

Why SLAM Is Essential For Navigation Without GPS?
SEP 12, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Technology Evolution and Navigation Goals
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly over the past three decades, transforming from theoretical concepts to practical applications across multiple industries. The evolution began in the early 1990s with seminal papers establishing mathematical frameworks for robots to simultaneously build maps and locate themselves within unknown environments. This represented a fundamental shift from traditional navigation methods that relied heavily on pre-existing maps or external positioning systems like GPS.
The technological progression of SLAM has been marked by several distinct phases. Initially, filter-based approaches such as Extended Kalman Filters dominated the field, offering probabilistic solutions to the inherent uncertainty in sensor measurements. By the mid-2000s, graph-based optimization techniques emerged, providing more accurate results by considering the entire trajectory history rather than just the current state. The introduction of visual SLAM algorithms around 2010 expanded capabilities beyond laser-based systems, enabling navigation using camera sensors alone.
Recent advancements have focused on real-time performance, robust operation in dynamic environments, and integration with deep learning techniques. Modern SLAM systems can now function effectively in challenging conditions including low-light environments, featureless spaces, and areas with moving objects—situations where earlier iterations would fail. This resilience makes SLAM increasingly valuable for GPS-denied environments such as indoor spaces, urban canyons, underwater locations, and even extraterrestrial exploration.
The primary goal of SLAM technology in navigation contexts is to provide continuous, accurate positioning without reliance on external infrastructure. This autonomy is crucial for applications ranging from search and rescue operations in disaster zones to autonomous vehicle navigation in underground parking structures. Unlike GPS, which requires line-of-sight to satellites and suffers from signal degradation in many environments, SLAM creates its own reference framework through environmental observation.
Another key objective is achieving persistent navigation—maintaining localization accuracy over extended periods and distances without drift accumulation. This remains challenging but has seen significant improvement through loop closure detection and global optimization techniques. The integration of multiple sensor modalities (sensor fusion) has further enhanced robustness, allowing systems to compensate for individual sensor limitations.
Looking forward, SLAM technology aims to achieve human-like spatial understanding, moving beyond geometric mapping to semantic comprehension of environments. This includes recognizing objects, understanding spatial relationships, and predicting dynamic elements—capabilities essential for truly autonomous navigation in complex, unpredictable real-world settings where GPS alone is insufficient or unavailable.
The technological progression of SLAM has been marked by several distinct phases. Initially, filter-based approaches such as Extended Kalman Filters dominated the field, offering probabilistic solutions to the inherent uncertainty in sensor measurements. By the mid-2000s, graph-based optimization techniques emerged, providing more accurate results by considering the entire trajectory history rather than just the current state. The introduction of visual SLAM algorithms around 2010 expanded capabilities beyond laser-based systems, enabling navigation using camera sensors alone.
Recent advancements have focused on real-time performance, robust operation in dynamic environments, and integration with deep learning techniques. Modern SLAM systems can now function effectively in challenging conditions including low-light environments, featureless spaces, and areas with moving objects—situations where earlier iterations would fail. This resilience makes SLAM increasingly valuable for GPS-denied environments such as indoor spaces, urban canyons, underwater locations, and even extraterrestrial exploration.
The primary goal of SLAM technology in navigation contexts is to provide continuous, accurate positioning without reliance on external infrastructure. This autonomy is crucial for applications ranging from search and rescue operations in disaster zones to autonomous vehicle navigation in underground parking structures. Unlike GPS, which requires line-of-sight to satellites and suffers from signal degradation in many environments, SLAM creates its own reference framework through environmental observation.
Another key objective is achieving persistent navigation—maintaining localization accuracy over extended periods and distances without drift accumulation. This remains challenging but has seen significant improvement through loop closure detection and global optimization techniques. The integration of multiple sensor modalities (sensor fusion) has further enhanced robustness, allowing systems to compensate for individual sensor limitations.
Looking forward, SLAM technology aims to achieve human-like spatial understanding, moving beyond geometric mapping to semantic comprehension of environments. This includes recognizing objects, understanding spatial relationships, and predicting dynamic elements—capabilities essential for truly autonomous navigation in complex, unpredictable real-world settings where GPS alone is insufficient or unavailable.
