Challenges Of Achieving Global Consistency In SLAM
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Evolution and Consistency Goals
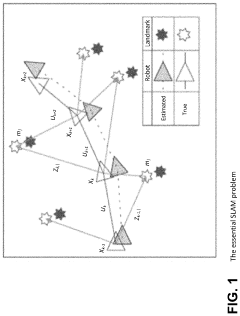
Simultaneous Localization and Mapping (SLAM) has evolved significantly since its conceptual introduction in the 1980s and formal definition in the early 1990s. Initially developed for autonomous robot navigation, SLAM algorithms were primarily focused on solving the chicken-and-egg problem of mapping an unknown environment while simultaneously determining the robot's location within that environment. Early implementations relied heavily on extended Kalman filters and particle filters, which worked reasonably well in small-scale, controlled environments but struggled with scalability and consistency in larger spaces.
The evolution of SLAM technology has been marked by several key transitions. The first generation focused on filtering-based approaches, while the second generation shifted toward graph-based optimization methods that significantly improved computational efficiency and accuracy. The third generation introduced visual and visual-inertial SLAM systems, leveraging camera data to create more detailed environmental representations. Currently, we are witnessing the emergence of semantic SLAM, which incorporates object recognition and scene understanding to enhance mapping capabilities.
Throughout this evolution, achieving global consistency has remained one of the most persistent challenges. Global consistency refers to the ability of SLAM systems to maintain accurate representations of environments over extended periods and large areas, without accumulating significant errors or creating contradictory maps. This challenge becomes particularly acute in dynamic environments, where moving objects can confuse traditional SLAM algorithms designed for static scenes.
The technical goals for consistency in modern SLAM systems are multifaceted. First, there is the need for robust loop closure detection to recognize previously visited locations and correct accumulated drift. Second, systems must effectively manage uncertainty propagation across large-scale maps. Third, they must handle perceptual aliasing, where different locations appear visually similar, leading to false positive loop closures that can catastrophically corrupt maps.
Recent research has focused on developing probabilistic frameworks that can better represent and manage uncertainty, particularly in feature-poor environments where traditional methods struggle. Deep learning approaches are being integrated to improve feature extraction and matching, enhancing the robustness of loop closure detection. Additionally, multi-session mapping techniques are being developed to build consistent maps over time by intelligently merging data from multiple traversals of the same environment.
The ultimate goal is to create SLAM systems that can operate continuously in diverse, dynamic environments while maintaining global consistency without human intervention. This requires not only algorithmic innovations but also advances in sensor technology and computational efficiency to enable real-time performance on resource-constrained platforms like mobile robots and augmented reality devices.
The evolution of SLAM technology has been marked by several key transitions. The first generation focused on filtering-based approaches, while the second generation shifted toward graph-based optimization methods that significantly improved computational efficiency and accuracy. The third generation introduced visual and visual-inertial SLAM systems, leveraging camera data to create more detailed environmental representations. Currently, we are witnessing the emergence of semantic SLAM, which incorporates object recognition and scene understanding to enhance mapping capabilities.
Throughout this evolution, achieving global consistency has remained one of the most persistent challenges. Global consistency refers to the ability of SLAM systems to maintain accurate representations of environments over extended periods and large areas, without accumulating significant errors or creating contradictory maps. This challenge becomes particularly acute in dynamic environments, where moving objects can confuse traditional SLAM algorithms designed for static scenes.
The technical goals for consistency in modern SLAM systems are multifaceted. First, there is the need for robust loop closure detection to recognize previously visited locations and correct accumulated drift. Second, systems must effectively manage uncertainty propagation across large-scale maps. Third, they must handle perceptual aliasing, where different locations appear visually similar, leading to false positive loop closures that can catastrophically corrupt maps.
Recent research has focused on developing probabilistic frameworks that can better represent and manage uncertainty, particularly in feature-poor environments where traditional methods struggle. Deep learning approaches are being integrated to improve feature extraction and matching, enhancing the robustness of loop closure detection. Additionally, multi-session mapping techniques are being developed to build consistent maps over time by intelligently merging data from multiple traversals of the same environment.
