

SLAM For Indoor Navigation In Complex Buildings
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Indoor SLAM Technology Evolution and Objectives
Simultaneous Localization and Mapping (SLAM) technology has evolved significantly over the past three decades, transforming from theoretical concepts to practical applications across various domains. In the context of indoor navigation within complex buildings, SLAM has undergone several evolutionary phases, each addressing specific challenges inherent to indoor environments. The initial development of SLAM algorithms in the 1990s focused primarily on probabilistic approaches using extended Kalman filters, which laid the foundation for modern indoor navigation systems.
The evolution of indoor SLAM technology accelerated with the introduction of particle filters and graph-based optimization methods in the early 2000s, enabling more robust performance in dynamic and complex indoor settings. These advancements were further enhanced by the integration of multiple sensor modalities, transitioning from purely vision-based or LiDAR-based approaches to hybrid systems that leverage complementary sensor strengths to overcome individual limitations.
A significant milestone in indoor SLAM development occurred with the emergence of RGB-D cameras like Microsoft Kinect around 2010, which democratized access to depth information and catalyzed research in dense mapping techniques. This period also saw the rise of visual-inertial odometry systems that combine camera data with inertial measurements to improve tracking accuracy during rapid movements and in visually challenging environments.
Recent years have witnessed a paradigm shift toward learning-based SLAM approaches, where deep neural networks are employed to enhance feature extraction, loop closure detection, and map representation. These data-driven methods have demonstrated remarkable robustness in previously challenging scenarios such as texture-poor surfaces, repetitive structures, and varying lighting conditions commonly encountered in complex building interiors.
The primary objectives of modern indoor SLAM technology for complex buildings include achieving centimeter-level positioning accuracy without reliance on external infrastructure, maintaining real-time performance on resource-constrained devices, and ensuring robustness against environmental variations. Additionally, there is a growing emphasis on semantic understanding, where SLAM systems not only create geometric maps but also recognize and classify objects and spaces within the environment.
Looking forward, the trajectory of indoor SLAM technology is increasingly aligned with the requirements of ubiquitous computing and augmented reality applications. This includes the development of collaborative SLAM frameworks that enable multiple devices to contribute to a shared map, persistent mapping capabilities that accommodate environmental changes over time, and privacy-preserving approaches that balance detailed mapping with user data protection concerns.
The evolution of indoor SLAM technology accelerated with the introduction of particle filters and graph-based optimization methods in the early 2000s, enabling more robust performance in dynamic and complex indoor settings. These advancements were further enhanced by the integration of multiple sensor modalities, transitioning from purely vision-based or LiDAR-based approaches to hybrid systems that leverage complementary sensor strengths to overcome individual limitations.
A significant milestone in indoor SLAM development occurred with the emergence of RGB-D cameras like Microsoft Kinect around 2010, which democratized access to depth information and catalyzed research in dense mapping techniques. This period also saw the rise of visual-inertial odometry systems that combine camera data with inertial measurements to improve tracking accuracy during rapid movements and in visually challenging environments.
Recent years have witnessed a paradigm shift toward learning-based SLAM approaches, where deep neural networks are employed to enhance feature extraction, loop closure detection, and map representation. These data-driven methods have demonstrated remarkable robustness in previously challenging scenarios such as texture-poor surfaces, repetitive structures, and varying lighting conditions commonly encountered in complex building interiors.
The primary objectives of modern indoor SLAM technology for complex buildings include achieving centimeter-level positioning accuracy without reliance on external infrastructure, maintaining real-time performance on resource-constrained devices, and ensuring robustness against environmental variations. Additionally, there is a growing emphasis on semantic understanding, where SLAM systems not only create geometric maps but also recognize and classify objects and spaces within the environment.
Looking forward, the trajectory of indoor SLAM technology is increasingly aligned with the requirements of ubiquitous computing and augmented reality applications. This includes the development of collaborative SLAM frameworks that enable multiple devices to contribute to a shared map, persistent mapping capabilities that accommodate environmental changes over time, and privacy-preserving approaches that balance detailed mapping with user data protection concerns.
