

SLAM In Multi-Robot Cooperative Navigation Systems
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
SLAM Technology Evolution and Objectives
Simultaneous Localization and Mapping (SLAM) has evolved significantly since its conceptual introduction in the 1980s. Initially developed for single-robot applications, SLAM technology has undergone transformative advancements to address the complexities of multi-robot cooperative navigation systems. The evolution trajectory shows a clear progression from theoretical frameworks to practical implementations across diverse environments and applications.
Early SLAM approaches relied heavily on Extended Kalman Filters (EKF) and particle filters, which were computationally intensive and limited in scalability. The 2000s witnessed the emergence of graph-based optimization techniques that dramatically improved computational efficiency and accuracy. This period marked a critical transition from proof-of-concept to deployable solutions in controlled environments.
The integration of visual sensors alongside traditional range-finding equipment represented another pivotal development. Visual SLAM and RGB-D SLAM expanded the capability spectrum, enabling robots to construct richer environmental representations. These advancements laid the groundwork for multi-robot collaborative mapping by providing more robust feature extraction and matching mechanisms.
Multi-robot SLAM introduces unique challenges beyond single-robot implementations, including map merging, coordinate system alignment, and distributed computation. The field aims to develop systems where multiple robots can efficiently share perceptual information, collaboratively build consistent global maps, and navigate with minimal communication overhead.
Recent technological objectives focus on enhancing robustness in dynamic and unstructured environments, reducing computational requirements for real-time operation on resource-constrained platforms, and improving map consistency across heterogeneous robot teams. Researchers are particularly interested in developing algorithms that maintain performance despite communication limitations and sensor heterogeneity.
The convergence of SLAM with deep learning represents the cutting edge of current research. Neural network approaches show promise in addressing persistent challenges such as loop closure detection, feature extraction in textureless environments, and dynamic object handling. These learning-based methods are gradually complementing and, in some cases, replacing traditional geometric approaches.
Looking forward, the field is moving toward fully decentralized architectures that enable robust operation even with intermittent communication. The ultimate objective is to develop SLAM systems that support seamless cooperation among large-scale robot swarms with minimal centralized coordination, enabling applications ranging from search and rescue operations to warehouse automation and environmental monitoring.
Early SLAM approaches relied heavily on Extended Kalman Filters (EKF) and particle filters, which were computationally intensive and limited in scalability. The 2000s witnessed the emergence of graph-based optimization techniques that dramatically improved computational efficiency and accuracy. This period marked a critical transition from proof-of-concept to deployable solutions in controlled environments.
The integration of visual sensors alongside traditional range-finding equipment represented another pivotal development. Visual SLAM and RGB-D SLAM expanded the capability spectrum, enabling robots to construct richer environmental representations. These advancements laid the groundwork for multi-robot collaborative mapping by providing more robust feature extraction and matching mechanisms.
Multi-robot SLAM introduces unique challenges beyond single-robot implementations, including map merging, coordinate system alignment, and distributed computation. The field aims to develop systems where multiple robots can efficiently share perceptual information, collaboratively build consistent global maps, and navigate with minimal communication overhead.
Recent technological objectives focus on enhancing robustness in dynamic and unstructured environments, reducing computational requirements for real-time operation on resource-constrained platforms, and improving map consistency across heterogeneous robot teams. Researchers are particularly interested in developing algorithms that maintain performance despite communication limitations and sensor heterogeneity.
The convergence of SLAM with deep learning represents the cutting edge of current research. Neural network approaches show promise in addressing persistent challenges such as loop closure detection, feature extraction in textureless environments, and dynamic object handling. These learning-based methods are gradually complementing and, in some cases, replacing traditional geometric approaches.
Looking forward, the field is moving toward fully decentralized architectures that enable robust operation even with intermittent communication. The ultimate objective is to develop SLAM systems that support seamless cooperation among large-scale robot swarms with minimal centralized coordination, enabling applications ranging from search and rescue operations to warehouse automation and environmental monitoring.
