

Advances In Visual-Inertial Simultaneous Localization And Mapping
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
VI-SLAM Background and Objectives
Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) represents a significant advancement in the field of robotic perception and navigation. The technology emerged from the convergence of computer vision and inertial sensing, with early foundations dating back to the early 2000s when researchers began exploring ways to enhance traditional vision-based SLAM systems with inertial measurements.
The evolution of VI-SLAM has been driven by the increasing demand for robust localization solutions in GPS-denied environments, particularly for applications such as autonomous vehicles, unmanned aerial vehicles (UAVs), augmented reality (AR), and mobile robotics. Traditional vision-only SLAM systems often struggled with rapid movements, feature-poor environments, and changing lighting conditions, while inertial-only systems suffered from drift over time.
VI-SLAM addresses these limitations by fusing complementary sensor data: cameras provide rich environmental information but are sensitive to lighting and require sufficient texture, while inertial measurement units (IMUs) offer high-frequency motion data that is robust to visual challenges but prone to integration drift. This sensor fusion creates a more reliable and accurate system for real-time mapping and localization.
The technical objectives of VI-SLAM research focus on several key areas: improving accuracy and robustness in challenging environments, reducing computational complexity for real-time operation on resource-constrained devices, enhancing long-term consistency through loop closure and map management, and developing more efficient initialization methods that enable quick system deployment.
Recent technological trends in VI-SLAM include the integration of deep learning approaches for feature extraction and matching, the development of tightly-coupled optimization frameworks that jointly process visual and inertial data, and the exploration of event-based cameras that offer advantages in high-dynamic range scenarios and fast motion.
The field has witnessed significant milestones, including the development of MSCKF (Multi-State Constraint Kalman Filter) by Mourikis and Roumeliotis in 2007, the introduction of OKVIS (Open Keyframe-based Visual-Inertial SLAM) by Leutenegger et al. in 2015, and the release of VINS-Mono by Qin et al. in 2018, which demonstrated state-of-the-art performance in various scenarios.
As VI-SLAM continues to mature, research is increasingly focused on creating systems that can operate in more diverse and challenging environments, with greater efficiency and reliability. The ultimate goal is to develop VI-SLAM solutions that can provide centimeter-level accuracy across extended operations while maintaining real-time performance on embedded platforms, thus enabling a new generation of autonomous systems capable of navigating complex, dynamic environments without external infrastructure.
The evolution of VI-SLAM has been driven by the increasing demand for robust localization solutions in GPS-denied environments, particularly for applications such as autonomous vehicles, unmanned aerial vehicles (UAVs), augmented reality (AR), and mobile robotics. Traditional vision-only SLAM systems often struggled with rapid movements, feature-poor environments, and changing lighting conditions, while inertial-only systems suffered from drift over time.
VI-SLAM addresses these limitations by fusing complementary sensor data: cameras provide rich environmental information but are sensitive to lighting and require sufficient texture, while inertial measurement units (IMUs) offer high-frequency motion data that is robust to visual challenges but prone to integration drift. This sensor fusion creates a more reliable and accurate system for real-time mapping and localization.
The technical objectives of VI-SLAM research focus on several key areas: improving accuracy and robustness in challenging environments, reducing computational complexity for real-time operation on resource-constrained devices, enhancing long-term consistency through loop closure and map management, and developing more efficient initialization methods that enable quick system deployment.
Recent technological trends in VI-SLAM include the integration of deep learning approaches for feature extraction and matching, the development of tightly-coupled optimization frameworks that jointly process visual and inertial data, and the exploration of event-based cameras that offer advantages in high-dynamic range scenarios and fast motion.
The field has witnessed significant milestones, including the development of MSCKF (Multi-State Constraint Kalman Filter) by Mourikis and Roumeliotis in 2007, the introduction of OKVIS (Open Keyframe-based Visual-Inertial SLAM) by Leutenegger et al. in 2015, and the release of VINS-Mono by Qin et al. in 2018, which demonstrated state-of-the-art performance in various scenarios.
As VI-SLAM continues to mature, research is increasingly focused on creating systems that can operate in more diverse and challenging environments, with greater efficiency and reliability. The ultimate goal is to develop VI-SLAM solutions that can provide centimeter-level accuracy across extended operations while maintaining real-time performance on embedded platforms, thus enabling a new generation of autonomous systems capable of navigating complex, dynamic environments without external infrastructure.
