

Simultaneous Localization And Mapping In Military Robotics
SEP 5, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Military SLAM Technology Background and Objectives
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly since its conceptual inception in the 1980s, with military applications emerging as a critical domain for its deployment. The technology fundamentally addresses the dual challenge of determining a robot's position within an unknown environment while simultaneously constructing a map of that environment. In military contexts, this capability has transformed from an experimental concept to an essential component of autonomous systems operating in contested or hostile territories.
The evolution of military SLAM has been accelerated by advancements in sensor technology, computational processing power, and algorithmic innovations. Early implementations relied heavily on laser range finders and sonar, while contemporary systems integrate sophisticated sensor fusion approaches incorporating LiDAR, radar, visual cameras, inertial measurement units, and GPS when available. This multi-modal sensing capability has become particularly crucial for military applications where environmental conditions are unpredictable and often degraded.
Military SLAM development has been driven by specific operational requirements that distinguish it from civilian applications. These include resilience to GPS-denied environments, operation in visually challenging conditions (smoke, dust, low-light), resistance to adversarial interference, and the ability to function despite sensor damage or failure. The technology has progressed from basic mapping capabilities to sophisticated real-time 3D environmental reconstruction with semantic understanding of battlefield elements.
The primary technical objectives for military SLAM development center around enhancing robustness, accuracy, and operational security. Achieving reliable performance in extreme conditions remains a paramount goal, as military robots must navigate complex terrain ranging from urban environments to subterranean structures and dense vegetation. Minimizing computational requirements while maintaining performance is another critical objective, particularly for smaller unmanned systems with limited power and processing capabilities.
Looking forward, military SLAM technology aims to achieve greater autonomy in collaborative multi-robot operations, enabling coordinated mapping and reconnaissance missions without constant human supervision. Enhanced semantic understanding represents another frontier, allowing systems to automatically identify tactically relevant features such as potential threats, cover positions, or strategic choke points. Additionally, there is significant focus on developing SLAM algorithms that can operate effectively despite deliberate jamming, spoofing, or deception tactics employed by adversaries.
The convergence of SLAM with other emerging technologies, particularly AI-driven decision making and edge computing, points toward increasingly capable autonomous military systems that can execute complex missions in denied environments with minimal human intervention. This trajectory aligns with broader military modernization strategies emphasizing unmanned systems as force multipliers in future conflicts.
The evolution of military SLAM has been accelerated by advancements in sensor technology, computational processing power, and algorithmic innovations. Early implementations relied heavily on laser range finders and sonar, while contemporary systems integrate sophisticated sensor fusion approaches incorporating LiDAR, radar, visual cameras, inertial measurement units, and GPS when available. This multi-modal sensing capability has become particularly crucial for military applications where environmental conditions are unpredictable and often degraded.
Military SLAM development has been driven by specific operational requirements that distinguish it from civilian applications. These include resilience to GPS-denied environments, operation in visually challenging conditions (smoke, dust, low-light), resistance to adversarial interference, and the ability to function despite sensor damage or failure. The technology has progressed from basic mapping capabilities to sophisticated real-time 3D environmental reconstruction with semantic understanding of battlefield elements.
The primary technical objectives for military SLAM development center around enhancing robustness, accuracy, and operational security. Achieving reliable performance in extreme conditions remains a paramount goal, as military robots must navigate complex terrain ranging from urban environments to subterranean structures and dense vegetation. Minimizing computational requirements while maintaining performance is another critical objective, particularly for smaller unmanned systems with limited power and processing capabilities.
Looking forward, military SLAM technology aims to achieve greater autonomy in collaborative multi-robot operations, enabling coordinated mapping and reconnaissance missions without constant human supervision. Enhanced semantic understanding represents another frontier, allowing systems to automatically identify tactically relevant features such as potential threats, cover positions, or strategic choke points. Additionally, there is significant focus on developing SLAM algorithms that can operate effectively despite deliberate jamming, spoofing, or deception tactics employed by adversaries.
The convergence of SLAM with other emerging technologies, particularly AI-driven decision making and edge computing, points toward increasingly capable autonomous military systems that can execute complex missions in denied environments with minimal human intervention. This trajectory aligns with broader military modernization strategies emphasizing unmanned systems as force multipliers in future conflicts.