The ultimate goal is to create SLAM systems that can operate continuously in diverse, dynamic environments while maintaining global consistency without human intervention. This requires not only algorithmic innovations but also advances in sensor technology and computational efficiency to enable real-time performance on resource-constrained platforms like mobile robots and augmented reality devices.
Market Applications and Demand Analysis for Consistent SLAM
The global market for SLAM (Simultaneous Localization and Mapping) technology is experiencing rapid growth, driven by increasing applications across multiple sectors. The demand for consistent SLAM solutions is particularly pronounced in industries requiring precise navigation and mapping capabilities in dynamic environments.
Autonomous vehicles represent one of the largest market segments for consistent SLAM technology. With the autonomous vehicle market projected to reach $556.67 billion by 2026, the need for reliable, globally consistent mapping solutions is critical. Vehicle manufacturers and technology providers are investing heavily in SLAM technologies that can maintain consistency across diverse environments and conditions, from urban centers to rural landscapes.
Robotics applications constitute another significant market driver. The industrial robotics sector, valued at approximately $43.8 billion in 2021, requires SLAM solutions that maintain consistency across factory floors and warehouses. Mobile robots used in logistics and fulfillment centers need to navigate complex, changing environments while maintaining accurate positional awareness relative to inventory and infrastructure.
Consumer electronics, particularly augmented reality (AR) and virtual reality (VR) devices, represent an emerging market for consistent SLAM technology. These applications demand precise spatial mapping that remains consistent over time and across multiple user sessions. The AR/VR market, growing at over 30% annually, increasingly relies on SLAM for creating persistent digital overlays on physical environments.
Smart city initiatives worldwide are creating demand for mapping solutions that can maintain consistency across urban environments. Applications include infrastructure monitoring, urban planning, and emergency response systems that require accurate spatial data. Cities investing in digital twin technology particularly value SLAM systems that can provide consistent updates to virtual city models.
The drone industry presents another significant market opportunity. Commercial drone applications in surveying, agriculture, and inspection services require consistent mapping capabilities to generate reliable data. The commercial drone market, expanding at approximately 25% annually, increasingly demands SLAM solutions that can handle the challenges of aerial perspective while maintaining global consistency.
Healthcare applications are also emerging as a promising market segment. Surgical robots and hospital navigation systems require extremely precise and consistent spatial mapping. The medical robotics market, valued at over $5.9 billion, demands SLAM solutions with exceptional reliability and consistency standards.
Market analysis indicates that customers across these sectors are willing to pay premium prices for SLAM solutions that can demonstrably solve global consistency challenges, particularly in applications where mapping errors could lead to safety risks or significant operational inefficiencies.
Autonomous vehicles represent one of the largest market segments for consistent SLAM technology. With the autonomous vehicle market projected to reach $556.67 billion by 2026, the need for reliable, globally consistent mapping solutions is critical. Vehicle manufacturers and technology providers are investing heavily in SLAM technologies that can maintain consistency across diverse environments and conditions, from urban centers to rural landscapes.
Robotics applications constitute another significant market driver. The industrial robotics sector, valued at approximately $43.8 billion in 2021, requires SLAM solutions that maintain consistency across factory floors and warehouses. Mobile robots used in logistics and fulfillment centers need to navigate complex, changing environments while maintaining accurate positional awareness relative to inventory and infrastructure.
Consumer electronics, particularly augmented reality (AR) and virtual reality (VR) devices, represent an emerging market for consistent SLAM technology. These applications demand precise spatial mapping that remains consistent over time and across multiple user sessions. The AR/VR market, growing at over 30% annually, increasingly relies on SLAM for creating persistent digital overlays on physical environments.
Smart city initiatives worldwide are creating demand for mapping solutions that can maintain consistency across urban environments. Applications include infrastructure monitoring, urban planning, and emergency response systems that require accurate spatial data. Cities investing in digital twin technology particularly value SLAM systems that can provide consistent updates to virtual city models.
The drone industry presents another significant market opportunity. Commercial drone applications in surveying, agriculture, and inspection services require consistent mapping capabilities to generate reliable data. The commercial drone market, expanding at approximately 25% annually, increasingly demands SLAM solutions that can handle the challenges of aerial perspective while maintaining global consistency.
