

SLAM Algorithms For Underwater Robotics Applications
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Underwater SLAM Technology Background and Objectives
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly over the past three decades, with its applications expanding from terrestrial environments to challenging underwater domains. The underwater environment presents unique challenges for robotic navigation and mapping due to limited visibility, pressure variations, and the absence of GPS signals. Traditional SLAM algorithms developed for land-based applications require substantial modifications to function effectively underwater.
The evolution of underwater SLAM began in the late 1990s with rudimentary sonar-based systems that offered limited accuracy and range. By the early 2000s, researchers started adapting visual SLAM techniques for underwater use, though these were severely constrained by water turbidity and lighting conditions. The mid-2010s saw the integration of multiple sensor modalities, combining acoustic, inertial, and optical data to enhance mapping precision and robustness in varying underwater conditions.
Current underwater SLAM technologies primarily utilize acoustic sensors (side-scan sonar, multibeam echo sounders), optical cameras, and inertial measurement units. These systems must contend with unique challenges including non-uniform lighting, suspended particles, pressure variations, and complex 3D environments with minimal distinguishing features. Additionally, the computational constraints of autonomous underwater vehicles (AUVs) necessitate efficient algorithms that can operate with limited processing power and memory.
The primary objective of underwater SLAM research is to develop algorithms capable of real-time operation in dynamic underwater environments while maintaining localization accuracy within 0.5-1% of distance traveled. This represents a significant improvement over current systems that typically achieve 2-5% accuracy in challenging conditions. Secondary objectives include reducing computational requirements to extend AUV mission duration, enhancing robustness against sensor degradation, and improving feature recognition in feature-poor environments.
From an application perspective, underwater SLAM technologies aim to support critical operations including seabed mapping for geological surveys, underwater infrastructure inspection, marine archaeology, and environmental monitoring. Military applications include mine detection, harbor security, and underwater surveillance. The growing commercial interest in deep-sea mining and offshore energy installations has further accelerated demand for precise underwater mapping capabilities.
The technological trajectory suggests that future underwater SLAM systems will increasingly incorporate machine learning techniques for improved feature extraction and scene understanding, while also developing more sophisticated sensor fusion algorithms to maximize information utilization from multiple data sources. The ultimate goal remains developing fully autonomous underwater navigation systems capable of extended missions without surface communication or human intervention.
The evolution of underwater SLAM began in the late 1990s with rudimentary sonar-based systems that offered limited accuracy and range. By the early 2000s, researchers started adapting visual SLAM techniques for underwater use, though these were severely constrained by water turbidity and lighting conditions. The mid-2010s saw the integration of multiple sensor modalities, combining acoustic, inertial, and optical data to enhance mapping precision and robustness in varying underwater conditions.
Current underwater SLAM technologies primarily utilize acoustic sensors (side-scan sonar, multibeam echo sounders), optical cameras, and inertial measurement units. These systems must contend with unique challenges including non-uniform lighting, suspended particles, pressure variations, and complex 3D environments with minimal distinguishing features. Additionally, the computational constraints of autonomous underwater vehicles (AUVs) necessitate efficient algorithms that can operate with limited processing power and memory.
The primary objective of underwater SLAM research is to develop algorithms capable of real-time operation in dynamic underwater environments while maintaining localization accuracy within 0.5-1% of distance traveled. This represents a significant improvement over current systems that typically achieve 2-5% accuracy in challenging conditions. Secondary objectives include reducing computational requirements to extend AUV mission duration, enhancing robustness against sensor degradation, and improving feature recognition in feature-poor environments.
From an application perspective, underwater SLAM technologies aim to support critical operations including seabed mapping for geological surveys, underwater infrastructure inspection, marine archaeology, and environmental monitoring. Military applications include mine detection, harbor security, and underwater surveillance. The growing commercial interest in deep-sea mining and offshore energy installations has further accelerated demand for precise underwater mapping capabilities.