Battlefield Applications and Demand Analysis
The military sector has witnessed a significant surge in demand for autonomous robotic systems equipped with Simultaneous Localization and Mapping (SLAM) capabilities. These technologies are revolutionizing battlefield operations by enabling unmanned systems to navigate complex, dynamic, and hostile environments without continuous human intervention or pre-existing maps.
In urban warfare scenarios, SLAM-enabled military robots provide critical reconnaissance capabilities, allowing forces to explore buildings, tunnels, and confined spaces without risking personnel. The U.S. Department of Defense has identified urban combat as a priority area, with an estimated 70% of future conflicts expected to occur in densely populated urban environments where traditional GPS navigation is unreliable.
Explosive Ordnance Disposal (EOD) represents another high-demand application area. SLAM-equipped robots can autonomously navigate to suspected explosive devices, create detailed environmental maps, and provide operators with crucial situational awareness while maintaining a safe distance. The global military EOD robot market is expanding rapidly as asymmetric warfare and improvised explosive devices remain persistent threats.
Battlefield logistics and supply operations benefit substantially from SLAM technology. Autonomous resupply vehicles can navigate through contested terrain, avoiding obstacles and threats while delivering critical supplies to forward operating bases or troops in combat. This capability addresses the "last mile" delivery challenge that often presents the highest risk to personnel in combat zones.
Intelligence, Surveillance, and Reconnaissance (ISR) missions represent perhaps the most substantial demand driver for military SLAM applications. Autonomous drones and ground vehicles equipped with advanced SLAM systems can create detailed maps of enemy territory, identify changes in the environment that might indicate threats, and provide commanders with enhanced situational awareness without risking human assets.
The demand for ruggedized SLAM systems capable of operating in GPS-denied environments continues to grow exponentially. Military requirements specify systems that can function effectively despite electronic warfare countermeasures, extreme weather conditions, and deliberate attempts to disrupt navigation capabilities. This has led to increased investment in multi-modal SLAM systems that integrate visual, LiDAR, radar, and inertial navigation technologies.
Cross-domain operations involving air, ground, and maritime autonomous systems create additional demand for interoperable SLAM technologies that can share environmental mapping data across platforms. This collaborative mapping capability enables more effective joint operations and provides redundancy in contested environments where individual systems may be compromised.
In urban warfare scenarios, SLAM-enabled military robots provide critical reconnaissance capabilities, allowing forces to explore buildings, tunnels, and confined spaces without risking personnel. The U.S. Department of Defense has identified urban combat as a priority area, with an estimated 70% of future conflicts expected to occur in densely populated urban environments where traditional GPS navigation is unreliable.
Explosive Ordnance Disposal (EOD) represents another high-demand application area. SLAM-equipped robots can autonomously navigate to suspected explosive devices, create detailed environmental maps, and provide operators with crucial situational awareness while maintaining a safe distance. The global military EOD robot market is expanding rapidly as asymmetric warfare and improvised explosive devices remain persistent threats.
Battlefield logistics and supply operations benefit substantially from SLAM technology. Autonomous resupply vehicles can navigate through contested terrain, avoiding obstacles and threats while delivering critical supplies to forward operating bases or troops in combat. This capability addresses the "last mile" delivery challenge that often presents the highest risk to personnel in combat zones.
Intelligence, Surveillance, and Reconnaissance (ISR) missions represent perhaps the most substantial demand driver for military SLAM applications. Autonomous drones and ground vehicles equipped with advanced SLAM systems can create detailed maps of enemy territory, identify changes in the environment that might indicate threats, and provide commanders with enhanced situational awareness without risking human assets.
The demand for ruggedized SLAM systems capable of operating in GPS-denied environments continues to grow exponentially. Military requirements specify systems that can function effectively despite electronic warfare countermeasures, extreme weather conditions, and deliberate attempts to disrupt navigation capabilities. This has led to increased investment in multi-modal SLAM systems that integrate visual, LiDAR, radar, and inertial navigation technologies.
Cross-domain operations involving air, ground, and maritime autonomous systems create additional demand for interoperable SLAM technologies that can share environmental mapping data across platforms. This collaborative mapping capability enables more effective joint operations and provides redundancy in contested environments where individual systems may be compromised.
