

SLAM Algorithms In Multi-Agent Robotics Coordination
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Technology Evolution and Objectives
Simultaneous Localization and Mapping (SLAM) has evolved significantly since its conceptual introduction in the 1980s. Initially developed for single-robot navigation in static environments, SLAM technology has undergone transformative advancements to address the complexities of multi-agent robotics coordination. The evolution trajectory began with filter-based approaches like Extended Kalman Filters (EKF) and particle filters, which provided foundational mathematical frameworks for uncertainty management in robot positioning and environmental mapping.
The mid-2000s marked a paradigm shift with the emergence of graph-based optimization techniques, significantly improving computational efficiency and accuracy. This period also witnessed the integration of visual sensors, giving rise to visual SLAM systems that leveraged camera data for enhanced environmental perception. The introduction of RGB-D cameras further revolutionized the field by enabling depth perception, crucial for accurate spatial understanding in multi-robot scenarios.
Recent technological advancements have focused on distributed SLAM architectures specifically designed for multi-agent systems. These developments aim to overcome the inherent challenges of coordinating multiple robots simultaneously mapping and navigating shared environments. Key objectives include minimizing communication overhead, ensuring map consistency across agents, and developing robust algorithms for dynamic environment adaptation.
The current frontier in multi-agent SLAM research centers on collaborative mapping strategies that optimize information sharing while maintaining individual agent autonomy. This includes developing efficient data fusion techniques that integrate heterogeneous sensor inputs from multiple robots to construct comprehensive environmental models. Additionally, researchers are exploring decentralized approaches that reduce dependency on central processing units, enhancing system resilience and scalability.
A critical objective in modern SLAM development is achieving real-time performance while maintaining high accuracy across diverse operational conditions. This necessitates algorithmic innovations that balance computational demands with precision requirements, particularly challenging when coordinating multiple agents with limited onboard processing capabilities. Researchers are increasingly leveraging machine learning techniques to enhance feature extraction, loop closure detection, and trajectory optimization in multi-agent contexts.
Looking forward, the field aims to develop SLAM systems capable of seamless operation in heterogeneous robot teams, where agents with varying sensor configurations and computational resources collaborate effectively. This includes creating adaptive frameworks that dynamically allocate mapping responsibilities based on individual agent capabilities and environmental conditions, ultimately enabling more flexible and robust multi-robot coordination in complex real-world applications.
The mid-2000s marked a paradigm shift with the emergence of graph-based optimization techniques, significantly improving computational efficiency and accuracy. This period also witnessed the integration of visual sensors, giving rise to visual SLAM systems that leveraged camera data for enhanced environmental perception. The introduction of RGB-D cameras further revolutionized the field by enabling depth perception, crucial for accurate spatial understanding in multi-robot scenarios.
Recent technological advancements have focused on distributed SLAM architectures specifically designed for multi-agent systems. These developments aim to overcome the inherent challenges of coordinating multiple robots simultaneously mapping and navigating shared environments. Key objectives include minimizing communication overhead, ensuring map consistency across agents, and developing robust algorithms for dynamic environment adaptation.
The current frontier in multi-agent SLAM research centers on collaborative mapping strategies that optimize information sharing while maintaining individual agent autonomy. This includes developing efficient data fusion techniques that integrate heterogeneous sensor inputs from multiple robots to construct comprehensive environmental models. Additionally, researchers are exploring decentralized approaches that reduce dependency on central processing units, enhancing system resilience and scalability.
A critical objective in modern SLAM development is achieving real-time performance while maintaining high accuracy across diverse operational conditions. This necessitates algorithmic innovations that balance computational demands with precision requirements, particularly challenging when coordinating multiple agents with limited onboard processing capabilities. Researchers are increasingly leveraging machine learning techniques to enhance feature extraction, loop closure detection, and trajectory optimization in multi-agent contexts.
Looking forward, the field aims to develop SLAM systems capable of seamless operation in heterogeneous robot teams, where agents with varying sensor configurations and computational resources collaborate effectively. This includes creating adaptive frameworks that dynamically allocate mapping responsibilities based on individual agent capabilities and environmental conditions, ultimately enabling more flexible and robust multi-robot coordination in complex real-world applications.
