How to Deploy Neuromorphic Accelerators in Autonomous Systems: Perception to Control
AUG 20, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic Accelerators in Autonomous Systems: Overview and Objectives
Neuromorphic accelerators represent a groundbreaking approach to computing that mimics the structure and function of biological neural networks. In the context of autonomous systems, these accelerators offer immense potential to revolutionize perception and control mechanisms. The primary objective of deploying neuromorphic accelerators in autonomous systems is to enhance their ability to process complex sensory inputs, make rapid decisions, and execute precise control actions in real-time environments.
The evolution of neuromorphic computing has been driven by the need for more efficient and adaptable computational systems capable of handling the increasing complexity of autonomous applications. Traditional von Neumann architectures have struggled to meet the demands of real-time processing and energy efficiency required in autonomous systems. Neuromorphic accelerators address these limitations by leveraging parallel processing, event-driven computation, and low-power operation.
In autonomous systems, neuromorphic accelerators aim to bridge the gap between perception and control, enabling seamless integration of sensory inputs with decision-making processes. This integration is crucial for applications such as autonomous vehicles, drones, and robotic systems, where rapid and accurate responses to dynamic environments are essential. By emulating the brain's ability to process information efficiently, these accelerators can potentially reduce latency, improve energy efficiency, and enhance the overall performance of autonomous systems.
The deployment of neuromorphic accelerators in autonomous systems faces several technical challenges. These include developing robust algorithms that can effectively utilize the unique architecture of neuromorphic hardware, ensuring compatibility with existing sensor technologies and control systems, and addressing issues related to scalability and reliability in real-world applications. Additionally, there is a need to develop standardized benchmarks and evaluation metrics to assess the performance of neuromorphic systems in autonomous applications.
Looking ahead, the future of neuromorphic accelerators in autonomous systems is promising. Research efforts are focused on improving the scalability of neuromorphic architectures, enhancing their learning capabilities, and developing more sophisticated algorithms that can fully exploit the potential of these bio-inspired computing systems. As the technology matures, we can expect to see neuromorphic accelerators playing an increasingly critical role in enabling more intelligent, efficient, and adaptive autonomous systems across various domains.
The evolution of neuromorphic computing has been driven by the need for more efficient and adaptable computational systems capable of handling the increasing complexity of autonomous applications. Traditional von Neumann architectures have struggled to meet the demands of real-time processing and energy efficiency required in autonomous systems. Neuromorphic accelerators address these limitations by leveraging parallel processing, event-driven computation, and low-power operation.
In autonomous systems, neuromorphic accelerators aim to bridge the gap between perception and control, enabling seamless integration of sensory inputs with decision-making processes. This integration is crucial for applications such as autonomous vehicles, drones, and robotic systems, where rapid and accurate responses to dynamic environments are essential. By emulating the brain's ability to process information efficiently, these accelerators can potentially reduce latency, improve energy efficiency, and enhance the overall performance of autonomous systems.
The deployment of neuromorphic accelerators in autonomous systems faces several technical challenges. These include developing robust algorithms that can effectively utilize the unique architecture of neuromorphic hardware, ensuring compatibility with existing sensor technologies and control systems, and addressing issues related to scalability and reliability in real-world applications. Additionally, there is a need to develop standardized benchmarks and evaluation metrics to assess the performance of neuromorphic systems in autonomous applications.
Looking ahead, the future of neuromorphic accelerators in autonomous systems is promising. Research efforts are focused on improving the scalability of neuromorphic architectures, enhancing their learning capabilities, and developing more sophisticated algorithms that can fully exploit the potential of these bio-inspired computing systems. As the technology matures, we can expect to see neuromorphic accelerators playing an increasingly critical role in enabling more intelligent, efficient, and adaptive autonomous systems across various domains.
Market Analysis for Neuromorphic Computing in Autonomous Vehicles
The market for neuromorphic computing in autonomous vehicles is experiencing rapid growth and attracting significant attention from both automotive manufacturers and technology companies. This emerging technology promises to revolutionize the capabilities of autonomous systems by mimicking the human brain's neural networks, potentially offering substantial improvements in energy efficiency, real-time processing, and adaptability.
The global autonomous vehicle market is projected to expand at a compound annual growth rate (CAGR) of over 30% in the coming years, driven by advancements in artificial intelligence, sensor technologies, and computing power. Within this broader context, neuromorphic computing is poised to play a crucial role in addressing some of the key challenges faced by autonomous vehicles, particularly in areas such as perception, decision-making, and control.
One of the primary drivers for the adoption of neuromorphic computing in autonomous vehicles is the need for more efficient and powerful onboard processing capabilities. Traditional computing architectures struggle to handle the massive amounts of data generated by various sensors in real-time while maintaining low power consumption. Neuromorphic chips, with their ability to process information in a manner similar to the human brain, offer a promising solution to this challenge.
Several major automotive manufacturers have already begun investing in neuromorphic computing research and development for their autonomous vehicle programs. These companies recognize the potential of this technology to enhance the performance and safety of their self-driving systems while reducing power consumption and overall system complexity.