Market Applications and Demand Analysis
Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) technology has witnessed significant market growth across multiple sectors due to its ability to provide accurate positioning and mapping in environments where GPS signals are unreliable or unavailable. The global market for SLAM technologies, including VI-SLAM, is experiencing robust expansion with a projected market value exceeding $400 million by 2025, driven primarily by applications in robotics, augmented reality, and autonomous navigation systems.
The autonomous vehicle industry represents one of the largest market segments for VI-SLAM technology. Major automotive manufacturers and technology companies are investing heavily in this technology to enhance the perception systems of self-driving cars, particularly for urban environments where GPS signals can be compromised by tall buildings. The precision offered by VI-SLAM systems is critical for safe navigation and obstacle avoidance in these complex scenarios.
Mobile augmented reality applications constitute another rapidly growing market for VI-SLAM. Smartphone manufacturers are increasingly incorporating VI-SLAM capabilities into their devices to enable more immersive and spatially aware AR experiences. This trend is further accelerated by the development of AR glasses and headsets that rely on accurate spatial mapping to overlay digital content onto the physical world.
In the industrial sector, VI-SLAM is gaining traction for applications in warehouse automation and inventory management. Autonomous mobile robots equipped with VI-SLAM can navigate complex warehouse environments efficiently, reducing operational costs and improving productivity. The market demand in this segment is particularly strong as companies seek to optimize their logistics operations in response to the e-commerce boom.
The drone industry represents another significant market for VI-SLAM technology. Commercial drones used for inspection, surveying, and mapping benefit greatly from the ability to navigate precisely in GPS-denied environments such as indoor spaces, under bridges, or near tall structures. This capability expands the operational envelope of drones and enables new applications across industries including construction, infrastructure inspection, and emergency response.
Healthcare applications of VI-SLAM are emerging as a promising market segment, particularly in surgical navigation and hospital logistics. The technology enables precise tracking of surgical instruments and improved navigation during minimally invasive procedures. Additionally, autonomous mobile robots using VI-SLAM can efficiently transport supplies throughout hospital facilities, addressing labor shortages and improving operational efficiency.
The market demand for VI-SLAM is further driven by the miniaturization of sensors and increasing computational power of mobile devices, making the technology more accessible across various price points and application domains. As algorithms continue to improve and hardware costs decrease, we can expect accelerated adoption across both established and emerging market segments.
The autonomous vehicle industry represents one of the largest market segments for VI-SLAM technology. Major automotive manufacturers and technology companies are investing heavily in this technology to enhance the perception systems of self-driving cars, particularly for urban environments where GPS signals can be compromised by tall buildings. The precision offered by VI-SLAM systems is critical for safe navigation and obstacle avoidance in these complex scenarios.
Mobile augmented reality applications constitute another rapidly growing market for VI-SLAM. Smartphone manufacturers are increasingly incorporating VI-SLAM capabilities into their devices to enable more immersive and spatially aware AR experiences. This trend is further accelerated by the development of AR glasses and headsets that rely on accurate spatial mapping to overlay digital content onto the physical world.
In the industrial sector, VI-SLAM is gaining traction for applications in warehouse automation and inventory management. Autonomous mobile robots equipped with VI-SLAM can navigate complex warehouse environments efficiently, reducing operational costs and improving productivity. The market demand in this segment is particularly strong as companies seek to optimize their logistics operations in response to the e-commerce boom.
The drone industry represents another significant market for VI-SLAM technology. Commercial drones used for inspection, surveying, and mapping benefit greatly from the ability to navigate precisely in GPS-denied environments such as indoor spaces, under bridges, or near tall structures. This capability expands the operational envelope of drones and enables new applications across industries including construction, infrastructure inspection, and emergency response.
Healthcare applications of VI-SLAM are emerging as a promising market segment, particularly in surgical navigation and hospital logistics. The technology enables precise tracking of surgical instruments and improved navigation during minimally invasive procedures. Additionally, autonomous mobile robots using VI-SLAM can efficiently transport supplies throughout hospital facilities, addressing labor shortages and improving operational efficiency.
The market demand for VI-SLAM is further driven by the miniaturization of sensors and increasing computational power of mobile devices, making the technology more accessible across various price points and application domains. As algorithms continue to improve and hardware costs decrease, we can expect accelerated adoption across both established and emerging market segments.
