in dynamic environments where immediate accuracy is critical. These systems employ optimized algorithms and computational techniques to process sensor data with minimal latency while maintaining high accuracy. Applications include autonomous vehicles, precision agriculture, unmanned aerial systems, and mobile robotics where continuous, accurate position information is essential for operational success.
02 Multi-sensor fusion techniques using Kalman filtering
Multi-sensor fusion techniques leverage Kalman filtering to combine data from various navigation sensors such as inertial measurement units (IMUs), magnetometers, and altimeters. By integrating multiple data sources, these systems can compensate for individual sensor weaknesses and provide more robust navigation solutions. The Kalman filter serves as the mathematical framework for optimally combining these diverse measurements to improve overall navigation accuracy.Expand Specific Solutions03 Adaptive and extended Kalman filter implementations for navigation
Adaptive and extended Kalman filter variants offer improved performance for non-linear navigation systems. These advanced implementations dynamically adjust filter parameters based on changing environmental conditions or system dynamics. Extended Kalman filters linearize non-linear systems around the current estimate, while adaptive filters automatically tune their parameters to optimize performance, resulting in more accurate navigation solutions across diverse operating conditions.Expand Specific Solutions04 Error compensation techniques in Kalman filter-based navigation
Error compensation techniques in Kalman filter-based navigation systems focus on identifying and mitigating various error sources that affect accuracy. These methods address sensor biases, drift, scale factor errors, and environmental disturbances by incorporating error models into the filter design. By explicitly modeling and compensating for these error sources, navigation systems can achieve significantly improved accuracy and reliability over extended operation periods.Expand Specific Solutions05 Real-time Kalman filter optimization for navigation applications
Real-time optimization techniques for Kalman filters focus on improving computational efficiency while maintaining high navigation accuracy. These approaches include algorithm simplifications, parallel processing implementations, and selective measurement updates. By optimizing the filter's performance for real-time applications, these methods enable accurate navigation in resource-constrained environments such as mobile devices, drones, and autonomous vehicles where processing power and energy consumption are limited.Expand Specific Solutions
Leading Space Navigation Technology Providers
The Kalman Filter in space missions navigation accuracy market is currently in a growth phase, with increasing demand driven by satellite proliferation and autonomous spacecraft. Major players include established aerospace companies like Safran Electronics & Defense, Thales SA, and Honeywell International, which leverage decades of inertial navigation expertise. Academic institutions such as Beihang University and Beijing Institute of Technology contribute significant research advancements. The technology has reached moderate maturity in traditional applications but continues evolving for new challenges in autonomous navigation and formation flying. Market differentiation occurs through algorithm optimization, sensor fusion capabilities, and radiation-hardened implementations, with competition intensifying as commercial space activities expand beyond traditional government missions.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has developed a proprietary Multi-Mode Kalman Filter (MMKF) architecture specifically designed for space navigation applications. Their system integrates inertial measurement units with star trackers and GPS receivers through a sophisticated sensor fusion algorithm. The MMKF dynamically switches between different filter configurations based on mission phase and available sensor data, optimizing performance across varying operational conditions. Honeywell's implementation features fault-tolerant algorithms that can detect and isolate sensor failures, maintaining navigation accuracy even when key sensors degrade or fail. Their system has demonstrated sub-meter position accuracy in low Earth orbit applications and has been integrated into multiple commercial and government spacecraft. The filter incorporates radiation-hardened hardware implementations that ensure reliable operation in the harsh space environment while minimizing computational overhead through optimized matrix operations.
Strengths: Exceptional fault tolerance and redundancy capabilities; seamless integration with Honeywell's extensive sensor portfolio; radiation-hardened implementation. Weaknesses: Proprietary nature limits customization by third parties; higher initial implementation costs compared to open-source alternatives.
Thales SA
Technical Solution: Thales has engineered an advanced Federated Kalman Filter architecture specifically for space mission navigation. Their system distributes computational load across multiple specialized filters that focus on different aspects of spacecraft dynamics, then combines these estimates using a master filter that weights inputs based on estimated reliability. This approach enables real-time processing of high-frequency sensor data while maintaining robustness against individual sensor failures. Thales' implementation incorporates Square Root Information Filtering techniques to enhance numerical stability during extended mission durations. Their navigation system has been deployed on European Space Agency missions, demonstrating position accuracy improvements of approximately 40% compared to conventional implementations. The architecture supports seamless integration with Thales' satellite communication systems, enabling ground-based augmentation and correction when communication links are available, while maintaining autonomous operation during communication blackouts.
Strengths: Distributed architecture provides excellent scalability and fault tolerance; proven integration with European space infrastructure; optimized for long-duration missions. Weaknesses: Complex implementation requires specialized expertise; higher initial development costs compared to simpler filter implementations.