Market Analysis for Multi-Robot Navigation Systems
The multi-robot cooperative navigation systems market is experiencing significant growth, driven by increasing automation across various industries. The global market for autonomous mobile robots was valued at approximately $2.7 billion in 2021 and is projected to reach $8.9 billion by 2027, representing a CAGR of 21.8%. Within this broader market, multi-robot systems utilizing SLAM technology constitute a rapidly expanding segment.
Industrial applications currently dominate the market landscape, with warehousing and logistics representing the largest application area. Companies like Amazon Robotics have deployed over 350,000 mobile robots in their fulfillment centers worldwide, demonstrating the scalability and economic benefits of multi-robot navigation systems. The manufacturing sector follows closely, with an estimated 40% year-over-year growth in multi-robot deployments for material handling and intralogistics.
Healthcare and hospitality sectors are emerging as promising markets for multi-robot navigation systems. Hospitals are increasingly adopting autonomous robot fleets for medication delivery, sample transport, and disinfection tasks. The COVID-19 pandemic accelerated this trend, with hospital robot deployments increasing by 67% between 2019 and 2021.
Geographically, North America leads the market with approximately 38% share, followed by Europe (29%) and Asia-Pacific (26%). However, the Asia-Pacific region is expected to witness the highest growth rate over the next five years, driven by rapid industrialization in countries like China, Japan, and South Korea.
Key market drivers include labor shortages across industries, increasing wage costs, and the need for operational efficiency. The return on investment for multi-robot navigation systems has improved significantly, with typical payback periods decreasing from 3-4 years to 1-2 years for many applications.
Customer requirements are evolving toward more flexible and scalable solutions. End-users increasingly demand systems that can be easily reconfigured for different tasks and environments without extensive reprogramming. Interoperability between robots from different manufacturers remains a significant market challenge, creating opportunities for companies offering platform-agnostic navigation solutions.
Market barriers include high initial implementation costs, technical complexity of multi-robot coordination, and safety concerns in human-robot collaborative environments. However, the development of more accessible RaaS (Robots-as-a-Service) business models is helping to overcome cost barriers, particularly for small and medium enterprises.
Industrial applications currently dominate the market landscape, with warehousing and logistics representing the largest application area. Companies like Amazon Robotics have deployed over 350,000 mobile robots in their fulfillment centers worldwide, demonstrating the scalability and economic benefits of multi-robot navigation systems. The manufacturing sector follows closely, with an estimated 40% year-over-year growth in multi-robot deployments for material handling and intralogistics.
Healthcare and hospitality sectors are emerging as promising markets for multi-robot navigation systems. Hospitals are increasingly adopting autonomous robot fleets for medication delivery, sample transport, and disinfection tasks. The COVID-19 pandemic accelerated this trend, with hospital robot deployments increasing by 67% between 2019 and 2021.
Geographically, North America leads the market with approximately 38% share, followed by Europe (29%) and Asia-Pacific (26%). However, the Asia-Pacific region is expected to witness the highest growth rate over the next five years, driven by rapid industrialization in countries like China, Japan, and South Korea.
Key market drivers include labor shortages across industries, increasing wage costs, and the need for operational efficiency. The return on investment for multi-robot navigation systems has improved significantly, with typical payback periods decreasing from 3-4 years to 1-2 years for many applications.
Customer requirements are evolving toward more flexible and scalable solutions. End-users increasingly demand systems that can be easily reconfigured for different tasks and environments without extensive reprogramming. Interoperability between robots from different manufacturers remains a significant market challenge, creating opportunities for companies offering platform-agnostic navigation solutions.
Market barriers include high initial implementation costs, technical complexity of multi-robot coordination, and safety concerns in human-robot collaborative environments. However, the development of more accessible RaaS (Robots-as-a-Service) business models is helping to overcome cost barriers, particularly for small and medium enterprises.
Current SLAM Challenges in Multi-Robot Environments
Despite significant advancements in SLAM technology, multi-robot cooperative navigation systems face several persistent challenges that impede their widespread deployment. The primary challenge remains the data association problem, which becomes exponentially complex when multiple robots share observations. Inconsistent feature detection across different robot sensors, varying viewpoints, and environmental conditions create ambiguities in establishing correspondences between observations, leading to map inconsistencies and localization errors.