Market Demand for GPS-Independent Navigation Systems
The global market for GPS-independent navigation systems is experiencing unprecedented growth, driven by the increasing limitations of traditional GPS technology in various environments. Current market analysis indicates a robust demand across multiple sectors, with autonomous vehicles, robotics, and indoor navigation leading the adoption curve. The autonomous vehicle market alone is projected to reach $556.67 billion by 2026, with navigation systems being a critical component of this growth trajectory.
Indoor environments, where GPS signals are notoriously unreliable, represent a particularly significant market opportunity. Retail analytics firms estimate that indoor positioning systems will see a compound annual growth rate of 27.9% through 2025, as businesses seek to enhance customer experiences and operational efficiency in spaces where GPS cannot function effectively.
Military and defense sectors continue to be major drivers of GPS-independent navigation technology adoption. These organizations require reliable navigation capabilities in GPS-denied environments such as urban canyons, dense forests, underground facilities, and areas experiencing signal jamming. Defense budgets worldwide increasingly allocate resources specifically for developing resilient navigation technologies that can operate without satellite dependency.
The industrial robotics sector presents another substantial market for SLAM-based navigation systems. With the global industrial robotics market expected to reach $75.6 billion by 2027, manufacturers are increasingly demanding robots that can navigate autonomously through complex factory environments without relying on external positioning infrastructure.
Consumer applications are also emerging as a significant market segment. From augmented reality gaming to indoor wayfinding in shopping malls and airports, end-users are demanding seamless navigation experiences regardless of GPS availability. Market research indicates that consumers are willing to pay premium prices for devices and applications that offer uninterrupted positioning services.
Urban development trends further amplify the demand for GPS-independent navigation. As cities become denser and more vertical, traditional GPS systems struggle with accuracy in urban canyons created by tall buildings. Urban mobility solutions, including autonomous public transportation and last-mile delivery robots, require alternative navigation technologies to function reliably in these challenging environments.
Emergency services represent another critical market segment with specific requirements for GPS-independent navigation. First responders need reliable positioning systems when operating in disaster zones, burning buildings, or underground structures where satellite signals are compromised or entirely absent. This life-critical application drives demand for highly reliable SLAM-based navigation solutions.
Indoor environments, where GPS signals are notoriously unreliable, represent a particularly significant market opportunity. Retail analytics firms estimate that indoor positioning systems will see a compound annual growth rate of 27.9% through 2025, as businesses seek to enhance customer experiences and operational efficiency in spaces where GPS cannot function effectively.
Military and defense sectors continue to be major drivers of GPS-independent navigation technology adoption. These organizations require reliable navigation capabilities in GPS-denied environments such as urban canyons, dense forests, underground facilities, and areas experiencing signal jamming. Defense budgets worldwide increasingly allocate resources specifically for developing resilient navigation technologies that can operate without satellite dependency.
The industrial robotics sector presents another substantial market for SLAM-based navigation systems. With the global industrial robotics market expected to reach $75.6 billion by 2027, manufacturers are increasingly demanding robots that can navigate autonomously through complex factory environments without relying on external positioning infrastructure.
Consumer applications are also emerging as a significant market segment. From augmented reality gaming to indoor wayfinding in shopping malls and airports, end-users are demanding seamless navigation experiences regardless of GPS availability. Market research indicates that consumers are willing to pay premium prices for devices and applications that offer uninterrupted positioning services.
Urban development trends further amplify the demand for GPS-independent navigation. As cities become denser and more vertical, traditional GPS systems struggle with accuracy in urban canyons created by tall buildings. Urban mobility solutions, including autonomous public transportation and last-mile delivery robots, require alternative navigation technologies to function reliably in these challenging environments.
Emergency services represent another critical market segment with specific requirements for GPS-independent navigation. First responders need reliable positioning systems when operating in disaster zones, burning buildings, or underground structures where satellite signals are compromised or entirely absent. This life-critical application drives demand for highly reliable SLAM-based navigation solutions.