Healthcare applications are also emerging as a promising market segment. Surgical robots and hospital navigation systems require extremely precise and consistent spatial mapping. The medical robotics market, valued at over $5.9 billion, demands SLAM solutions with exceptional reliability and consistency standards.
Market analysis indicates that customers across these sectors are willing to pay premium prices for SLAM solutions that can demonstrably solve global consistency challenges, particularly in applications where mapping errors could lead to safety risks or significant operational inefficiencies.
Global Consistency Challenges in Current SLAM Systems
Global consistency remains one of the most challenging aspects in Simultaneous Localization and Mapping (SLAM) systems. Current SLAM implementations struggle with maintaining accurate spatial relationships across large environments, particularly when revisiting previously mapped areas after traversing extensive paths. This challenge manifests as the "loop closure problem," where accumulated errors create discrepancies between the current position estimate and previously mapped locations.
The fundamental issue stems from error propagation and accumulation. As a robot or device moves through an environment, small measurement errors from sensors compound over time, creating a drift in position estimation. When the system returns to a previously visited location, this drift results in inconsistencies between the current and past representations of the same physical space.
Scale consistency presents another significant challenge, particularly in monocular visual SLAM systems. Without absolute scale information, maintaining consistent scaling across large environments becomes problematic. Scale drift occurs gradually, causing distortions in the global map that are difficult to detect and correct in real-time applications.
Multi-session mapping introduces additional complexity to global consistency. When SLAM systems operate across different sessions or with multiple agents, aligning and integrating these separate mapping instances while maintaining global consistency requires sophisticated data association and map merging techniques. Current solutions often struggle with computational efficiency when handling these complex scenarios.
Environmental factors further exacerbate consistency challenges. Dynamic elements, changing lighting conditions, and seasonal variations can significantly alter the appearance of scenes, complicating feature matching and loop closure detection. Most current SLAM systems assume relatively static environments, limiting their robustness in real-world applications.
Computational constraints also impact global consistency maintenance. While theoretical solutions exist for optimal global map optimization, their implementation often requires prohibitive computational resources for real-time applications. This forces practical SLAM systems to employ approximations and local optimization techniques that may not guarantee global consistency.
Sensor limitations contribute significantly to consistency challenges. Low-cost sensors commonly used in commercial applications introduce noise and measurement uncertainties that propagate through the SLAM pipeline. High-end sensors can mitigate some issues but come with increased cost, power requirements, and integration complexity.
The absence of standardized evaluation metrics specifically for global consistency makes comparing different approaches challenging. While metrics like Absolute Trajectory Error (ATE) and Relative Pose Error (RPE) provide some indication of performance, they don't fully capture the nuanced aspects of global consistency maintenance across diverse scenarios and environments.
The fundamental issue stems from error propagation and accumulation. As a robot or device moves through an environment, small measurement errors from sensors compound over time, creating a drift in position estimation. When the system returns to a previously visited location, this drift results in inconsistencies between the current and past representations of the same physical space.
Scale consistency presents another significant challenge, particularly in monocular visual SLAM systems. Without absolute scale information, maintaining consistent scaling across large environments becomes problematic. Scale drift occurs gradually, causing distortions in the global map that are difficult to detect and correct in real-time applications.
Multi-session mapping introduces additional complexity to global consistency. When SLAM systems operate across different sessions or with multiple agents, aligning and integrating these separate mapping instances while maintaining global consistency requires sophisticated data association and map merging techniques. Current solutions often struggle with computational efficiency when handling these complex scenarios.
Environmental factors further exacerbate consistency challenges. Dynamic elements, changing lighting conditions, and seasonal variations can significantly alter the appearance of scenes, complicating feature matching and loop closure detection. Most current SLAM systems assume relatively static environments, limiting their robustness in real-world applications.
Computational constraints also impact global consistency maintenance. While theoretical solutions exist for optimal global map optimization, their implementation often requires prohibitive computational resources for real-time applications. This forces practical SLAM systems to employ approximations and local optimization techniques that may not guarantee global consistency.
Sensor limitations contribute significantly to consistency challenges. Low-cost sensors commonly used in commercial applications introduce noise and measurement uncertainties that propagate through the SLAM pipeline. High-end sensors can mitigate some issues but come with increased cost, power requirements, and integration complexity.