Market Analysis for Indoor Navigation Solutions
The indoor navigation market has witnessed substantial growth in recent years, driven by increasing demand for location-based services in complex building environments. The global indoor positioning and navigation market was valued at approximately $7.8 billion in 2020 and is projected to reach $23.6 billion by 2025, growing at a CAGR of 25.3%. This remarkable growth trajectory is fueled by the proliferation of smartphones, advancements in sensor technologies, and the rising adoption of IoT solutions across various sectors.
Healthcare facilities represent a significant market segment, where indoor navigation solutions enable efficient patient routing, asset tracking, and emergency response coordination. The healthcare indoor navigation market alone is expected to grow at 32% annually through 2025, as hospitals increasingly prioritize operational efficiency and patient experience improvements.
Retail establishments constitute another major market driver, with shopping malls and department stores implementing indoor navigation to enhance customer experiences and enable location-based marketing. According to retail industry reports, stores implementing precise indoor navigation solutions have reported up to 18% increases in customer engagement and 15% growth in sales conversion rates.
Transportation hubs such as airports and train stations are rapidly adopting SLAM-based navigation systems to assist travelers in navigating complex terminal layouts. With global air passenger traffic expected to double by 2037, the demand for efficient wayfinding solutions in transportation facilities continues to surge.
Corporate campuses and educational institutions represent emerging market segments, with organizations seeking to optimize space utilization and improve occupant experiences in increasingly complex building environments. The corporate sector adoption rate for indoor navigation solutions has increased by 27% annually since 2018.
From a geographical perspective, North America currently leads the market with approximately 38% share, followed by Europe (29%) and Asia-Pacific (24%). However, the Asia-Pacific region is expected to witness the fastest growth rate of 28.7% through 2025, driven by rapid urbanization and smart city initiatives in countries like China, Japan, and South Korea.
Key market challenges include accuracy limitations in complex multi-floor environments, integration difficulties with existing building management systems, and privacy concerns related to location tracking. Despite these challenges, the market outlook remains highly positive as technological advancements in SLAM algorithms continue to address precision issues while reducing computational requirements.
Healthcare facilities represent a significant market segment, where indoor navigation solutions enable efficient patient routing, asset tracking, and emergency response coordination. The healthcare indoor navigation market alone is expected to grow at 32% annually through 2025, as hospitals increasingly prioritize operational efficiency and patient experience improvements.
Retail establishments constitute another major market driver, with shopping malls and department stores implementing indoor navigation to enhance customer experiences and enable location-based marketing. According to retail industry reports, stores implementing precise indoor navigation solutions have reported up to 18% increases in customer engagement and 15% growth in sales conversion rates.
Transportation hubs such as airports and train stations are rapidly adopting SLAM-based navigation systems to assist travelers in navigating complex terminal layouts. With global air passenger traffic expected to double by 2037, the demand for efficient wayfinding solutions in transportation facilities continues to surge.
Corporate campuses and educational institutions represent emerging market segments, with organizations seeking to optimize space utilization and improve occupant experiences in increasingly complex building environments. The corporate sector adoption rate for indoor navigation solutions has increased by 27% annually since 2018.
From a geographical perspective, North America currently leads the market with approximately 38% share, followed by Europe (29%) and Asia-Pacific (24%). However, the Asia-Pacific region is expected to witness the fastest growth rate of 28.7% through 2025, driven by rapid urbanization and smart city initiatives in countries like China, Japan, and South Korea.
Key market challenges include accuracy limitations in complex multi-floor environments, integration difficulties with existing building management systems, and privacy concerns related to location tracking. Despite these challenges, the market outlook remains highly positive as technological advancements in SLAM algorithms continue to address precision issues while reducing computational requirements.
SLAM Challenges in Complex Building Environments
SLAM (Simultaneous Localization and Mapping) technology faces significant challenges when deployed in complex building environments. The architectural complexity of modern buildings introduces numerous obstacles that traditional SLAM systems struggle to overcome. Multi-floor structures with interconnected spaces, varying ceiling heights, and complex geometric layouts create difficulties in maintaining consistent mapping and localization.