Market Applications for Multi-Agent SLAM Systems
Multi-agent SLAM systems are rapidly expanding into diverse market sectors, transforming operations across multiple industries. In warehouse management and logistics, these systems enable fleets of autonomous robots to coordinate mapping and navigation tasks, significantly improving operational efficiency. Companies like Amazon and Alibaba have deployed multi-agent robotic systems in their fulfillment centers, reporting productivity increases of up to 30% and reduction in picking errors by 20-25% compared to traditional methods.
The agricultural sector represents another promising market, with multi-agent SLAM systems being integrated into autonomous farming equipment for precision agriculture. These systems allow multiple robots to collaboratively map fields, monitor crop health, and perform targeted interventions. Market research indicates that the smart agriculture market utilizing such technologies is growing at a compound annual growth rate of 12.7%, projected to reach $23.1 billion by 2025.
In urban environments, multi-agent SLAM systems are finding applications in smart city initiatives, particularly for infrastructure inspection and maintenance. Coordinated drone swarms equipped with SLAM capabilities can efficiently inspect bridges, buildings, and other structures, reducing inspection time by up to 70% while improving detection accuracy of structural defects.
The security and surveillance sector has also begun adopting multi-agent SLAM technologies for coordinated monitoring of large areas. These systems enable multiple autonomous security robots to maintain consistent situational awareness while optimizing coverage. The market for security robots incorporating such technologies is expected to grow from $2.8 billion in 2021 to $7.9 billion by 2027.
Perhaps the most significant market potential lies in search and rescue operations, where multi-agent SLAM systems allow teams of robots to rapidly map disaster areas and coordinate search efforts. During recent natural disasters, experimental deployments of such systems demonstrated a 40% reduction in search time compared to traditional methods.
The mining industry represents another valuable application area, with multi-agent SLAM systems being used for underground mapping and resource exploration. These systems allow mining companies to create accurate 3D maps of tunnel networks while minimizing human exposure to hazardous environments. The mining automation market incorporating such technologies is projected to grow at 7.3% annually through 2026.
As hardware costs decrease and computational capabilities increase, we anticipate multi-agent SLAM systems will continue expanding into new markets, particularly in construction, environmental monitoring, and healthcare logistics, creating a diverse ecosystem of applications with substantial economic impact.
The agricultural sector represents another promising market, with multi-agent SLAM systems being integrated into autonomous farming equipment for precision agriculture. These systems allow multiple robots to collaboratively map fields, monitor crop health, and perform targeted interventions. Market research indicates that the smart agriculture market utilizing such technologies is growing at a compound annual growth rate of 12.7%, projected to reach $23.1 billion by 2025.
In urban environments, multi-agent SLAM systems are finding applications in smart city initiatives, particularly for infrastructure inspection and maintenance. Coordinated drone swarms equipped with SLAM capabilities can efficiently inspect bridges, buildings, and other structures, reducing inspection time by up to 70% while improving detection accuracy of structural defects.
The security and surveillance sector has also begun adopting multi-agent SLAM technologies for coordinated monitoring of large areas. These systems enable multiple autonomous security robots to maintain consistent situational awareness while optimizing coverage. The market for security robots incorporating such technologies is expected to grow from $2.8 billion in 2021 to $7.9 billion by 2027.
Perhaps the most significant market potential lies in search and rescue operations, where multi-agent SLAM systems allow teams of robots to rapidly map disaster areas and coordinate search efforts. During recent natural disasters, experimental deployments of such systems demonstrated a 40% reduction in search time compared to traditional methods.
The mining industry represents another valuable application area, with multi-agent SLAM systems being used for underground mapping and resource exploration. These systems allow mining companies to create accurate 3D maps of tunnel networks while minimizing human exposure to hazardous environments. The mining automation market incorporating such technologies is projected to grow at 7.3% annually through 2026.
As hardware costs decrease and computational capabilities increase, we anticipate multi-agent SLAM systems will continue expanding into new markets, particularly in construction, environmental monitoring, and healthcare logistics, creating a diverse ecosystem of applications with substantial economic impact.