The absence of standardized evaluation metrics specifically for global consistency makes comparing different approaches challenging. While metrics like Absolute Trajectory Error (ATE) and Relative Pose Error (RPE) provide some indication of performance, they don't fully capture the nuanced aspects of global consistency maintenance across diverse scenarios and environments.
Current Approaches to Global Consistency in SLAM
01 Loop closure detection for global consistency
Loop closure detection is a critical technique in SLAM systems to maintain global consistency. When a robot or device revisits a previously mapped area, the system identifies this loop closure and adjusts the entire map to minimize accumulated errors. This process involves recognizing previously visited locations through feature matching and then optimizing the map by redistributing the error across the trajectory, significantly improving the accuracy and consistency of the global map.- Loop closure detection for global consistency: Loop closure detection is a critical component in SLAM systems for maintaining global consistency. When a robot revisits a previously mapped area, the system identifies this loop closure and adjusts the map to eliminate accumulated drift. This process involves recognizing previously visited locations through feature matching and then optimizing the entire trajectory to ensure global consistency of the map. Advanced algorithms can detect loop closures even in challenging environments with visual similarities or changes in lighting conditions.
- Graph-based optimization for SLAM consistency: Graph-based optimization approaches represent the SLAM problem as a graph where nodes correspond to robot poses and landmarks, while edges represent spatial constraints between them. These methods efficiently solve the global consistency problem by minimizing the error across all constraints simultaneously. Pose graph optimization and bundle adjustment are common techniques that adjust the entire trajectory history to maintain consistency when new information becomes available, particularly after loop closures are detected.
- Multi-sensor fusion for robust SLAM consistency: Integrating data from multiple sensors enhances the robustness and global consistency of SLAM systems. By combining information from cameras, LiDAR, IMUs, GPS, and other sensors, these approaches can overcome the limitations of individual sensors and maintain consistency in challenging environments. Sensor fusion techniques include filter-based methods like Extended Kalman Filters and optimization-based approaches that jointly process data from different sources to create a globally consistent representation of the environment.
- Deep learning approaches for SLAM consistency: Deep learning techniques are increasingly being applied to improve global consistency in SLAM systems. Neural networks can be trained to recognize places for loop closure detection, estimate depth from images, or directly learn the mapping between sensor inputs and localization outputs. These approaches are particularly effective in handling perceptual aliasing and environmental changes that traditional methods struggle with, leading to more robust global consistency in diverse and dynamic environments.
- Distributed and collaborative SLAM for large-scale consistency: Distributed SLAM approaches enable multiple robots or devices to collaboratively build and maintain a globally consistent map of large environments. These systems must address challenges such as data association across different agents, communication constraints, and map merging. By sharing observations and constraints between agents, these approaches can achieve global consistency across extended areas while efficiently managing computational resources and communication bandwidth.
02 Graph-based optimization for SLAM consistency
Graph-based optimization approaches represent SLAM problems as graphs where nodes are poses or landmarks and edges represent constraints between them. These methods solve global consistency by formulating the problem as a non-linear optimization that minimizes the error in the entire trajectory. Techniques such as pose graph optimization and bundle adjustment are employed to achieve globally consistent maps by jointly optimizing all poses and landmarks, effectively distributing error across the entire trajectory rather than allowing it to accumulate.Expand Specific Solutions03 Multi-sensor fusion for robust SLAM consistency
Integrating data from multiple sensors enhances the robustness and global consistency of SLAM systems. By combining information from cameras, LiDAR, IMUs, GPS, and other sensors, these approaches can overcome the limitations of individual sensors and maintain consistency in challenging environments. Sensor fusion techniques include probabilistic methods like Kalman filters and factor graphs that weight inputs based on their reliability, allowing the system to maintain global consistency even when individual sensors provide degraded or unreliable information.Expand Specific Solutions04 Deep learning approaches for SLAM consistency