Dynamic elements within buildings present another layer of complexity. The constant movement of people, furniture rearrangement, and temporary structures like exhibition booths or construction barriers create an ever-changing environment that challenges SLAM systems' ability to maintain stable reference points. These dynamic obstacles can cause significant drift in position estimation over time.
Perceptual aliasing is particularly problematic in indoor environments where repetitive architectural features such as identical corridors, similar office layouts, or standardized room designs make it difficult for SLAM algorithms to distinguish between different locations. This "loop closure" problem becomes more pronounced in large commercial buildings, hospitals, or educational institutions with standardized design elements.
The material composition of modern buildings introduces additional challenges. Glass walls, mirrors, and reflective surfaces create visual ambiguities and can cause erroneous feature detection. These materials often lead to false depth measurements in LiDAR-based systems or incorrect feature matching in vision-based approaches, resulting in mapping inconsistencies and localization failures.
Limited sensor range is a critical constraint in indoor environments. Unlike outdoor scenarios where GPS can provide periodic corrections, indoor SLAM must rely entirely on local sensor data. The effective range of sensors like cameras and LiDARs is often restricted by walls and partitions, limiting the system's ability to maintain global consistency across large building complexes.
Lighting variations present another significant challenge. Indoor environments experience dramatic changes in illumination conditions from natural light sources, artificial lighting, and shadows. These variations can drastically alter the appearance of visual features, making consistent feature tracking difficult for vision-based SLAM systems.
Computational constraints further complicate SLAM implementation in complex buildings. Real-time operation requirements for navigation applications demand efficient algorithms, yet the complexity of indoor environments often necessitates more sophisticated processing. This creates a fundamental tension between computational efficiency and mapping accuracy that remains challenging to resolve, particularly for resource-constrained mobile platforms.
Dynamic elements within buildings present another layer of complexity. The constant movement of people, furniture rearrangement, and temporary structures like exhibition booths or construction barriers create an ever-changing environment that challenges SLAM systems' ability to maintain stable reference points. These dynamic obstacles can cause significant drift in position estimation over time.
Perceptual aliasing is particularly problematic in indoor environments where repetitive architectural features such as identical corridors, similar office layouts, or standardized room designs make it difficult for SLAM algorithms to distinguish between different locations. This "loop closure" problem becomes more pronounced in large commercial buildings, hospitals, or educational institutions with standardized design elements.
The material composition of modern buildings introduces additional challenges. Glass walls, mirrors, and reflective surfaces create visual ambiguities and can cause erroneous feature detection. These materials often lead to false depth measurements in LiDAR-based systems or incorrect feature matching in vision-based approaches, resulting in mapping inconsistencies and localization failures.
Limited sensor range is a critical constraint in indoor environments. Unlike outdoor scenarios where GPS can provide periodic corrections, indoor SLAM must rely entirely on local sensor data. The effective range of sensors like cameras and LiDARs is often restricted by walls and partitions, limiting the system's ability to maintain global consistency across large building complexes.
Lighting variations present another significant challenge. Indoor environments experience dramatic changes in illumination conditions from natural light sources, artificial lighting, and shadows. These variations can drastically alter the appearance of visual features, making consistent feature tracking difficult for vision-based SLAM systems.
Computational constraints further complicate SLAM implementation in complex buildings. Real-time operation requirements for navigation applications demand efficient algorithms, yet the complexity of indoor environments often necessitates more sophisticated processing. This creates a fundamental tension between computational efficiency and mapping accuracy that remains challenging to resolve, particularly for resource-constrained mobile platforms.