Current SLAM Implementations and Technical Challenges
SLAM technology has evolved significantly over the past decade, with various implementations now deployed across industries. Visual SLAM systems, which rely primarily on camera data, have gained prominence in applications ranging from augmented reality to autonomous vehicles. Notable implementations include ORB-SLAM, which utilizes feature detection for robust mapping, and Direct Sparse Odometry (DSO), which processes pixel intensity values directly for more efficient processing. These systems have demonstrated impressive performance in controlled environments but still struggle with dynamic scenes and varying lighting conditions.
LiDAR-based SLAM implementations have become increasingly popular due to their precision in depth measurement. Systems like Google's Cartographer and LOAM (LiDAR Odometry and Mapping) provide accurate 3D reconstructions of environments, making them suitable for robotics and autonomous navigation. These implementations excel in feature-rich environments but face challenges in featureless areas such as long corridors or open spaces where geometric distinctiveness is limited.
Multi-sensor fusion SLAM represents the current state-of-the-art, combining data from cameras, LiDAR, IMUs, and other sensors to overcome the limitations of single-sensor approaches. RTAB-Map and Kimera are prominent examples that demonstrate enhanced robustness across diverse environments. However, these systems face significant computational demands and complex calibration requirements that limit their deployment on resource-constrained platforms.
Despite advancements, current SLAM implementations face several persistent technical challenges. Loop closure detection remains problematic, particularly in environments with repetitive features or when revisiting locations from different perspectives. Failures in loop closure can lead to map inconsistencies and drift accumulation over time, compromising navigation reliability.
Computational efficiency presents another significant hurdle, especially for real-time applications on mobile or embedded devices. Most sophisticated SLAM algorithms require substantial processing power, creating a trade-off between accuracy and operational constraints. This challenge is particularly acute for consumer applications where power consumption and hardware costs are critical considerations.
Dynamic environment handling continues to challenge SLAM systems. Most algorithms assume static scenes, struggling to differentiate between movable objects and permanent structures. This limitation becomes particularly problematic in crowded spaces or environments with frequent changes, where the system may incorporate temporary obstacles into permanent maps or fail to recognize environmental modifications.
Scale consistency and global localization without prior maps represent additional technical barriers. Many visual SLAM systems struggle with absolute scale determination without supplementary sensors, while establishing global position remains challenging without external references like GPS. These limitations restrict the deployment of SLAM in applications requiring precise global positioning or seamless indoor-outdoor transitions.
LiDAR-based SLAM implementations have become increasingly popular due to their precision in depth measurement. Systems like Google's Cartographer and LOAM (LiDAR Odometry and Mapping) provide accurate 3D reconstructions of environments, making them suitable for robotics and autonomous navigation. These implementations excel in feature-rich environments but face challenges in featureless areas such as long corridors or open spaces where geometric distinctiveness is limited.
Multi-sensor fusion SLAM represents the current state-of-the-art, combining data from cameras, LiDAR, IMUs, and other sensors to overcome the limitations of single-sensor approaches. RTAB-Map and Kimera are prominent examples that demonstrate enhanced robustness across diverse environments. However, these systems face significant computational demands and complex calibration requirements that limit their deployment on resource-constrained platforms.
Despite advancements, current SLAM implementations face several persistent technical challenges. Loop closure detection remains problematic, particularly in environments with repetitive features or when revisiting locations from different perspectives. Failures in loop closure can lead to map inconsistencies and drift accumulation over time, compromising navigation reliability.
Computational efficiency presents another significant hurdle, especially for real-time applications on mobile or embedded devices. Most sophisticated SLAM algorithms require substantial processing power, creating a trade-off between accuracy and operational constraints. This challenge is particularly acute for consumer applications where power consumption and hardware costs are critical considerations.
Dynamic environment handling continues to challenge SLAM systems. Most algorithms assume static scenes, struggling to differentiate between movable objects and permanent structures. This limitation becomes particularly problematic in crowded spaces or environments with frequent changes, where the system may incorporate temporary obstacles into permanent maps or fail to recognize environmental modifications.
Scale consistency and global localization without prior maps represent additional technical barriers. Many visual SLAM systems struggle with absolute scale determination without supplementary sensors, while establishing global position remains challenging without external references like GPS. These limitations restrict the deployment of SLAM in applications requiring precise global positioning or seamless indoor-outdoor transitions.