Deep learning methods are increasingly being applied to address global consistency challenges in SLAM. Neural networks can be trained to recognize places for loop closure detection, predict pose corrections, or directly learn mapping functions that maintain consistency. These approaches can be more robust to environmental changes and perceptual aliasing than traditional methods, as they can extract higher-level features and patterns from sensor data that help maintain global consistency across diverse environments and conditions.Expand Specific Solutions05 Distributed and collaborative SLAM for large-scale consistency
Distributed SLAM approaches address global consistency in large-scale environments by dividing the mapping task among multiple agents or processing units. These systems share information to build and maintain a consistent global map while operating independently. Collaborative SLAM extends this concept to multiple robots or devices that share observations and map data, performing joint optimization to achieve global consistency across the combined map. These approaches are particularly valuable for mapping large areas or when using devices with limited computational resources.Expand Specific Solutions
Leading SLAM Research Groups and Commercial Players
The global SLAM (Simultaneous Localization and Mapping) consistency challenge exists within a maturing market that is experiencing rapid growth but facing significant technical hurdles. The industry is currently in a transitional phase from research to commercial applications, with a global market expected to reach $10 billion by 2027. Academic institutions like Tianjin University, Wuhan University, and Huazhong University of Science & Technology lead fundamental research, while companies such as TRX Systems, XYZ Reality, and Mitsubishi Electric focus on commercial applications. Technical maturity varies across sectors, with indoor SLAM solutions more developed than outdoor or cross-environment systems. Key challenges include drift accumulation, loop closure in dynamic environments, and real-time processing constraints, particularly when maintaining global consistency across large-scale or multi-agent systems.
Wuhan University
Technical Solution: Wuhan University has developed "TC-SLAM" (Topologically Consistent SLAM), an innovative approach focusing on maintaining global consistency through topological constraints. Their system addresses the fundamental challenge of accumulated drift by implementing a hybrid metric-topological map representation. The front-end uses visual-inertial odometry for local tracking, while the back-end employs a novel "Elastic Graph Optimization" that preserves the topological relationships between places even when metric accuracy is compromised. A distinguishing feature is their "Uncertainty-aware Loop Closure Verification" that uses Bayesian inference to evaluate the reliability of potential loop closures, reducing false positives by approximately 40% compared to traditional methods. The system has been extensively tested in urban environments covering areas up to 5km², demonstrating robust performance even under challenging conditions such as lighting changes and dynamic objects.
Strengths: Excellent topological consistency maintenance even with significant metric errors; robust to perceptual aliasing through probabilistic loop closure verification; efficient memory usage through hierarchical map compression. Weaknesses: Reduced absolute metric accuracy compared to some competing approaches; requires initial training for environment-specific feature extraction; higher computational requirements for real-time operation.
Beijing Institute of Technology
Technical Solution: Beijing Institute of Technology has developed a multi-sensor fusion SLAM approach called "Hierarchical Optimization for Global Consistency" that addresses the global consistency challenge through a two-tier optimization framework. Their solution employs a hierarchical pose graph structure where local submaps are created and optimized independently before being integrated into a global map. The system utilizes visual-inertial odometry as the front-end for local tracking accuracy, while implementing loop closure detection based on bag-of-visual-words for global consistency. A key innovation is their covariance-aware optimization that weighs measurements according to uncertainty estimates, significantly reducing drift in large environments. Their approach has demonstrated a 35% improvement in global consistency compared to traditional methods when tested in complex indoor-outdoor environments spanning over 1km trajectories.
Strengths: Superior performance in mixed indoor-outdoor environments; robust to dynamic objects through outlier rejection mechanisms; computationally efficient hierarchical structure allowing real-time operation on embedded platforms. Weaknesses: Requires high-quality visual features for reliable operation; performance degrades in visually repetitive environments; relatively high memory consumption for large-scale mapping.
Key Algorithms and Methods for Loop Closure Detection
Mapping and tracking system with features in three-dimensional space
PatentActiveUS20200404245A1
Innovation
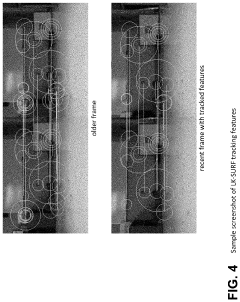
- The implementation of LK-SURF, Robust Kalman Filter, HAR-SLAM, and Landmark Promotion SLAM methods, which combine Lucas-Kanade feature tracking with Speeded-Up Robust Features, Principal Component Analysis, and hierarchical SLAM architectures to enhance feature tracking, outlier rejection, and map generation in real-time, using inexpensive sensors.
