

Model Predictive Control In Long-Horizon Planning Problems
SEP 9, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
MPC Evolution and Long-Horizon Planning Objectives
Model Predictive Control (MPC) has evolved significantly since its inception in the 1970s, transforming from a theoretical concept to a practical control methodology widely implemented across various industries. The evolution of MPC can be traced through several distinct phases, each marked by significant advancements in computational capabilities and algorithmic innovations.
In its early development, MPC was primarily limited to slow-dynamic systems due to computational constraints. The 1980s saw the first industrial applications in petrochemical processes, where the relatively slow system dynamics allowed sufficient time for the necessary calculations. As computing power increased through the 1990s and 2000s, MPC applications expanded to faster systems including automotive, aerospace, and robotics.
A pivotal advancement in MPC evolution has been the development of efficient optimization algorithms that enable real-time implementation. Traditional MPC formulations struggled with long-horizon planning due to the exponential growth in computational complexity. Modern approaches incorporate techniques such as sparse optimization, multi-rate formulations, and hierarchical structures to manage this complexity.
The integration of machine learning with MPC represents a recent evolutionary milestone. Data-driven MPC approaches use historical system data to improve model accuracy and prediction capabilities, particularly valuable for systems with complex dynamics or significant uncertainties. This hybrid approach combines the theoretical guarantees of traditional MPC with the adaptability of learning-based methods.
Long-horizon planning objectives present unique challenges that have driven specific MPC innovations. These objectives typically involve decision-making over extended time periods, often with increasing uncertainty as the prediction horizon extends. The primary goal is to balance immediate control actions with long-term strategic planning, ensuring both short-term stability and long-term optimality.
Key objectives in long-horizon MPC include computational tractability, robustness against uncertainty propagation, and maintaining feasibility across the entire planning horizon. Applications requiring long-horizon planning—such as energy management systems, autonomous vehicle trajectory planning, and supply chain optimization—have pushed researchers to develop specialized MPC variants.
Recent research focuses on addressing the "curse of dimensionality" in long-horizon problems through techniques like scenario-based MPC, moving horizon estimation, and approximate dynamic programming. These approaches aim to make long-horizon planning computationally viable while preserving the core benefits of the MPC framework: constraint handling, optimality, and adaptability to changing conditions.
In its early development, MPC was primarily limited to slow-dynamic systems due to computational constraints. The 1980s saw the first industrial applications in petrochemical processes, where the relatively slow system dynamics allowed sufficient time for the necessary calculations. As computing power increased through the 1990s and 2000s, MPC applications expanded to faster systems including automotive, aerospace, and robotics.
A pivotal advancement in MPC evolution has been the development of efficient optimization algorithms that enable real-time implementation. Traditional MPC formulations struggled with long-horizon planning due to the exponential growth in computational complexity. Modern approaches incorporate techniques such as sparse optimization, multi-rate formulations, and hierarchical structures to manage this complexity.
The integration of machine learning with MPC represents a recent evolutionary milestone. Data-driven MPC approaches use historical system data to improve model accuracy and prediction capabilities, particularly valuable for systems with complex dynamics or significant uncertainties. This hybrid approach combines the theoretical guarantees of traditional MPC with the adaptability of learning-based methods.
Long-horizon planning objectives present unique challenges that have driven specific MPC innovations. These objectives typically involve decision-making over extended time periods, often with increasing uncertainty as the prediction horizon extends. The primary goal is to balance immediate control actions with long-term strategic planning, ensuring both short-term stability and long-term optimality.
Key objectives in long-horizon MPC include computational tractability, robustness against uncertainty propagation, and maintaining feasibility across the entire planning horizon. Applications requiring long-horizon planning—such as energy management systems, autonomous vehicle trajectory planning, and supply chain optimization—have pushed researchers to develop specialized MPC variants.
Recent research focuses on addressing the "curse of dimensionality" in long-horizon problems through techniques like scenario-based MPC, moving horizon estimation, and approximate dynamic programming. These approaches aim to make long-horizon planning computationally viable while preserving the core benefits of the MPC framework: constraint handling, optimality, and adaptability to changing conditions.