Existing SLAM Algorithms and Sensor Fusion Approaches
01 Visual SLAM techniques for indoor navigation
Visual SLAM techniques utilize cameras and image processing algorithms to create maps and determine position in indoor environments where GPS signals are unavailable. These systems analyze visual features from the environment to build 3D maps while simultaneously tracking the device's position within that map. Advanced algorithms can detect and match features across image frames to estimate movement and update location information in real-time, making them suitable for robots, drones, and AR applications operating indoors.- Visual SLAM techniques for indoor navigation: Visual SLAM techniques utilize cameras and image processing algorithms to create maps and determine position in indoor environments where GPS signals are unavailable. These systems analyze visual features from the environment to build 3D maps while simultaneously tracking the device's position within that map. Advanced computer vision algorithms enable real-time feature detection, matching, and tracking to maintain accurate localization even during movement.
- LiDAR-based SLAM for accurate mapping: LiDAR sensors provide precise distance measurements that enable highly accurate SLAM implementations without relying on GPS. These systems emit laser pulses and measure the time taken for reflections to return, creating detailed point clouds of the environment. LiDAR-based SLAM solutions are particularly effective in dynamic environments and low-light conditions where visual systems may struggle, offering robust mapping capabilities for autonomous navigation systems.
- Sensor fusion approaches for robust SLAM: Combining multiple sensor types (cameras, LiDAR, IMU, wheel encoders) creates more robust SLAM systems that can operate reliably without GPS. Sensor fusion algorithms integrate data from different sources to compensate for individual sensor limitations. These approaches typically employ probabilistic methods like Kalman filters or particle filters to merge sensor data and maintain accurate position estimates even when individual sensors provide degraded information.
- Deep learning enhanced SLAM solutions: Machine learning and deep neural networks are being integrated into SLAM systems to improve feature detection, object recognition, and mapping accuracy in GPS-denied environments. These approaches can learn to identify and track landmarks more effectively than traditional computer vision methods. Deep learning models help SLAM systems better understand complex environments, predict motion patterns, and adapt to changing conditions, resulting in more reliable navigation without GPS.
- SLAM optimization for resource-constrained devices: Specialized algorithms and techniques have been developed to implement efficient SLAM on devices with limited computational resources. These optimizations include sparse mapping approaches, keyframe selection strategies, and lightweight feature descriptors. By reducing computational demands while maintaining sufficient accuracy, these methods enable SLAM-based navigation without GPS on mobile robots, drones, and other platforms with constrained processing capabilities.
02 LiDAR-based SLAM for accurate mapping
LiDAR sensors provide precise distance measurements by emitting laser pulses and measuring their return time, enabling accurate environment mapping without GPS dependency. LiDAR-based SLAM systems can create detailed point clouds of surroundings, detect obstacles, and navigate through complex environments. These systems are particularly effective in low-light conditions where visual systems might struggle, offering robust navigation capabilities for autonomous vehicles and robots in GPS-denied environments.Expand Specific Solutions03 Sensor fusion approaches for robust SLAM
Sensor fusion combines data from multiple sensors such as cameras, LiDAR, IMUs, and wheel encoders to improve SLAM accuracy and reliability. By integrating complementary sensor information, these systems can overcome limitations of individual sensors, providing more robust navigation in challenging environments. Advanced filtering algorithms like Extended Kalman Filters or particle filters help process and merge data from different sources, enabling continuous operation even when certain sensors face temporary limitations or environmental challenges.Expand Specific Solutions04 AI and deep learning enhanced SLAM
Artificial intelligence and deep learning techniques are being integrated into SLAM systems to improve feature detection, object recognition, and mapping capabilities. Neural networks can be trained to recognize environmental patterns, predict movement, and enhance localization accuracy without GPS. These AI-enhanced systems can better handle dynamic environments, changing lighting conditions, and complex scenes by learning from experience and adapting to new situations, significantly improving navigation performance in GPS-denied environments.Expand Specific Solutions05 Edge computing for real-time SLAM processing
Edge computing architectures enable real-time SLAM processing by performing computations directly on the device rather than relying on cloud connectivity. These systems optimize algorithms for resource-constrained devices while maintaining navigation accuracy without GPS. By processing sensor data locally, edge-based SLAM reduces latency, improves response time, and enables operation in areas without network connectivity. This approach is particularly valuable for autonomous mobile robots, drones, and AR devices that require immediate navigation decisions in GPS-denied environments.Expand Specific Solutions
Leading SLAM Technology Companies and Research Institutions
SLAM (Simultaneous Localization and Mapping) technology is currently in a growth phase, with the global market expected to reach $3-5 billion by 2025. The technology has evolved from experimental to commercially viable, with applications expanding beyond robotics to autonomous vehicles, AR/VR, and indoor navigation. Leading academic institutions like Peking University, Xi'an Jiaotong University, and Southeast University are advancing theoretical frameworks, while companies such as TRX Systems, GoerTek, and UISEE Technologies are commercializing practical applications. The technology maturity varies across sectors - highly developed in industrial robotics but still evolving for consumer applications. Integration with other technologies like AI and sensor fusion represents the next frontier, with Chinese universities and tech companies increasingly prominent in global SLAM research and development.