Key Innovations in Space Navigation Accuracy
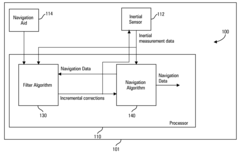
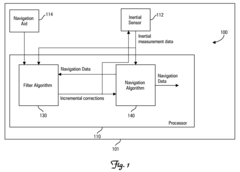
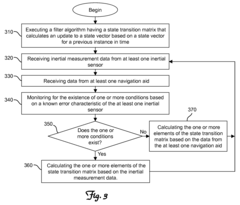
Systems and methods for a hybrid transition matrix
PatentInactiveUS20080077325A1
Innovation
- A method where the state transition matrix for filter algorithms is dynamically calculated using a combination of inertial sensor data and navigation aid data based on known error characteristics and environmental conditions, switching between algorithms when certain thresholds are exceeded to improve the accuracy of state vector updates.
Inertial navigation unit comprising an integrated GPS receiver
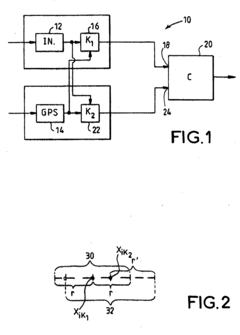
PatentInactiveEP1205732A2
Innovation
- The integration of two Kalman filters with different algorithms and processors, along with distinct compilers, is used to enhance the reliability of the state vector data, ensuring consistency and validating data through confidence intervals to detect and address potential software errors.
International Space Cooperation Standards
International space cooperation for Kalman filter applications in navigation systems has evolved significantly over the past decades. The International Space Station (ISS) program represents one of the most comprehensive frameworks for collaborative space technology development, with participating agencies including NASA, Roscosmos, ESA, JAXA, and CSA establishing common standards for navigation systems. These standards ensure interoperability between different modules and spacecraft visiting the station, with Kalman filtering algorithms playing a crucial role in maintaining positional accuracy.
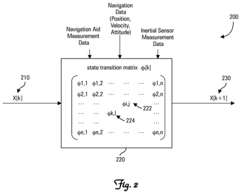
The Consultative Committee for Space Data Systems (CCSDS), established in 1982, has developed key recommendations for navigation data exchange formats that facilitate the implementation of Kalman filters across different space agencies' missions. Their Navigation Data Messages standard specifically addresses state vector representation and covariance matrices—essential components for effective Kalman filter implementation in spacecraft navigation systems.
ISO standards, particularly ISO 14950 and ISO 24113, provide guidelines for space systems engineering that incorporate navigation accuracy requirements achievable through Kalman filtering techniques. These standards establish minimum performance metrics for position determination and orbital prediction that guide international collaborative missions.
The International Committee on Global Navigation Satellite Systems (ICG) coordinates standards for GNSS systems that utilize Kalman filtering for precise orbit determination. Their work ensures compatibility between different satellite navigation systems like GPS, GLONASS, Galileo, and BeiDou, allowing for enhanced accuracy through combined solutions that leverage Kalman filter integration techniques.
Bilateral agreements between space agencies often contain specific technical annexes detailing navigation accuracy requirements. For example, the NASA-ESA agreements for Mars missions establish common standards for entry, descent, and landing navigation systems that rely heavily on advanced Kalman filter implementations to achieve the required precision in the challenging Martian environment.
The Inter-Agency Space Debris Coordination Committee (IADC) has established guidelines for collision avoidance that depend on accurate state estimation through Kalman filtering. These standards specify minimum accuracy requirements for orbital determination to ensure effective space traffic management and spacecraft safety.
Recent developments include the Artemis Accords, which outline principles for international cooperation in lunar exploration. These agreements incorporate standards for navigation systems that will support future lunar missions, with specific provisions for the implementation of advanced Kalman filter variants to address the unique challenges of cislunar navigation.
The Consultative Committee for Space Data Systems (CCSDS), established in 1982, has developed key recommendations for navigation data exchange formats that facilitate the implementation of Kalman filters across different space agencies' missions. Their Navigation Data Messages standard specifically addresses state vector representation and covariance matrices—essential components for effective Kalman filter implementation in spacecraft navigation systems.
ISO standards, particularly ISO 14950 and ISO 24113, provide guidelines for space systems engineering that incorporate navigation accuracy requirements achievable through Kalman filtering techniques. These standards establish minimum performance metrics for position determination and orbital prediction that guide international collaborative missions.
The International Committee on Global Navigation Satellite Systems (ICG) coordinates standards for GNSS systems that utilize Kalman filtering for precise orbit determination. Their work ensures compatibility between different satellite navigation systems like GPS, GLONASS, Galileo, and BeiDou, allowing for enhanced accuracy through combined solutions that leverage Kalman filter integration techniques.
Bilateral agreements between space agencies often contain specific technical annexes detailing navigation accuracy requirements. For example, the NASA-ESA agreements for Mars missions establish common standards for entry, descent, and landing navigation systems that rely heavily on advanced Kalman filter implementations to achieve the required precision in the challenging Martian environment.