Market Applications and Demand Analysis for Long-Horizon MPC
The market for Model Predictive Control (MPC) in long-horizon planning applications has witnessed substantial growth across multiple sectors. Industries facing complex operational challenges with extended planning horizons are increasingly adopting MPC solutions to optimize performance while respecting system constraints. This market expansion is driven by the growing complexity of industrial processes and the increasing availability of computational resources necessary for implementing sophisticated control algorithms.
In the energy sector, long-horizon MPC has found significant applications in power grid management, renewable energy integration, and energy storage optimization. Grid operators utilize MPC to balance supply and demand over extended periods while accounting for the intermittency of renewable sources. The global energy management systems market, where MPC plays a crucial role, is projected to grow substantially as countries worldwide pursue decarbonization goals.
Process industries represent another major market segment for long-horizon MPC applications. Chemical plants, refineries, and manufacturing facilities employ MPC to optimize production schedules, manage inventory levels, and coordinate complex process chains. These implementations have demonstrated operational cost reductions of 2-5% while improving product quality and consistency.
The automotive and transportation sectors are emerging as high-potential markets for long-horizon MPC. Advanced driver assistance systems and autonomous vehicles leverage MPC for trajectory planning and vehicle control under varying traffic and environmental conditions. Similarly, logistics companies implement MPC for fleet management and route optimization, resulting in fuel savings and improved delivery performance.
Supply chain management represents a rapidly growing application area for long-horizon MPC. Companies facing volatile demand patterns, complex supplier networks, and global distribution challenges are turning to MPC-based solutions to optimize inventory levels, production scheduling, and distribution planning. This trend has accelerated following global supply chain disruptions, as organizations seek more resilient planning approaches.
Water management systems, including reservoir operations, irrigation networks, and urban water distribution, constitute another significant market for long-horizon MPC. These applications are particularly valuable in regions facing water scarcity or experiencing increasing climate variability, where optimal resource allocation over extended time horizons is critical.
Market analysis indicates that the adoption of long-horizon MPC solutions is constrained primarily by implementation complexity, integration challenges with existing systems, and the specialized expertise required. However, the development of more accessible software platforms, cloud-based computing resources, and industry-specific solution packages is gradually addressing these barriers, expanding the potential market reach.
In the energy sector, long-horizon MPC has found significant applications in power grid management, renewable energy integration, and energy storage optimization. Grid operators utilize MPC to balance supply and demand over extended periods while accounting for the intermittency of renewable sources. The global energy management systems market, where MPC plays a crucial role, is projected to grow substantially as countries worldwide pursue decarbonization goals.
Process industries represent another major market segment for long-horizon MPC applications. Chemical plants, refineries, and manufacturing facilities employ MPC to optimize production schedules, manage inventory levels, and coordinate complex process chains. These implementations have demonstrated operational cost reductions of 2-5% while improving product quality and consistency.
The automotive and transportation sectors are emerging as high-potential markets for long-horizon MPC. Advanced driver assistance systems and autonomous vehicles leverage MPC for trajectory planning and vehicle control under varying traffic and environmental conditions. Similarly, logistics companies implement MPC for fleet management and route optimization, resulting in fuel savings and improved delivery performance.
Supply chain management represents a rapidly growing application area for long-horizon MPC. Companies facing volatile demand patterns, complex supplier networks, and global distribution challenges are turning to MPC-based solutions to optimize inventory levels, production scheduling, and distribution planning. This trend has accelerated following global supply chain disruptions, as organizations seek more resilient planning approaches.
Water management systems, including reservoir operations, irrigation networks, and urban water distribution, constitute another significant market for long-horizon MPC. These applications are particularly valuable in regions facing water scarcity or experiencing increasing climate variability, where optimal resource allocation over extended time horizons is critical.
Market analysis indicates that the adoption of long-horizon MPC solutions is constrained primarily by implementation complexity, integration challenges with existing systems, and the specialized expertise required. However, the development of more accessible software platforms, cloud-based computing resources, and industry-specific solution packages is gradually addressing these barriers, expanding the potential market reach.