Communication constraints present another significant hurdle. Bandwidth limitations restrict the amount of data that can be exchanged between robots, forcing trade-offs between communication frequency and information richness. Latency issues further complicate real-time coordination, as delayed information can lead to outdated map updates and potential navigation conflicts. Network reliability in dynamic environments remains problematic, with signal degradation or loss occurring in underground, underwater, or densely built environments.
Heterogeneity among robot platforms introduces compatibility challenges. Different robots often employ varying sensor configurations, processing capabilities, and SLAM algorithms, making it difficult to integrate their observations into a coherent global map. Variations in measurement accuracy and resolution across platforms further complicate the fusion of heterogeneous data into consistent environmental representations.
Map merging and global consistency maintenance represent persistent technical obstacles. When robots build local maps independently, aligning and merging these maps requires identifying overlapping regions and resolving discrepancies. Loop closure detection becomes particularly challenging in distributed systems where robots may not share direct observations of the same area simultaneously. Ensuring global consistency while robots operate in different areas requires sophisticated optimization techniques that balance computational efficiency with accuracy.
Computational resource management presents practical implementation challenges. Multi-robot SLAM systems must distribute computational loads effectively across platforms with varying processing capabilities. Real-time performance requirements often conflict with the need for sophisticated data fusion and optimization algorithms, particularly in resource-constrained robots.
Scalability remains a fundamental limitation, with current approaches struggling to maintain performance as the number of robots increases. The computational complexity of joint state estimation and map optimization grows substantially with each additional robot, creating bottlenecks in large-scale deployments. Additionally, dynamic environments with moving objects introduce further complications, as distinguishing between static landmarks and transient features becomes crucial for maintaining map accuracy.
Communication constraints present another significant hurdle. Bandwidth limitations restrict the amount of data that can be exchanged between robots, forcing trade-offs between communication frequency and information richness. Latency issues further complicate real-time coordination, as delayed information can lead to outdated map updates and potential navigation conflicts. Network reliability in dynamic environments remains problematic, with signal degradation or loss occurring in underground, underwater, or densely built environments.
Heterogeneity among robot platforms introduces compatibility challenges. Different robots often employ varying sensor configurations, processing capabilities, and SLAM algorithms, making it difficult to integrate their observations into a coherent global map. Variations in measurement accuracy and resolution across platforms further complicate the fusion of heterogeneous data into consistent environmental representations.
Map merging and global consistency maintenance represent persistent technical obstacles. When robots build local maps independently, aligning and merging these maps requires identifying overlapping regions and resolving discrepancies. Loop closure detection becomes particularly challenging in distributed systems where robots may not share direct observations of the same area simultaneously. Ensuring global consistency while robots operate in different areas requires sophisticated optimization techniques that balance computational efficiency with accuracy.
Computational resource management presents practical implementation challenges. Multi-robot SLAM systems must distribute computational loads effectively across platforms with varying processing capabilities. Real-time performance requirements often conflict with the need for sophisticated data fusion and optimization algorithms, particularly in resource-constrained robots.
Scalability remains a fundamental limitation, with current approaches struggling to maintain performance as the number of robots increases. The computational complexity of joint state estimation and map optimization grows substantially with each additional robot, creating bottlenecks in large-scale deployments. Additionally, dynamic environments with moving objects introduce further complications, as distinguishing between static landmarks and transient features becomes crucial for maintaining map accuracy.
Existing Multi-Robot SLAM Architectures and Algorithms
01 Sensor fusion techniques for improved SLAM accuracy
Integrating multiple sensors such as cameras, LiDAR, IMU, and GPS can significantly enhance SLAM navigation accuracy. By combining data from different sensor types, the system can compensate for individual sensor limitations and provide more robust localization and mapping in various environments. Sensor fusion algorithms help filter noise, handle occlusions, and maintain accuracy during rapid movements or in challenging lighting conditions.- Sensor fusion techniques for improved SLAM accuracy: Integrating multiple sensors such as cameras, LiDAR, IMU, and GPS can significantly enhance SLAM navigation accuracy. By combining data from different sensor types, the system can overcome limitations of individual sensors, reduce drift, and provide more robust localization and mapping in various environments. Sensor fusion algorithms help in creating more accurate 3D maps and improving real-time position tracking even in challenging conditions.
