

How to Compare Neuromorphic Architectures for Robotics Perception Tasks
AUG 20, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Robotics Background and Objectives
Neuromorphic robotics represents a paradigm shift in the field of robotics, drawing inspiration from the structure and function of biological neural systems. This approach aims to create robotic systems that can perceive, process, and respond to their environment in ways that mimic the efficiency and adaptability of biological brains. The development of neuromorphic architectures for robotics perception tasks has gained significant momentum in recent years, driven by advancements in neuroscience, artificial intelligence, and hardware design.
The evolution of neuromorphic robotics can be traced back to the early work on artificial neural networks in the 1940s and 1950s. However, it was not until the late 1980s and early 1990s that researchers began to seriously explore the potential of neuromorphic engineering for robotics applications. The field has since progressed rapidly, with major breakthroughs in areas such as spiking neural networks, event-based vision sensors, and neuromorphic hardware platforms.
The primary objective of neuromorphic robotics is to overcome the limitations of traditional von Neumann computing architectures in handling complex, real-time perception tasks. By emulating the parallel processing and energy efficiency of biological neural systems, neuromorphic architectures aim to enable robots to perceive and interact with their environment more effectively and efficiently.
Key technological goals in this field include developing low-power, high-performance neuromorphic hardware, creating efficient algorithms for processing sensory information in a brain-like manner, and integrating these components into functional robotic systems. Additionally, there is a strong focus on improving the scalability and adaptability of neuromorphic architectures to handle a wide range of perception tasks across different robotic platforms.
The comparison of neuromorphic architectures for robotics perception tasks is crucial for advancing the field and identifying the most promising approaches. This involves evaluating various aspects such as processing speed, energy efficiency, adaptability to different environments, and the ability to handle complex, multi-modal sensory inputs. Furthermore, comparisons must consider the practical implementation challenges and the potential for integration with existing robotic systems.
As the field continues to evolve, researchers are exploring novel neuromorphic architectures that can better capture the complexities of biological neural systems. This includes investigating hierarchical network structures, incorporating mechanisms for learning and plasticity, and developing more sophisticated event-based sensors. The ultimate goal is to create robotic systems that can perceive and interact with their environment with the same level of sophistication and efficiency as biological organisms.
The evolution of neuromorphic robotics can be traced back to the early work on artificial neural networks in the 1940s and 1950s. However, it was not until the late 1980s and early 1990s that researchers began to seriously explore the potential of neuromorphic engineering for robotics applications. The field has since progressed rapidly, with major breakthroughs in areas such as spiking neural networks, event-based vision sensors, and neuromorphic hardware platforms.
The primary objective of neuromorphic robotics is to overcome the limitations of traditional von Neumann computing architectures in handling complex, real-time perception tasks. By emulating the parallel processing and energy efficiency of biological neural systems, neuromorphic architectures aim to enable robots to perceive and interact with their environment more effectively and efficiently.
Key technological goals in this field include developing low-power, high-performance neuromorphic hardware, creating efficient algorithms for processing sensory information in a brain-like manner, and integrating these components into functional robotic systems. Additionally, there is a strong focus on improving the scalability and adaptability of neuromorphic architectures to handle a wide range of perception tasks across different robotic platforms.
The comparison of neuromorphic architectures for robotics perception tasks is crucial for advancing the field and identifying the most promising approaches. This involves evaluating various aspects such as processing speed, energy efficiency, adaptability to different environments, and the ability to handle complex, multi-modal sensory inputs. Furthermore, comparisons must consider the practical implementation challenges and the potential for integration with existing robotic systems.
As the field continues to evolve, researchers are exploring novel neuromorphic architectures that can better capture the complexities of biological neural systems. This includes investigating hierarchical network structures, incorporating mechanisms for learning and plasticity, and developing more sophisticated event-based sensors. The ultimate goal is to create robotic systems that can perceive and interact with their environment with the same level of sophistication and efficiency as biological organisms.
Market Analysis for Neuromorphic Robotics
The market for neuromorphic robotics is experiencing significant growth and transformation, driven by advancements in artificial intelligence, machine learning, and neuromorphic computing. This emerging field combines the principles of neuroscience with robotics to create more efficient and adaptive robotic systems capable of performing complex perception tasks.
The global neuromorphic computing market, which includes applications in robotics, is projected to expand rapidly in the coming years. This growth is fueled by increasing demand for AI-powered robots across various industries, including manufacturing, healthcare, and logistics. The integration of neuromorphic architectures in robotics perception tasks offers several advantages, such as improved energy efficiency, faster processing speeds, and enhanced adaptability to dynamic environments.
Key market drivers for neuromorphic robotics include the rising need for autonomous systems in industrial applications, the growing adoption of collaborative robots (cobots) in manufacturing, and the increasing focus on human-robot interaction in service sectors. Additionally, the development of edge computing and the Internet of Things (IoT) is creating new opportunities for neuromorphic robotics in distributed sensing and decision-making applications.