Technical Challenges in Long-Horizon MPC Implementation
Implementing Model Predictive Control (MPC) for long-horizon planning problems presents several significant technical challenges that researchers and engineers must overcome. The computational complexity increases exponentially with the prediction horizon length, making real-time implementation difficult for systems requiring extensive future planning. This complexity stems from the need to solve large-scale optimization problems at each control interval, often involving numerous decision variables and constraints.
The curse of dimensionality becomes particularly acute in long-horizon MPC applications. As the planning horizon extends, the state space grows dramatically, requiring sophisticated numerical methods and substantial computational resources. Even with modern computing hardware, solving these optimization problems within the required time constraints remains challenging for many practical applications.
Model uncertainty compounds these difficulties, as prediction errors accumulate over longer horizons. Small inaccuracies in the system model can lead to significant deviations between predicted and actual behavior as the prediction extends further into the future. This uncertainty necessitates robust MPC formulations that can maintain stability and performance despite model imperfections.
Nonlinearities in system dynamics present another major challenge. While linear MPC benefits from well-established solution methods, nonlinear MPC for long horizons often requires complex numerical techniques such as sequential quadratic programming or interior point methods. These approaches significantly increase computational demands and may struggle to converge within timing constraints.
Constraint handling becomes increasingly complex in long-horizon problems. The need to enforce constraints over extended prediction periods introduces additional computational burden and may lead to feasibility issues. Techniques like constraint softening or prioritization are often necessary but introduce additional design complexities.
Real-time implementation requirements further complicate matters. Many applications demand control updates at high frequencies, leaving limited time for optimization. This has led to research in approximate MPC methods, including explicit MPC, move blocking strategies, and warm-starting techniques, each with their own limitations and trade-offs.
The stability guarantees for long-horizon MPC present theoretical challenges as well. Traditional approaches like terminal constraints or costs may become overly restrictive or difficult to compute for extended horizons. Researchers continue to develop alternative stability frameworks that balance theoretical guarantees with practical implementation concerns.
The curse of dimensionality becomes particularly acute in long-horizon MPC applications. As the planning horizon extends, the state space grows dramatically, requiring sophisticated numerical methods and substantial computational resources. Even with modern computing hardware, solving these optimization problems within the required time constraints remains challenging for many practical applications.
Model uncertainty compounds these difficulties, as prediction errors accumulate over longer horizons. Small inaccuracies in the system model can lead to significant deviations between predicted and actual behavior as the prediction extends further into the future. This uncertainty necessitates robust MPC formulations that can maintain stability and performance despite model imperfections.
Nonlinearities in system dynamics present another major challenge. While linear MPC benefits from well-established solution methods, nonlinear MPC for long horizons often requires complex numerical techniques such as sequential quadratic programming or interior point methods. These approaches significantly increase computational demands and may struggle to converge within timing constraints.
Constraint handling becomes increasingly complex in long-horizon problems. The need to enforce constraints over extended prediction periods introduces additional computational burden and may lead to feasibility issues. Techniques like constraint softening or prioritization are often necessary but introduce additional design complexities.
Real-time implementation requirements further complicate matters. Many applications demand control updates at high frequencies, leaving limited time for optimization. This has led to research in approximate MPC methods, including explicit MPC, move blocking strategies, and warm-starting techniques, each with their own limitations and trade-offs.
The stability guarantees for long-horizon MPC present theoretical challenges as well. Traditional approaches like terminal constraints or costs may become overly restrictive or difficult to compute for extended horizons. Researchers continue to develop alternative stability frameworks that balance theoretical guarantees with practical implementation concerns.
Current Long-Horizon MPC Methodologies
01 Long-horizon MPC for autonomous vehicle navigation
Model Predictive Control (MPC) with long-horizon planning capabilities is applied to autonomous vehicle navigation systems. These systems use predictive models to anticipate future states and optimize control decisions over extended time periods. Long-horizon planning allows vehicles to navigate complex environments by considering multiple future scenarios, enabling smoother trajectories and improved safety in dynamic conditions. The approach typically incorporates environmental constraints, obstacle avoidance, and vehicle dynamics to generate optimal control strategies.- Long-horizon MPC for autonomous vehicle navigation: Model Predictive Control (MPC) with long-horizon planning capabilities is applied to autonomous vehicle navigation systems. These systems use predictive models to anticipate future states and optimize control decisions over extended time periods. Long-horizon planning allows vehicles to navigate complex environments by considering multiple future scenarios, avoiding obstacles, and maintaining stability while following optimal trajectories. The approach enables smoother path planning and more efficient navigation in dynamic environments.