Honeywell International Technologies Ltd.
Technical Solution: Honeywell has developed a sophisticated SLAM technology platform called "InSight" specifically designed for GPS-denied navigation in industrial and commercial environments. Their solution integrates multiple sensing modalities including inertial measurement units, barometric pressure sensors, magnetometers, and infrared cameras to create a comprehensive environmental mapping and positioning system. Honeywell's approach emphasizes reliability in challenging indoor environments where traditional navigation methods fail. The InSight system employs proprietary sensor fusion algorithms that dynamically adjust weighting factors based on environmental conditions and sensor confidence levels. Honeywell has implemented a distributed SLAM architecture that allows multiple devices to contribute to a shared environmental map, enabling collaborative navigation and improved accuracy through consensus-based corrections. Their technology incorporates machine learning techniques to identify and classify environmental features, facilitating more intelligent path planning and obstacle avoidance. The system has been successfully deployed in applications ranging from warehouse automation to emergency responder tracking in buildings where GPS signals are unavailable.
Strengths: Honeywell's extensive experience in industrial automation provides deep domain expertise for specialized applications. Their distributed architecture enables scalable deployment across multiple devices with improved collective accuracy. Weaknesses: The system requires significant initial calibration for optimal performance in new environments. Higher power consumption compared to simpler solutions limits deployment in extremely power-constrained applications.
TRX Systems, Inc.
Technical Solution: TRX Systems has developed NEON, a specialized SLAM-based indoor positioning solution designed specifically for GPS-denied environments. Their technology focuses on personnel tracking and navigation in challenging settings such as multi-story buildings, underground facilities, and dense urban environments. NEON employs a sophisticated sensor fusion approach that integrates inertial navigation systems (INS), barometric pressure sensors, and magnetic field mapping to create accurate 3D positioning without relying on external infrastructure. TRX's proprietary algorithms compensate for sensor drift through advanced error modeling and correction techniques, enabling extended operation periods without position degradation. The system incorporates building information models (BIM) and floorplans when available, but can also operate in completely unmapped environments through its SLAM capabilities. TRX has developed specialized mapping techniques that identify unique environmental signatures to aid in location recognition and loop closure. Their solution includes cloud-based processing for complex calculations while maintaining critical navigation functions on edge devices, creating a balanced approach to resource utilization. NEON has been deployed by military, first responder, and industrial customers for personnel tracking in hazardous and GPS-denied environments.
Strengths: TRX's specialized focus on personnel tracking has created a highly portable and wearable solution optimized for human movement patterns. Their integration with existing building information models enhances accuracy when such data is available. Weaknesses: The system's accuracy may degrade in environments with significant electromagnetic interference affecting magnetic sensors. Limited processing power in wearable form factors restricts the complexity of SLAM algorithms that can be deployed.
Key SLAM Patents and Research Breakthroughs
procedures FOR SIMULTANEOUS LOCATION AND IMAGE
PatentActiveDE102019220616A1
Innovation
- A SLAM method that continuously detects the environment, classifies surrounding objects as moving or static, and filters out information related to moving objects using a SLAM algorithm to enhance positioning precision.