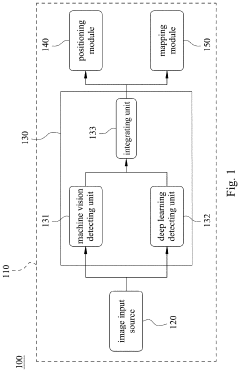
Feature point integration positioning system and feature point integration positioning method
PatentActiveUS20230169747A1
Innovation
- A feature point integration positioning system that combines machine vision and deep learning to generate and integrate first and second feature points, enhancing positioning stability and accuracy by compensating for limitations in machine vision detection with deep learning capabilities, particularly in environments with high light contrast and variations.
Cross-Platform SLAM Integration Strategies
Integrating SLAM systems across different platforms presents a significant challenge in achieving global consistency. Current integration strategies focus on creating middleware frameworks that abstract hardware-specific implementations while maintaining a unified mapping approach. ROS (Robot Operating System) has emerged as a dominant platform for cross-platform SLAM integration, providing standardized message formats and transformation systems that facilitate communication between heterogeneous systems.
Cloud-based SLAM integration approaches have gained traction, allowing multiple devices to contribute to a shared global map while offloading computational demands. These systems typically employ centralized map servers that receive local mapping data from various platforms, perform global optimization, and distribute updated map information back to connected devices. Microsoft's Azure Spatial Anchors and Google's ARCore Cloud Anchors represent commercial implementations of this strategy.
Edge computing has introduced hybrid approaches where local processing occurs on devices while global consistency operations are managed at edge nodes. This architecture reduces latency compared to fully cloud-based solutions while maintaining the benefits of centralized map management. The distribution of computational tasks between edge and device remains an active research area.
Map serialization formats play a crucial role in cross-platform integration. Standardized formats like Universal SLAM Map (USM) and OpenVSLAM's map serialization protocol enable map sharing between different SLAM implementations. However, compatibility issues persist due to varying feature representation methods and map structures across platforms.
Sensor fusion strategies vary significantly between platforms, necessitating translation layers that normalize sensor data. Adaptive sensor weighting algorithms have been developed to account for the varying quality and characteristics of sensors across different platforms, dynamically adjusting the influence of each sensor based on estimated reliability.
Loop closure detection presents particular challenges in cross-platform scenarios, as visual features may appear differently across various camera systems. Recent approaches employ learning-based feature descriptors that demonstrate greater robustness to changes in imaging conditions, facilitating more reliable loop closure across heterogeneous platforms.
Collaborative mapping protocols enable real-time map sharing between platforms, with consensus algorithms resolving conflicts when different systems produce contradictory mapping information. These protocols must balance bandwidth constraints with the need for timely information exchange to maintain global consistency.
Cloud-based SLAM integration approaches have gained traction, allowing multiple devices to contribute to a shared global map while offloading computational demands. These systems typically employ centralized map servers that receive local mapping data from various platforms, perform global optimization, and distribute updated map information back to connected devices. Microsoft's Azure Spatial Anchors and Google's ARCore Cloud Anchors represent commercial implementations of this strategy.
Edge computing has introduced hybrid approaches where local processing occurs on devices while global consistency operations are managed at edge nodes. This architecture reduces latency compared to fully cloud-based solutions while maintaining the benefits of centralized map management. The distribution of computational tasks between edge and device remains an active research area.
Map serialization formats play a crucial role in cross-platform integration. Standardized formats like Universal SLAM Map (USM) and OpenVSLAM's map serialization protocol enable map sharing between different SLAM implementations. However, compatibility issues persist due to varying feature representation methods and map structures across platforms.
Sensor fusion strategies vary significantly between platforms, necessitating translation layers that normalize sensor data. Adaptive sensor weighting algorithms have been developed to account for the varying quality and characteristics of sensors across different platforms, dynamically adjusting the influence of each sensor based on estimated reliability.