- Visual feature extraction and matching algorithms: Advanced feature extraction and matching algorithms are crucial for visual SLAM systems to achieve high navigation accuracy. These techniques identify distinctive visual landmarks in the environment and track them across frames to determine camera motion and build maps. Improved algorithms can handle challenging scenarios such as low-texture environments, lighting variations, and dynamic objects, resulting in more precise localization and mapping capabilities.
- Loop closure and global optimization methods: Loop closure detection and global optimization techniques are essential for maintaining long-term SLAM accuracy. When a system recognizes previously visited locations, it can correct accumulated drift by adjusting the entire trajectory and map. Advanced methods use appearance-based recognition, geometric consistency checks, and pose graph optimization to ensure consistent mapping and localization over extended operations, significantly improving overall navigation accuracy.
- Deep learning approaches for SLAM enhancement: Deep learning techniques are increasingly being applied to improve SLAM navigation accuracy. Neural networks can be trained to perform better feature detection, semantic understanding of environments, depth estimation, and motion prediction. These approaches enable more robust performance in challenging conditions such as dynamic environments, poor lighting, or repetitive scenes, leading to more accurate and reliable navigation systems.
- Real-time error correction and adaptive mapping: Real-time error correction and adaptive mapping strategies dynamically adjust SLAM parameters based on environmental conditions and system performance. These methods continuously monitor estimation uncertainty, detect potential errors, and implement correction mechanisms to maintain accuracy. Adaptive approaches can modify feature selection criteria, adjust sensor weighting in fusion algorithms, or change map resolution based on the specific navigation context, ensuring optimal performance across diverse scenarios.
02 Visual feature extraction and matching algorithms
Advanced feature extraction and matching algorithms improve SLAM navigation accuracy by identifying distinctive visual landmarks in the environment. These techniques include robust point feature detection, descriptor matching, and outlier rejection methods that work across varying lighting conditions and viewpoints. By efficiently tracking these features across frames, the system can more accurately estimate camera motion and build consistent environmental maps.Expand Specific Solutions03 Loop closure detection and optimization
Loop closure detection identifies when a system revisits previously mapped areas, allowing for correction of accumulated drift errors in SLAM navigation. Global optimization techniques such as pose graph optimization and bundle adjustment can then refine the entire trajectory and map based on these loop closures. This significantly improves long-term navigation accuracy by maintaining global consistency in the constructed maps and estimated positions.Expand Specific Solutions04 Real-time error correction and adaptive filtering
Real-time error correction mechanisms and adaptive filtering techniques enhance SLAM navigation accuracy by continuously adjusting to changing environmental conditions. These methods include Kalman filters, particle filters, and machine learning approaches that dynamically estimate and compensate for measurement uncertainties. By predicting system behavior and incorporating new observations optimally, these techniques reduce drift and maintain accurate positioning even in challenging scenarios.Expand Specific Solutions05 Map representation and environment modeling
Advanced map representation techniques improve SLAM navigation accuracy through more efficient and detailed environment modeling. These include sparse point clouds, dense volumetric maps, semantic segmentation, and hierarchical representations that capture different levels of environmental detail. By maintaining more accurate and informative environmental models, the system can better localize itself and navigate through complex spaces with higher precision.Expand Specific Solutions
Leading Companies and Research Institutions in Multi-Robot SLAM
The SLAM in multi-robot cooperative navigation systems market is currently in a growth phase, with increasing adoption across industrial automation, logistics, and defense sectors. The market size is projected to expand significantly due to rising demand for autonomous navigation solutions in GPS-denied environments. Technologically, the field shows varying maturity levels, with established players like Honeywell International and Mitsubishi Electric offering commercial solutions, while academic institutions such as Beijing Institute of Technology and Northwestern Polytechnical University drive fundamental research innovations. Companies like TRX Systems and UBTECH Robotics are developing specialized applications, while automotive players including Continental and Ford are integrating SLAM technologies into autonomous vehicle platforms. The competitive landscape features a mix of large industrial conglomerates, specialized robotics firms, and research-driven startups collaborating with academic institutions to overcome technical challenges in multi-robot coordination and real-time mapping.