Current SLAM Challenges in Multi-Robot Environments
Despite significant advancements in SLAM (Simultaneous Localization and Mapping) technology for single-robot applications, multi-agent SLAM environments present unique and complex challenges that remain largely unresolved. The fundamental issue of data association becomes exponentially more difficult when multiple robots operate simultaneously, as the system must correctly attribute observations to the appropriate agent while maintaining a coherent global map.
Map merging and consistency represent critical bottlenecks in multi-robot SLAM implementations. When robots operate in different areas and need to combine their individual maps, determining the correct transformation between coordinate frames with limited overlap becomes problematic. Even small errors in this process can propagate throughout the system, leading to catastrophic mapping failures and position drift.
Communication constraints significantly impact multi-robot SLAM performance in real-world deployments. Bandwidth limitations, latency issues, and potential communication dropouts restrict the amount and frequency of data exchange between robots. This necessitates intelligent data compression and prioritization strategies that can maintain mapping accuracy while minimizing communication overhead.
Computational resource allocation presents another significant challenge. Distributing computational tasks across multiple robots requires sophisticated algorithms that balance processing loads while ensuring timely responses for navigation decisions. The trade-off between centralized and decentralized processing architectures remains an active area of research without definitive optimal solutions.
Heterogeneous robot teams introduce additional complexity, as different sensing modalities, movement capabilities, and computational resources must be integrated into a cohesive mapping framework. Calibration between diverse sensor types and reconciling different levels of measurement uncertainty across platforms requires robust statistical methods that can adapt to varying conditions.
Dynamic environments pose particular difficulties for multi-robot SLAM systems. When multiple robots and other moving objects simultaneously navigate a space, distinguishing between static landmarks and temporary obstructions becomes challenging. Current algorithms struggle to maintain mapping consistency when the environment undergoes significant changes during the mapping process.
Scalability remains perhaps the most pressing challenge, as performance often degrades non-linearly as the number of robots increases. The computational complexity of maintaining global consistency across many agents can quickly become intractable with traditional approaches. Additionally, as the operational area expands, maintaining a unified coordinate system becomes increasingly difficult without external reference points.
Map merging and consistency represent critical bottlenecks in multi-robot SLAM implementations. When robots operate in different areas and need to combine their individual maps, determining the correct transformation between coordinate frames with limited overlap becomes problematic. Even small errors in this process can propagate throughout the system, leading to catastrophic mapping failures and position drift.
Communication constraints significantly impact multi-robot SLAM performance in real-world deployments. Bandwidth limitations, latency issues, and potential communication dropouts restrict the amount and frequency of data exchange between robots. This necessitates intelligent data compression and prioritization strategies that can maintain mapping accuracy while minimizing communication overhead.
Computational resource allocation presents another significant challenge. Distributing computational tasks across multiple robots requires sophisticated algorithms that balance processing loads while ensuring timely responses for navigation decisions. The trade-off between centralized and decentralized processing architectures remains an active area of research without definitive optimal solutions.
Heterogeneous robot teams introduce additional complexity, as different sensing modalities, movement capabilities, and computational resources must be integrated into a cohesive mapping framework. Calibration between diverse sensor types and reconciling different levels of measurement uncertainty across platforms requires robust statistical methods that can adapt to varying conditions.
Dynamic environments pose particular difficulties for multi-robot SLAM systems. When multiple robots and other moving objects simultaneously navigate a space, distinguishing between static landmarks and temporary obstructions becomes challenging. Current algorithms struggle to maintain mapping consistency when the environment undergoes significant changes during the mapping process.
Scalability remains perhaps the most pressing challenge, as performance often degrades non-linearly as the number of robots increases. The computational complexity of maintaining global consistency across many agents can quickly become intractable with traditional approaches. Additionally, as the operational area expands, maintaining a unified coordinate system becomes increasingly difficult without external reference points.