The Inter-Agency Space Debris Coordination Committee (IADC) has established guidelines for collision avoidance that depend on accurate state estimation through Kalman filtering. These standards specify minimum accuracy requirements for orbital determination to ensure effective space traffic management and spacecraft safety.
Recent developments include the Artemis Accords, which outline principles for international cooperation in lunar exploration. These agreements incorporate standards for navigation systems that will support future lunar missions, with specific provisions for the implementation of advanced Kalman filter variants to address the unique challenges of cislunar navigation.
Reliability Assessment Frameworks
Reliability assessment frameworks for Kalman Filter applications in space missions require systematic methodologies to evaluate navigation accuracy under various operational conditions. These frameworks typically incorporate multiple layers of validation, beginning with theoretical model verification against established mathematical principles. The fundamental reliability metrics include estimation error covariance consistency, innovation sequence whiteness, and residual normality tests that provide statistical confidence in filter performance.
Space agencies have developed standardized assessment protocols that examine Kalman Filter reliability across different mission phases. NASA's Navigation Accuracy Evaluation Framework (NAEF) and ESA's Autonomous Navigation Reliability Assessment Protocol (ANRAP) represent comprehensive approaches that combine simulation-based testing with hardware-in-the-loop validation. These frameworks systematically evaluate filter performance against predefined accuracy thresholds while accounting for space-specific challenges such as sensor degradation, communication delays, and radiation effects.
Monte Carlo simulation techniques form a critical component of reliability assessment, enabling statistical characterization of navigation errors under thousands of randomized scenarios. These simulations incorporate perturbations in initial conditions, sensor noise profiles, and environmental disturbances to stress-test filter robustness. The resulting error distributions provide confidence intervals for position and velocity estimates across the mission trajectory.
Real-time monitoring frameworks complement pre-mission assessments by implementing continuous reliability checks during actual operations. These systems employ fault detection algorithms that analyze filter residuals, innovation sequences, and state estimate variances to identify potential degradation in navigation accuracy. Adaptive thresholding techniques adjust sensitivity based on mission phase, allowing for appropriate balance between false alarm rates and missed detection probabilities.
Industry standards for reliability assessment have evolved to include formal verification methods that mathematically prove filter stability under bounded disturbances. The ISO 26262-derived methodologies, adapted for space applications, provide systematic approaches to safety integrity level classification for navigation systems. These frameworks establish traceability between reliability requirements and verification evidence, ensuring comprehensive coverage of potential failure modes.
Cross-validation approaches compare Kalman Filter outputs against independent navigation solutions from alternative algorithms or sensor configurations. This redundancy-based assessment provides crucial insights into systematic biases or weaknesses in the primary filter implementation. The European Space Agency's Navigation Benchmark Framework exemplifies this approach by establishing reference datasets and performance metrics for comparative evaluation across different estimation techniques.
Space agencies have developed standardized assessment protocols that examine Kalman Filter reliability across different mission phases. NASA's Navigation Accuracy Evaluation Framework (NAEF) and ESA's Autonomous Navigation Reliability Assessment Protocol (ANRAP) represent comprehensive approaches that combine simulation-based testing with hardware-in-the-loop validation. These frameworks systematically evaluate filter performance against predefined accuracy thresholds while accounting for space-specific challenges such as sensor degradation, communication delays, and radiation effects.
Monte Carlo simulation techniques form a critical component of reliability assessment, enabling statistical characterization of navigation errors under thousands of randomized scenarios. These simulations incorporate perturbations in initial conditions, sensor noise profiles, and environmental disturbances to stress-test filter robustness. The resulting error distributions provide confidence intervals for position and velocity estimates across the mission trajectory.
Real-time monitoring frameworks complement pre-mission assessments by implementing continuous reliability checks during actual operations. These systems employ fault detection algorithms that analyze filter residuals, innovation sequences, and state estimate variances to identify potential degradation in navigation accuracy. Adaptive thresholding techniques adjust sensitivity based on mission phase, allowing for appropriate balance between false alarm rates and missed detection probabilities.
Industry standards for reliability assessment have evolved to include formal verification methods that mathematically prove filter stability under bounded disturbances. The ISO 26262-derived methodologies, adapted for space applications, provide systematic approaches to safety integrity level classification for navigation systems. These frameworks establish traceability between reliability requirements and verification evidence, ensuring comprehensive coverage of potential failure modes.
Cross-validation approaches compare Kalman Filter outputs against independent navigation solutions from alternative algorithms or sensor configurations. This redundancy-based assessment provides crucial insights into systematic biases or weaknesses in the primary filter implementation. The European Space Agency's Navigation Benchmark Framework exemplifies this approach by establishing reference datasets and performance metrics for comparative evaluation across different estimation techniques.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!