The automotive industry represents a significant market segment for neuromorphic robotics, particularly in the development of advanced driver assistance systems (ADAS) and autonomous vehicles. These applications require sophisticated perception capabilities to interpret complex environments in real-time, making neuromorphic architectures an attractive solution.
Healthcare is another promising sector for neuromorphic robotics, with applications ranging from surgical assistance to rehabilitation and elderly care. The ability of neuromorphic systems to process sensory information efficiently and adapt to individual patient needs makes them well-suited for these sensitive applications.
Despite the promising outlook, the market for neuromorphic robotics faces several challenges. These include the high initial costs of development and implementation, the need for specialized expertise in both neuroscience and robotics, and concerns regarding the reliability and safety of neuromorphic systems in critical applications.
Geographically, North America and Europe are currently leading the market in neuromorphic robotics research and development, with significant investments from both private companies and government institutions. However, Asia-Pacific is expected to witness the fastest growth in the coming years, driven by rapid industrialization and increasing adoption of advanced technologies in countries like China, Japan, and South Korea.
As the technology matures and becomes more accessible, we can expect to see a wider adoption of neuromorphic architectures in robotics perception tasks across various industries. This trend is likely to reshape the competitive landscape of the robotics market, with companies that successfully integrate neuromorphic technologies gaining a significant advantage in terms of product performance and energy efficiency.
The global neuromorphic computing market, which includes applications in robotics, is projected to expand rapidly in the coming years. This growth is fueled by increasing demand for AI-powered robots across various industries, including manufacturing, healthcare, and logistics. The integration of neuromorphic architectures in robotics perception tasks offers several advantages, such as improved energy efficiency, faster processing speeds, and enhanced adaptability to dynamic environments.
Key market drivers for neuromorphic robotics include the rising need for autonomous systems in industrial applications, the growing adoption of collaborative robots (cobots) in manufacturing, and the increasing focus on human-robot interaction in service sectors. Additionally, the development of edge computing and the Internet of Things (IoT) is creating new opportunities for neuromorphic robotics in distributed sensing and decision-making applications.
The automotive industry represents a significant market segment for neuromorphic robotics, particularly in the development of advanced driver assistance systems (ADAS) and autonomous vehicles. These applications require sophisticated perception capabilities to interpret complex environments in real-time, making neuromorphic architectures an attractive solution.
Healthcare is another promising sector for neuromorphic robotics, with applications ranging from surgical assistance to rehabilitation and elderly care. The ability of neuromorphic systems to process sensory information efficiently and adapt to individual patient needs makes them well-suited for these sensitive applications.
Despite the promising outlook, the market for neuromorphic robotics faces several challenges. These include the high initial costs of development and implementation, the need for specialized expertise in both neuroscience and robotics, and concerns regarding the reliability and safety of neuromorphic systems in critical applications.
Geographically, North America and Europe are currently leading the market in neuromorphic robotics research and development, with significant investments from both private companies and government institutions. However, Asia-Pacific is expected to witness the fastest growth in the coming years, driven by rapid industrialization and increasing adoption of advanced technologies in countries like China, Japan, and South Korea.
As the technology matures and becomes more accessible, we can expect to see a wider adoption of neuromorphic architectures in robotics perception tasks across various industries. This trend is likely to reshape the competitive landscape of the robotics market, with companies that successfully integrate neuromorphic technologies gaining a significant advantage in terms of product performance and energy efficiency.
Current Challenges in Neuromorphic Perception
Neuromorphic perception in robotics faces several significant challenges that hinder its widespread adoption and effectiveness. One of the primary obstacles is the inherent complexity of mimicking biological neural systems in artificial hardware. The human brain's intricate network of neurons and synapses, with its ability to process vast amounts of sensory information in real-time, presents a formidable target for emulation in robotic systems.
The development of efficient and scalable neuromorphic hardware architectures remains a critical challenge. Current implementations often struggle to balance power consumption, processing speed, and computational capacity. This balance is crucial for robotic applications that require real-time processing of sensory data while operating within constrained energy budgets.
Another significant hurdle is the integration of neuromorphic systems with traditional robotic control architectures. The fundamental differences in information processing between conventional computing paradigms and neuromorphic systems create compatibility issues that need to be addressed for seamless integration into existing robotic platforms.
The lack of standardized benchmarks and evaluation metrics specifically tailored for neuromorphic perception in robotics poses a challenge in comparing different architectures and assessing their performance. This absence of common evaluation frameworks makes it difficult to objectively measure progress and identify the most promising approaches.
Data representation and encoding present additional challenges. Translating real-world sensory inputs into spike-based representations compatible with neuromorphic systems requires careful consideration of information preservation and efficient encoding schemes. This translation process can introduce latency and potentially loss of critical information if not properly implemented.