Current VI-SLAM Technical Challenges
Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) systems face several significant technical challenges despite recent advancements. One of the primary obstacles remains the accurate fusion of visual and inertial data, particularly when dealing with varying motion dynamics. The temporal misalignment between camera frames and IMU measurements continues to pose difficulties for precise state estimation, especially in high-speed or unpredictable movement scenarios.
Scale ambiguity presents another persistent challenge in VI-SLAM implementations. While the integration of inertial measurements theoretically addresses this issue by providing metric scale information, practical systems still struggle with scale drift over extended operation periods. This drift becomes particularly problematic in large-scale environments or during prolonged navigation tasks where error accumulation becomes significant.
Environmental factors substantially impact VI-SLAM performance. Low-texture environments provide insufficient visual features for tracking, while dynamic objects in the scene violate the static world assumption fundamental to most SLAM algorithms. Similarly, varying lighting conditions can dramatically alter feature appearance, causing tracking failures. These environmental challenges often require specialized solutions that increase system complexity.
Computational efficiency remains a critical constraint, particularly for resource-limited platforms such as mobile devices, drones, or augmented reality headsets. The need to process high-frequency IMU data (typically 200-1000Hz) alongside visual information (30-60Hz) in real-time demands efficient algorithms and optimized implementations. This challenge becomes more pronounced as the complexity of environments increases or when long-term operation is required.
Loop closure detection and global consistency maintenance represent sophisticated technical hurdles. While visual loop closure techniques have matured, integrating inertial information into this process to improve robustness remains an active research area. Furthermore, efficiently managing the computational complexity of global optimization after loop closures continues to challenge system designers.
Initialization procedures for VI-SLAM systems remain problematic, particularly in determining the initial scale, velocity, and IMU biases. Current methods often require specific motion patterns or prior knowledge, limiting the system's usability in arbitrary deployment scenarios. Robust initialization that works across diverse conditions without user intervention represents an ongoing challenge.
Finally, the lack of standardized evaluation frameworks and benchmarks makes it difficult to objectively compare different VI-SLAM approaches. The diversity of hardware configurations, testing environments, and performance metrics complicates the assessment of algorithmic improvements, hindering progress in the field and technology transfer to commercial applications.
Scale ambiguity presents another persistent challenge in VI-SLAM implementations. While the integration of inertial measurements theoretically addresses this issue by providing metric scale information, practical systems still struggle with scale drift over extended operation periods. This drift becomes particularly problematic in large-scale environments or during prolonged navigation tasks where error accumulation becomes significant.
Environmental factors substantially impact VI-SLAM performance. Low-texture environments provide insufficient visual features for tracking, while dynamic objects in the scene violate the static world assumption fundamental to most SLAM algorithms. Similarly, varying lighting conditions can dramatically alter feature appearance, causing tracking failures. These environmental challenges often require specialized solutions that increase system complexity.
Computational efficiency remains a critical constraint, particularly for resource-limited platforms such as mobile devices, drones, or augmented reality headsets. The need to process high-frequency IMU data (typically 200-1000Hz) alongside visual information (30-60Hz) in real-time demands efficient algorithms and optimized implementations. This challenge becomes more pronounced as the complexity of environments increases or when long-term operation is required.
Loop closure detection and global consistency maintenance represent sophisticated technical hurdles. While visual loop closure techniques have matured, integrating inertial information into this process to improve robustness remains an active research area. Furthermore, efficiently managing the computational complexity of global optimization after loop closures continues to challenge system designers.
Initialization procedures for VI-SLAM systems remain problematic, particularly in determining the initial scale, velocity, and IMU biases. Current methods often require specific motion patterns or prior knowledge, limiting the system's usability in arbitrary deployment scenarios. Robust initialization that works across diverse conditions without user intervention represents an ongoing challenge.
Finally, the lack of standardized evaluation frameworks and benchmarks makes it difficult to objectively compare different VI-SLAM approaches. The diversity of hardware configurations, testing environments, and performance metrics complicates the assessment of algorithmic improvements, hindering progress in the field and technology transfer to commercial applications.