The technological trajectory suggests that future underwater SLAM systems will increasingly incorporate machine learning techniques for improved feature extraction and scene understanding, while also developing more sophisticated sensor fusion algorithms to maximize information utilization from multiple data sources. The ultimate goal remains developing fully autonomous underwater navigation systems capable of extended missions without surface communication or human intervention.
Market Analysis for Underwater Robotics SLAM Solutions
The underwater robotics market is experiencing significant growth, driven by increasing applications in offshore oil and gas, marine research, defense, and underwater infrastructure inspection. The global underwater robotics market was valued at approximately $3.5 billion in 2022 and is projected to reach $7.4 billion by 2027, growing at a CAGR of 16.2%. Within this broader market, SLAM-enabled solutions represent a rapidly expanding segment due to their critical role in autonomous navigation and mapping capabilities.
The demand for underwater SLAM solutions is primarily fueled by the need for more precise navigation in GPS-denied underwater environments. Traditional underwater navigation methods using acoustic positioning systems or dead reckoning suffer from cumulative errors and limited accuracy, creating substantial market opportunities for advanced SLAM technologies that can provide centimeter-level positioning accuracy.
Commercial sectors, particularly offshore energy, represent the largest market segment for underwater SLAM solutions. Oil and gas companies are increasingly deploying autonomous underwater vehicles (AUVs) equipped with SLAM capabilities for pipeline inspection, seabed mapping, and infrastructure monitoring, reducing operational costs by up to 40% compared to traditional methods involving human divers or remotely operated vehicles.
The scientific research sector constitutes another significant market, with oceanographic institutions and marine biology research centers adopting SLAM-enabled underwater robots for habitat mapping, species monitoring, and climate change studies. This segment is expected to grow at 18.7% annually through 2027, outpacing the overall market growth rate.
Defense and security applications form a premium segment with higher margins but more specialized requirements. Naval forces worldwide are investing in SLAM-equipped AUVs for mine countermeasures, harbor security, and intelligence gathering, with annual procurement budgets exceeding $500 million collectively across major naval powers.
Geographically, North America currently leads the market with approximately 38% share, followed by Europe (27%) and Asia-Pacific (24%). However, the Asia-Pacific region is projected to witness the fastest growth at 20.3% CAGR, driven by increasing maritime activities in China, Japan, South Korea, and Australia.
The underwater SLAM solutions market faces certain constraints, including high development costs, technical challenges related to underwater sensor limitations, and regulatory hurdles. Despite these challenges, the market outlook remains highly positive, with emerging applications in underwater archaeology, aquaculture monitoring, and deep-sea mining expected to create new revenue streams for solution providers in the coming years.
The demand for underwater SLAM solutions is primarily fueled by the need for more precise navigation in GPS-denied underwater environments. Traditional underwater navigation methods using acoustic positioning systems or dead reckoning suffer from cumulative errors and limited accuracy, creating substantial market opportunities for advanced SLAM technologies that can provide centimeter-level positioning accuracy.
Commercial sectors, particularly offshore energy, represent the largest market segment for underwater SLAM solutions. Oil and gas companies are increasingly deploying autonomous underwater vehicles (AUVs) equipped with SLAM capabilities for pipeline inspection, seabed mapping, and infrastructure monitoring, reducing operational costs by up to 40% compared to traditional methods involving human divers or remotely operated vehicles.
The scientific research sector constitutes another significant market, with oceanographic institutions and marine biology research centers adopting SLAM-enabled underwater robots for habitat mapping, species monitoring, and climate change studies. This segment is expected to grow at 18.7% annually through 2027, outpacing the overall market growth rate.
Defense and security applications form a premium segment with higher margins but more specialized requirements. Naval forces worldwide are investing in SLAM-equipped AUVs for mine countermeasures, harbor security, and intelligence gathering, with annual procurement budgets exceeding $500 million collectively across major naval powers.
Geographically, North America currently leads the market with approximately 38% share, followed by Europe (27%) and Asia-Pacific (24%). However, the Asia-Pacific region is projected to witness the fastest growth at 20.3% CAGR, driven by increasing maritime activities in China, Japan, South Korea, and Australia.