SLAM Technical Challenges in Military Environments
SLAM technology in military environments faces unique challenges that significantly exceed those encountered in civilian applications. The dynamic and unpredictable nature of military operations creates substantial obstacles for reliable mapping and localization systems. These environments frequently contain rapidly changing elements, including moving objects, temporary structures, and deliberately altered landscapes that can render pre-existing maps obsolete within minutes.
Signal interference presents another critical challenge, as military scenarios often involve electronic warfare components designed to disrupt communication and sensing capabilities. GPS denial or spoofing is commonplace in contested environments, forcing SLAM systems to operate without reliable external positioning references. Additionally, adversarial forces may deliberately deploy countermeasures specifically designed to confuse or deceive autonomous navigation systems.
The extreme physical conditions characteristic of military operations further complicate SLAM implementation. Systems must function reliably across diverse terrains ranging from urban environments with complex vertical structures to remote wilderness areas with minimal distinguishing features. Weather conditions including dust storms, heavy precipitation, and extreme temperatures can severely degrade sensor performance, while smoke, fog, and intentional obscurants directly interfere with visual and LiDAR-based mapping technologies.
Military SLAM systems must also contend with computational constraints unique to field operations. Processing capabilities are limited by power availability, heat dissipation requirements, and the need for compact, ruggedized hardware. These limitations restrict the complexity of algorithms that can be deployed in real-time applications, forcing difficult trade-offs between accuracy, speed, and resource utilization.
Security considerations add another layer of complexity, as SLAM data in military contexts contains sensitive information about operational environments and capabilities. Systems must incorporate robust encryption and anti-tampering measures while maintaining operational effectiveness. The risk of captured systems being reverse-engineered necessitates fail-safe mechanisms that can securely erase or corrupt stored environmental data.
Perhaps most challenging is the requirement for military SLAM systems to operate with minimal prior environmental knowledge. Unlike civilian applications where environments can be pre-mapped or contain standardized features, military robots must often enter completely unknown territories with potentially hostile elements. This necessitates adaptive algorithms capable of rapidly building reliable environmental models while simultaneously using these incomplete models for navigation.
The integration of SLAM with other military systems presents interoperability challenges, requiring standardized data formats and communication protocols that can function across diverse platforms while maintaining security and reliability in contested electromagnetic environments.
Signal interference presents another critical challenge, as military scenarios often involve electronic warfare components designed to disrupt communication and sensing capabilities. GPS denial or spoofing is commonplace in contested environments, forcing SLAM systems to operate without reliable external positioning references. Additionally, adversarial forces may deliberately deploy countermeasures specifically designed to confuse or deceive autonomous navigation systems.
The extreme physical conditions characteristic of military operations further complicate SLAM implementation. Systems must function reliably across diverse terrains ranging from urban environments with complex vertical structures to remote wilderness areas with minimal distinguishing features. Weather conditions including dust storms, heavy precipitation, and extreme temperatures can severely degrade sensor performance, while smoke, fog, and intentional obscurants directly interfere with visual and LiDAR-based mapping technologies.
Military SLAM systems must also contend with computational constraints unique to field operations. Processing capabilities are limited by power availability, heat dissipation requirements, and the need for compact, ruggedized hardware. These limitations restrict the complexity of algorithms that can be deployed in real-time applications, forcing difficult trade-offs between accuracy, speed, and resource utilization.
Security considerations add another layer of complexity, as SLAM data in military contexts contains sensitive information about operational environments and capabilities. Systems must incorporate robust encryption and anti-tampering measures while maintaining operational effectiveness. The risk of captured systems being reverse-engineered necessitates fail-safe mechanisms that can securely erase or corrupt stored environmental data.
Perhaps most challenging is the requirement for military SLAM systems to operate with minimal prior environmental knowledge. Unlike civilian applications where environments can be pre-mapped or contain standardized features, military robots must often enter completely unknown territories with potentially hostile elements. This necessitates adaptive algorithms capable of rapidly building reliable environmental models while simultaneously using these incomplete models for navigation.
The integration of SLAM with other military systems presents interoperability challenges, requiring standardized data formats and communication protocols that can function across diverse platforms while maintaining security and reliability in contested electromagnetic environments.