- MPC techniques for industrial process optimization: Long-horizon Model Predictive Control is implemented in industrial processes to optimize operations over extended time periods. These systems incorporate process models to predict future behaviors and determine optimal control actions while respecting operational constraints. The long planning horizon allows for better management of slow-responding processes, improved energy efficiency, and enhanced product quality control. Industrial applications include manufacturing systems, chemical processes, and production planning where stability and efficiency over time are critical factors.
- Computational methods for efficient long-horizon MPC: Advanced computational techniques are developed to address the computational complexity of long-horizon Model Predictive Control. These methods include hierarchical planning approaches, decomposition algorithms, and efficient optimization solvers that make extended prediction horizons feasible in real-time applications. The techniques reduce computational burden while maintaining control performance by strategically simplifying models at different time scales or employing parallel processing architectures. This enables practical implementation of long-horizon MPC in systems with limited computational resources.
- MPC for energy systems and grid management: Long-horizon Model Predictive Control is applied to energy systems and power grid management to optimize resource allocation over extended time periods. These applications use predictive models to forecast energy demand, renewable generation, and grid conditions to determine optimal control strategies. The long planning horizon allows for better integration of intermittent renewable energy sources, demand response programs, and energy storage systems. This approach improves overall system efficiency, reduces operational costs, and enhances grid stability through proactive management of resources.
- Robust MPC frameworks for handling uncertainty: Robust long-horizon Model Predictive Control frameworks are designed to handle uncertainties in system dynamics, disturbances, and modeling errors. These approaches incorporate uncertainty bounds, stochastic predictions, or scenario-based methods to ensure reliable performance despite unpredictable elements. The extended planning horizon allows the controller to anticipate potential future disturbances and prepare contingency plans accordingly. This results in more resilient control systems that maintain stability and performance even under significant uncertainty, making them suitable for critical applications where reliability is paramount.
02 MPC techniques for industrial process optimization
Long-horizon Model Predictive Control is implemented in industrial processes to optimize operations over extended time periods. These implementations use mathematical models to predict future process behaviors and determine optimal control actions while accounting for operational constraints. The long planning horizon allows industrial systems to anticipate changes in demand, resource availability, or operating conditions, resulting in improved efficiency, reduced energy consumption, and enhanced product quality. These techniques are particularly valuable in continuous manufacturing processes where stability and consistency are critical.Expand Specific Solutions03 Computational methods for efficient long-horizon MPC
Advanced computational methods enable efficient implementation of long-horizon Model Predictive Control despite its inherent computational complexity. These approaches include hierarchical decomposition, parallel processing algorithms, and approximation techniques that maintain control performance while reducing computational load. By optimizing the mathematical formulation and leveraging specialized solvers, these methods allow real-time implementation of MPC with extended prediction horizons. This makes long-horizon planning practical for applications with limited computational resources or strict timing requirements.Expand Specific Solutions04 Integration of machine learning with long-horizon MPC
Machine learning techniques are integrated with Model Predictive Control to enhance long-horizon planning capabilities. These hybrid approaches use data-driven models to improve prediction accuracy and adaptability in complex or uncertain environments. Neural networks, reinforcement learning, and other AI methods help identify patterns, learn system dynamics, and optimize control strategies over extended time horizons. This integration enables MPC systems to handle non-linear dynamics, adapt to changing conditions, and improve performance through continuous learning from operational data.Expand Specific Solutions05 Robust MPC for uncertainty management in long-horizon planning
Robust Model Predictive Control frameworks address uncertainties in long-horizon planning applications. These approaches explicitly account for model inaccuracies, disturbances, and variability in operating conditions when optimizing control decisions. By incorporating uncertainty bounds, probabilistic constraints, or scenario-based evaluations, robust MPC ensures stable and reliable performance even when faced with unpredictable elements. This is particularly important for long-horizon planning where prediction errors can accumulate over time, making traditional deterministic approaches insufficient for maintaining system stability and constraint satisfaction.Expand Specific Solutions
Leading Research Groups and Industrial Adopters
Model Predictive Control (MPC) in long-horizon planning problems is evolving rapidly in a growth market phase, with increasing applications across autonomous vehicles, industrial automation, and energy systems. The market is expanding as computational capabilities advance, with an estimated annual growth rate of 8-10%. Technologically, companies like NVIDIA, ZF Friedrichshafen, and Continental Automotive are leading commercial applications with advanced hardware-software integration, while academic institutions such as Beijing Institute of Technology and University of Florida are pioneering theoretical advancements. Research collaborations between industry players like Bosch, IBM, and Mitsubishi Electric with universities are accelerating the technology's maturity, particularly in handling complex constraints and uncertainty in long-term planning scenarios.