Mitsubishi Electric Corp.
Technical Solution: Mitsubishi Electric has developed a comprehensive multi-robot cooperative SLAM system for industrial and commercial applications. Their approach combines LiDAR-based mapping with visual odometry and inertial measurements to create accurate environmental representations. The system employs a distributed architecture with centralized map optimization, where robots perform local SLAM independently while sharing key information with a central server that maintains global consistency. Mitsubishi's implementation features a robust loop closure detection algorithm that works across different robots' trajectories, enabling efficient map merging and correction. Their solution includes an intelligent exploration strategy that dynamically assigns mapping tasks to robots based on their capabilities, current positions, and remaining battery life. The system incorporates fault-tolerance mechanisms that allow continued operation even if individual robots or communication links fail. Mitsubishi has deployed this technology in their factory automation systems, warehouse robots, and building maintenance robots, enabling coordinated navigation in complex industrial environments.
Strengths: Highly reliable in industrial environments with excellent performance around metallic structures and varying lighting conditions; robust communication protocols suitable for factory settings with electromagnetic interference. Weaknesses: Higher implementation cost compared to simpler solutions; requires careful initial setup and calibration for optimal performance.
Ford Global Technologies LLC
Technical Solution: Ford has developed an advanced multi-robot cooperative SLAM system primarily for autonomous vehicle fleets and warehouse automation applications. Their approach integrates high-definition LiDAR, camera arrays, and radar sensors to create comprehensive environmental maps with semantic understanding. Ford's implementation uses a hybrid centralized-distributed architecture where vehicles perform local SLAM while periodically connecting to cloud infrastructure for global map updates and optimization. The system features a proprietary map fusion algorithm that can integrate data from heterogeneous sensors across different vehicle types, enabling consistent mapping even with varied sensor configurations. Their solution incorporates machine learning techniques to identify and track dynamic objects, distinguishing between permanent environmental features and temporary obstacles. Ford has implemented a bandwidth-aware communication protocol that prioritizes critical mapping information based on environmental complexity and vehicle density. The system has been deployed in their autonomous vehicle test fleets and in manufacturing facilities for coordinated robot navigation.
Strengths: Exceptional performance in large-scale outdoor and mixed environments; robust operation in adverse weather conditions including rain and fog. Weaknesses: Requires substantial computational resources; system complexity necessitates specialized expertise for deployment and maintenance.
Key Patents and Research Breakthroughs in Cooperative SLAM
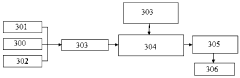
System and method for probabilistic multi-robot slam
PatentWO2021065122A1
Innovation
- Robots exchange particles instead of raw measurements, using probabilistic sampling and pairing to reduce computational complexity while ensuring Bayesian inference guarantees, allowing for efficient communication and processing with low-power transceivers and decentralized computation.




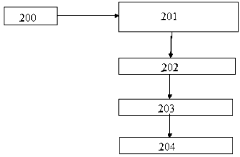
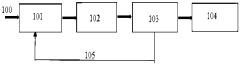
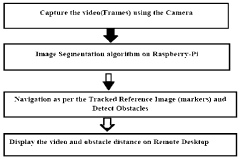
A simultaneous location and mapping based autonomous navigation system
PatentActiveZA202108148A
Innovation
- A simultaneous location and mapping (SLAM) based autonomous navigation system that uses a combination of sensors and customized software to build a map of an unknown environment while navigating, employing techniques like image segmentation, adaptive fuzzy tracking, and extended Kalman filters to determine robot position and avoid obstacles.