Current Military-Grade SLAM Implementation Approaches
01 Visual SLAM techniques for navigation and mapping
Visual SLAM systems use camera data to simultaneously build maps of unknown environments while tracking the position of the device within that environment. These systems process visual features from images to create 3D representations of surroundings, enabling autonomous navigation. Advanced visual SLAM implementations incorporate feature detection, tracking algorithms, and loop closure techniques to improve accuracy and reduce drift over time.- Visual SLAM techniques for environment mapping: Visual SLAM techniques use camera data to simultaneously map an environment and locate a device within it. These methods rely on image processing algorithms to identify features, track movement, and build 3D representations of surroundings. Visual SLAM is particularly useful in applications where traditional sensors like GPS are unavailable or unreliable, such as indoor environments or autonomous navigation systems.
- Sensor fusion approaches for improved SLAM accuracy: Sensor fusion combines data from multiple sensors (cameras, LiDAR, IMU, etc.) to enhance SLAM performance. By integrating complementary sensor information, these approaches can overcome limitations of single-sensor systems, providing more robust localization and mapping in challenging environments. Sensor fusion techniques often employ probabilistic methods like Kalman filters or particle filters to optimally combine data streams with different characteristics and error profiles.
- Machine learning and AI-enhanced SLAM systems: Machine learning and artificial intelligence techniques are increasingly being integrated into SLAM systems to improve performance. These approaches use neural networks and other AI methods to enhance feature detection, object recognition, and scene understanding. ML-enhanced SLAM can better handle dynamic environments, changing lighting conditions, and complex scenes by learning from data rather than relying solely on hand-crafted algorithms.
- Real-time SLAM for autonomous navigation and robotics: Real-time SLAM implementations focus on efficient algorithms that can process sensor data and update maps with minimal latency. These systems are critical for autonomous vehicles, drones, and mobile robots that need to make navigation decisions quickly. Techniques include optimization methods for fast loop closure, efficient data structures for map representation, and parallel processing approaches that leverage specialized hardware like GPUs.
- SLAM for augmented reality and mixed reality applications: SLAM technology enables augmented reality and mixed reality experiences by accurately tracking device position and mapping the physical environment. These implementations often prioritize user experience factors like low latency and power efficiency while maintaining sufficient accuracy for convincing AR overlays. Special considerations include handling rapid camera movements, operating on resource-constrained mobile devices, and creating persistent maps that allow for shared AR experiences across multiple sessions.
02 Sensor fusion approaches for robust SLAM
Sensor fusion combines data from multiple sensors such as cameras, LiDAR, IMUs, and depth sensors to enhance SLAM performance. By integrating complementary sensor information, these systems achieve greater accuracy and reliability across varying environmental conditions. Sensor fusion techniques help overcome limitations of individual sensors, providing robust localization and mapping capabilities even in challenging scenarios like low-light conditions or featureless environments.Expand Specific Solutions03 Machine learning and AI-enhanced SLAM
Machine learning and artificial intelligence techniques are increasingly integrated into SLAM systems to improve performance. Neural networks can be trained to recognize environments, predict motion, and enhance feature detection. These AI-enhanced approaches enable more efficient processing of sensor data, better handling of dynamic objects, and improved mapping accuracy. Deep learning models help SLAM systems adapt to new environments and generalize across different scenarios.Expand Specific Solutions04 SLAM for augmented and virtual reality applications
SLAM technology is crucial for augmented and virtual reality systems, enabling digital content to be accurately positioned within real-world environments. These implementations focus on real-time performance, low latency, and precise tracking to create immersive experiences. AR/VR SLAM systems often operate under strict computational constraints while maintaining high accuracy to ensure seamless integration between virtual elements and physical surroundings.Expand Specific Solutions05 SLAM optimization techniques for resource-constrained devices
Optimization techniques for SLAM focus on reducing computational requirements while maintaining accuracy, making the technology viable for mobile and embedded devices. These approaches include efficient algorithms, map compression methods, and selective processing of sensor data. Optimized SLAM implementations balance performance with power consumption, enabling deployment on smartphones, drones, and other resource-limited platforms while still providing reliable localization and mapping capabilities.Expand Specific Solutions
Key Military Robotics and SLAM Solution Providers
The SLAM technology in military robotics is currently in a growth phase, with the market expected to expand significantly due to increasing defense modernization initiatives. The global market size for military robotics SLAM applications is projected to reach several billion dollars by 2025, driven by autonomous navigation requirements in unmanned ground vehicles and reconnaissance drones. Technologically, the field shows varying maturity levels across players. Industry leaders like Samsung Electronics, iRobot, and Mitsubishi Electric have developed advanced proprietary SLAM algorithms with robust performance in challenging environments. Meanwhile, companies like Aurora Operations and Intel are focusing on integrating SLAM with AI for enhanced situational awareness, while defense-oriented firms such as Terabee and Commissariat à l'énergie atomique are developing specialized military-grade implementations with enhanced security features.
iRobot Corp.