The underwater SLAM solutions market faces certain constraints, including high development costs, technical challenges related to underwater sensor limitations, and regulatory hurdles. Despite these challenges, the market outlook remains highly positive, with emerging applications in underwater archaeology, aquaculture monitoring, and deep-sea mining expected to create new revenue streams for solution providers in the coming years.
Current Challenges in Underwater SLAM Implementation
Underwater SLAM implementation faces significant challenges due to the unique characteristics of the marine environment. The most fundamental issue is the limited effectiveness of traditional sensors in underwater conditions. Optical cameras suffer from poor visibility due to light absorption, scattering, and turbidity, while sonar-based systems produce lower resolution data compared to their terrestrial counterparts. This sensor degradation directly impacts feature extraction and matching processes that are essential for accurate SLAM operation.
Navigation accuracy is further compromised by the absence of GPS signals underwater, eliminating a crucial reference point that terrestrial and aerial SLAM systems often rely on. This forces underwater systems to depend entirely on dead reckoning and sensor fusion techniques, which accumulate errors over time without external correction mechanisms.
The dynamic nature of underwater environments presents additional complications. Water currents, varying lighting conditions, and moving objects like marine life create a constantly changing scene that challenges the static world assumptions many SLAM algorithms make. These dynamic elements introduce noise and false positives in feature detection, complicating data association tasks.
Computational constraints represent another significant barrier. Underwater vehicles have limited power resources and processing capabilities due to their sealed nature and operational requirements. This restricts the complexity of algorithms that can be deployed in real-time applications, forcing trade-offs between accuracy and computational efficiency.
Communication limitations further exacerbate these challenges. The restricted bandwidth of underwater acoustic communications makes it difficult to implement multi-robot SLAM or to transmit data to surface stations for processing. This isolation means underwater robots must rely heavily on onboard processing with limited external input.
Loop closure detection, a critical component for correcting accumulated errors in SLAM, becomes particularly difficult underwater due to perceptual aliasing. Many underwater scenes look similar (sandy bottoms, rock formations), making it challenging to definitively identify previously visited locations.
Hardware reliability issues also plague underwater SLAM implementations. Pressure, corrosion, and temperature variations can affect sensor calibration and performance, introducing additional sources of error that must be accounted for in algorithm design.
Finally, the lack of standardized datasets and benchmarks specific to underwater environments hinders comparative evaluation of different approaches. This makes it difficult to objectively assess progress and identify the most promising techniques for specific underwater applications.
Navigation accuracy is further compromised by the absence of GPS signals underwater, eliminating a crucial reference point that terrestrial and aerial SLAM systems often rely on. This forces underwater systems to depend entirely on dead reckoning and sensor fusion techniques, which accumulate errors over time without external correction mechanisms.
The dynamic nature of underwater environments presents additional complications. Water currents, varying lighting conditions, and moving objects like marine life create a constantly changing scene that challenges the static world assumptions many SLAM algorithms make. These dynamic elements introduce noise and false positives in feature detection, complicating data association tasks.
Computational constraints represent another significant barrier. Underwater vehicles have limited power resources and processing capabilities due to their sealed nature and operational requirements. This restricts the complexity of algorithms that can be deployed in real-time applications, forcing trade-offs between accuracy and computational efficiency.
Communication limitations further exacerbate these challenges. The restricted bandwidth of underwater acoustic communications makes it difficult to implement multi-robot SLAM or to transmit data to surface stations for processing. This isolation means underwater robots must rely heavily on onboard processing with limited external input.
Loop closure detection, a critical component for correcting accumulated errors in SLAM, becomes particularly difficult underwater due to perceptual aliasing. Many underwater scenes look similar (sandy bottoms, rock formations), making it challenging to definitively identify previously visited locations.