The development of suitable learning algorithms for neuromorphic systems in robotic perception tasks is another area of ongoing research. Traditional machine learning approaches often do not directly translate to spiking neural networks, necessitating the development of new training methodologies that can effectively leverage the unique characteristics of neuromorphic hardware.
Robustness and adaptability of neuromorphic perception systems in dynamic and unpredictable environments remain significant challenges. Robotic systems must be capable of handling variations in lighting conditions, occlusions, and novel objects while maintaining reliable perception capabilities.
Lastly, the interdisciplinary nature of neuromorphic robotics perception requires collaboration between neuroscientists, computer scientists, roboticists, and hardware engineers. Bridging the knowledge gap between these disciplines and fostering effective communication and collaboration presents an ongoing challenge in advancing the field.
The development of efficient and scalable neuromorphic hardware architectures remains a critical challenge. Current implementations often struggle to balance power consumption, processing speed, and computational capacity. This balance is crucial for robotic applications that require real-time processing of sensory data while operating within constrained energy budgets.
Another significant hurdle is the integration of neuromorphic systems with traditional robotic control architectures. The fundamental differences in information processing between conventional computing paradigms and neuromorphic systems create compatibility issues that need to be addressed for seamless integration into existing robotic platforms.
The lack of standardized benchmarks and evaluation metrics specifically tailored for neuromorphic perception in robotics poses a challenge in comparing different architectures and assessing their performance. This absence of common evaluation frameworks makes it difficult to objectively measure progress and identify the most promising approaches.
Data representation and encoding present additional challenges. Translating real-world sensory inputs into spike-based representations compatible with neuromorphic systems requires careful consideration of information preservation and efficient encoding schemes. This translation process can introduce latency and potentially loss of critical information if not properly implemented.
The development of suitable learning algorithms for neuromorphic systems in robotic perception tasks is another area of ongoing research. Traditional machine learning approaches often do not directly translate to spiking neural networks, necessitating the development of new training methodologies that can effectively leverage the unique characteristics of neuromorphic hardware.
Robustness and adaptability of neuromorphic perception systems in dynamic and unpredictable environments remain significant challenges. Robotic systems must be capable of handling variations in lighting conditions, occlusions, and novel objects while maintaining reliable perception capabilities.
Lastly, the interdisciplinary nature of neuromorphic robotics perception requires collaboration between neuroscientists, computer scientists, roboticists, and hardware engineers. Bridging the knowledge gap between these disciplines and fostering effective communication and collaboration presents an ongoing challenge in advancing the field.
Existing Comparison Methodologies
01 Neuromorphic computing systems
Neuromorphic architectures aim to mimic the structure and function of biological neural networks. These systems incorporate artificial neurons and synapses to process information in a manner similar to the human brain, enabling efficient parallel processing and adaptive learning capabilities.- Neuromorphic computing systems: Neuromorphic architectures are designed to mimic the structure and function of biological neural networks. These systems incorporate artificial neurons and synapses to process information in a manner similar to the human brain, enabling efficient parallel processing and adaptive learning capabilities.
- Spiking neural networks: Spiking neural networks are a key component of neuromorphic architectures, utilizing discrete spikes for information transmission and processing. These networks aim to replicate the energy efficiency and temporal dynamics of biological neural systems, making them suitable for real-time processing and pattern recognition tasks.
- Memristive devices in neuromorphic computing: Memristive devices are increasingly used in neuromorphic architectures to emulate synaptic behavior. These devices can store and process information simultaneously, enabling efficient implementation of neural network algorithms and reducing power consumption in neuromorphic systems.
- Neuromorphic hardware acceleration: Specialized hardware accelerators are developed to optimize the performance of neuromorphic architectures. These accelerators are designed to efficiently execute neural network algorithms, enabling faster processing and reduced energy consumption compared to traditional computing systems.
- Applications of neuromorphic architectures: Neuromorphic architectures find applications in various fields, including computer vision, natural language processing, and robotics. These systems are particularly suited for tasks requiring real-time processing, adaptability, and energy efficiency, such as autonomous vehicles, smart sensors, and edge computing devices.