Loop closure detection presents particular challenges in cross-platform scenarios, as visual features may appear differently across various camera systems. Recent approaches employ learning-based feature descriptors that demonstrate greater robustness to changes in imaging conditions, facilitating more reliable loop closure across heterogeneous platforms.
Collaborative mapping protocols enable real-time map sharing between platforms, with consensus algorithms resolving conflicts when different systems produce contradictory mapping information. These protocols must balance bandwidth constraints with the need for timely information exchange to maintain global consistency.
Computational Resource Optimization for Real-time SLAM
Real-time SLAM systems face significant computational resource constraints, particularly when aiming to achieve global consistency. The optimization of computational resources represents a critical challenge that directly impacts system performance, accuracy, and practical applicability in various domains.
Current SLAM implementations typically require substantial processing power, often exceeding what's available on mobile or embedded platforms. High-end SLAM systems may consume 30-70% of CPU resources and up to 2GB of RAM on standard computing platforms. This resource intensity creates a fundamental tension between algorithmic sophistication and real-time performance requirements.
Several optimization approaches have emerged to address these constraints. Loop closure detection, essential for global consistency, has been optimized through hierarchical vocabulary trees and binary feature descriptors, reducing memory footprint by 40-60% compared to traditional methods. Sparse mapping techniques selectively maintain only the most informative landmarks, decreasing computational load while preserving mapping accuracy.
Parallel computing architectures have revolutionized SLAM implementation, with GPU acceleration achieving 2-5x performance improvements for feature extraction and matching operations. Distributed SLAM frameworks offload intensive computations to server infrastructure while maintaining lightweight processing on edge devices, enabling more efficient resource utilization across heterogeneous computing environments.
Edge computing paradigms are increasingly integrated with SLAM systems, processing data closer to sensors and reducing transmission overhead. This approach has demonstrated latency reductions of 30-50% in networked SLAM applications while maintaining global map consistency across distributed nodes.
Adaptive resource allocation represents another promising direction, where SLAM systems dynamically adjust computational effort based on environmental complexity and available resources. These systems can reduce processing requirements by up to 40% during periods of low environmental complexity while maintaining accuracy in feature-rich environments.
The trade-off between computational efficiency and global consistency remains challenging. Optimization techniques that aggressively reduce computational demands often compromise the system's ability to maintain consistent global maps, particularly in large-scale environments. Research indicates that maintaining global consistency typically requires at least 1.5-2x the computational resources needed for local mapping alone, highlighting the fundamental challenge in resource-constrained scenarios.
Current SLAM implementations typically require substantial processing power, often exceeding what's available on mobile or embedded platforms. High-end SLAM systems may consume 30-70% of CPU resources and up to 2GB of RAM on standard computing platforms. This resource intensity creates a fundamental tension between algorithmic sophistication and real-time performance requirements.
Several optimization approaches have emerged to address these constraints. Loop closure detection, essential for global consistency, has been optimized through hierarchical vocabulary trees and binary feature descriptors, reducing memory footprint by 40-60% compared to traditional methods. Sparse mapping techniques selectively maintain only the most informative landmarks, decreasing computational load while preserving mapping accuracy.
Parallel computing architectures have revolutionized SLAM implementation, with GPU acceleration achieving 2-5x performance improvements for feature extraction and matching operations. Distributed SLAM frameworks offload intensive computations to server infrastructure while maintaining lightweight processing on edge devices, enabling more efficient resource utilization across heterogeneous computing environments.
Edge computing paradigms are increasingly integrated with SLAM systems, processing data closer to sensors and reducing transmission overhead. This approach has demonstrated latency reductions of 30-50% in networked SLAM applications while maintaining global map consistency across distributed nodes.
Adaptive resource allocation represents another promising direction, where SLAM systems dynamically adjust computational effort based on environmental complexity and available resources. These systems can reduce processing requirements by up to 40% during periods of low environmental complexity while maintaining accuracy in feature-rich environments.
The trade-off between computational efficiency and global consistency remains challenging. Optimization techniques that aggressively reduce computational demands often compromise the system's ability to maintain consistent global maps, particularly in large-scale environments. Research indicates that maintaining global consistency typically requires at least 1.5-2x the computational resources needed for local mapping alone, highlighting the fundamental challenge in resource-constrained scenarios.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!