Hardware reliability issues also plague underwater SLAM implementations. Pressure, corrosion, and temperature variations can affect sensor calibration and performance, introducing additional sources of error that must be accounted for in algorithm design.
Finally, the lack of standardized datasets and benchmarks specific to underwater environments hinders comparative evaluation of different approaches. This makes it difficult to objectively assess progress and identify the most promising techniques for specific underwater applications.
Existing Underwater SLAM Methodologies and Approaches
01 Visual SLAM Algorithms for Navigation and Mapping
Visual SLAM (Simultaneous Localization and Mapping) algorithms use camera data to create maps of unknown environments while simultaneously tracking the position of the device. These algorithms process visual features from images to estimate motion and build 3D representations of surroundings. They are particularly useful in robotics, autonomous vehicles, and augmented reality applications where GPS may be unavailable or unreliable.- Visual SLAM Algorithms for Navigation and Mapping: Visual SLAM (Simultaneous Localization and Mapping) algorithms use camera data to create maps of unknown environments while simultaneously tracking the position of the device. These algorithms process visual features from images to estimate motion and build 3D representations of surroundings. They are particularly useful in robotics, autonomous vehicles, and augmented reality applications where GPS may be unavailable or unreliable. Visual SLAM systems typically include feature detection, tracking, mapping, and loop closure components to ensure accuracy over time.
- LiDAR-based SLAM for Precise Environmental Mapping: LiDAR-based SLAM algorithms utilize laser scanning technology to create precise 3D maps of environments. These systems emit laser pulses and measure the time taken for reflections to return, generating point clouds that represent the surrounding space with high accuracy. LiDAR SLAM is particularly effective in challenging lighting conditions and environments with limited visual features. The algorithms typically incorporate point cloud registration, scan matching, and optimization techniques to align successive scans and build consistent maps, enabling applications in autonomous driving, robotics, and industrial automation.
- Fusion-based SLAM Integrating Multiple Sensors: Fusion-based SLAM algorithms combine data from multiple sensors such as cameras, LiDAR, IMU (Inertial Measurement Unit), and other sensors to improve mapping accuracy and robustness. By leveraging the complementary strengths of different sensor types, these algorithms can overcome limitations of single-sensor approaches, such as visual SLAM's sensitivity to lighting conditions or LiDAR's limited range. Sensor fusion typically employs probabilistic frameworks like Extended Kalman Filters or particle filters to integrate heterogeneous data streams and handle uncertainty, resulting in more reliable localization and mapping in diverse environments.
- Real-time SLAM for Mobile and Embedded Devices: Real-time SLAM algorithms are specifically designed to operate efficiently on resource-constrained platforms such as mobile devices, drones, and embedded systems. These algorithms employ computational optimizations, simplified feature extraction methods, and efficient data structures to achieve acceptable performance despite limited processing power, memory, and energy resources. Techniques such as keyframe selection, local mapping, and parallel processing are commonly used to balance accuracy with computational demands. These systems enable augmented reality applications, indoor navigation, and small-scale robotics to perform localization and mapping without requiring cloud processing or powerful hardware.
- Loop Closure and Global Optimization in SLAM: Loop closure and global optimization techniques are critical components of SLAM algorithms that correct accumulated errors when revisiting previously mapped areas. These methods detect when the system has returned to a known location and use this information to adjust the entire map for consistency. Loop closure typically involves place recognition algorithms to identify revisited locations, followed by pose graph optimization or bundle adjustment to minimize global mapping errors. Advanced approaches incorporate machine learning for robust place recognition and efficient optimization methods to handle large-scale environments, significantly improving the long-term accuracy of SLAM systems in extended operations.