The market for neuromorphic computing in autonomous vehicles is not limited to passenger cars. Commercial vehicles, including trucks and buses, are also expected to benefit from this technology, particularly in long-haul transportation and logistics applications. The ability of neuromorphic systems to adapt to changing environments and learn from experience makes them well-suited for the diverse and often unpredictable conditions encountered in commercial transportation.
However, the market faces several challenges that need to be addressed for widespread adoption. These include the need for standardization, concerns about reliability and safety in critical applications, and the current high costs associated with neuromorphic hardware development and production. As the technology matures and economies of scale are achieved, these barriers are expected to diminish.
In conclusion, the market for neuromorphic computing in autonomous vehicles presents significant opportunities for growth and innovation. As the technology continues to evolve and demonstrate its value in real-world applications, it is likely to become an integral component of next-generation autonomous vehicle systems, driving further investment and development in this exciting field.
The global autonomous vehicle market is projected to expand at a compound annual growth rate (CAGR) of over 30% in the coming years, driven by advancements in artificial intelligence, sensor technologies, and computing power. Within this broader context, neuromorphic computing is poised to play a crucial role in addressing some of the key challenges faced by autonomous vehicles, particularly in areas such as perception, decision-making, and control.
One of the primary drivers for the adoption of neuromorphic computing in autonomous vehicles is the need for more efficient and powerful onboard processing capabilities. Traditional computing architectures struggle to handle the massive amounts of data generated by various sensors in real-time while maintaining low power consumption. Neuromorphic chips, with their ability to process information in a manner similar to the human brain, offer a promising solution to this challenge.
Several major automotive manufacturers have already begun investing in neuromorphic computing research and development for their autonomous vehicle programs. These companies recognize the potential of this technology to enhance the performance and safety of their self-driving systems while reducing power consumption and overall system complexity.
The market for neuromorphic computing in autonomous vehicles is not limited to passenger cars. Commercial vehicles, including trucks and buses, are also expected to benefit from this technology, particularly in long-haul transportation and logistics applications. The ability of neuromorphic systems to adapt to changing environments and learn from experience makes them well-suited for the diverse and often unpredictable conditions encountered in commercial transportation.
However, the market faces several challenges that need to be addressed for widespread adoption. These include the need for standardization, concerns about reliability and safety in critical applications, and the current high costs associated with neuromorphic hardware development and production. As the technology matures and economies of scale are achieved, these barriers are expected to diminish.
In conclusion, the market for neuromorphic computing in autonomous vehicles presents significant opportunities for growth and innovation. As the technology continues to evolve and demonstrate its value in real-world applications, it is likely to become an integral component of next-generation autonomous vehicle systems, driving further investment and development in this exciting field.
Current State and Challenges of Neuromorphic Accelerators
Neuromorphic accelerators have made significant strides in recent years, offering promising solutions for autonomous systems. These brain-inspired computing architectures aim to mimic the efficiency and adaptability of biological neural networks, potentially revolutionizing perception and control in autonomous applications.
The current state of neuromorphic accelerators is characterized by a diverse landscape of hardware implementations and software frameworks. Leading research institutions and tech giants have developed various neuromorphic chips, such as IBM's TrueNorth, Intel's Loihi, and BrainScaleS from the Human Brain Project. These chips demonstrate remarkable energy efficiency and parallel processing capabilities, crucial for real-time autonomous operations.
However, the deployment of neuromorphic accelerators in autonomous systems faces several challenges. One primary obstacle is the integration of these novel architectures with existing software ecosystems and algorithms. Many current perception and control algorithms are designed for traditional von Neumann architectures, requiring significant adaptation for neuromorphic hardware.
Another challenge lies in the scalability and reliability of neuromorphic systems. While promising results have been achieved in laboratory settings, scaling these technologies to meet the demands of real-world autonomous applications remains a hurdle. Ensuring consistent performance across varying environmental conditions and operational scenarios is crucial for widespread adoption.
The lack of standardization in neuromorphic computing presents an additional challenge. Different neuromorphic platforms often use proprietary programming models and interfaces, hindering interoperability and slowing down the development of a robust ecosystem. This fragmentation makes it difficult for developers to create portable applications across different neuromorphic accelerators.
Power consumption and thermal management also pose significant challenges, particularly in mobile autonomous systems with limited energy resources. While neuromorphic accelerators offer improved energy efficiency compared to traditional processors, further optimizations are necessary to meet the stringent power requirements of autonomous vehicles and drones.
Data representation and conversion between analog and digital domains remain areas of active research. Neuromorphic systems often operate on spike-based data, which requires efficient conversion mechanisms to interface with conventional sensors and actuators in autonomous systems.
Lastly, the interpretability and explainability of neuromorphic systems present challenges in safety-critical autonomous applications. Understanding the decision-making processes of these brain-inspired architectures is crucial for regulatory compliance and public trust in autonomous systems.