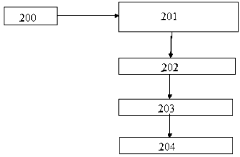
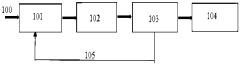
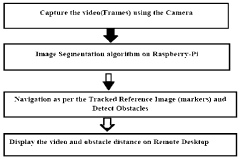
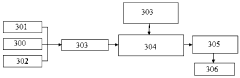
A simultaneous location and mapping based autonomous navigation system
PatentActiveZA202108148A
Innovation
- A simultaneous location and mapping (SLAM) based autonomous navigation system that uses a combination of sensors and customized software to build a map of an unknown environment while navigating, employing techniques like image segmentation, adaptive fuzzy tracking, and extended Kalman filters to determine robot position and avoid obstacles.
SLAM Applications Across Different Industries
SLAM technology has found diverse applications across multiple industries, transforming operations where GPS navigation is limited or unavailable. In the automotive sector, SLAM enables autonomous vehicles to navigate complex urban environments with precise mapping capabilities, functioning effectively in underground parking structures and tunnels where GPS signals are blocked. These systems combine visual sensors, LiDAR, and radar to create detailed environmental maps that support real-time navigation decisions regardless of GPS availability.
The robotics industry has embraced SLAM as a cornerstone technology for both industrial and consumer applications. Warehouse automation systems utilize SLAM for efficient inventory management and navigation through complex storage facilities. Manufacturing robots employ SLAM to adapt to changing factory floor layouts without requiring fixed infrastructure, significantly enhancing operational flexibility and reducing implementation costs.
In aerospace and defense, SLAM technologies provide critical navigation capabilities for unmanned aerial vehicles (UAVs) operating in GPS-denied environments. Military applications include reconnaissance missions in urban settings, where buildings block satellite signals, and indoor operations where GPS is entirely unavailable. These systems enable precise positioning and mapping in environments previously considered too challenging for autonomous navigation.
The mining industry has implemented SLAM solutions to enhance safety and efficiency in underground operations. Autonomous mining equipment can navigate complex tunnel systems without GPS dependency, creating accurate maps of previously unexplored areas while monitoring structural changes that might indicate safety concerns. This application has significantly reduced human exposure to hazardous underground conditions.
Healthcare facilities have adopted SLAM for hospital logistics robots that transport supplies, medications, and equipment throughout complex building structures. These robots navigate seamlessly between floors and departments, maintaining positioning accuracy despite the absence of GPS signals indoors. Similar applications extend to hospitality and retail environments, where service robots assist customers and perform routine tasks without relying on external positioning systems.
Virtual and augmented reality applications leverage SLAM to create immersive experiences by accurately mapping physical spaces and overlaying digital content. This technology enables precise tracking of user movements within indoor environments, supporting applications ranging from interactive museum exhibits to industrial training simulations where spatial awareness is critical.
The robotics industry has embraced SLAM as a cornerstone technology for both industrial and consumer applications. Warehouse automation systems utilize SLAM for efficient inventory management and navigation through complex storage facilities. Manufacturing robots employ SLAM to adapt to changing factory floor layouts without requiring fixed infrastructure, significantly enhancing operational flexibility and reducing implementation costs.
In aerospace and defense, SLAM technologies provide critical navigation capabilities for unmanned aerial vehicles (UAVs) operating in GPS-denied environments. Military applications include reconnaissance missions in urban settings, where buildings block satellite signals, and indoor operations where GPS is entirely unavailable. These systems enable precise positioning and mapping in environments previously considered too challenging for autonomous navigation.
The mining industry has implemented SLAM solutions to enhance safety and efficiency in underground operations. Autonomous mining equipment can navigate complex tunnel systems without GPS dependency, creating accurate maps of previously unexplored areas while monitoring structural changes that might indicate safety concerns. This application has significantly reduced human exposure to hazardous underground conditions.
Healthcare facilities have adopted SLAM for hospital logistics robots that transport supplies, medications, and equipment throughout complex building structures. These robots navigate seamlessly between floors and departments, maintaining positioning accuracy despite the absence of GPS signals indoors. Similar applications extend to hospitality and retail environments, where service robots assist customers and perform routine tasks without relying on external positioning systems.