02 Spiking neural networks
Spiking neural networks are a key component of neuromorphic architectures, utilizing discrete spikes for information transmission and processing. These networks more closely resemble biological neural systems, offering potential advantages in energy efficiency and temporal information processing.Expand Specific Solutions03 Memristive devices in neuromorphic computing
Memristive devices are increasingly used in neuromorphic architectures to emulate synaptic behavior. These devices can store and process information simultaneously, enabling more efficient and compact neuromorphic systems with potential applications in artificial intelligence and machine learning.Expand Specific Solutions04 Neuromorphic hardware implementations
Hardware implementations of neuromorphic architectures focus on creating specialized chips and circuits that can efficiently execute neural network algorithms. These implementations aim to overcome the limitations of traditional von Neumann architectures in terms of power consumption and processing speed for AI applications.Expand Specific Solutions05 Learning algorithms for neuromorphic systems
Developing efficient learning algorithms is crucial for neuromorphic architectures. These algorithms enable the systems to adapt and improve their performance over time, often drawing inspiration from biological learning processes such as spike-timing-dependent plasticity (STDP) and homeostatic plasticity.Expand Specific Solutions
Key Players in Neuromorphic Robotics
The competition landscape for neuromorphic architectures in robotics perception tasks is evolving rapidly, with the market still in its early stages but showing significant growth potential. Major players like IBM, Intel, and NVIDIA are investing heavily in research and