The current state of neuromorphic accelerators is characterized by a diverse landscape of hardware implementations and software frameworks. Leading research institutions and tech giants have developed various neuromorphic chips, such as IBM's TrueNorth, Intel's Loihi, and BrainScaleS from the Human Brain Project. These chips demonstrate remarkable energy efficiency and parallel processing capabilities, crucial for real-time autonomous operations.
However, the deployment of neuromorphic accelerators in autonomous systems faces several challenges. One primary obstacle is the integration of these novel architectures with existing software ecosystems and algorithms. Many current perception and control algorithms are designed for traditional von Neumann architectures, requiring significant adaptation for neuromorphic hardware.
Another challenge lies in the scalability and reliability of neuromorphic systems. While promising results have been achieved in laboratory settings, scaling these technologies to meet the demands of real-world autonomous applications remains a hurdle. Ensuring consistent performance across varying environmental conditions and operational scenarios is crucial for widespread adoption.
The lack of standardization in neuromorphic computing presents an additional challenge. Different neuromorphic platforms often use proprietary programming models and interfaces, hindering interoperability and slowing down the development of a robust ecosystem. This fragmentation makes it difficult for developers to create portable applications across different neuromorphic accelerators.
Power consumption and thermal management also pose significant challenges, particularly in mobile autonomous systems with limited energy resources. While neuromorphic accelerators offer improved energy efficiency compared to traditional processors, further optimizations are necessary to meet the stringent power requirements of autonomous vehicles and drones.
Data representation and conversion between analog and digital domains remain areas of active research. Neuromorphic systems often operate on spike-based data, which requires efficient conversion mechanisms to interface with conventional sensors and actuators in autonomous systems.
Lastly, the interpretability and explainability of neuromorphic systems present challenges in safety-critical autonomous applications. Understanding the decision-making processes of these brain-inspired architectures is crucial for regulatory compliance and public trust in autonomous systems.
Existing Deployment Strategies for Neuromorphic Accelerators
01 Neuromorphic hardware architecture
Neuromorphic accelerators employ specialized hardware architectures designed to mimic the structure and function of biological neural networks. These architectures often include arrays of artificial neurons and synapses, enabling parallel processing and efficient computation of neural network algorithms. The design focuses on low power consumption, high speed, and scalability for various AI applications.- Neuromorphic hardware architecture: Neuromorphic accelerators employ specialized hardware architectures designed to mimic the structure and function of biological neural networks. These architectures often include arrays of artificial neurons and synapses, enabling parallel processing and efficient implementation of neural network algorithms. The design focuses on optimizing energy efficiency, speed, and scalability for AI and machine learning tasks.
- Spiking neural networks implementation: Neuromorphic accelerators often implement spiking neural networks (SNNs), which more closely resemble biological neural networks. These systems process information using discrete spikes or events, rather than continuous values. This approach can lead to improved energy efficiency and performance in certain tasks, particularly in real-time processing and pattern recognition applications.
- On-chip learning and adaptation: Advanced neuromorphic accelerators incorporate on-chip learning capabilities, allowing the system to adapt and improve its performance over time. This feature enables continuous learning and optimization without the need for frequent off-chip training. The accelerators may use various learning algorithms, including unsupervised and reinforcement learning techniques, to update synaptic weights and neural connections.
- Integration with conventional computing systems: Neuromorphic accelerators are designed to integrate seamlessly with conventional computing systems, enabling hybrid architectures that combine the strengths of both neuromorphic and traditional computing paradigms. This integration allows for efficient processing of diverse workloads, with neuromorphic components handling specific AI and machine learning tasks while conventional processors manage other computational requirements.
- Application-specific optimizations: Neuromorphic accelerators can be tailored for specific applications or domains, such as computer vision, natural language processing, or robotics. These optimizations may involve customizing the neural network architecture, adjusting the number and type of processing elements, or implementing specialized interfaces for sensor integration. Such application-specific designs can significantly enhance performance and energy efficiency for targeted use cases.