02 LiDAR-based SLAM for Precise Environmental Mapping
LiDAR-based SLAM algorithms utilize laser scanning technology to create highly accurate 3D maps of environments. These systems emit laser pulses and measure the time taken for reflections to return, enabling precise distance calculations. LiDAR SLAM is particularly effective in complex environments and low-light conditions where visual systems may struggle, providing robust mapping solutions for autonomous navigation systems.Expand Specific Solutions03 Fusion-based SLAM Integrating Multiple Sensors
Fusion-based SLAM algorithms combine data from multiple sensor types (cameras, LiDAR, IMU, etc.) to improve accuracy and robustness. By integrating complementary information sources, these systems overcome the limitations of single-sensor approaches. Sensor fusion techniques help handle challenging scenarios like dynamic environments, varying lighting conditions, and feature-poor settings, resulting in more reliable localization and mapping performance.Expand Specific Solutions04 Real-time SLAM for Mobile and Embedded Applications
Real-time SLAM algorithms are optimized for computational efficiency to operate on resource-constrained platforms like mobile devices and embedded systems. These algorithms employ techniques such as keyframe selection, sparse mapping, and parallel processing to reduce computational demands while maintaining acceptable accuracy. They enable applications in mobile augmented reality, handheld scanning devices, and small autonomous robots where processing power and energy consumption are limited.Expand Specific Solutions05 Loop Closure and Global Optimization in SLAM
Loop closure techniques in SLAM algorithms detect when a system revisits previously mapped areas, allowing for correction of accumulated errors. Global optimization methods then adjust the entire map to maintain consistency. These approaches are crucial for building accurate large-scale maps by minimizing drift and ensuring spatial coherence. Advanced loop closure systems use feature matching, geometric verification, and probabilistic frameworks to identify revisited locations reliably even under different viewing conditions.Expand Specific Solutions
Leading Companies and Research Institutions in Underwater SLAM
The underwater SLAM technology market is in an early growth phase, characterized by significant academic research but limited commercial deployment. The market size is expanding as underwater robotics applications increase in offshore energy, marine research, and defense sectors. Academic institutions dominate the technological landscape, with Chinese universities like Zhejiang University, Harbin Engineering University, and Ocean University of China leading research efforts alongside commercial players such as Saab AB, Lockheed Martin, and iRobot. The technology remains in development with challenges in underwater sensing, localization accuracy, and real-time processing. Integration with advanced sonar systems and AI is driving innovation, while collaboration between academic institutions and industry partners is accelerating technology maturation for practical underwater robotic applications.
Zhejiang University
Technical Solution: Zhejiang University has developed a robust underwater SLAM algorithm called UVSLAM (Underwater Visual SLAM) that integrates multiple sensor inputs including stereo cameras, IMU, and pressure sensors to achieve accurate localization in challenging underwater environments. Their approach employs feature-based tracking with adaptive thresholding to handle low-visibility conditions and varying illumination underwater. The system implements a tightly-coupled optimization framework that fuses visual features with inertial measurements, while incorporating depth constraints from pressure sensors to mitigate drift. A key innovation is their underwater-specific loop closure detection that accounts for color distortion and limited visibility range. Their implementation has been tested on autonomous underwater vehicles (AUVs) in both coastal and deep-sea environments, demonstrating centimeter-level accuracy in trajectory estimation and 3D mapping capabilities even in turbid waters[1][3].
Strengths: Superior performance in low-visibility underwater environments through multi-sensor fusion; robust against color distortion and illumination variations common in underwater settings. Weaknesses: Computationally intensive for real-time operation on resource-constrained AUVs; requires careful calibration of multiple sensors which can be challenging in field deployments.
Saab AB
Technical Solution: Saab AB has developed AquaNav, a specialized underwater SLAM solution designed for both military and commercial underwater applications. Their system leverages synthetic aperture sonar (SAS) technology combined with advanced inertial navigation to achieve high-precision underwater localization and mapping. AquaNav employs a unique dual-layer SLAM approach: a fast real-time estimator for immediate navigation needs and a more computationally intensive batch optimization process that runs periodically to refine maps and trajectories. The system incorporates advanced acoustic feature extraction algorithms that can identify and track distinctive seafloor features even in homogeneous environments. Saab's implementation includes a novel "acoustic fingerprinting" technique that creates unique signatures of underwater structures to facilitate loop closure detection. The system has been successfully deployed on Saab's family of AUVs including the Sabertooth hybrid vehicle, demonstrating consistent sub-meter accuracy in extended underwater missions without external references. Field trials in the Baltic Sea and North Sea have validated the system's performance in varying conditions including under-ice operations[6][8].