development, leveraging their expertise in AI and chip design. Universities such as Zhejiang University and Fudan University are also contributing to advancements in this field. The technology is not yet fully mature, with various approaches being explored by different companies and research institutions. As the market develops, we can expect increased collaboration between industry and academia to drive innovation and commercialization of neuromorphic solutions for robotics applications.
International Business Machines Corp.
Technical Solution: IBM's TrueNorth neuromorphic chip architecture is designed to emulate the brain's structure and function, making it suitable for robotics perception tasks. TrueNorth contains 4,096 neurosynaptic cores, each with 256 neurons, totaling over 1 million neurons and 256 million synapses[7]. The chip consumes only 70 milliwatts of power while performing 46 billion synaptic operations per second[8]. For robotics perception, TrueNorth excels in pattern recognition and sensory processing tasks. IBM has demonstrated its capabilities in real-time object detection, classification, and tracking[9]. The company has also developed a software ecosystem, including the Corelet Programming Language and a simulator, to support the development of neuromorphic applications for robotics[10].
Strengths: Extremely low power consumption, high scalability, and potential for complex pattern recognition. Weaknesses: Limited adoption in the robotics industry and challenges in programming compared to traditional architectures.
Samsung Electronics Co., Ltd.
Technical Solution: Samsung's approach to neuromorphic computing for robotics perception involves both hardware and software innovations. Their neuromorphic chip, developed in collaboration with IBM, is based on the brain's neural structure and aims to process complex sensory data efficiently. The chip utilizes resistive random-access memory (RRAM) technology, allowing for in-memory computing that significantly reduces power consumption[11]. For robotics perception tasks, Samsung's neuromorphic architecture focuses on visual and auditory processing, enabling real-time object recognition and speech understanding. The company has also invested in developing neuromorphic algorithms optimized for their hardware, particularly in the areas of computer vision and natural language processing[12]. Samsung's neuromorphic solutions aim to enhance the perception capabilities of robots while minimizing energy consumption, making them suitable for mobile and autonomous robotic systems.
Strengths: Integration of neuromorphic technology with existing semiconductor expertise, potential for low-power, high-performance sensory processing. Weaknesses: Relatively new in the neuromorphic field compared to some competitors, limited public information on specific robotics applications.
Core Neuromorphic Perception Technologies
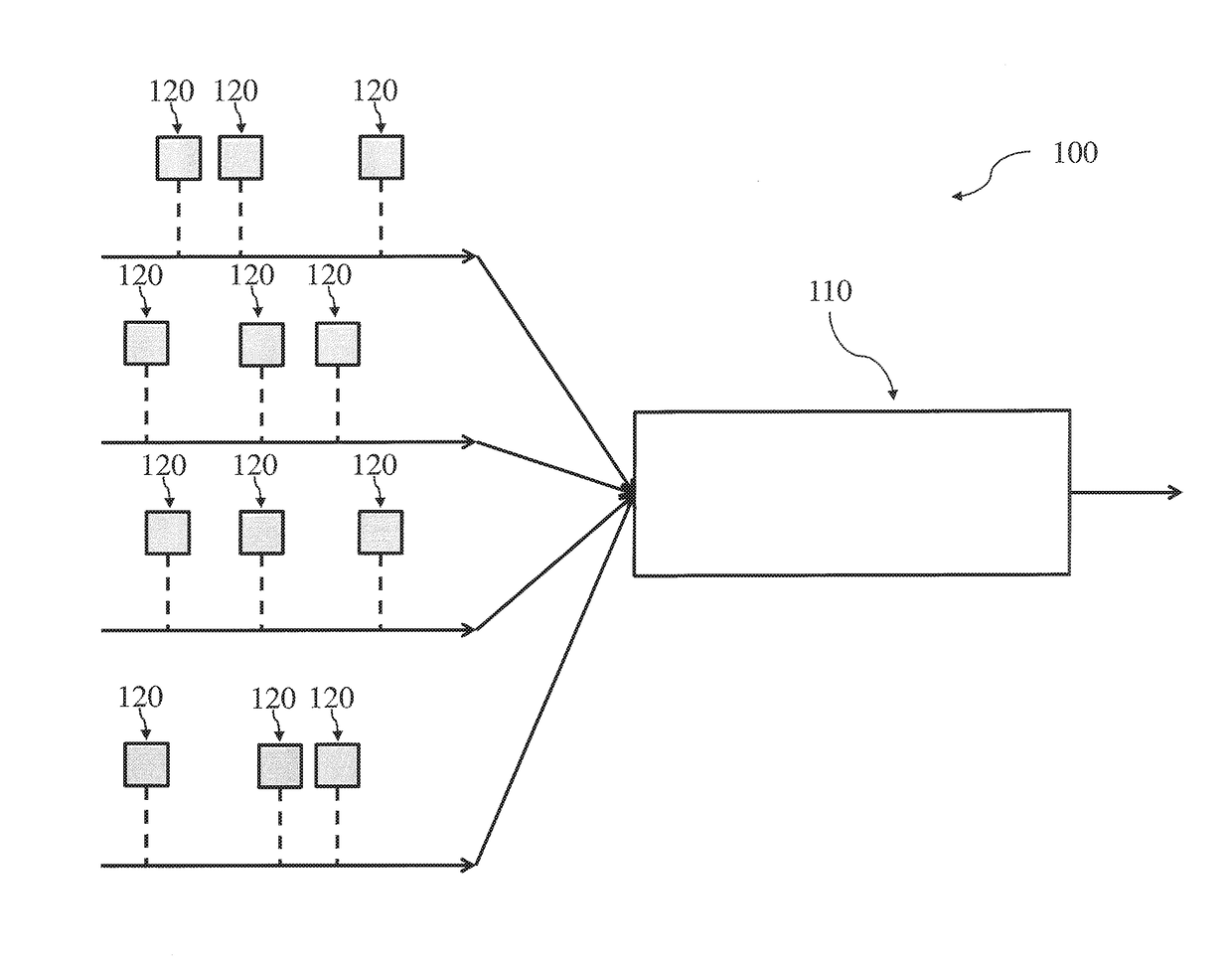
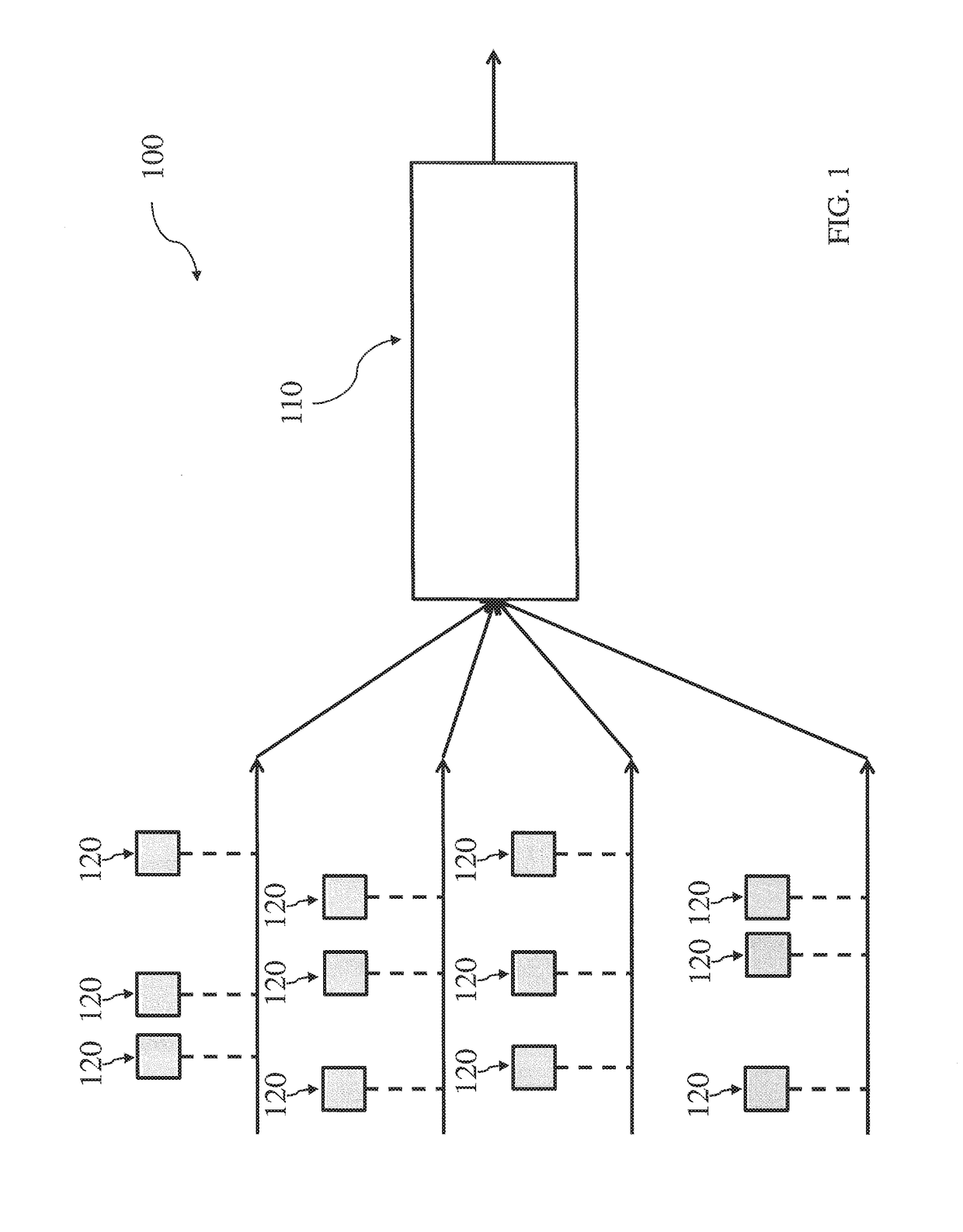
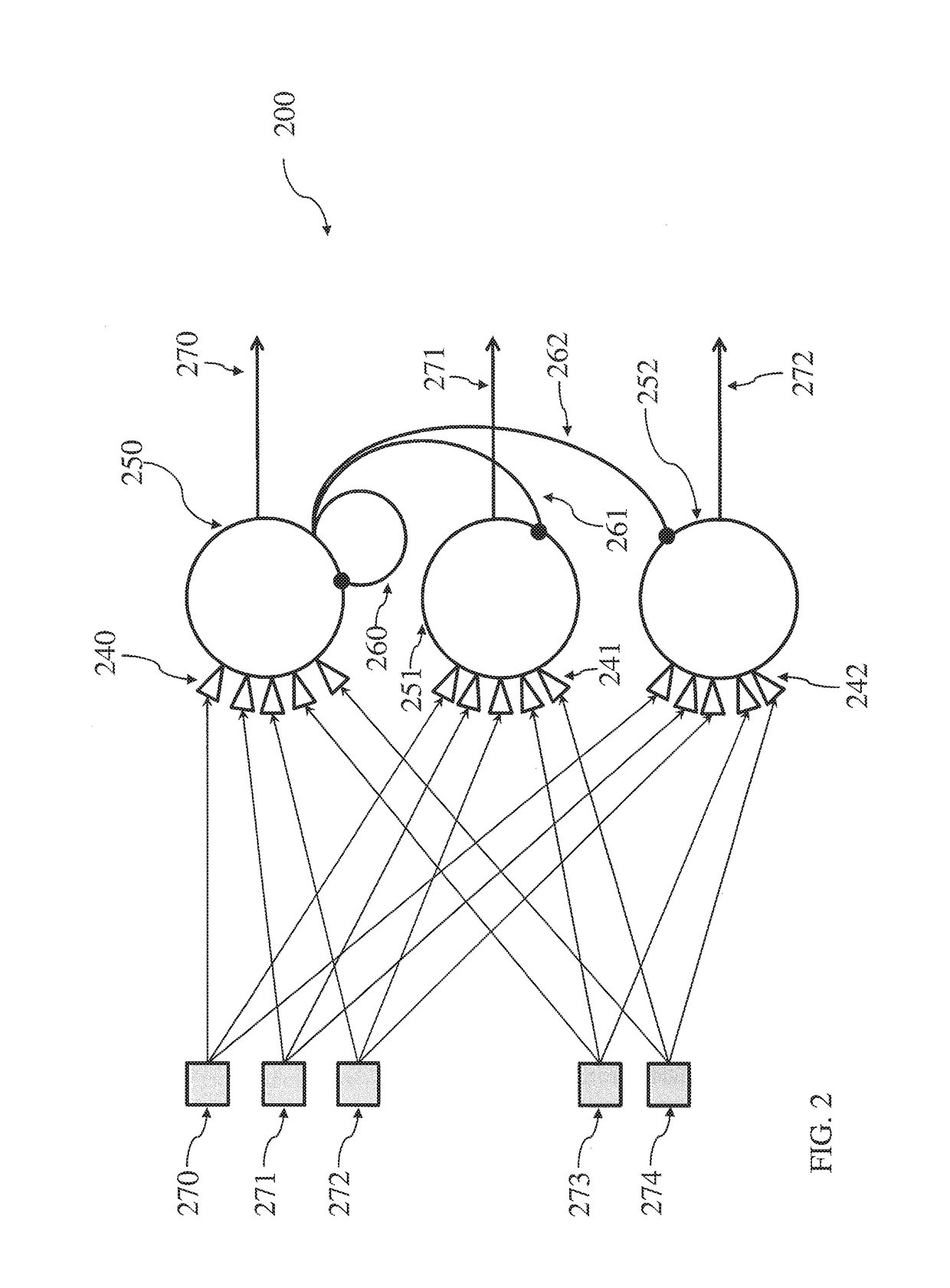
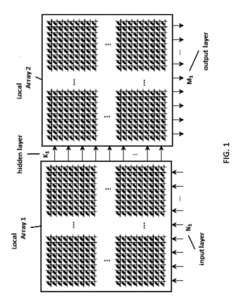
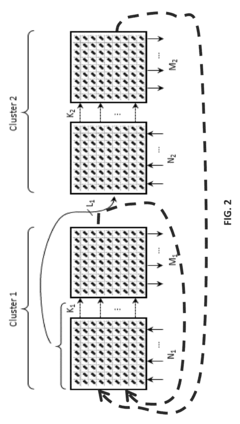
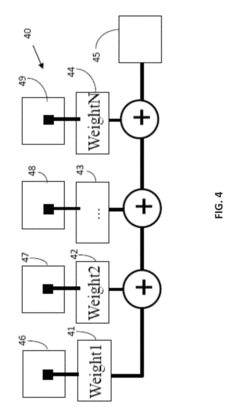
Neuromorphic architecture with multiple coupled neurons using internal state neuron information
PatentActiveUS20170372194A1
Innovation
- A neuromorphic architecture featuring interconnected neurons with internal state information links, allowing for the transmission of internal state information across layers to modify the operation of other neurons, enhancing the system's performance and capability in data processing, pattern recognition, and correlation detection.