State-of-the-Art VI-SLAM Solutions
01 Sensor fusion techniques for improved VI-SLAM accuracy
Visual-Inertial SLAM systems can achieve higher localization and mapping accuracy through advanced sensor fusion techniques that optimally combine data from cameras and inertial measurement units (IMUs). These methods include tightly-coupled integration approaches, extended Kalman filters, and factor graph optimization that properly weight visual and inertial measurements based on their reliability. By effectively fusing complementary sensor data, these systems can compensate for the limitations of individual sensors, resulting in more robust performance across diverse environments and motion patterns.- Sensor fusion techniques for improved VI-SLAM accuracy: Visual-Inertial SLAM systems can achieve higher localization and mapping accuracy through advanced sensor fusion techniques that optimally combine data from cameras and inertial measurement units (IMUs). These methods typically involve sophisticated algorithms such as extended Kalman filters, factor graphs, or optimization-based approaches that account for the complementary nature of visual and inertial measurements. By effectively integrating the high-frequency motion data from IMUs with the rich spatial information from visual sensors, these systems can overcome limitations of each individual sensor type, resulting in more robust performance across varying environmental conditions.
- Feature extraction and tracking methods for enhanced mapping: Advanced feature extraction and tracking methods significantly impact the accuracy of VI-SLAM systems. These techniques involve identifying distinctive visual landmarks in the environment and tracking them across multiple frames to establish correspondences. By employing robust feature descriptors, outlier rejection mechanisms, and efficient matching algorithms, VI-SLAM systems can maintain consistent tracking even in challenging scenarios with varying lighting conditions or dynamic objects. The quality and reliability of these visual features directly influence the system's ability to accurately reconstruct the environment and determine the camera's position within it.
- Loop closure and global optimization for drift reduction: Loop closure detection and global optimization techniques are crucial for reducing accumulated drift in VI-SLAM systems. These methods identify when the system has returned to a previously visited location and use this information to correct the entire trajectory and map. By formulating the problem as a graph optimization where nodes represent poses and edges represent constraints from measurements, global consistency can be achieved. Advanced loop closure approaches incorporate appearance-based place recognition, geometric verification, and efficient optimization algorithms to maintain accuracy over extended operation periods, significantly improving the overall mapping quality.
- Real-time performance optimization techniques: Real-time performance optimization techniques enable VI-SLAM systems to maintain high accuracy while operating under computational constraints. These approaches include efficient algorithm implementations, parallel processing architectures, and selective processing of visual and inertial data. By carefully managing computational resources and employing techniques such as keyframe selection, local mapping, and multi-threading, VI-SLAM systems can achieve the necessary balance between accuracy and processing speed required for real-time applications in robotics, augmented reality, and autonomous navigation.
- Environmental adaptation and robustness strategies: Environmental adaptation and robustness strategies are essential for maintaining VI-SLAM accuracy across diverse operating conditions. These techniques include dynamic parameter adjustment based on scene characteristics, illumination invariant processing, and handling of challenging scenarios such as fast motion or feature-poor environments. By incorporating adaptive thresholds, multi-modal sensing, and learning-based approaches that can adjust to different environmental contexts, VI-SLAM systems can achieve consistent performance across a wide range of real-world conditions, significantly enhancing their practical utility and reliability.
02 Feature extraction and tracking algorithms for VI-SLAM
The accuracy of VI-SLAM systems heavily depends on robust feature extraction and tracking algorithms. Advanced techniques include deep learning-based feature detectors, descriptor matching methods, and optical flow tracking that can identify and track distinctive visual landmarks across frames even under challenging conditions like motion blur or illumination changes. These algorithms enable more reliable feature correspondence establishment, which is crucial for accurate camera pose estimation and 3D map reconstruction in dynamic and complex environments.Expand Specific Solutions03 Loop closure and global optimization methods
Loop closure detection and global optimization techniques significantly enhance VI-SLAM accuracy by correcting accumulated drift errors. These methods identify when the system revisits previously mapped areas and use this information to refine the entire trajectory and map. Advanced approaches include appearance-based place recognition, pose graph optimization, and bundle adjustment that globally minimize geometric errors. By effectively closing loops and redistributing errors throughout the trajectory, these techniques enable consistent mapping over extended operations and large-scale environments.Expand Specific Solutions04 Calibration and error modeling for VI-SLAM systems
Precise calibration and error modeling significantly improve VI-SLAM accuracy by accounting for systematic errors in sensor measurements. These techniques include methods for camera-IMU spatial and temporal calibration, bias estimation, and noise characterization. Advanced approaches model and compensate for various error sources such as rolling shutter effects, IMU drift, and lens distortion. By accurately characterizing and correcting these error sources, VI-SLAM systems can achieve higher precision in both localization and mapping tasks across different operational conditions.Expand Specific Solutions05 Real-time optimization and computational efficiency
Achieving high accuracy in VI-SLAM while maintaining real-time performance requires specialized optimization techniques and computational efficiency improvements. These include parallel processing architectures, keyframe selection strategies, and marginalization methods that reduce computational complexity without sacrificing accuracy. Some approaches employ sliding window optimization, efficient matrix factorization, and hardware acceleration to enable high-frequency state estimation. These techniques allow VI-SLAM systems to operate with high accuracy on resource-constrained platforms like mobile devices, drones, and augmented reality headsets.Expand Specific Solutions
Key Industry Players and Research Groups
Visual-Inertial Simultaneous Localization And Mapping (VI-SLAM) technology is currently in a growth phase, with the market expected to expand significantly due to increasing applications in robotics, AR/VR, and autonomous navigation. The global market is projected to reach several billion dollars by 2025, driven by demand for precise indoor positioning systems where GPS is unavailable. Technologically, VI-SLAM is maturing rapidly with companies at different development stages. Google, Meta, and iRobot lead with commercial implementations, while academic institutions like MIT, University of Michigan, and Zhejiang University contribute fundamental research advancements. Emerging players like Trifo and TRX Systems are developing specialized applications, while established corporations such as Samsung and Baidu are integrating VI-SLAM into broader product ecosystems, indicating the technology's transition from research to widespread commercial adoption.