Current SLAM Algorithms for Complex Structures
01 Sensor fusion techniques for improved SLAM accuracy
Integrating multiple sensors such as cameras, LiDAR, IMU, and GPS can significantly enhance SLAM navigation accuracy. By fusing data from different sensor types, the system can compensate for individual sensor limitations and provide more robust localization and mapping capabilities. This approach reduces drift errors and improves performance in challenging environments where a single sensor type might fail.- Sensor fusion techniques for improved SLAM accuracy: Integrating multiple sensors such as cameras, LiDAR, IMU, and GPS can significantly enhance SLAM navigation accuracy. By fusing data from different sensor types, the system can compensate for individual sensor limitations and provide more robust localization and mapping in various environments. This approach reduces drift and improves position estimation in challenging conditions like low-light environments or areas with limited features.
- Visual feature extraction and matching algorithms: Advanced feature extraction and matching algorithms improve SLAM navigation accuracy by identifying distinctive visual landmarks in the environment. These techniques include robust point feature detection, descriptor matching, and outlier rejection methods that enhance the system's ability to recognize previously visited locations. By improving feature correspondence across frames, these algorithms reduce accumulated errors and enable more precise mapping and localization.
- Loop closure and global optimization methods: Loop closure detection and global optimization techniques are crucial for maintaining SLAM accuracy over extended operation periods. When a system recognizes a previously visited location, it can correct accumulated drift by adjusting the entire trajectory and map. Methods such as pose graph optimization and bundle adjustment distribute errors across the trajectory, significantly improving overall mapping consistency and localization accuracy.
- Deep learning approaches for SLAM enhancement: Deep learning techniques are increasingly being applied to improve SLAM navigation accuracy. Neural networks can be trained to perform better feature detection, semantic understanding of environments, and prediction of motion patterns. These approaches enable more robust performance in challenging conditions such as dynamic environments with moving objects or scenes with repetitive patterns that traditionally cause SLAM systems to fail.
- Real-time error correction and adaptive mapping: Real-time error correction and adaptive mapping strategies dynamically adjust SLAM parameters based on environmental conditions and system performance. These methods include uncertainty estimation, active feature selection, and adaptive filtering techniques that continuously optimize the mapping and localization process. By monitoring system performance and environmental characteristics, these approaches can maintain high accuracy across diverse and changing environments.
02 Visual feature extraction and matching algorithms
Advanced feature extraction and matching algorithms are crucial for visual SLAM systems to accurately identify landmarks and track movement. These techniques include robust point feature detection, descriptor matching, and outlier rejection methods that work across varying lighting conditions and environments. Improved feature handling leads to more precise pose estimation and map construction, directly enhancing navigation accuracy.Expand Specific Solutions03 Loop closure and global optimization methods
Loop closure detection and global optimization techniques are essential for correcting accumulated errors in SLAM systems. When a previously visited location is recognized, the system can adjust the entire trajectory and map to maintain consistency. Methods such as pose graph optimization and bundle adjustment help distribute errors throughout the map rather than allowing them to accumulate, significantly improving long-term navigation accuracy.Expand Specific Solutions04 Real-time performance optimization techniques
Computational efficiency is critical for maintaining SLAM accuracy in real-time applications. Various optimization techniques include parallel processing, efficient data structures, keyframe selection strategies, and map management approaches that balance accuracy with computational resources. These methods ensure that the SLAM system can operate at sufficient speed while maintaining the precision required for reliable navigation.Expand Specific Solutions05 Environmental adaptation and robustness strategies
SLAM systems must adapt to diverse and challenging environments to maintain navigation accuracy. This includes handling dynamic objects, varying lighting conditions, featureless areas, and reflective surfaces. Robust estimation methods, dynamic object detection and filtering, illumination invariant processing, and environment-specific optimization techniques help SLAM systems perform reliably across different scenarios and maintain consistent accuracy.Expand Specific Solutions
Leading Companies in Indoor Navigation SLAM
The SLAM for indoor navigation in complex buildings market is currently in a growth phase, characterized by increasing adoption across sectors like construction, logistics, and facility management. The market size is expanding rapidly, driven by demand for precise indoor positioning solutions where GPS fails. Technologically, the field is maturing with companies at different development stages. OpenSpace leads with construction-focused solutions, while Baidu leverages its AI expertise for comprehensive indoor mapping platforms. Academic institutions like Tianjin University and Shenzhen University contribute significant research advancements. SRI International and Verity AG represent innovation in specialized applications, with the former focusing on defense applications and the latter on autonomous drone navigation systems. The ecosystem shows a healthy balance between established players and emerging startups developing specialized solutions.