Existing Multi-Agent SLAM Coordination Approaches
01 Multi-sensor fusion for SLAM algorithms
Simultaneous Localization and Mapping (SLAM) algorithms can be enhanced through the fusion of data from multiple sensors. This approach combines information from different sources such as cameras, LiDAR, IMU, and radar to improve accuracy and robustness in various environments. Multi-sensor fusion helps overcome limitations of individual sensors, providing more comprehensive environmental perception and more reliable mapping and localization capabilities.- Multi-sensor fusion for SLAM algorithms: Simultaneous Localization and Mapping (SLAM) algorithms can be enhanced through the coordination of multiple sensors. By integrating data from various sensors such as cameras, LiDAR, and IMUs, the accuracy and robustness of SLAM systems can be significantly improved. This fusion approach allows for better environmental perception, more precise mapping, and more reliable localization, especially in challenging environments where a single sensor might fail or provide insufficient data.
- Distributed SLAM for multi-robot coordination: Distributed SLAM techniques enable multiple robots to collaboratively build and maintain maps of their environment while coordinating their movements. These systems distribute computational tasks across multiple agents, allowing for more efficient exploration and mapping of large areas. The coordination algorithms ensure that robots share information effectively, avoid redundant work, and maintain consistent global maps despite operating with partial information from their individual perspectives.
- Real-time optimization techniques for SLAM coordination: Real-time optimization techniques are crucial for effective SLAM algorithm coordination. These methods include loop closure detection, pose graph optimization, and bundle adjustment that help maintain consistency in mapping and localization. Advanced algorithms can dynamically adjust computational resources based on environmental complexity, ensuring efficient processing while maintaining accuracy. These optimization approaches enable SLAM systems to operate effectively in dynamic environments and on platforms with limited computational resources.
- Visual-inertial SLAM coordination frameworks: Visual-inertial SLAM frameworks coordinate data from cameras and inertial measurement units (IMUs) to achieve robust localization and mapping. These systems tightly couple visual features with motion data to overcome limitations of each individual sensor type. The coordination between visual and inertial data allows for improved tracking during rapid movements, handling of visually challenging scenarios like low-texture environments, and better scale estimation. This approach is particularly valuable for applications in augmented reality, autonomous navigation, and mobile robotics.
- Cloud-based collaborative SLAM systems: Cloud-based collaborative SLAM systems enable coordination between multiple devices by leveraging cloud computing resources. These systems allow for the sharing of mapping data across different agents, offloading of computationally intensive tasks to the cloud, and maintenance of consistent global maps. The cloud infrastructure facilitates real-time data exchange, map merging, and global optimization across distributed agents. This approach is particularly useful for applications involving fleets of autonomous vehicles, swarm robotics, or large-scale mapping projects where coordination between multiple mapping agents is essential.
02 Distributed SLAM for multi-robot coordination
Distributed SLAM systems enable multiple robots to coordinate their mapping and localization efforts. These systems allow robots to share map information, coordinate exploration strategies, and collectively build more comprehensive environmental models. By distributing computational tasks across multiple platforms, these approaches can cover larger areas more efficiently while maintaining consistent map representations across the robot team.Expand Specific Solutions03 Real-time optimization techniques for SLAM
Real-time optimization techniques are crucial for effective SLAM algorithm coordination. These methods include graph-based optimization, bundle adjustment, and pose graph optimization that allow systems to process sensor data and update maps efficiently. Advanced algorithms can handle loop closures, minimize drift, and maintain computational efficiency even in complex environments, enabling practical applications in autonomous navigation systems.Expand Specific Solutions04 Visual SLAM coordination frameworks
Visual SLAM frameworks coordinate various algorithm components specifically for camera-based mapping and localization. These systems manage feature extraction, tracking, mapping, and loop closure detection in a coordinated pipeline. Advanced visual SLAM approaches can handle challenging scenarios like dynamic environments, varying lighting conditions, and feature-poor settings through specialized coordination of detection, matching, and optimization algorithms.Expand Specific Solutions05 Cloud-based collaborative SLAM systems
Cloud-based collaborative SLAM systems enable coordination between multiple agents through centralized or distributed cloud infrastructure. These systems facilitate map sharing, global optimization, and collaborative localization across different devices or robots. By leveraging cloud computing resources, these approaches can handle computationally intensive tasks like global map optimization while allowing resource-constrained devices to participate in collaborative mapping efforts.Expand Specific Solutions
Leading Companies and Research Institutions in Multi-Agent SLAM
The SLAM (Simultaneous Localization and Mapping) algorithms in multi-agent robotics coordination market is currently in a growth phase, with an estimated market size of $2-3 billion and projected annual growth of 25-30%. The technology is approaching maturity but still faces challenges in real-time coordination and heterogeneous robot integration. Leading academic institutions like Beijing Institute of Technology and Northwestern Polytechnical University are advancing theoretical frameworks, while commercial players demonstrate varying levels of implementation success. Intel and Samsung are leveraging their computing infrastructure advantages, while specialized robotics companies like Pudu Technology and Yujin Robot focus on practical applications. TRX Systems and Arbe Robotics represent innovative startups developing niche solutions for indoor navigation and sensing technologies critical to multi-agent SLAM implementation.