iRobot Corp.
Technical Solution: iRobot has developed proprietary Visual-Inertial SLAM technology for their robotic vacuum cleaners and other home robots. Their vSLAM (Visual Simultaneous Localization and Mapping) system combines camera data with inertial sensors to create accurate maps of indoor environments. iRobot's approach utilizes a low-cost camera system that identifies visual landmarks in the home environment, while wheel encoders and IMU sensors track the robot's movement. Their implementation employs feature extraction algorithms to identify persistent visual features that serve as navigation landmarks[3]. The system builds a hierarchical map representation that includes both metric and topological information, allowing robots to understand spatial relationships between rooms and efficiently plan cleaning routes. iRobot's SLAM solution incorporates adaptive algorithms that can handle dynamic environments where furniture and objects may move between cleaning sessions. Their latest Roomba j7 models include enhanced object recognition capabilities integrated with the SLAM system to identify and avoid common obstacles like cords and pet waste.
Strengths: Highly optimized for consumer robotics applications; excellent performance with limited computational resources; robust operation in changing home environments; practical implementation focused on cleaning efficiency. Weaknesses: Specialized for indoor home environments rather than general-purpose applications; limited vertical mapping capabilities compared to some research-oriented systems.
Meta Platforms Technologies LLC
Technical Solution: Meta has developed sophisticated Visual-Inertial SLAM technology primarily for their augmented and virtual reality products. Their approach combines computer vision with inertial measurement data to create accurate spatial mapping and tracking. Meta's VI-SLAM system employs a multi-stage pipeline that begins with feature detection and tracking across video frames, followed by integration with IMU data for motion estimation. Their implementation uses sparse visual features combined with dense depth mapping to create detailed environmental reconstructions. Meta's system is particularly notable for its Oculus Insight tracking technology, which enables inside-out tracking without external sensors[2]. Their SLAM solution incorporates advanced loop closure detection to correct accumulated drift and maintain consistent mapping during extended use. Meta has also developed specialized hardware accelerators in their devices to optimize SLAM performance while minimizing power consumption, crucial for mobile XR applications.
Strengths: Exceptional performance in consumer XR devices; highly optimized for power efficiency; robust tracking in diverse lighting conditions; seamless integration with spatial computing applications. Weaknesses: Primarily focused on consumer applications rather than industrial or research use cases; proprietary implementation with limited academic publication of technical details.
Core Algorithms and Sensor Fusion Techniques
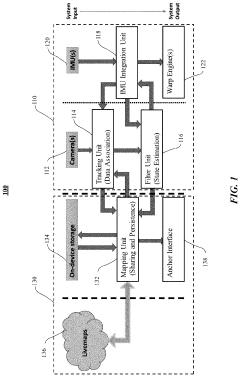
Localization and mapping utilizing visual odometry
PatentActiveUS20220122291A1
Innovation
- A self-sufficient visual inertial odometry (VIO)-based SLAM tracking system comprising a tracking engine and a mapping engine, where the tracking engine uses a tracking unit, IMU integration unit, and filter unit to determine device location and state, and the mapping engine performs global mapping at a lower frequency to conserve power.