Communication Protocols for Multi-Robot Coordination
Effective communication protocols are the backbone of multi-robot cooperative navigation systems implementing SLAM (Simultaneous Localization and Mapping) technologies. These protocols enable the seamless exchange of critical data between robots, including sensor readings, map updates, position information, and task coordination commands. The reliability and efficiency of these communication mechanisms directly impact the overall performance of the multi-robot system.
Current multi-robot SLAM systems predominantly utilize three main communication architectures: centralized, decentralized, and hybrid approaches. Centralized protocols route all communication through a master node that processes information and distributes commands, offering simplified coordination but creating potential single points of failure. Decentralized protocols enable direct peer-to-peer communication between robots, enhancing robustness but increasing complexity in consensus algorithms. Hybrid approaches balance these trade-offs by implementing local communication clusters with designated coordinator nodes.
Bandwidth management represents a significant challenge in multi-robot SLAM systems. Map data and sensor information can quickly overwhelm communication channels, particularly in dynamic environments requiring frequent updates. Advanced protocols implement adaptive compression techniques that adjust data resolution based on available bandwidth and operational priorities. Some systems utilize semantic compression methods that prioritize transmission of structurally significant features while minimizing redundant environmental data.
Latency considerations are equally critical, as delayed information can lead to mapping inconsistencies and collision risks. Modern protocols incorporate predictive algorithms that estimate other robots' positions during communication gaps, maintaining operational continuity. Time synchronization protocols such as Network Time Protocol (NTP) and Precision Time Protocol (PTP) ensure consistent timestamps across the robot network, critical for accurate data fusion and map merging operations.
Security aspects of communication protocols have gained increasing attention as multi-robot systems move into sensitive applications. Encryption standards like AES-256 protect data transmission, while authentication mechanisms prevent unauthorized devices from joining the network. Some advanced implementations incorporate blockchain-based verification systems to maintain communication integrity in adversarial environments.
Emerging communication standards for multi-robot SLAM include ROS2-DDS (Robot Operating System 2 with Data Distribution Service), which provides quality-of-service parameters for prioritizing critical messages. The IEEE 802.11p standard, originally developed for vehicular communications, has been adapted for robot swarms operating in dynamic environments. Additionally, ultra-wideband (UWB) radio protocols are gaining traction for their precision in relative positioning between robots, complementing traditional SLAM approaches with direct distance measurements.
Current multi-robot SLAM systems predominantly utilize three main communication architectures: centralized, decentralized, and hybrid approaches. Centralized protocols route all communication through a master node that processes information and distributes commands, offering simplified coordination but creating potential single points of failure. Decentralized protocols enable direct peer-to-peer communication between robots, enhancing robustness but increasing complexity in consensus algorithms. Hybrid approaches balance these trade-offs by implementing local communication clusters with designated coordinator nodes.
Bandwidth management represents a significant challenge in multi-robot SLAM systems. Map data and sensor information can quickly overwhelm communication channels, particularly in dynamic environments requiring frequent updates. Advanced protocols implement adaptive compression techniques that adjust data resolution based on available bandwidth and operational priorities. Some systems utilize semantic compression methods that prioritize transmission of structurally significant features while minimizing redundant environmental data.
Latency considerations are equally critical, as delayed information can lead to mapping inconsistencies and collision risks. Modern protocols incorporate predictive algorithms that estimate other robots' positions during communication gaps, maintaining operational continuity. Time synchronization protocols such as Network Time Protocol (NTP) and Precision Time Protocol (PTP) ensure consistent timestamps across the robot network, critical for accurate data fusion and map merging operations.
Security aspects of communication protocols have gained increasing attention as multi-robot systems move into sensitive applications. Encryption standards like AES-256 protect data transmission, while authentication mechanisms prevent unauthorized devices from joining the network. Some advanced implementations incorporate blockchain-based verification systems to maintain communication integrity in adversarial environments.