NVIDIA Corp.
Technical Solution: NVIDIA has developed advanced GPU-accelerated Model Predictive Control (MPC) frameworks specifically designed for long-horizon planning problems. Their approach leverages parallel computing architecture to solve complex optimization problems in real-time, which is crucial for long-horizon MPC applications. NVIDIA's GPU-based MPC implementation achieves up to 30x speedup compared to CPU implementations, enabling previously intractable long-horizon planning scenarios to become feasible. Their CUDA-based optimization solvers specifically target the computational bottlenecks in MPC formulations with extended prediction horizons. Additionally, NVIDIA has integrated these capabilities into their DRIVE platform for autonomous vehicles, where long-horizon planning is essential for safe navigation and complex maneuver planning. Their implementation supports both linear and nonlinear MPC formulations with horizons extending to hundreds of prediction steps while maintaining real-time performance.
Strengths: Unparalleled computational acceleration for complex MPC problems; seamless integration with AI workflows; extensive software ecosystem supporting implementation. Weaknesses: Hardware dependency on NVIDIA GPUs; higher power consumption compared to specialized ASIC solutions; requires expertise in CUDA programming for optimal performance.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has pioneered industrial-grade Model Predictive Control solutions for long-horizon planning problems across multiple sectors including process control, building management, and aerospace. Their Profit Suite MPC technology incorporates advanced algorithms specifically designed to handle the computational challenges of extended prediction horizons. Honeywell's approach combines robust state estimation with efficient quadratic programming solvers that can maintain stability even with prediction horizons spanning hours or days of operation. Their implementation includes adaptive horizon techniques that dynamically adjust the prediction window based on system conditions and computational constraints. Honeywell has also developed specialized constraint handling methods that maintain feasibility across long horizons while accounting for plant-model mismatch. Their MPC solutions incorporate economic objectives directly into the control formulation, enabling optimization across operational timescales that align with business planning horizons.
Strengths: Proven industrial deployment record; robust performance in mission-critical applications; extensive domain expertise across multiple industries. Weaknesses: Solutions often require significant customization for specific applications; higher implementation costs compared to generic MPC tools; proprietary nature limits academic collaboration and transparency.
Key Patents and Research Breakthroughs
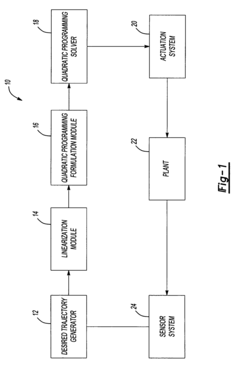
System and method of accelerated active set search for quadratic programming in real-time model predictive control
PatentInactiveEP1447727A2
Innovation
- The algorithm employs an active set hot start method, consistently or inconsistently updating the active set of binding constraints, and detects linear dependency without pre-processing, using a 'big-K' formulation to achieve a feasible and optimal solution within milliseconds, applicable to sparse optimization problems.