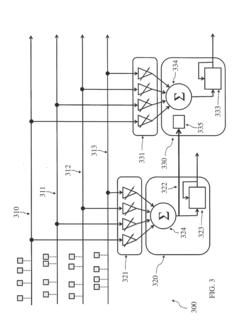
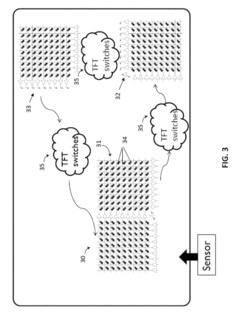
Control plane organization for flexible digital data plane
PatentActiveUS20190034111A1
Innovation
- A control plane design utilizing TFT devices with delay lines and low-leakage memory cells, implementing geometrical coding and wave pipelining to reduce area and energy consumption while maintaining dynamic connectivity, allowing for efficient parameter updating and synchronization without clocking.
Benchmarking Frameworks for Neuromorphic Systems
Benchmarking frameworks for neuromorphic systems play a crucial role in comparing and evaluating different neuromorphic architectures for robotics perception tasks. These frameworks provide standardized methodologies and metrics to assess the performance, efficiency, and capabilities of various neuromorphic implementations.
One of the key aspects of benchmarking frameworks is the establishment of common datasets and task definitions. These datasets typically include a diverse range of robotics perception scenarios, such as object recognition, scene understanding, and motion detection. By using standardized datasets, researchers can ensure fair comparisons between different neuromorphic architectures and traditional computing approaches.
Performance metrics are another essential component of benchmarking frameworks. These metrics often include accuracy, latency, energy efficiency, and scalability. For robotics perception tasks, real-time processing capabilities and power consumption are particularly important considerations. Benchmarking frameworks may also incorporate metrics specific to neuromorphic systems, such as spike rates and synaptic operations per second.
To facilitate comprehensive evaluations, benchmarking frameworks often provide tools for simulating neuromorphic hardware and software environments. These simulation tools allow researchers to test their algorithms and architectures under controlled conditions, enabling rapid prototyping and optimization before deployment on physical neuromorphic hardware.
Standardized reporting formats and visualization tools are typically included in benchmarking frameworks to ensure clear and consistent presentation of results. These tools help researchers communicate their findings effectively and enable easy comparison of different neuromorphic architectures across various performance dimensions.
Many benchmarking frameworks also incorporate reference implementations of state-of-the-art algorithms for robotics perception tasks. These reference implementations serve as baselines for comparison and help researchers understand the relative performance of their novel approaches.
Collaborative efforts within the neuromorphic computing community have led to the development of open-source benchmarking frameworks. These frameworks promote transparency, reproducibility, and knowledge sharing among researchers and practitioners in the field.
As neuromorphic computing continues to evolve, benchmarking frameworks are regularly updated to reflect advancements in hardware capabilities and algorithm design. This ongoing refinement ensures that the frameworks remain relevant and valuable for comparing neuromorphic architectures in the context of robotics perception tasks.
One of the key aspects of benchmarking frameworks is the establishment of common datasets and task definitions. These datasets typically include a diverse range of robotics perception scenarios, such as object recognition, scene understanding, and motion detection. By using standardized datasets, researchers can ensure fair comparisons between different neuromorphic architectures and traditional computing approaches.
Performance metrics are another essential component of benchmarking frameworks. These metrics often include accuracy, latency, energy efficiency, and scalability. For robotics perception tasks, real-time processing capabilities and power consumption are particularly important considerations. Benchmarking frameworks may also incorporate metrics specific to neuromorphic systems, such as spike rates and synaptic operations per second.