Strengths: Exceptional sonar-based feature detection even in featureless environments; proven reliability in harsh conditions including under-ice navigation; seamless integration with Saab's underwater vehicle ecosystem. Weaknesses: High initial investment cost; significant power consumption from advanced sonar systems; performance degradation in extremely turbid waters with high acoustic noise.
Key Technical Innovations in Underwater SLAM Algorithms
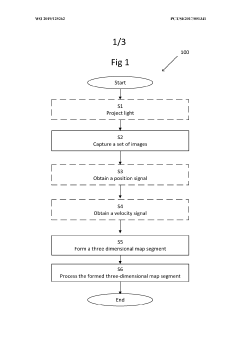
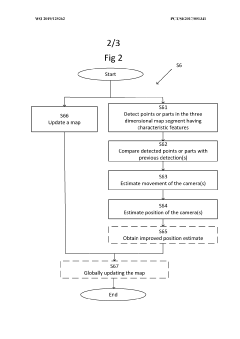
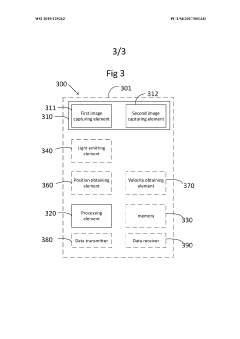
A method and system for simultaneous navigation and mapping of a space
PatentWO2019125262A1
Innovation
- The method employs stereo camera pairs and stereo image processing to capture overlapping images, detect characteristic features, and build a 3D map in real-time, using techniques like Iterative Closest Point (ICP) for global updates and Procrustes analysis to estimate platform movement, while filtering out moving objects and utilizing projected light to enhance feature detection.
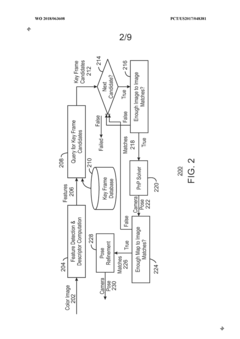
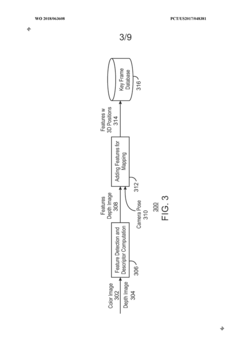
Place recognition algorithm
PatentWO2018063608A1
Innovation
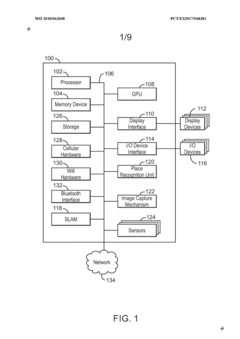
- A place recognition algorithm that extracts a smaller subset of candidate key frames and performs pair-wise matching using a two-stage process, relying solely on image content for key frame addition, enabling real-time camera pose determination by employing ORB binary features and a hierarchical bag-of-words model.
Environmental Impact Assessment of Underwater Robotics
The deployment of underwater robotics equipped with SLAM (Simultaneous Localization and Mapping) algorithms necessitates careful consideration of their environmental impact. These technologies, while offering significant benefits for underwater exploration and research, interact with delicate marine ecosystems in ways that require thorough assessment.
Primary environmental concerns include physical disturbance to benthic habitats during robot navigation and mapping operations. SLAM-equipped underwater vehicles can inadvertently damage coral reefs, seagrass beds, and other sensitive habitats through direct contact or sediment disturbance. The extent of this impact varies significantly based on the robot's size, propulsion system, and operational patterns dictated by the SLAM algorithm's navigation requirements.