Technical Solution: iRobot's military SLAM technology integrates visual-inertial odometry with multi-sensor fusion algorithms specifically designed for challenging battlefield environments. Their vSLAM (visual Simultaneous Localization and Mapping) system combines RGB-D cameras with proprietary feature extraction algorithms to create accurate 3D maps even in GPS-denied environments[1]. The company's PackBot and FirstLook military robots utilize this technology to navigate through complex urban warfare scenarios, debris fields, and building interiors while maintaining positional awareness. iRobot's approach emphasizes robust loop closure detection that can handle dynamic obstacles and environmental changes common in combat zones[3]. Their systems employ distributed computing architecture that allows for real-time map updates across multiple connected robotic platforms, enabling coordinated reconnaissance and tactical operations.
Strengths: Exceptional performance in GPS-denied environments; robust operation in dynamic and unpredictable battlefield conditions; proven deployment history with military customers. Weaknesses: Higher power consumption compared to simpler navigation systems; requires significant computational resources; performance can degrade in extremely dusty or smoke-filled environments.
Mitsubishi Electric Corp.
Technical Solution: Mitsubishi Electric has developed specialized SLAM technology for military robotics that builds upon their industrial automation expertise. Their military SLAM solution integrates multiple sensing modalities including millimeter-wave radar, thermal imaging, and conventional LiDAR to create comprehensive environmental maps that function across diverse battlefield conditions[7]. Mitsubishi's approach emphasizes resilience to environmental interference, with their systems capable of maintaining accurate positioning even when subjected to smoke, dust, electromagnetic interference, or active jamming. Their technology employs a distributed processing architecture that allows for computational load balancing across multiple nodes, enhancing system survivability if individual components are damaged[8]. Particularly notable is Mitsubishi's implementation of terrain classification algorithms that can identify potential hazards such as unstable surfaces, concealed obstacles, or areas likely to contain improvised explosive devices. The system incorporates advanced path planning that can optimize routes based on mission parameters including stealth requirements, time constraints, and risk assessment.
Strengths: Exceptional performance in adverse environmental conditions; robust against electronic warfare measures; sophisticated terrain analysis enhances mission safety. Weaknesses: Larger physical footprint than some competing systems; higher initial cost; requires specialized maintenance and calibration procedures.
Critical Patents and Algorithms in Military SLAM
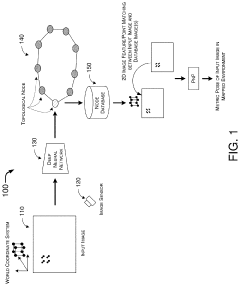
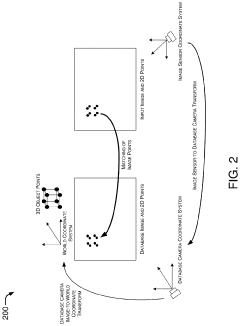
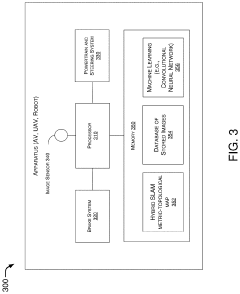
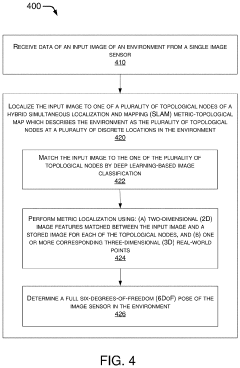
Hybrid Metric-Topological Camera-Based Localization
PatentActiveUS20210082145A1
Innovation
- A hybrid SLAM approach using stereo vision or depth sensors for initial mapping and a single camera or image sensor for localization, employing deep learning-based image classification and geometric PnP techniques to create a hybrid metric-topological map that is continuously updated, reducing memory requirements and costs by using a single camera instead of LIDAR.