Systems and Methods for Simultaneous Localization and Mapping Using Asynchronous Multi-View Cameras
PatentActiveUS20220137636A1
Innovation
- The implementation of a generalized multi-image device formulation that utilizes asynchronous image frames and a continuous-time motion model to estimate the trajectory of an autonomous vehicle, allowing for the generation of asynchronous multi-frames and refinement of three-dimensional map points, enabling accurate localization and mapping even in dynamic and unstructured environments.




Hardware Requirements and Limitations
Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) systems operate under specific hardware constraints that significantly impact their performance, deployment scope, and overall effectiveness. The selection of appropriate sensors represents a critical decision point, with camera specifications such as resolution, field of view, and frame rate directly influencing mapping accuracy and computational demands. Modern VI-SLAM implementations typically require cameras capable of at least 640x480 resolution operating at 30Hz, though higher specifications yield improved results at the cost of increased processing requirements.
Inertial Measurement Units (IMUs) constitute the second critical hardware component, with performance characteristics varying dramatically across price points. Consumer-grade IMUs found in smartphones exhibit significant drift and bias instability, necessitating sophisticated calibration and error compensation algorithms. In contrast, tactical-grade IMUs offer substantially improved performance but at significantly higher costs, creating important deployment trade-offs.
Processing hardware represents another fundamental limitation, with real-time VI-SLAM implementations demanding substantial computational resources. Edge devices with limited processing capabilities often require algorithm optimization or feature reduction to maintain acceptable performance. The emergence of specialized hardware accelerators, including Visual Processing Units (VPUs) and Neural Processing Units (NPUs), has begun addressing these constraints by enabling more efficient execution of vision algorithms.
Power consumption presents a particularly challenging constraint for mobile and autonomous platforms. High-performance VI-SLAM systems can rapidly deplete battery reserves, necessitating careful power management strategies or compromises in operational parameters. This limitation becomes especially pronounced in drone applications, where battery capacity directly impacts flight time and operational range.
Environmental factors introduce additional hardware considerations, with lighting conditions affecting camera performance and temperature variations influencing IMU calibration stability. Robust VI-SLAM implementations must incorporate hardware solutions that can withstand these environmental variations or include software compensation mechanisms.
Synchronization between visual and inertial sensors represents a subtle but critical hardware requirement. Timestamp misalignment between sensors can introduce significant errors in motion estimation. Advanced systems employ hardware-level synchronization mechanisms, though software-based approaches remain common in cost-sensitive applications despite their limitations.
The miniaturization trend in robotics and wearable computing has driven development of increasingly compact VI-SLAM hardware solutions, though physical size constraints often necessitate compromises in sensor quality or computational capabilities. This tension between form factor and performance continues to drive innovation in both hardware design and algorithm efficiency.
Inertial Measurement Units (IMUs) constitute the second critical hardware component, with performance characteristics varying dramatically across price points. Consumer-grade IMUs found in smartphones exhibit significant drift and bias instability, necessitating sophisticated calibration and error compensation algorithms. In contrast, tactical-grade IMUs offer substantially improved performance but at significantly higher costs, creating important deployment trade-offs.
Processing hardware represents another fundamental limitation, with real-time VI-SLAM implementations demanding substantial computational resources. Edge devices with limited processing capabilities often require algorithm optimization or feature reduction to maintain acceptable performance. The emergence of specialized hardware accelerators, including Visual Processing Units (VPUs) and Neural Processing Units (NPUs), has begun addressing these constraints by enabling more efficient execution of vision algorithms.
Power consumption presents a particularly challenging constraint for mobile and autonomous platforms. High-performance VI-SLAM systems can rapidly deplete battery reserves, necessitating careful power management strategies or compromises in operational parameters. This limitation becomes especially pronounced in drone applications, where battery capacity directly impacts flight time and operational range.
Environmental factors introduce additional hardware considerations, with lighting conditions affecting camera performance and temperature variations influencing IMU calibration stability. Robust VI-SLAM implementations must incorporate hardware solutions that can withstand these environmental variations or include software compensation mechanisms.
Synchronization between visual and inertial sensors represents a subtle but critical hardware requirement. Timestamp misalignment between sensors can introduce significant errors in motion estimation. Advanced systems employ hardware-level synchronization mechanisms, though software-based approaches remain common in cost-sensitive applications despite their limitations.