Baidu Online Network Technology (Beijing) Co. Ltd.
Technical Solution: Baidu has developed an advanced indoor SLAM navigation system called "Apollo Indoor" that integrates visual-inertial odometry with LiDAR point cloud processing for complex building environments. Their solution employs a multi-sensor fusion approach combining RGB-D cameras, IMUs, and optional LiDAR sensors to achieve centimeter-level positioning accuracy. The system features a hierarchical mapping framework that creates and maintains both detailed local maps and compressed global maps, enabling efficient navigation in multi-floor complex structures. Baidu's implementation utilizes deep learning for semantic understanding of indoor spaces, recognizing features like doors, stairs, and elevators to improve path planning. The platform also incorporates crowdsourced map updates and cloud-based processing to continuously refine navigation accuracy while reducing on-device computational requirements.
Strengths: Superior multi-sensor fusion capabilities; robust performance in feature-poor environments; scalable cloud-based architecture for map maintenance. Weaknesses: Higher hardware requirements compared to vision-only solutions; dependency on initial mapping processes; potential privacy concerns with cloud-based processing.
Ford Global Technologies LLC
Technical Solution: Ford has developed an advanced indoor navigation SLAM system called "Ford Interior Mapping & Positioning System" (FIMPS) specifically designed for complex multi-level structures like parking garages and large industrial facilities. Their solution combines traditional visual-inertial SLAM techniques with proprietary radio frequency fingerprinting to achieve reliable positioning even in visually challenging environments. The system employs a graph-based optimization approach that maintains spatial consistency across large areas and multiple floors. Ford's implementation includes specialized algorithms for detecting and utilizing structural elements like support columns and level transitions as persistent landmarks. A notable feature is their "context-aware navigation" system that adapts positioning strategies based on environmental conditions, switching between visual, inertial, and RF-based methods as needed. The platform also incorporates vehicle-to-infrastructure communication capabilities, allowing multiple vehicles to share mapping data and improve collective navigation accuracy.
Strengths: Excellent performance in visually challenging environments like parking structures; robust multi-floor navigation capabilities; innovative RF-fingerprinting integration. Weaknesses: Partial dependency on infrastructure elements for optimal performance; higher computational requirements than simpler solutions; more complex initial deployment process.
Key Patents in Indoor SLAM Technology
Simultaneous localization and mapping using spatial and temporal coherence for indoor location
PatentInactiveEP2845025A1
Innovation
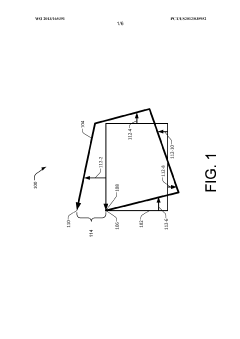
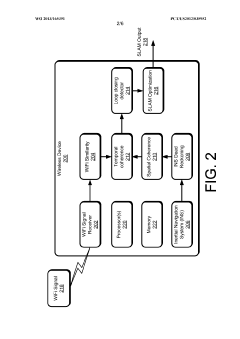
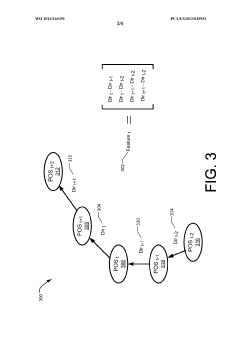
- Implementing a WiFi simultaneous localization and mapping (SLAM) algorithm that integrates spatial and temporal coherence using WiFi signals and inertial navigation system (INS) measurements to detect 'loop closing' and generate accurate location estimates with minimal deployment efforts, automatically creating a WiFi fingerprint map at fine granularity.