System and method for probabilistic multi-robot slam
PatentWO2021065122A1
Innovation
- Robots exchange particles instead of raw measurements, using probabilistic sampling and pairing to reduce computational complexity while ensuring Bayesian inference guarantees, allowing for efficient communication and processing with low-power transceivers and decentralized computation.




Security and Jamming Resistance in Military SLAM
Military SLAM systems face unique security challenges that civilian applications rarely encounter. In combat environments, adversaries actively attempt to disrupt or compromise autonomous systems through various electronic warfare techniques. Signal jamming represents one of the most prevalent threats, where enemies broadcast interference on frequencies used by SLAM sensors, particularly affecting GPS, radio communications, and certain LiDAR wavelengths. This deliberate interference can cause catastrophic navigation failures or enable enemy forces to manipulate a robot's perceived environment.
Advanced military SLAM implementations incorporate multi-layered security approaches to counter these threats. Frequency-hopping techniques allow sensors to rapidly switch between different frequency bands, making jamming attempts significantly more difficult. Signal encryption protects data transmission between distributed SLAM systems, preventing interception or manipulation of mapping data. Additionally, redundant sensing modalities ensure that if one sensor type is compromised, others can maintain operational capability.
Sensor fusion algorithms specifically designed for contested environments can detect anomalous inputs that might indicate jamming attempts. These systems compare data across multiple sensor types and reject outliers that don't align with the consensus reality. For instance, if GPS suddenly reports dramatic position changes while visual odometry indicates minimal movement, the system can identify potential GPS spoofing.
Physical hardening of SLAM hardware provides another defense layer. Military-grade systems utilize electromagnetic shielding, radiation-hardened components, and tamper-evident enclosures to protect against both electronic and physical attacks. Some advanced platforms incorporate Faraday cage principles to shield sensitive electronics from electromagnetic pulse (EMP) attacks that could otherwise disable navigation systems.
Recent innovations include cognitive jamming resistance, where machine learning algorithms continuously adapt to recognize and filter out jamming patterns in real-time. These systems build libraries of known interference signatures and can rapidly identify novel jamming techniques. Some military contractors have developed SLAM systems capable of operating in GPS-denied environments for extended periods by relying entirely on passive sensors that are inherently resistant to jamming.
The development of quantum sensors represents the cutting edge of jamming-resistant SLAM technology. These sensors exploit quantum mechanical properties to achieve unprecedented precision while being fundamentally immune to conventional jamming techniques. Though still experimental, quantum-based inertial measurement units and magnetometers show promise for next-generation military robotics operating in heavily contested electromagnetic environments.
Advanced military SLAM implementations incorporate multi-layered security approaches to counter these threats. Frequency-hopping techniques allow sensors to rapidly switch between different frequency bands, making jamming attempts significantly more difficult. Signal encryption protects data transmission between distributed SLAM systems, preventing interception or manipulation of mapping data. Additionally, redundant sensing modalities ensure that if one sensor type is compromised, others can maintain operational capability.
Sensor fusion algorithms specifically designed for contested environments can detect anomalous inputs that might indicate jamming attempts. These systems compare data across multiple sensor types and reject outliers that don't align with the consensus reality. For instance, if GPS suddenly reports dramatic position changes while visual odometry indicates minimal movement, the system can identify potential GPS spoofing.
Physical hardening of SLAM hardware provides another defense layer. Military-grade systems utilize electromagnetic shielding, radiation-hardened components, and tamper-evident enclosures to protect against both electronic and physical attacks. Some advanced platforms incorporate Faraday cage principles to shield sensitive electronics from electromagnetic pulse (EMP) attacks that could otherwise disable navigation systems.
Recent innovations include cognitive jamming resistance, where machine learning algorithms continuously adapt to recognize and filter out jamming patterns in real-time. These systems build libraries of known interference signatures and can rapidly identify novel jamming techniques. Some military contractors have developed SLAM systems capable of operating in GPS-denied environments for extended periods by relying entirely on passive sensors that are inherently resistant to jamming.
The development of quantum sensors represents the cutting edge of jamming-resistant SLAM technology. These sensors exploit quantum mechanical properties to achieve unprecedented precision while being fundamentally immune to conventional jamming techniques. Though still experimental, quantum-based inertial measurement units and magnetometers show promise for next-generation military robotics operating in heavily contested electromagnetic environments.