Mitsubishi Electric Corp.
Technical Solution: Mitsubishi Electric has developed a robust multi-agent SLAM system called "Cooperative Positioning System" specifically designed for industrial environments. Their approach combines LiDAR-based SLAM with ultra-wideband (UWB) positioning technology to achieve centimeter-level accuracy in factory settings. The system employs a hierarchical mapping structure where robots build local maps that are merged into a global reference frame using their proprietary map-stitching algorithms. Mitsubishi's solution features adaptive communication protocols that adjust data exchange rates based on available bandwidth and task priorities. Their implementation includes fault-tolerance mechanisms where robots can continue operations even if some team members fail or lose connectivity. The system has been successfully deployed in warehouse automation scenarios where multiple AGVs (Automated Guided Vehicles) coordinate material handling tasks while maintaining precise positioning.
Strengths: Exceptional reliability in industrial environments with challenging conditions like metallic structures and dynamic obstacles. Highly scalable architecture proven to work with fleets of 50+ robots. Weaknesses: Higher implementation cost compared to vision-only solutions due to specialized hardware requirements. System optimization is primarily focused on structured industrial environments rather than unstructured outdoor settings.
Intel Corp.
Technical Solution: Intel has developed RealSense Tracking Cameras and the Intel Distribution of OpenVINO toolkit specifically optimized for SLAM in multi-agent robotics. Their approach combines visual-inertial SLAM with collaborative mapping techniques where multiple robots share environmental data through a centralized server architecture. Intel's D400 series depth cameras provide real-time depth perception crucial for SLAM applications. Their solution implements a distributed consensus algorithm that allows robots to merge local maps while minimizing communication overhead. Intel's technology enables dynamic task allocation among robot teams by maintaining a shared occupancy grid that updates as robots explore new areas. The system achieves sub-meter localization accuracy even in GPS-denied environments through their proprietary visual feature matching algorithms and sensor fusion techniques.
Strengths: Intel's hardware-software integration provides optimized performance and power efficiency. Their extensive ecosystem allows for seamless deployment across various robot platforms. Weaknesses: Solutions are often tied to Intel hardware, potentially limiting flexibility for systems using alternative processors. Higher computational requirements may challenge deployment on very small robots with limited processing capabilities.
Key Technical Innovations in Distributed Mapping
System and method for probabilistic multi-robot slam
PatentWO2021065122A1
Innovation
- Robots exchange particles instead of raw measurements, using probabilistic sampling and pairing to reduce computational complexity while ensuring Bayesian inference guarantees, allowing for efficient communication and processing with low-power transceivers and decentralized computation.




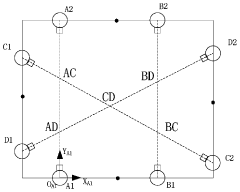
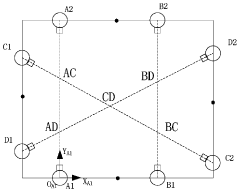
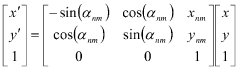
Simultaneous localization and mapping method for intelligent robot clusters
PatentActiveCN109917670A
Innovation
- Eight intelligent robot clusters are used to model the rectangular space at the same time, wireless communication and image processing are used to stitch local maps in real time, position and attitude information is identified through 360-degree positioning identification codes and ArUco algorithms, and the robot coordinate system transformation relationship is calculated to ensure that each group The robot moves along the edge of the rectangle and stops when it meets, realizing the splicing of the global map.

