

Redundant drive three-freedom-degree parallel mechanism with double motion platforms
A technology of motion platform and degree of freedom, which is applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of ball joints, increase the difficulty of manufacturing, and difficult control of precision, so as to improve the rigidity and carrying capacity and facilitate manufacturing Simple effect of installation and kinematic model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Further description will be given below in conjunction with the embodiments shown in the accompanying drawings.
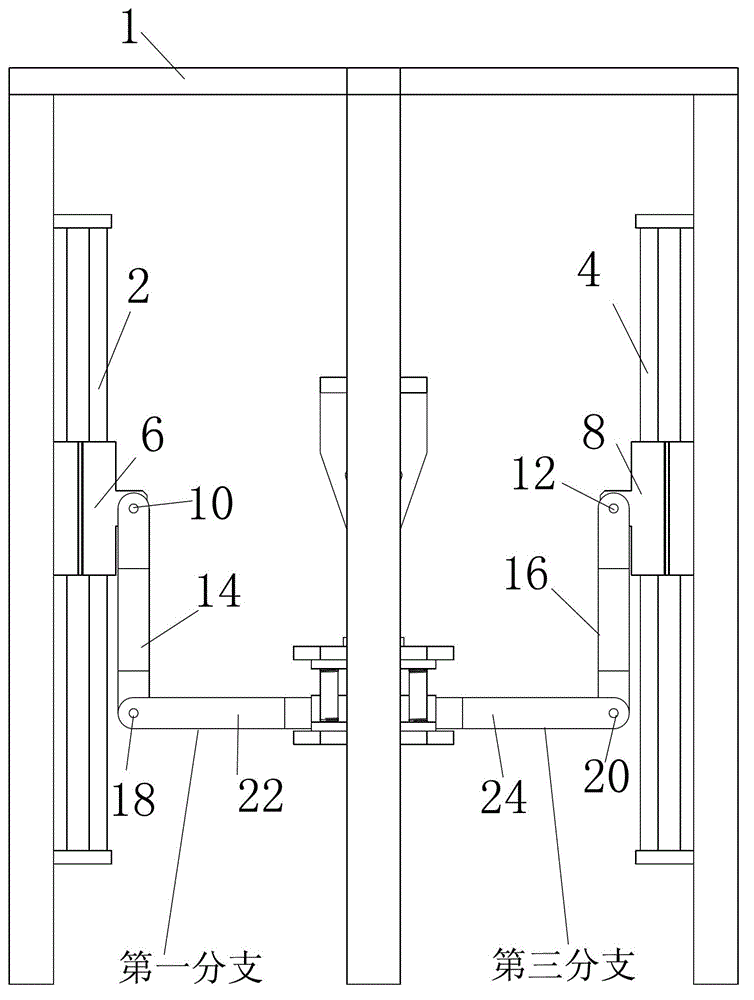
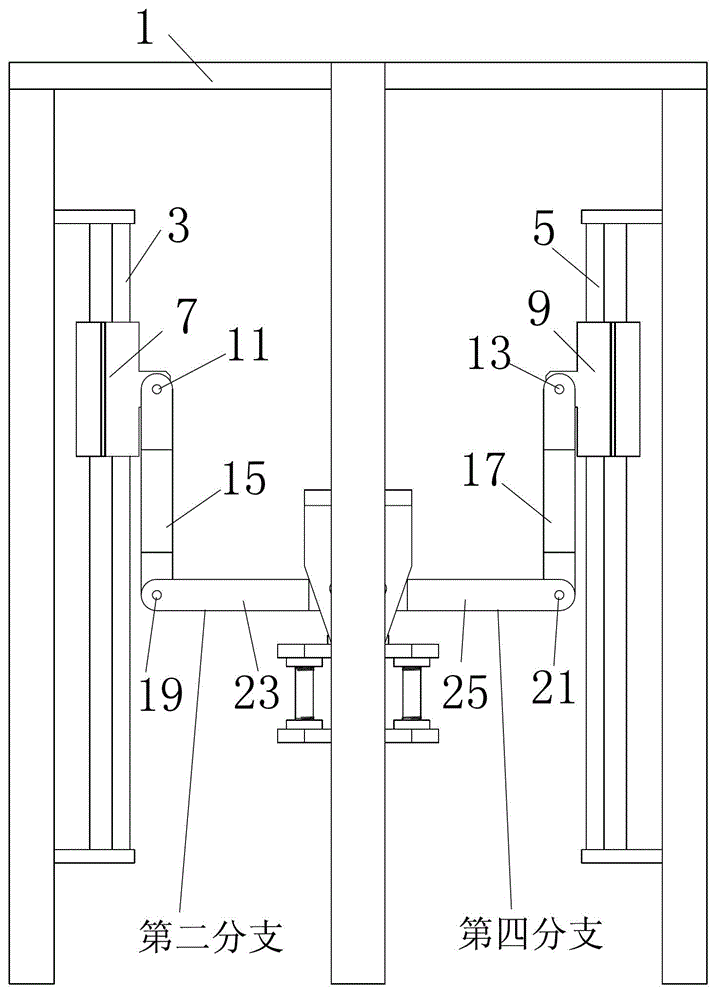
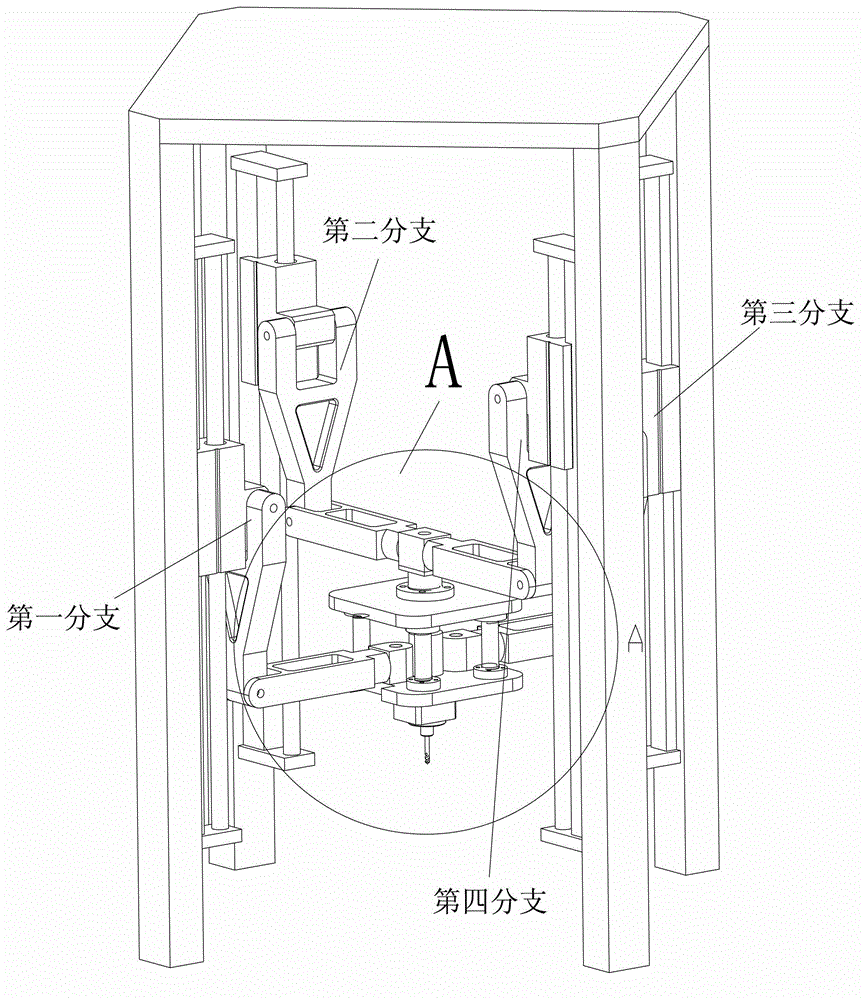
[0025] figure 1 with figure 2 As shown, the four branches of the mechanism are symmetrically distributed in pairs (the first branch, the second branch, the third branch and the fourth branch surround the circumference of the upper platform in a clockwise direction, or surround the uniform distribution in a counterclockwise direction. Cloth on the circumference of the upper platform). The guide rails and leading screws in the four branches are all installed on the frame, and their axes are all perpendicular to the ground. The first slide block 6 of the first branch is slidably matched with the guide rail, and is driven by the first branch lead screw 2 through a threaded structure (the slide block is shaped on a nut suitable for the thread of the lead screw; the same below), the first slide block 6 It is connected with the connecting rod 14 through the fir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More