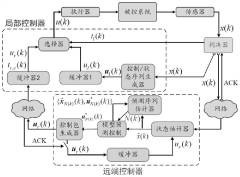
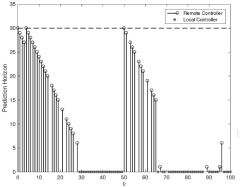
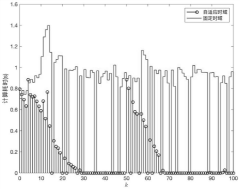
Networked dual-mode adaptive time domain model control method and system
PatentActiveCN111830826A
Innovation
- The networked dual-mode adaptive time domain model control method is adopted to optimize the calculation by designing a remote adaptive time domain model predictive controller and a local controller, combined with a state estimator, a predictive time domain estimator, a model predictive controller and a buffer. process, and determines which controller to use through the decision maker to achieve dual-mode adaptive time domain model predictive control.
Computational Resource Requirements and Optimization
Model Predictive Control (MPC) in long-horizon planning problems faces significant computational challenges that directly impact implementation feasibility. The computational complexity of MPC algorithms typically scales exponentially with the prediction horizon length, creating substantial resource demands for real-time applications. This complexity stems from the need to solve optimization problems repeatedly at each control interval, with each solution requiring matrix operations whose dimensions grow with the horizon length.
Memory requirements present another critical constraint, particularly for embedded systems with limited resources. Long-horizon MPC implementations must store large state transition matrices, constraint definitions, and intermediate calculation results. For complex systems with high-dimensional state spaces, these memory requirements can quickly exceed available hardware capabilities, necessitating trade-offs between model fidelity and computational practicality.
Processing time represents perhaps the most significant barrier to long-horizon MPC deployment. The iterative optimization process must complete within strict timing constraints to maintain control stability. Research indicates that for many industrial applications, optimization solution times exceeding 10-100 milliseconds become problematic for maintaining adequate control performance, creating a fundamental tension between horizon length and real-time feasibility.
Several optimization approaches have emerged to address these computational challenges. Explicit MPC pre-computes control laws offline, storing them in lookup tables for real-time implementation. While this dramatically reduces online computation, memory requirements grow exponentially with problem dimensions, limiting applicability to relatively simple systems. Move blocking strategies reduce computational load by assuming constant control inputs across multiple time steps, effectively decreasing the number of decision variables.
Hierarchical MPC implementations decompose the control problem into multiple timescales, with long-horizon planning occurring at a slower rate than short-horizon control execution. This approach balances computational efficiency with planning capability. Recent advances in algorithmic efficiency have produced specialized solvers like OSQP and FORCES Pro that exploit problem structure for dramatic performance improvements.
Hardware acceleration represents another promising direction, with GPU implementations demonstrating 10-100× speedups for certain MPC formulations. FPGA implementations offer deterministic timing guarantees critical for safety-critical applications, while custom ASIC solutions provide maximum performance for standardized control problems.
Memory requirements present another critical constraint, particularly for embedded systems with limited resources. Long-horizon MPC implementations must store large state transition matrices, constraint definitions, and intermediate calculation results. For complex systems with high-dimensional state spaces, these memory requirements can quickly exceed available hardware capabilities, necessitating trade-offs between model fidelity and computational practicality.
Processing time represents perhaps the most significant barrier to long-horizon MPC deployment. The iterative optimization process must complete within strict timing constraints to maintain control stability. Research indicates that for many industrial applications, optimization solution times exceeding 10-100 milliseconds become problematic for maintaining adequate control performance, creating a fundamental tension between horizon length and real-time feasibility.
Several optimization approaches have emerged to address these computational challenges. Explicit MPC pre-computes control laws offline, storing them in lookup tables for real-time implementation. While this dramatically reduces online computation, memory requirements grow exponentially with problem dimensions, limiting applicability to relatively simple systems. Move blocking strategies reduce computational load by assuming constant control inputs across multiple time steps, effectively decreasing the number of decision variables.
Hierarchical MPC implementations decompose the control problem into multiple timescales, with long-horizon planning occurring at a slower rate than short-horizon control execution. This approach balances computational efficiency with planning capability. Recent advances in algorithmic efficiency have produced specialized solvers like OSQP and FORCES Pro that exploit problem structure for dramatic performance improvements.