Communication Protocols for Robot Swarm Coordination
Effective communication is the cornerstone of multi-agent SLAM systems, enabling robots to share critical mapping and localization data while coordinating their movements. Current communication protocols for robot swarm coordination can be categorized into three primary architectures: centralized, decentralized, and hybrid approaches. Centralized protocols route all communication through a master node, offering simplified coordination but creating potential bottlenecks and single points of failure. Decentralized protocols, conversely, allow direct peer-to-peer communication between robots, enhancing robustness but increasing complexity in maintaining data consistency.
The bandwidth constraints in multi-agent SLAM systems present significant challenges, particularly in environments with limited connectivity. Advanced protocols implement data compression techniques and prioritization algorithms to reduce transmission overhead. For instance, ORB-SLAM based multi-agent systems typically compress feature descriptors before transmission, reducing bandwidth requirements by up to 70% while maintaining acceptable accuracy levels.
Latency management represents another critical aspect of swarm communication protocols. Time-sensitive SLAM operations require near real-time data exchange to maintain coherent maps across the swarm. Current state-of-the-art protocols employ predictive algorithms to compensate for communication delays, with some implementations achieving effective coordination despite latencies of up to 200ms in challenging environments.
Security considerations have gained prominence in recent protocol developments. Encrypted communication channels protect against unauthorized access and data manipulation, while authentication mechanisms ensure that only trusted agents participate in the swarm. These security features are particularly crucial in applications involving sensitive environments or missions.
Fault tolerance mechanisms represent a significant advancement in modern swarm communication protocols. Dynamic routing algorithms can automatically reconfigure communication pathways when robots lose connectivity, while consensus algorithms help maintain map consistency despite intermittent communication failures. The DDS (Data Distribution Service) middleware has emerged as a popular foundation for implementing reliable communication in multi-agent SLAM systems, offering quality-of-service guarantees that align well with the requirements of distributed robotics.
Standardization efforts are gradually emerging, with ROS2 (Robot Operating System 2) providing a common framework that incorporates many of these advanced communication features. This standardization facilitates interoperability between different robot platforms and accelerates the development of robust multi-agent SLAM implementations across diverse application domains.
The bandwidth constraints in multi-agent SLAM systems present significant challenges, particularly in environments with limited connectivity. Advanced protocols implement data compression techniques and prioritization algorithms to reduce transmission overhead. For instance, ORB-SLAM based multi-agent systems typically compress feature descriptors before transmission, reducing bandwidth requirements by up to 70% while maintaining acceptable accuracy levels.
Latency management represents another critical aspect of swarm communication protocols. Time-sensitive SLAM operations require near real-time data exchange to maintain coherent maps across the swarm. Current state-of-the-art protocols employ predictive algorithms to compensate for communication delays, with some implementations achieving effective coordination despite latencies of up to 200ms in challenging environments.
Security considerations have gained prominence in recent protocol developments. Encrypted communication channels protect against unauthorized access and data manipulation, while authentication mechanisms ensure that only trusted agents participate in the swarm. These security features are particularly crucial in applications involving sensitive environments or missions.
Fault tolerance mechanisms represent a significant advancement in modern swarm communication protocols. Dynamic routing algorithms can automatically reconfigure communication pathways when robots lose connectivity, while consensus algorithms help maintain map consistency despite intermittent communication failures. The DDS (Data Distribution Service) middleware has emerged as a popular foundation for implementing reliable communication in multi-agent SLAM systems, offering quality-of-service guarantees that align well with the requirements of distributed robotics.
Standardization efforts are gradually emerging, with ROS2 (Robot Operating System 2) providing a common framework that incorporates many of these advanced communication features. This standardization facilitates interoperability between different robot platforms and accelerates the development of robust multi-agent SLAM implementations across diverse application domains.