02 Spiking neural networks implementation
Neuromorphic accelerators often implement spiking neural networks (SNNs), which more closely resemble biological neural networks. These systems process information using discrete spikes or events, rather than continuous values. This approach can lead to more energy-efficient computation and better temporal information processing, making it suitable for real-time applications and edge computing scenarios.Expand Specific Solutions03 On-chip learning and adaptation
Advanced neuromorphic accelerators incorporate on-chip learning capabilities, allowing the system to adapt and improve its performance over time. This feature enables continuous learning and fine-tuning of neural networks without the need for external training. The accelerators may use various learning algorithms, including unsupervised and reinforcement learning techniques, to optimize their performance for specific tasks.Expand Specific Solutions04 Integration with conventional computing systems
Neuromorphic accelerators are designed to integrate seamlessly with conventional computing systems, allowing for hybrid architectures that combine the strengths of both neuromorphic and traditional computing paradigms. This integration enables efficient processing of complex AI workloads while maintaining compatibility with existing software and hardware ecosystems. The accelerators may include interfaces for data transfer and synchronization with host systems.Expand Specific Solutions05 Application-specific optimizations
Neuromorphic accelerators can be optimized for specific applications or domains, such as computer vision, natural language processing, or robotics. These optimizations may involve tailored neural network architectures, specialized memory structures, or custom processing elements designed to accelerate particular types of computations. This approach allows for improved performance and energy efficiency in targeted use cases.Expand Specific Solutions
Key Players in Neuromorphic Hardware and Autonomous Technologies
The deployment of neuromorphic accelerators in autonomous systems is an emerging field at the intersection of artificial intelligence and robotics. The market is in its early growth stage, with significant potential for expansion as autonomous technologies mature. Key players like Tesla, Waymo, and TuSimple are driving innovation in perception and control systems for autonomous vehicles. Established automotive companies such as Bosch, Volvo, and Hyundai Mobis are also investing heavily in this area. The technology is still evolving, with companies like NVIDIA and Micron developing specialized hardware. Academic institutions like MIT and Peking University are contributing fundamental research. As the technology advances, we can expect increased competition and market consolidation in the coming years.
Tesla, Inc.
Technical Solution: Tesla's approach to neuromorphic acceleration in autonomous systems centers around their custom-designed AI chip, the Full Self-Driving (FSD) Computer. This chip is specifically tailored for neural network processing and computer vision tasks essential for autonomous driving. The FSD Computer contains two AI processors, each capable of 36 trillion operations per second (TOPS)[3]. Tesla's neural networks are designed to process raw data from cameras, radar, and ultrasonic sensors, performing tasks such as object detection, lane recognition, and depth estimation. For control, Tesla utilizes a model predictive control (MPC) algorithm that operates on the outputs of these perception networks[4]. The integration of perception and control is achieved through Tesla's Autopilot software, which runs on the FSD Computer and manages the entire autonomous driving stack.
Strengths: Vertically integrated solution, optimized for specific use case, energy-efficient. Weaknesses: Reliance primarily on vision-based perception, potentially limited flexibility for other applications.
Waymo LLC
Technical Solution: Waymo's approach to deploying neuromorphic accelerators in autonomous systems involves a combination of custom-designed hardware and sophisticated software. Their perception system utilizes a suite of sensors including LiDAR, radar, and cameras, processed by custom-built integrated circuits optimized for machine learning tasks[5]. These chips are designed to efficiently run neural networks for object detection, classification, and tracking. For control, Waymo employs a hierarchical planning system that operates at different time scales, from high-level route planning to low-level trajectory optimization[6]. The integration of perception and control is achieved through Waymo's proprietary software stack, which includes advanced simulation capabilities for testing and validation. Waymo's system is designed to handle complex urban environments and has demonstrated the ability to navigate without human intervention in certain areas.
Strengths: Extensive real-world testing, robust sensor fusion, advanced simulation capabilities. Weaknesses: Potentially high hardware costs, reliance on detailed mapping data.
Core Innovations in Neuromorphic Perception and Control
Neural network hardware device and system
PatentPendingUS20230422516A1
Innovation
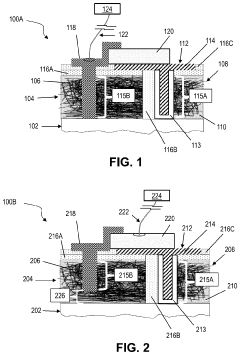
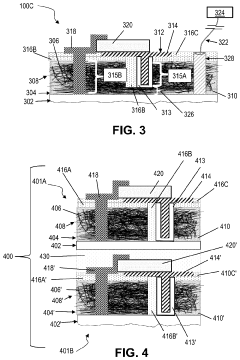
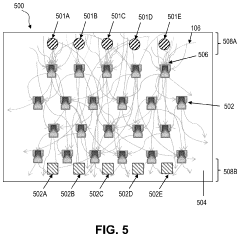
- A neural network device comprising a mesh layer of randomly dispersed conductive nano-strands with memristor devices and modulating devices that enable electrical communication between a large number of individual nano-strands, mimicking dendritic communication and allowing for non-deterministic signal propagation, exceeding the interconnect capabilities of conventional lithographic methods.