The miniaturization trend in robotics and wearable computing has driven development of increasingly compact VI-SLAM hardware solutions, though physical size constraints often necessitate compromises in sensor quality or computational capabilities. This tension between form factor and performance continues to drive innovation in both hardware design and algorithm efficiency.
Real-time Performance Benchmarking
Real-time performance benchmarking is critical for evaluating Visual-Inertial Simultaneous Localization and Mapping (VI-SLAM) systems in practical applications. Current benchmarking methodologies focus on several key performance metrics that determine system viability in resource-constrained environments such as mobile robots, drones, and augmented reality devices.
Processing time per frame serves as a fundamental metric, with state-of-the-art VI-SLAM systems achieving 20-40ms per frame on mid-range computing platforms. VINS-Mono demonstrates approximately 33ms per frame on an Intel i7 processor, while ORB-SLAM3 achieves similar performance with enhanced accuracy. These processing speeds enable real-time operation at 30Hz, meeting the minimum requirements for most robotic applications.
Memory consumption represents another crucial benchmark parameter. Modern VI-SLAM implementations typically require 100-500MB of RAM during operation, with significant variations based on map size and environmental complexity. Systems employing keyframe culling strategies, such as OKVIS and ROVIO, maintain more consistent memory profiles during extended operation compared to those that retain complete trajectory information.
CPU and GPU utilization metrics reveal important implementation differences. Pure CPU implementations like MSCKF typically utilize 1-2 cores at 60-80% capacity, while hybrid approaches like Kimera-VIO leverage GPU acceleration for feature extraction and matching, reducing CPU load to 30-40% while consuming approximately 20-30% of GPU resources on integrated graphics processors.
Power consumption benchmarks indicate that VI-SLAM systems require 2-5W on embedded platforms, with significant implications for battery-powered devices. OpenVINS demonstrates optimized power efficiency at approximately 2.3W on Jetson TX2 platforms, representing a 30% improvement over earlier implementations.
Initialization time varies substantially between systems, ranging from 0.5 to 3 seconds. Fast initialization is particularly important for applications requiring immediate localization capabilities. BASALT achieves initialization in approximately 0.7 seconds under favorable motion conditions, outperforming most competitors in this metric.
Standardized benchmark datasets including EuRoC, TUM-VI, and KITTI provide consistent evaluation environments, though real-world performance often diverges from laboratory results due to environmental factors and hardware variations. The recently established OpenVINS Benchmark Initiative aims to standardize testing methodologies across diverse hardware platforms, enabling more reliable cross-implementation comparisons.
Processing time per frame serves as a fundamental metric, with state-of-the-art VI-SLAM systems achieving 20-40ms per frame on mid-range computing platforms. VINS-Mono demonstrates approximately 33ms per frame on an Intel i7 processor, while ORB-SLAM3 achieves similar performance with enhanced accuracy. These processing speeds enable real-time operation at 30Hz, meeting the minimum requirements for most robotic applications.
Memory consumption represents another crucial benchmark parameter. Modern VI-SLAM implementations typically require 100-500MB of RAM during operation, with significant variations based on map size and environmental complexity. Systems employing keyframe culling strategies, such as OKVIS and ROVIO, maintain more consistent memory profiles during extended operation compared to those that retain complete trajectory information.
CPU and GPU utilization metrics reveal important implementation differences. Pure CPU implementations like MSCKF typically utilize 1-2 cores at 60-80% capacity, while hybrid approaches like Kimera-VIO leverage GPU acceleration for feature extraction and matching, reducing CPU load to 30-40% while consuming approximately 20-30% of GPU resources on integrated graphics processors.
Power consumption benchmarks indicate that VI-SLAM systems require 2-5W on embedded platforms, with significant implications for battery-powered devices. OpenVINS demonstrates optimized power efficiency at approximately 2.3W on Jetson TX2 platforms, representing a 30% improvement over earlier implementations.
Initialization time varies substantially between systems, ranging from 0.5 to 3 seconds. Fast initialization is particularly important for applications requiring immediate localization capabilities. BASALT achieves initialization in approximately 0.7 seconds under favorable motion conditions, outperforming most competitors in this metric.
Standardized benchmark datasets including EuRoC, TUM-VI, and KITTI provide consistent evaluation environments, though real-world performance often diverges from laboratory results due to environmental factors and hardware variations. The recently established OpenVINS Benchmark Initiative aims to standardize testing methodologies across diverse hardware platforms, enabling more reliable cross-implementation comparisons.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!