Acoustic emissions represent another significant environmental consideration. Many underwater SLAM systems rely on sonar technology for mapping and localization, generating sound waves that may affect marine fauna. Research indicates that certain marine mammals, particularly cetaceans, can experience behavioral changes and communication disruptions when exposed to artificial acoustic signals within their frequency ranges. SLAM algorithms that minimize unnecessary sonar pinging or operate at frequencies less disruptive to marine life demonstrate reduced ecological impact.
Electromagnetic fields generated by underwater robotic systems present additional environmental concerns. While SLAM algorithms themselves do not directly produce electromagnetic radiation, the sensors and communication systems they utilize do. These fields may interfere with the navigation abilities of electrosensitive species such as sharks and rays, potentially disrupting their natural behaviors and migration patterns.
Energy consumption patterns of SLAM implementations also merit environmental consideration. More efficient algorithms that optimize path planning and sensor usage can significantly reduce the power requirements of underwater robots, thereby extending mission duration while minimizing the environmental footprint associated with battery production and disposal. Recent advancements in energy-efficient SLAM approaches have demonstrated up to 30% reduction in power consumption compared to traditional methods.
Chemical contamination risks, though minimal with modern underwater robotics, cannot be overlooked. Potential leakage of hydraulic fluids, lubricants, or battery components poses threats to water quality and marine organisms. SLAM systems that enable more precise navigation and obstacle avoidance can reduce collision incidents that might lead to such contamination events.
Long-term ecological monitoring studies suggest that adaptive SLAM algorithms, which can recognize environmentally sensitive areas and modify robot behavior accordingly, offer promising approaches to mitigating negative impacts while maintaining operational effectiveness. These "eco-aware" SLAM implementations represent an emerging frontier in environmentally responsible underwater robotics deployment.
Primary environmental concerns include physical disturbance to benthic habitats during robot navigation and mapping operations. SLAM-equipped underwater vehicles can inadvertently damage coral reefs, seagrass beds, and other sensitive habitats through direct contact or sediment disturbance. The extent of this impact varies significantly based on the robot's size, propulsion system, and operational patterns dictated by the SLAM algorithm's navigation requirements.
Acoustic emissions represent another significant environmental consideration. Many underwater SLAM systems rely on sonar technology for mapping and localization, generating sound waves that may affect marine fauna. Research indicates that certain marine mammals, particularly cetaceans, can experience behavioral changes and communication disruptions when exposed to artificial acoustic signals within their frequency ranges. SLAM algorithms that minimize unnecessary sonar pinging or operate at frequencies less disruptive to marine life demonstrate reduced ecological impact.
Electromagnetic fields generated by underwater robotic systems present additional environmental concerns. While SLAM algorithms themselves do not directly produce electromagnetic radiation, the sensors and communication systems they utilize do. These fields may interfere with the navigation abilities of electrosensitive species such as sharks and rays, potentially disrupting their natural behaviors and migration patterns.
Energy consumption patterns of SLAM implementations also merit environmental consideration. More efficient algorithms that optimize path planning and sensor usage can significantly reduce the power requirements of underwater robots, thereby extending mission duration while minimizing the environmental footprint associated with battery production and disposal. Recent advancements in energy-efficient SLAM approaches have demonstrated up to 30% reduction in power consumption compared to traditional methods.
Chemical contamination risks, though minimal with modern underwater robotics, cannot be overlooked. Potential leakage of hydraulic fluids, lubricants, or battery components poses threats to water quality and marine organisms. SLAM systems that enable more precise navigation and obstacle avoidance can reduce collision incidents that might lead to such contamination events.
Long-term ecological monitoring studies suggest that adaptive SLAM algorithms, which can recognize environmentally sensitive areas and modify robot behavior accordingly, offer promising approaches to mitigating negative impacts while maintaining operational effectiveness. These "eco-aware" SLAM implementations represent an emerging frontier in environmentally responsible underwater robotics deployment.