Resource Optimization in Distributed SLAM Systems
Resource optimization stands as a critical challenge in distributed SLAM systems, particularly when multiple agents operate in complex environments with limited computational and communication resources. The distributed nature of multi-agent SLAM introduces unique constraints where processing power, memory, bandwidth, and energy must be carefully managed to ensure system efficiency and reliability.
Computational load balancing represents a primary optimization concern, with various strategies emerging to distribute processing tasks effectively across agents. Hierarchical approaches designate certain robots as computational hubs that process data from multiple sources, while peer-to-peer architectures distribute computational loads more evenly. Recent advancements in edge computing have enabled dynamic resource allocation, where computational tasks shift between agents based on current processing capabilities and workloads.
Communication bandwidth optimization has seen significant progress through selective information sharing protocols. Rather than transmitting complete map data, agents exchange compressed feature representations or keyframes, substantially reducing bandwidth requirements. Semantic-based communication further enhances efficiency by prioritizing the transmission of high-value environmental features while filtering redundant information.
Energy consumption management has become increasingly sophisticated in battery-powered multi-agent systems. Adaptive sensing strategies adjust sensor activation patterns based on environmental complexity and task requirements, while intelligent sleep-wake scheduling maximizes operational time. Some systems implement predictive energy models that forecast consumption patterns and optimize task allocation accordingly.
Memory utilization techniques have evolved to address the challenges of storing extensive environmental data across distributed agents. Map compression algorithms reduce storage requirements through feature selection and sparse representation methods. Distributed storage architectures partition environmental maps across multiple agents, with each maintaining only relevant portions while accessing others through the network when necessary.
Quality-of-service (QoS) frameworks have emerged as comprehensive solutions that dynamically balance resource allocation based on mission priorities. These frameworks continuously monitor system performance metrics and adjust resource distribution to maintain critical functionalities under varying conditions. Machine learning approaches increasingly inform these optimization decisions, with reinforcement learning algorithms adapting resource allocation strategies based on operational experience and changing environmental conditions.
The integration of these optimization techniques has enabled significant improvements in distributed SLAM system performance, allowing larger robot teams to operate effectively in more complex environments while maintaining reasonable resource requirements.
Computational load balancing represents a primary optimization concern, with various strategies emerging to distribute processing tasks effectively across agents. Hierarchical approaches designate certain robots as computational hubs that process data from multiple sources, while peer-to-peer architectures distribute computational loads more evenly. Recent advancements in edge computing have enabled dynamic resource allocation, where computational tasks shift between agents based on current processing capabilities and workloads.
Communication bandwidth optimization has seen significant progress through selective information sharing protocols. Rather than transmitting complete map data, agents exchange compressed feature representations or keyframes, substantially reducing bandwidth requirements. Semantic-based communication further enhances efficiency by prioritizing the transmission of high-value environmental features while filtering redundant information.
Energy consumption management has become increasingly sophisticated in battery-powered multi-agent systems. Adaptive sensing strategies adjust sensor activation patterns based on environmental complexity and task requirements, while intelligent sleep-wake scheduling maximizes operational time. Some systems implement predictive energy models that forecast consumption patterns and optimize task allocation accordingly.
Memory utilization techniques have evolved to address the challenges of storing extensive environmental data across distributed agents. Map compression algorithms reduce storage requirements through feature selection and sparse representation methods. Distributed storage architectures partition environmental maps across multiple agents, with each maintaining only relevant portions while accessing others through the network when necessary.
Quality-of-service (QoS) frameworks have emerged as comprehensive solutions that dynamically balance resource allocation based on mission priorities. These frameworks continuously monitor system performance metrics and adjust resource distribution to maintain critical functionalities under varying conditions. Machine learning approaches increasingly inform these optimization decisions, with reinforcement learning algorithms adapting resource allocation strategies based on operational experience and changing environmental conditions.
The integration of these optimization techniques has enabled significant improvements in distributed SLAM system performance, allowing larger robot teams to operate effectively in more complex environments while maintaining reasonable resource requirements.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!