Interoperability Standards for Multi-Robot SLAM Systems
Interoperability standards for multi-robot SLAM systems in military environments have become increasingly critical as defense forces deploy heterogeneous robotic teams for reconnaissance and tactical operations. These standards establish common protocols for data exchange, coordinate systems, map representation, and communication interfaces that enable seamless integration between different robotic platforms performing simultaneous localization and mapping tasks.
The IEEE RAS Standard P1873 for Robot Map Data Representation has emerged as a foundational framework, providing standardized formats for environmental map sharing between military robotic systems from different manufacturers. This standard addresses critical requirements for military operations, including secure data transmission protocols and encryption methods that protect sensitive mapping information in contested environments.
NATO's Standardization Agreement (STANAG) 4586 complements these efforts by defining unmanned vehicle control system architectures, incorporating provisions for SLAM data interoperability across coalition forces. These standards enable allied nations to deploy mixed robotic teams that can effectively build collaborative environmental maps while maintaining operational security.
Key interoperability components include standardized coordinate reference systems that allow precise alignment of map fragments generated by different robots, particularly important in GPS-denied military environments. The adoption of common semantic labeling conventions for terrain features, obstacles, and potential threats ensures consistent situational awareness across human-machine interfaces.
Communication middleware standards like DDS (Data Distribution Service) and ROS-Military variants provide secure, real-time data exchange frameworks optimized for bandwidth-constrained tactical networks. These systems implement quality-of-service parameters that prioritize critical mapping data during dynamic military operations while managing network congestion.
Recent advancements include the development of compressed map representation formats that reduce bandwidth requirements for transmitting 3D point clouds and occupancy grids between robots operating in communications-restricted environments. Edge computing standards define how processing tasks should be distributed between field robots and command centers, optimizing computational resources during multi-robot SLAM operations.
Validation and verification protocols establish methods for testing interoperability compliance, ensuring that different robotic systems can effectively share mapping data under simulated battlefield conditions. These test procedures verify map alignment accuracy, data transfer reliability, and system resilience against communication disruptions or cyber attacks.
The ongoing development of these standards represents a collaborative effort between defense agencies, industry partners, and research institutions to create a unified ecosystem for multi-robot SLAM systems that can operate effectively in complex military scenarios while maintaining the flexibility to incorporate emerging technologies.
The IEEE RAS Standard P1873 for Robot Map Data Representation has emerged as a foundational framework, providing standardized formats for environmental map sharing between military robotic systems from different manufacturers. This standard addresses critical requirements for military operations, including secure data transmission protocols and encryption methods that protect sensitive mapping information in contested environments.
NATO's Standardization Agreement (STANAG) 4586 complements these efforts by defining unmanned vehicle control system architectures, incorporating provisions for SLAM data interoperability across coalition forces. These standards enable allied nations to deploy mixed robotic teams that can effectively build collaborative environmental maps while maintaining operational security.
Key interoperability components include standardized coordinate reference systems that allow precise alignment of map fragments generated by different robots, particularly important in GPS-denied military environments. The adoption of common semantic labeling conventions for terrain features, obstacles, and potential threats ensures consistent situational awareness across human-machine interfaces.
Communication middleware standards like DDS (Data Distribution Service) and ROS-Military variants provide secure, real-time data exchange frameworks optimized for bandwidth-constrained tactical networks. These systems implement quality-of-service parameters that prioritize critical mapping data during dynamic military operations while managing network congestion.
Recent advancements include the development of compressed map representation formats that reduce bandwidth requirements for transmitting 3D point clouds and occupancy grids between robots operating in communications-restricted environments. Edge computing standards define how processing tasks should be distributed between field robots and command centers, optimizing computational resources during multi-robot SLAM operations.
Validation and verification protocols establish methods for testing interoperability compliance, ensuring that different robotic systems can effectively share mapping data under simulated battlefield conditions. These test procedures verify map alignment accuracy, data transfer reliability, and system resilience against communication disruptions or cyber attacks.
The ongoing development of these standards represents a collaborative effort between defense agencies, industry partners, and research institutions to create a unified ecosystem for multi-robot SLAM systems that can operate effectively in complex military scenarios while maintaining the flexibility to incorporate emerging technologies.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!