Hardware Integration Challenges for Underwater SLAM Systems
The integration of hardware components for underwater SLAM systems presents unique challenges that significantly impact system performance and reliability. Underwater environments impose severe constraints on sensor selection and deployment due to the physical properties of water. Acoustic sensors, while effective for long-range detection in turbid waters, suffer from low update rates (typically 1-10 Hz) and resolution limitations, creating difficulties in real-time mapping applications. Optical sensors, conversely, offer higher resolution but are severely limited by water turbidity, with effective ranges often restricted to less than 10 meters in optimal conditions.
Power management represents another critical challenge, as underwater vehicles must operate with limited battery capacity. SLAM algorithms are computationally intensive, requiring substantial processing power that directly conflicts with the energy constraints of autonomous underwater vehicles (AUVs). This necessitates careful hardware-software co-design to optimize power consumption without compromising computational capabilities.
Pressure resistance and waterproofing add another layer of complexity, requiring specialized housing for all electronic components. These protective measures often increase the weight and size of the system, affecting the vehicle's maneuverability and operational duration. The additional weight necessitates more powerful propulsion systems, further straining the already limited power resources.
Communication bandwidth limitations pose significant obstacles for multi-robot SLAM implementations. Underwater acoustic communication typically offers bandwidth between 5-50 kbps, orders of magnitude lower than terrestrial wireless systems. This restriction severely impacts the ability to share map data between vehicles or with surface stations, limiting collaborative mapping capabilities.
Sensor synchronization presents technical difficulties unique to underwater environments. The varying propagation speeds of different signals (light, sound, electromagnetic) in water create temporal alignment challenges when fusing data from heterogeneous sensors. Without precise time synchronization, the accuracy of the generated maps deteriorates significantly.
Hardware miniaturization remains an ongoing challenge, particularly for smaller underwater robots. The trade-off between size, power, and computational capability becomes more pronounced as vehicle dimensions decrease. Current embedded systems capable of running sophisticated SLAM algorithms often exceed the size and power budgets of micro-scale underwater vehicles.
Reliability concerns are amplified in underwater deployments, where hardware failures can lead to complete mission abortion and potential loss of expensive equipment. The corrosive nature of saltwater and extreme pressure conditions accelerate component degradation, necessitating redundant systems and robust failure detection mechanisms that add further complexity to hardware integration.
Power management represents another critical challenge, as underwater vehicles must operate with limited battery capacity. SLAM algorithms are computationally intensive, requiring substantial processing power that directly conflicts with the energy constraints of autonomous underwater vehicles (AUVs). This necessitates careful hardware-software co-design to optimize power consumption without compromising computational capabilities.
Pressure resistance and waterproofing add another layer of complexity, requiring specialized housing for all electronic components. These protective measures often increase the weight and size of the system, affecting the vehicle's maneuverability and operational duration. The additional weight necessitates more powerful propulsion systems, further straining the already limited power resources.
Communication bandwidth limitations pose significant obstacles for multi-robot SLAM implementations. Underwater acoustic communication typically offers bandwidth between 5-50 kbps, orders of magnitude lower than terrestrial wireless systems. This restriction severely impacts the ability to share map data between vehicles or with surface stations, limiting collaborative mapping capabilities.
Sensor synchronization presents technical difficulties unique to underwater environments. The varying propagation speeds of different signals (light, sound, electromagnetic) in water create temporal alignment challenges when fusing data from heterogeneous sensors. Without precise time synchronization, the accuracy of the generated maps deteriorates significantly.
Hardware miniaturization remains an ongoing challenge, particularly for smaller underwater robots. The trade-off between size, power, and computational capability becomes more pronounced as vehicle dimensions decrease. Current embedded systems capable of running sophisticated SLAM algorithms often exceed the size and power budgets of micro-scale underwater vehicles.
Reliability concerns are amplified in underwater deployments, where hardware failures can lead to complete mission abortion and potential loss of expensive equipment. The corrosive nature of saltwater and extreme pressure conditions accelerate component degradation, necessitating redundant systems and robust failure detection mechanisms that add further complexity to hardware integration.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!