Virtual and augmented reality applications leverage SLAM to create immersive experiences by accurately mapping physical spaces and overlaying digital content. This technology enables precise tracking of user movements within indoor environments, supporting applications ranging from interactive museum exhibits to industrial training simulations where spatial awareness is critical.
Hardware Requirements for Effective SLAM Implementation
Effective SLAM implementation requires a carefully selected hardware ecosystem that balances performance, power consumption, and cost considerations. At the core of any SLAM system is the sensor suite, which typically includes visual sensors (monocular, stereo, or RGB-D cameras), LiDAR sensors, inertial measurement units (IMUs), and occasionally ultrasonic or infrared sensors. The selection of these sensors depends on the operational environment, with visual sensors being cost-effective but susceptible to lighting conditions, while LiDAR offers superior accuracy but at higher costs and power requirements.
Processing hardware represents another critical component, as SLAM algorithms demand significant computational resources. High-performance computing platforms such as NVIDIA Jetson series, Intel NUC, or dedicated FPGA solutions provide the necessary processing power for real-time SLAM operations. For more constrained applications, optimized embedded systems like Raspberry Pi with appropriate co-processors can be utilized, though with performance limitations.
Memory requirements for SLAM systems are substantial, particularly for map storage and retrieval operations. Systems typically require a minimum of 4GB RAM for basic functionality, with 8GB or more recommended for complex environments or long-duration operations. Storage requirements scale with map complexity and mission duration, necessitating fast read/write capabilities for real-time performance.
Power management systems must be designed to support extended operation, especially for mobile robots or drones implementing SLAM. Battery capacity, voltage regulation, and power distribution systems must be carefully engineered to ensure consistent performance across all hardware components while maximizing operational duration.
Communication infrastructure is essential for multi-agent SLAM systems or those requiring external processing. Low-latency, high-bandwidth wireless protocols such as Wi-Fi 6, 5G, or dedicated RF solutions enable real-time data transmission between system components or to external processing units.
Physical mounting and calibration mechanisms are often overlooked but critical hardware elements. Sensor positioning must minimize vibration and maintain precise alignment, while calibration hardware ensures accurate sensor fusion. Environmental protection systems are necessary for outdoor or harsh environment deployments, including temperature management, dust protection, and moisture resistance features.
Integration frameworks that enable seamless hardware-software interaction complete the hardware ecosystem, with standardized interfaces like ROS (Robot Operating System) facilitating component interoperability and system scalability as requirements evolve.
Processing hardware represents another critical component, as SLAM algorithms demand significant computational resources. High-performance computing platforms such as NVIDIA Jetson series, Intel NUC, or dedicated FPGA solutions provide the necessary processing power for real-time SLAM operations. For more constrained applications, optimized embedded systems like Raspberry Pi with appropriate co-processors can be utilized, though with performance limitations.
Memory requirements for SLAM systems are substantial, particularly for map storage and retrieval operations. Systems typically require a minimum of 4GB RAM for basic functionality, with 8GB or more recommended for complex environments or long-duration operations. Storage requirements scale with map complexity and mission duration, necessitating fast read/write capabilities for real-time performance.
Power management systems must be designed to support extended operation, especially for mobile robots or drones implementing SLAM. Battery capacity, voltage regulation, and power distribution systems must be carefully engineered to ensure consistent performance across all hardware components while maximizing operational duration.
Communication infrastructure is essential for multi-agent SLAM systems or those requiring external processing. Low-latency, high-bandwidth wireless protocols such as Wi-Fi 6, 5G, or dedicated RF solutions enable real-time data transmission between system components or to external processing units.
Physical mounting and calibration mechanisms are often overlooked but critical hardware elements. Sensor positioning must minimize vibration and maintain precise alignment, while calibration hardware ensures accurate sensor fusion. Environmental protection systems are necessary for outdoor or harsh environment deployments, including temperature management, dust protection, and moisture resistance features.
Integration frameworks that enable seamless hardware-software interaction complete the hardware ecosystem, with standardized interfaces like ROS (Robot Operating System) facilitating component interoperability and system scalability as requirements evolve.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!