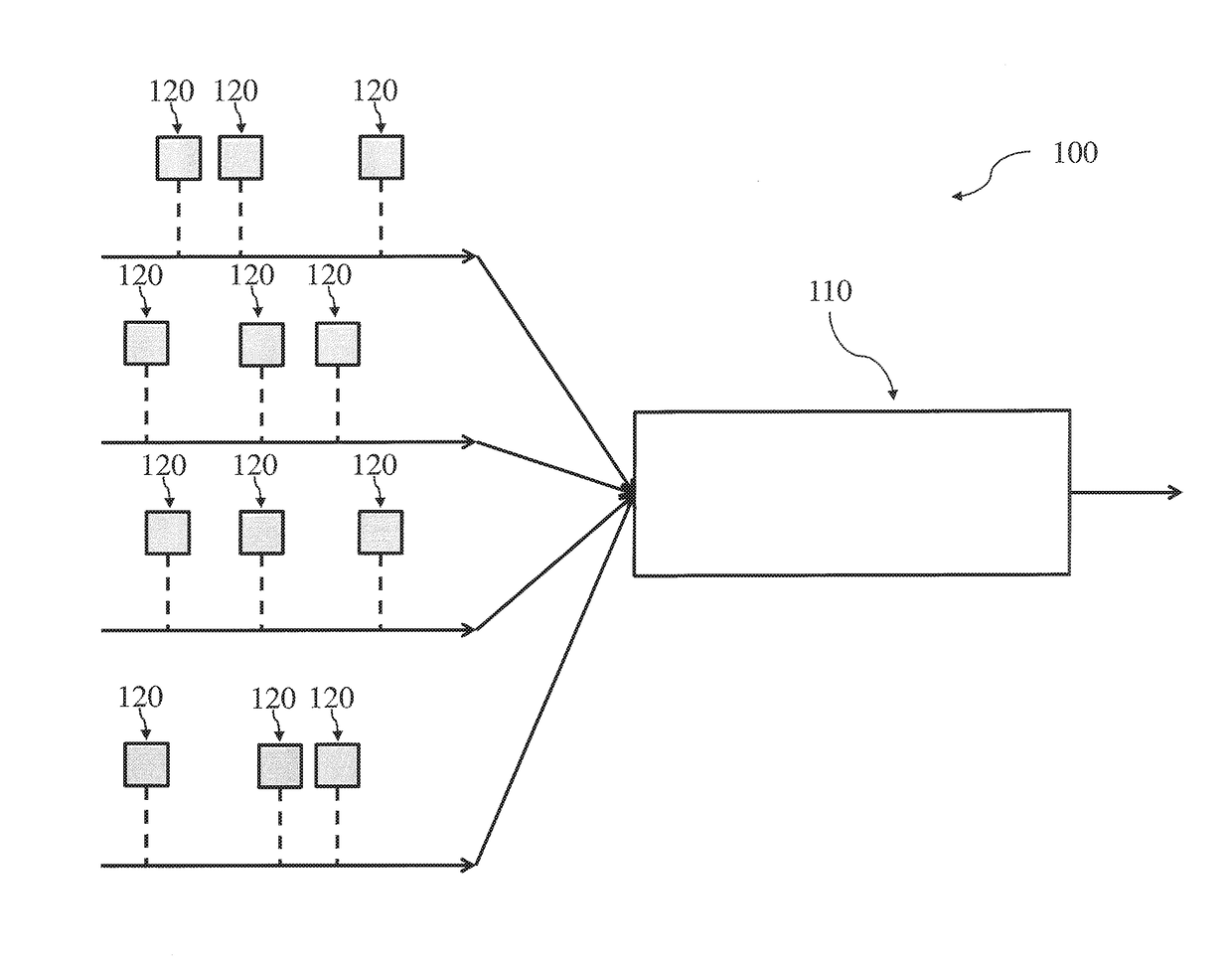
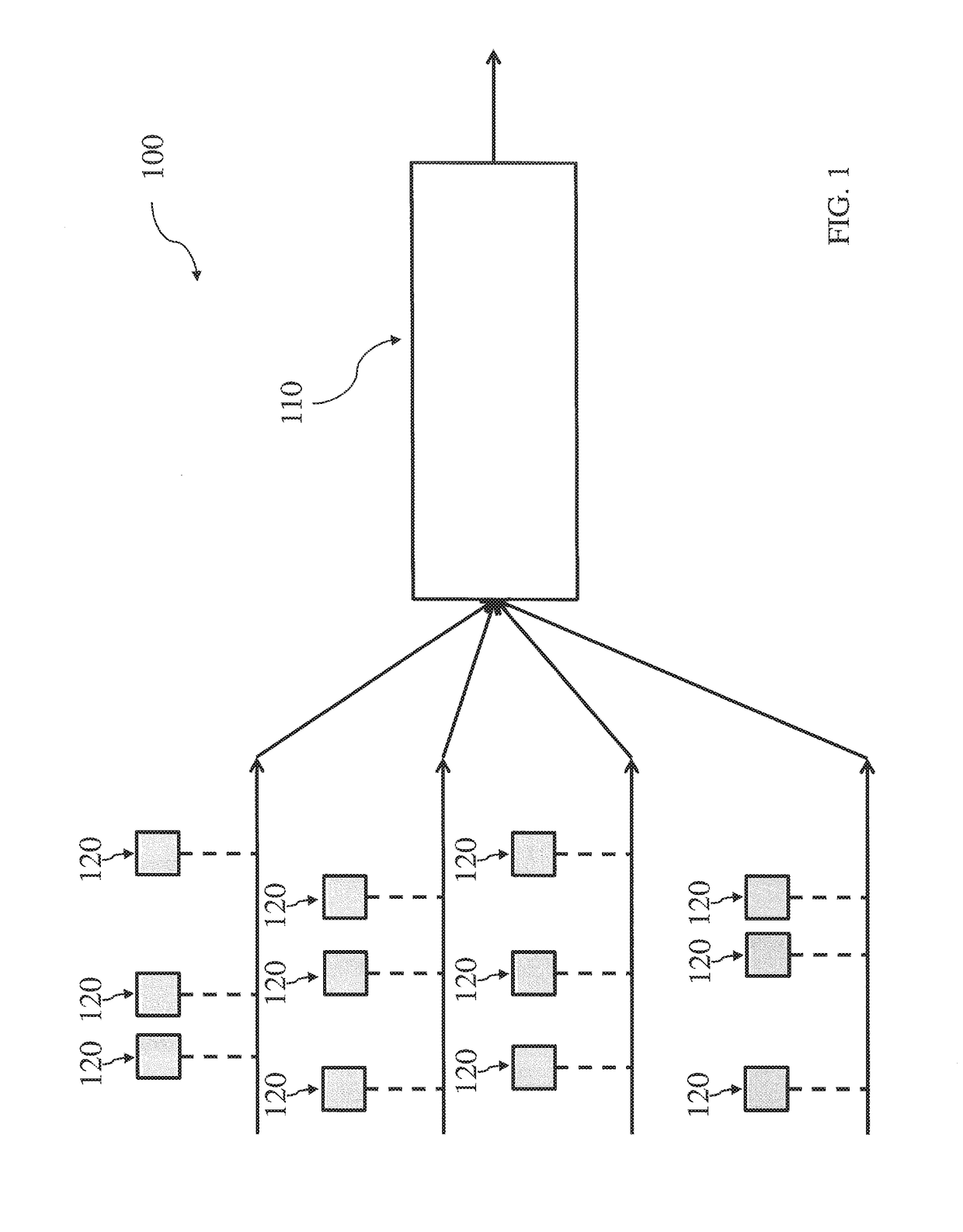
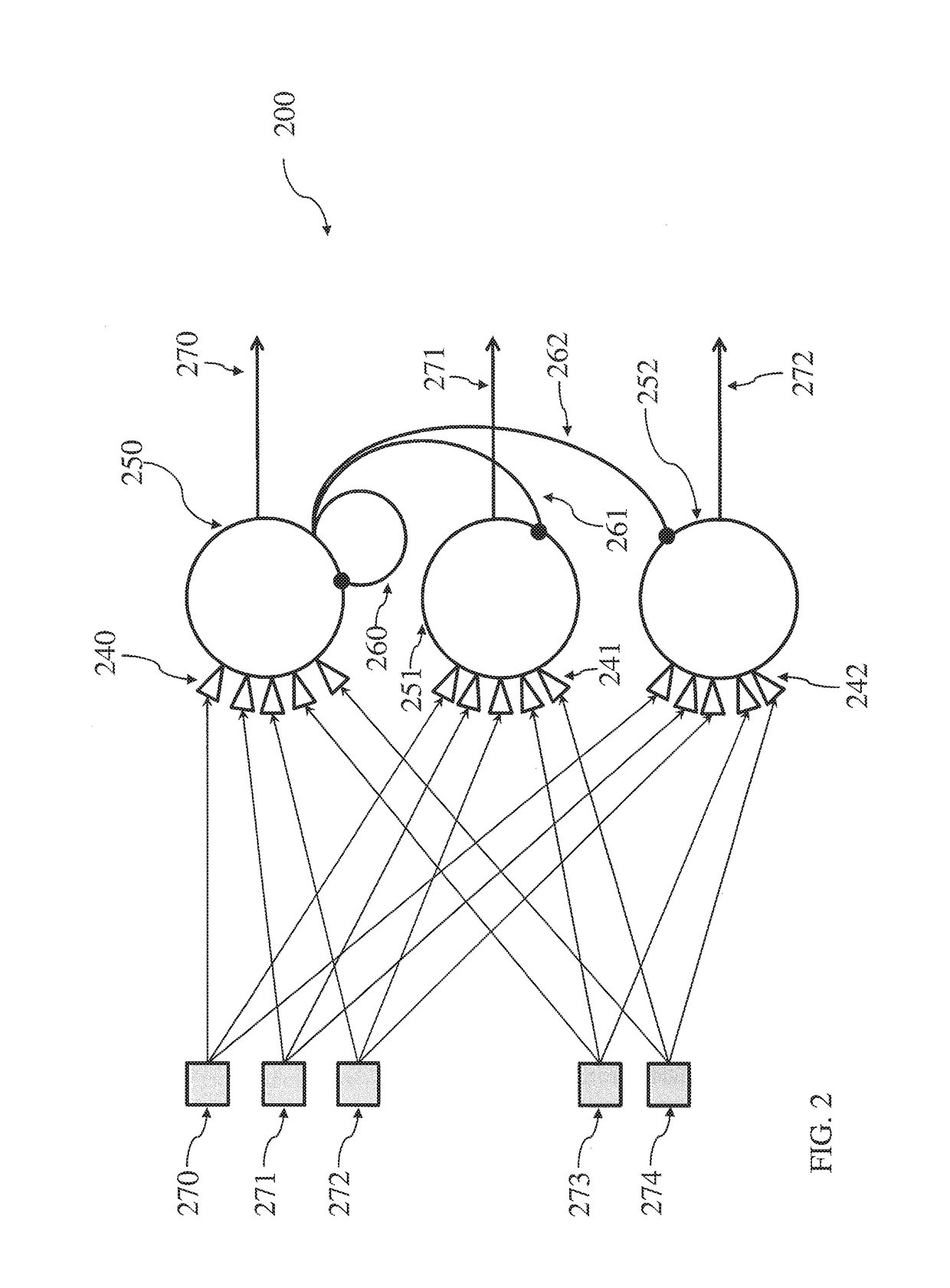
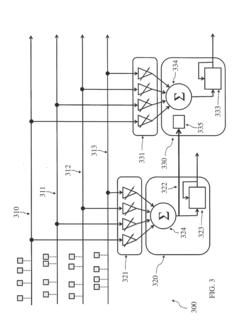
Neuromorphic architecture with multiple coupled neurons using internal state neuron information
PatentActiveUS20170372194A1
Innovation
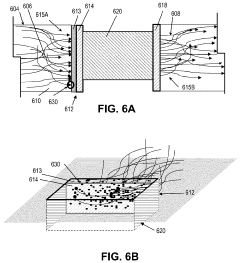
- A neuromorphic architecture featuring interconnected neurons with internal state information links, allowing for the transmission of internal state information across layers to modify the operation of other neurons, enhancing the system's performance and capability in data processing, pattern recognition, and correlation detection.
Safety and Reliability Considerations for Neuromorphic Deployments
The deployment of neuromorphic accelerators in autonomous systems introduces unique safety and reliability challenges that must be carefully addressed. These brain-inspired computing architectures, while offering potential advantages in energy efficiency and real-time processing, also present novel failure modes and vulnerabilities that differ from traditional computing systems.
One primary concern is the inherent variability and stochasticity of neuromorphic hardware, which can lead to unpredictable behavior in critical perception and control tasks. This variability stems from the analog nature of many neuromorphic implementations and can be exacerbated by environmental factors such as temperature fluctuations or electromagnetic interference. To mitigate these risks, robust error correction and fault tolerance mechanisms must be integrated into the neuromorphic system design.