Simultaneous localization and mapping using spatial and temporal coherence for indoor location
PatentWO2013165391A1
Innovation
- Implementing a WiFi simultaneous localization and mapping (SLAM) algorithm that integrates spatial and temporal coherence using WiFi similarities and inertial navigation system (INS) measurements to detect 'loop closing' and generate accurate location estimates with minimal human intervention, reducing deployment efforts and achieving meter-level accuracy.

Integration with IoT and Smart Building Systems
The integration of SLAM (Simultaneous Localization and Mapping) technology with IoT (Internet of Things) and Smart Building Systems represents a significant advancement in indoor navigation capabilities for complex buildings. This convergence creates a synergistic ecosystem where SLAM provides precise positioning while IoT devices offer contextual awareness and additional data points to enhance navigation accuracy.
Smart building systems typically incorporate various sensors, including occupancy detectors, environmental monitors, and security devices. When integrated with SLAM, these sensors can provide supplementary data that helps refine the mapping process. For instance, occupancy sensors can indicate which areas are currently accessible, allowing navigation systems to dynamically reroute based on real-time building conditions rather than relying solely on static maps.
The bidirectional data flow between SLAM systems and IoT infrastructure enables enhanced functionality beyond basic navigation. Temperature sensors, air quality monitors, and lighting systems can feed information to the SLAM algorithm, creating context-aware navigation that considers environmental factors. This allows for intelligent path planning that might, for example, avoid areas with poor air quality or excessive noise levels when multiple route options exist.
Building Management Systems (BMS) integration represents another critical aspect of this technological convergence. SLAM systems can utilize BMS data regarding elevator operations, door access controls, and HVAC zones to optimize navigation instructions. Conversely, the spatial understanding provided by SLAM can help building systems operate more efficiently by providing precise occupancy information and movement patterns.
Emergency response capabilities are significantly enhanced through this integration. During evacuation scenarios, SLAM-equipped navigation systems can access real-time data from fire alarms, smoke detectors, and security systems to guide occupants along the safest available routes, avoiding hazardous areas while accounting for building congestion patterns.
Privacy and security considerations must be addressed when implementing these integrated systems. The extensive data collection required for effective operation raises concerns about user tracking and information security. Implementing appropriate data anonymization techniques and robust security protocols is essential to maintain user trust while preserving functionality.
Energy efficiency represents an additional benefit of this integration. By understanding precise occupant locations and movement patterns through SLAM technology, smart building systems can optimize lighting, heating, and cooling operations to reduce energy consumption while maintaining comfort in actively used areas. This creates a virtuous cycle where better navigation leads to improved building efficiency, which in turn supports more sustainable operations.
Smart building systems typically incorporate various sensors, including occupancy detectors, environmental monitors, and security devices. When integrated with SLAM, these sensors can provide supplementary data that helps refine the mapping process. For instance, occupancy sensors can indicate which areas are currently accessible, allowing navigation systems to dynamically reroute based on real-time building conditions rather than relying solely on static maps.
The bidirectional data flow between SLAM systems and IoT infrastructure enables enhanced functionality beyond basic navigation. Temperature sensors, air quality monitors, and lighting systems can feed information to the SLAM algorithm, creating context-aware navigation that considers environmental factors. This allows for intelligent path planning that might, for example, avoid areas with poor air quality or excessive noise levels when multiple route options exist.
Building Management Systems (BMS) integration represents another critical aspect of this technological convergence. SLAM systems can utilize BMS data regarding elevator operations, door access controls, and HVAC zones to optimize navigation instructions. Conversely, the spatial understanding provided by SLAM can help building systems operate more efficiently by providing precise occupancy information and movement patterns.
Emergency response capabilities are significantly enhanced through this integration. During evacuation scenarios, SLAM-equipped navigation systems can access real-time data from fire alarms, smoke detectors, and security systems to guide occupants along the safest available routes, avoiding hazardous areas while accounting for building congestion patterns.
Privacy and security considerations must be addressed when implementing these integrated systems. The extensive data collection required for effective operation raises concerns about user tracking and information security. Implementing appropriate data anonymization techniques and robust security protocols is essential to maintain user trust while preserving functionality.