To facilitate comprehensive evaluations, benchmarking frameworks often provide tools for simulating neuromorphic hardware and software environments. These simulation tools allow researchers to test their algorithms and architectures under controlled conditions, enabling rapid prototyping and optimization before deployment on physical neuromorphic hardware.
Standardized reporting formats and visualization tools are typically included in benchmarking frameworks to ensure clear and consistent presentation of results. These tools help researchers communicate their findings effectively and enable easy comparison of different neuromorphic architectures across various performance dimensions.
Many benchmarking frameworks also incorporate reference implementations of state-of-the-art algorithms for robotics perception tasks. These reference implementations serve as baselines for comparison and help researchers understand the relative performance of their novel approaches.
Collaborative efforts within the neuromorphic computing community have led to the development of open-source benchmarking frameworks. These frameworks promote transparency, reproducibility, and knowledge sharing among researchers and practitioners in the field.
As neuromorphic computing continues to evolve, benchmarking frameworks are regularly updated to reflect advancements in hardware capabilities and algorithm design. This ongoing refinement ensures that the frameworks remain relevant and valuable for comparing neuromorphic architectures in the context of robotics perception tasks.
Energy Efficiency Considerations
Energy efficiency is a critical consideration when comparing neuromorphic architectures for robotics perception tasks. These architectures, inspired by biological neural networks, offer potential advantages in terms of power consumption and computational efficiency. However, the energy efficiency of different neuromorphic designs can vary significantly, impacting their suitability for robotics applications.
One key factor in energy efficiency is the underlying hardware implementation. Analog neuromorphic circuits can achieve high energy efficiency by directly emulating neural dynamics, but they may face challenges in scalability and precision. Digital implementations, on the other hand, offer greater flexibility and scalability but may consume more power. Hybrid approaches combining analog and digital elements aim to balance these trade-offs.
The choice of neural network model and learning algorithm also affects energy efficiency. Spiking Neural Networks (SNNs) are often favored in neuromorphic systems due to their event-driven nature, which can lead to reduced power consumption compared to traditional artificial neural networks. However, the energy savings of SNNs depend on factors such as spike encoding schemes and neuron models.
Memory access and data movement contribute significantly to energy consumption in neuromorphic systems. Architectures that minimize off-chip memory access and optimize on-chip memory utilization can achieve substantial energy savings. This is particularly important for robotics perception tasks, which often involve processing large amounts of sensory data.
The energy efficiency of neuromorphic architectures can also be influenced by their ability to adapt to changing task requirements. Systems that can dynamically adjust their computational resources and power consumption based on the complexity of the current perception task may offer advantages in real-world robotics applications.
When comparing neuromorphic architectures, it is essential to consider energy efficiency metrics that are relevant to robotics perception tasks. These may include energy per inference, energy-delay product, and power density. Additionally, the energy required for learning and adaptation should be taken into account, as many robotics applications require continuous learning in dynamic environments.
The integration of neuromorphic architectures with other components of a robotics system, such as sensors and actuators, can also impact overall energy efficiency. Architectures that facilitate efficient sensor-processor integration and low-latency processing may contribute to reduced power consumption at the system level.
One key factor in energy efficiency is the underlying hardware implementation. Analog neuromorphic circuits can achieve high energy efficiency by directly emulating neural dynamics, but they may face challenges in scalability and precision. Digital implementations, on the other hand, offer greater flexibility and scalability but may consume more power. Hybrid approaches combining analog and digital elements aim to balance these trade-offs.
The choice of neural network model and learning algorithm also affects energy efficiency. Spiking Neural Networks (SNNs) are often favored in neuromorphic systems due to their event-driven nature, which can lead to reduced power consumption compared to traditional artificial neural networks. However, the energy savings of SNNs depend on factors such as spike encoding schemes and neuron models.
Memory access and data movement contribute significantly to energy consumption in neuromorphic systems. Architectures that minimize off-chip memory access and optimize on-chip memory utilization can achieve substantial energy savings. This is particularly important for robotics perception tasks, which often involve processing large amounts of sensory data.
The energy efficiency of neuromorphic architectures can also be influenced by their ability to adapt to changing task requirements. Systems that can dynamically adjust their computational resources and power consumption based on the complexity of the current perception task may offer advantages in real-world robotics applications.
When comparing neuromorphic architectures, it is essential to consider energy efficiency metrics that are relevant to robotics perception tasks. These may include energy per inference, energy-delay product, and power density. Additionally, the energy required for learning and adaptation should be taken into account, as many robotics applications require continuous learning in dynamic environments.
The integration of neuromorphic architectures with other components of a robotics system, such as sensors and actuators, can also impact overall energy efficiency. Architectures that facilitate efficient sensor-processor integration and low-latency processing may contribute to reduced power consumption at the system level.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!