Another crucial aspect is the need for rigorous testing and validation protocols specifically tailored to neuromorphic systems. Traditional software testing methodologies may not be sufficient to capture the complex dynamics of these bio-inspired architectures. Developing comprehensive simulation environments and hardware-in-the-loop testing frameworks is essential to ensure the reliability of neuromorphic accelerators in autonomous systems.
The interpretability and explainability of neuromorphic systems pose additional challenges for safety certification. Unlike conventional algorithms, the decision-making processes of neuromorphic networks can be opaque and difficult to audit. This lack of transparency could hinder the acceptance and regulatory approval of neuromorphic-based autonomous systems in safety-critical applications.
Redundancy and fail-safe mechanisms are critical components in ensuring the reliability of neuromorphic deployments. Implementing multiple, independent neuromorphic processing units with voting systems can help mitigate the impact of individual component failures. Additionally, designing graceful degradation pathways that allow the system to maintain basic functionality in the event of partial failures is crucial for maintaining safety in autonomous operations.
Cybersecurity considerations are also paramount, as neuromorphic systems may be vulnerable to novel forms of attacks that exploit their unique architectures. Developing robust security protocols and intrusion detection systems specifically designed for neuromorphic hardware is essential to protect against malicious interference or manipulation of autonomous system behavior.
Lastly, long-term reliability and aging effects of neuromorphic hardware must be carefully studied and addressed. The potential for gradual performance degradation or sudden failures over extended periods of operation could have severe implications for the safety of autonomous systems. Implementing proactive maintenance strategies and continuous monitoring systems is crucial to ensure the ongoing reliability of neuromorphic accelerators throughout their operational lifespan.
One primary concern is the inherent variability and stochasticity of neuromorphic hardware, which can lead to unpredictable behavior in critical perception and control tasks. This variability stems from the analog nature of many neuromorphic implementations and can be exacerbated by environmental factors such as temperature fluctuations or electromagnetic interference. To mitigate these risks, robust error correction and fault tolerance mechanisms must be integrated into the neuromorphic system design.
Another crucial aspect is the need for rigorous testing and validation protocols specifically tailored to neuromorphic systems. Traditional software testing methodologies may not be sufficient to capture the complex dynamics of these bio-inspired architectures. Developing comprehensive simulation environments and hardware-in-the-loop testing frameworks is essential to ensure the reliability of neuromorphic accelerators in autonomous systems.