Energy efficiency represents an additional benefit of this integration. By understanding precise occupant locations and movement patterns through SLAM technology, smart building systems can optimize lighting, heating, and cooling operations to reduce energy consumption while maintaining comfort in actively used areas. This creates a virtuous cycle where better navigation leads to improved building efficiency, which in turn supports more sustainable operations.
Privacy and Security Considerations for Indoor Mapping
Indoor mapping technologies, particularly SLAM-based systems for complex building navigation, introduce significant privacy and security concerns that must be addressed comprehensively. The collection of detailed spatial data inherently captures sensitive information about building layouts, occupant movements, and potentially personal spaces. This data, if compromised, could expose vulnerabilities in building security systems or reveal confidential facility information.
Primary privacy concerns include the inadvertent capture of personally identifiable information (PII) during mapping operations. Cameras and sensors may record individuals, personal belongings, or sensitive documents visible within mapped environments. Additionally, movement pattern analysis derived from navigation data could potentially be used to track individuals' behaviors, habits, and routines without explicit consent.
From a security perspective, detailed indoor maps represent valuable intelligence that could be exploited for unauthorized access. High-fidelity spatial models of secure facilities, when breached, might reveal entry points, security camera positions, or restricted areas. This information could facilitate physical security breaches or targeted attacks against building infrastructure.
Data storage and transmission present additional vulnerabilities. Indoor mapping systems typically generate substantial volumes of spatial data that must be securely stored and transmitted between devices and cloud services. Encryption protocols, access controls, and secure communication channels are essential to prevent unauthorized interception or exfiltration of sensitive mapping data.
Regulatory frameworks increasingly address these concerns, with legislation like GDPR in Europe and CCPA in California establishing requirements for spatial data handling. These regulations mandate transparent data collection practices, user consent mechanisms, and the right to data deletion—all of which must be incorporated into indoor mapping system architectures.
Technical mitigation strategies include data minimization approaches that limit collection to essential spatial information while excluding unnecessary environmental details. Anonymization techniques can be applied to remove or obscure identifiable features within mapped environments. Additionally, implementing differential privacy methods can protect aggregate spatial data while preserving analytical utility.
Access control frameworks represent another critical security layer, ensuring that mapping data is available only to authorized users with appropriate permissions. Role-based access controls, multi-factor authentication, and audit logging capabilities help maintain data integrity while preventing unauthorized exploitation of sensitive spatial information.
Primary privacy concerns include the inadvertent capture of personally identifiable information (PII) during mapping operations. Cameras and sensors may record individuals, personal belongings, or sensitive documents visible within mapped environments. Additionally, movement pattern analysis derived from navigation data could potentially be used to track individuals' behaviors, habits, and routines without explicit consent.
From a security perspective, detailed indoor maps represent valuable intelligence that could be exploited for unauthorized access. High-fidelity spatial models of secure facilities, when breached, might reveal entry points, security camera positions, or restricted areas. This information could facilitate physical security breaches or targeted attacks against building infrastructure.
Data storage and transmission present additional vulnerabilities. Indoor mapping systems typically generate substantial volumes of spatial data that must be securely stored and transmitted between devices and cloud services. Encryption protocols, access controls, and secure communication channels are essential to prevent unauthorized interception or exfiltration of sensitive mapping data.
Regulatory frameworks increasingly address these concerns, with legislation like GDPR in Europe and CCPA in California establishing requirements for spatial data handling. These regulations mandate transparent data collection practices, user consent mechanisms, and the right to data deletion—all of which must be incorporated into indoor mapping system architectures.
Technical mitigation strategies include data minimization approaches that limit collection to essential spatial information while excluding unnecessary environmental details. Anonymization techniques can be applied to remove or obscure identifiable features within mapped environments. Additionally, implementing differential privacy methods can protect aggregate spatial data while preserving analytical utility.
Access control frameworks represent another critical security layer, ensuring that mapping data is available only to authorized users with appropriate permissions. Role-based access controls, multi-factor authentication, and audit logging capabilities help maintain data integrity while preventing unauthorized exploitation of sensitive spatial information.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!