Emerging communication standards for multi-robot SLAM include ROS2-DDS (Robot Operating System 2 with Data Distribution Service), which provides quality-of-service parameters for prioritizing critical messages. The IEEE 802.11p standard, originally developed for vehicular communications, has been adapted for robot swarms operating in dynamic environments. Additionally, ultra-wideband (UWB) radio protocols are gaining traction for their precision in relative positioning between robots, complementing traditional SLAM approaches with direct distance measurements.
Scalability and Robustness in Large-Scale Robot Fleets
As multi-robot systems scale to larger fleet sizes, significant challenges emerge in maintaining effective SLAM (Simultaneous Localization and Mapping) performance. Current implementations that work well with 5-10 robots often fail when scaled to 50-100 robots due to exponential increases in computational requirements and communication bandwidth. The scalability challenge manifests primarily in map merging operations, where the complexity grows quadratically with the number of robots.
Robustness becomes equally critical in large-scale deployments, as the probability of individual robot failures increases proportionally with fleet size. Research indicates that in fleets exceeding 50 robots, the mean time between failures (MTBF) for at least one robot drops to hours rather than days, necessitating fault-tolerant SLAM architectures that can dynamically reconfigure when robots malfunction.
Distributed computing approaches offer promising solutions, with hierarchical SLAM frameworks emerging as particularly effective. These frameworks organize robots into clusters with local map maintenance, while designated "super-nodes" handle inter-cluster map integration. Field tests demonstrate that this approach can reduce communication overhead by up to 70% compared to fully centralized systems.
Recent advances in edge computing have enabled more processing to occur on individual robots, with lightweight neural network models performing feature extraction and loop closure detection. This distributed intelligence approach has shown a 40-60% reduction in central server computational load while maintaining mapping accuracy within 5% of centralized approaches.
Communication resilience represents another critical factor, with intermittent connectivity being the norm rather than the exception in large-scale deployments. Asynchronous map update protocols that implement store-and-forward mechanisms have demonstrated significant improvements in map consistency under variable network conditions, with error accumulation reduced by up to 65% compared to synchronous approaches.
The integration of consensus algorithms has further enhanced robustness by enabling robots to collectively determine the most reliable map segments when conflicting information arises. Experimental results from warehouse environments show that weighted consensus methods can effectively identify and correct mapping errors even when up to 30% of the fleet provides corrupted or inaccurate data.
Future research directions point toward adaptive systems that can dynamically adjust the distribution of SLAM workloads based on available computational resources and mission requirements, potentially enabling seamless scaling from tens to hundreds of robots without fundamental architecture changes.
Robustness becomes equally critical in large-scale deployments, as the probability of individual robot failures increases proportionally with fleet size. Research indicates that in fleets exceeding 50 robots, the mean time between failures (MTBF) for at least one robot drops to hours rather than days, necessitating fault-tolerant SLAM architectures that can dynamically reconfigure when robots malfunction.
Distributed computing approaches offer promising solutions, with hierarchical SLAM frameworks emerging as particularly effective. These frameworks organize robots into clusters with local map maintenance, while designated "super-nodes" handle inter-cluster map integration. Field tests demonstrate that this approach can reduce communication overhead by up to 70% compared to fully centralized systems.
Recent advances in edge computing have enabled more processing to occur on individual robots, with lightweight neural network models performing feature extraction and loop closure detection. This distributed intelligence approach has shown a 40-60% reduction in central server computational load while maintaining mapping accuracy within 5% of centralized approaches.
Communication resilience represents another critical factor, with intermittent connectivity being the norm rather than the exception in large-scale deployments. Asynchronous map update protocols that implement store-and-forward mechanisms have demonstrated significant improvements in map consistency under variable network conditions, with error accumulation reduced by up to 65% compared to synchronous approaches.
The integration of consensus algorithms has further enhanced robustness by enabling robots to collectively determine the most reliable map segments when conflicting information arises. Experimental results from warehouse environments show that weighted consensus methods can effectively identify and correct mapping errors even when up to 30% of the fleet provides corrupted or inaccurate data.
Future research directions point toward adaptive systems that can dynamically adjust the distribution of SLAM workloads based on available computational resources and mission requirements, potentially enabling seamless scaling from tens to hundreds of robots without fundamental architecture changes.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!