The interpretability and explainability of neuromorphic systems pose additional challenges for safety certification. Unlike conventional algorithms, the decision-making processes of neuromorphic networks can be opaque and difficult to audit. This lack of transparency could hinder the acceptance and regulatory approval of neuromorphic-based autonomous systems in safety-critical applications.
Redundancy and fail-safe mechanisms are critical components in ensuring the reliability of neuromorphic deployments. Implementing multiple, independent neuromorphic processing units with voting systems can help mitigate the impact of individual component failures. Additionally, designing graceful degradation pathways that allow the system to maintain basic functionality in the event of partial failures is crucial for maintaining safety in autonomous operations.
Cybersecurity considerations are also paramount, as neuromorphic systems may be vulnerable to novel forms of attacks that exploit their unique architectures. Developing robust security protocols and intrusion detection systems specifically designed for neuromorphic hardware is essential to protect against malicious interference or manipulation of autonomous system behavior.
Lastly, long-term reliability and aging effects of neuromorphic hardware must be carefully studied and addressed. The potential for gradual performance degradation or sudden failures over extended periods of operation could have severe implications for the safety of autonomous systems. Implementing proactive maintenance strategies and continuous monitoring systems is crucial to ensure the ongoing reliability of neuromorphic accelerators throughout their operational lifespan.
Energy Efficiency and Scalability of Neuromorphic Solutions
Neuromorphic accelerators offer significant potential for enhancing energy efficiency and scalability in autonomous systems, particularly in the domains of perception and control. These bio-inspired computing architectures mimic the structure and function of biological neural networks, enabling efficient processing of sensory data and decision-making in real-time environments.
The energy efficiency of neuromorphic solutions stems from their event-driven nature and sparse activation patterns. Unlike traditional von Neumann architectures, neuromorphic systems only consume power when processing relevant information, significantly reducing overall energy consumption. This characteristic is particularly advantageous in autonomous systems, where power constraints are often a critical factor.
Scalability is another key advantage of neuromorphic accelerators. Their modular design allows for easy expansion to accommodate increasing computational demands. As autonomous systems grow in complexity, neuromorphic architectures can be scaled up by adding more neural processing units or interconnecting multiple neuromorphic chips, without a proportional increase in power consumption.
In perception tasks, neuromorphic accelerators excel at processing high-dimensional sensory data from multiple sources, such as cameras, LiDAR, and radar. Their parallel processing capabilities enable real-time feature extraction and pattern recognition, crucial for tasks like object detection and scene understanding in autonomous vehicles or drones.
For control applications, neuromorphic systems can implement adaptive and learning algorithms that mimic biological motor control. This approach allows for more flexible and robust control strategies, capable of adapting to changing environments and unforeseen circumstances. The low latency of neuromorphic processing is particularly beneficial for time-critical control decisions in autonomous systems.
However, challenges remain in fully realizing the potential of neuromorphic solutions. Developing efficient training algorithms for spiking neural networks, a common neuromorphic architecture, is an ongoing area of research. Additionally, integrating neuromorphic accelerators with existing autonomous system architectures requires careful consideration of hardware interfaces and software compatibility.
As the field progresses, we can expect to see neuromorphic accelerators playing an increasingly important role in autonomous systems. Their unique combination of energy efficiency and scalability positions them as a promising solution for addressing the growing computational demands of advanced perception and control tasks in autonomous applications.
The energy efficiency of neuromorphic solutions stems from their event-driven nature and sparse activation patterns. Unlike traditional von Neumann architectures, neuromorphic systems only consume power when processing relevant information, significantly reducing overall energy consumption. This characteristic is particularly advantageous in autonomous systems, where power constraints are often a critical factor.
Scalability is another key advantage of neuromorphic accelerators. Their modular design allows for easy expansion to accommodate increasing computational demands. As autonomous systems grow in complexity, neuromorphic architectures can be scaled up by adding more neural processing units or interconnecting multiple neuromorphic chips, without a proportional increase in power consumption.
In perception tasks, neuromorphic accelerators excel at processing high-dimensional sensory data from multiple sources, such as cameras, LiDAR, and radar. Their parallel processing capabilities enable real-time feature extraction and pattern recognition, crucial for tasks like object detection and scene understanding in autonomous vehicles or drones.
For control applications, neuromorphic systems can implement adaptive and learning algorithms that mimic biological motor control. This approach allows for more flexible and robust control strategies, capable of adapting to changing environments and unforeseen circumstances. The low latency of neuromorphic processing is particularly beneficial for time-critical control decisions in autonomous systems.
However, challenges remain in fully realizing the potential of neuromorphic solutions. Developing efficient training algorithms for spiking neural networks, a common neuromorphic architecture, is an ongoing area of research. Additionally, integrating neuromorphic accelerators with existing autonomous system architectures requires careful consideration of hardware interfaces and software compatibility.
As the field progresses, we can expect to see neuromorphic accelerators playing an increasingly important role in autonomous systems. Their unique combination of energy efficiency and scalability positions them as a promising solution for addressing the growing computational demands of advanced perception and control tasks in autonomous applications.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!