Hardware acceleration represents another promising direction, with GPU implementations demonstrating 10-100× speedups for certain MPC formulations. FPGA implementations offer deterministic timing guarantees critical for safety-critical applications, while custom ASIC solutions provide maximum performance for standardized control problems.
Integration with Machine Learning Techniques
The integration of Machine Learning (ML) techniques with Model Predictive Control (MPC) represents a significant advancement in addressing long-horizon planning problems. Traditional MPC approaches often struggle with computational complexity when planning horizons extend, but ML methods offer promising solutions to enhance efficiency and performance.
Machine learning algorithms can be leveraged to approximate complex dynamics models within the MPC framework. By training neural networks on historical system data, these learned models can replace or augment physics-based models, significantly reducing computational overhead while maintaining prediction accuracy. This approach is particularly valuable in systems where first-principles modeling is challenging or incomplete.
Reinforcement Learning (RL) integration with MPC creates powerful hybrid controllers that combine the strengths of both methodologies. MPC provides a structured optimization framework with explicit constraint handling, while RL contributes adaptive learning capabilities and long-term reward optimization. This synergy enables controllers to improve performance over time through experience while maintaining safety guarantees inherent in MPC.
Data-driven prediction of disturbances and uncertainties represents another valuable integration point. ML techniques can analyze patterns in historical disturbance data to provide more accurate forecasts for the MPC algorithm, improving robustness in uncertain environments. These predictive models can adapt online as new data becomes available, continuously enhancing controller performance.
Computational acceleration through ML presents a promising direction for long-horizon planning. Techniques such as neural network warm-starting of optimization solvers, learned early termination policies, and intelligent horizon length adaptation can dramatically reduce solution times. Recent research demonstrates that ML-based surrogate models can achieve order-of-magnitude speedups while maintaining near-optimal control performance.
Transfer learning approaches enable knowledge sharing between related control tasks, reducing the data requirements for adapting to new scenarios. An MPC controller trained on one system can be fine-tuned for similar systems using limited data, accelerating deployment across multiple applications or operating conditions.
Explainable AI techniques are increasingly important when integrating ML with safety-critical control systems. Methods that provide interpretability of learned components help build trust in hybrid controllers and facilitate regulatory approval. Recent advances in this area include attention mechanisms that highlight which features most influence control decisions and symbolic regression techniques that extract interpretable mathematical expressions from neural networks.
Machine learning algorithms can be leveraged to approximate complex dynamics models within the MPC framework. By training neural networks on historical system data, these learned models can replace or augment physics-based models, significantly reducing computational overhead while maintaining prediction accuracy. This approach is particularly valuable in systems where first-principles modeling is challenging or incomplete.
Reinforcement Learning (RL) integration with MPC creates powerful hybrid controllers that combine the strengths of both methodologies. MPC provides a structured optimization framework with explicit constraint handling, while RL contributes adaptive learning capabilities and long-term reward optimization. This synergy enables controllers to improve performance over time through experience while maintaining safety guarantees inherent in MPC.
Data-driven prediction of disturbances and uncertainties represents another valuable integration point. ML techniques can analyze patterns in historical disturbance data to provide more accurate forecasts for the MPC algorithm, improving robustness in uncertain environments. These predictive models can adapt online as new data becomes available, continuously enhancing controller performance.
Computational acceleration through ML presents a promising direction for long-horizon planning. Techniques such as neural network warm-starting of optimization solvers, learned early termination policies, and intelligent horizon length adaptation can dramatically reduce solution times. Recent research demonstrates that ML-based surrogate models can achieve order-of-magnitude speedups while maintaining near-optimal control performance.
Transfer learning approaches enable knowledge sharing between related control tasks, reducing the data requirements for adapting to new scenarios. An MPC controller trained on one system can be fine-tuned for similar systems using limited data, accelerating deployment across multiple applications or operating conditions.
Explainable AI techniques are increasingly important when integrating ML with safety-critical control systems. Methods that provide interpretability of learned components help build trust in hybrid controllers and facilitate regulatory approval. Recent advances in this area include attention mechanisms that highlight which features most influence control decisions and symbolic regression techniques that extract interpretable mathematical expressions from neural networks.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!