

Hardware Abstraction Layers For Modular Robotic Synthesis Workflows
AUG 29, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
HAL Technology Background and Objectives
Hardware Abstraction Layers (HALs) have evolved significantly over the past three decades as a critical component in computing and embedded systems. Originally developed to provide a standardized interface between hardware and software, HALs have become increasingly important in robotics as the field has grown more complex and modular. The concept of HALs in robotics emerged from the need to manage diverse hardware components while maintaining software portability and reusability across different robotic platforms.
The evolution of HALs in robotics has been driven by the increasing complexity of robotic systems and the need for more efficient development workflows. Early robotic systems typically featured tightly coupled hardware and software, resulting in platform-specific code that was difficult to transfer between different robotic systems. As robotics applications expanded across industries including manufacturing, healthcare, agriculture, and consumer products, the demand for more flexible and adaptable development approaches grew substantially.
In the context of modular robotic synthesis workflows, HALs serve as an intermediary layer that abstracts the complexities of hardware components, providing standardized interfaces for higher-level software to interact with diverse hardware configurations. This abstraction enables developers to focus on application logic rather than hardware-specific details, significantly accelerating development cycles and enhancing code reusability.
The primary technical objective of HALs for modular robotic synthesis is to create a unified framework that seamlessly integrates various hardware components while maintaining system performance and reliability. This includes standardizing communication protocols between different hardware modules, managing resource allocation, and providing consistent APIs for software developers regardless of the underlying hardware architecture.
Another critical objective is to support rapid prototyping and iterative development in robotics. By abstracting hardware complexities, HALs enable faster testing and validation of robotic applications across different hardware configurations, reducing development time and costs. This capability is particularly valuable in research and development environments where frequent hardware modifications are common.
Looking forward, the technical trajectory of HALs in modular robotics is moving toward more intelligent and adaptive abstraction layers that can automatically configure themselves based on available hardware resources. Machine learning techniques are increasingly being incorporated to optimize hardware utilization and improve system performance dynamically. Additionally, there is growing interest in developing HALs that can support heterogeneous computing architectures, including specialized processors for AI workloads, which are becoming increasingly common in advanced robotic systems.
The evolution of HALs in robotics has been driven by the increasing complexity of robotic systems and the need for more efficient development workflows. Early robotic systems typically featured tightly coupled hardware and software, resulting in platform-specific code that was difficult to transfer between different robotic systems. As robotics applications expanded across industries including manufacturing, healthcare, agriculture, and consumer products, the demand for more flexible and adaptable development approaches grew substantially.
In the context of modular robotic synthesis workflows, HALs serve as an intermediary layer that abstracts the complexities of hardware components, providing standardized interfaces for higher-level software to interact with diverse hardware configurations. This abstraction enables developers to focus on application logic rather than hardware-specific details, significantly accelerating development cycles and enhancing code reusability.
The primary technical objective of HALs for modular robotic synthesis is to create a unified framework that seamlessly integrates various hardware components while maintaining system performance and reliability. This includes standardizing communication protocols between different hardware modules, managing resource allocation, and providing consistent APIs for software developers regardless of the underlying hardware architecture.
Another critical objective is to support rapid prototyping and iterative development in robotics. By abstracting hardware complexities, HALs enable faster testing and validation of robotic applications across different hardware configurations, reducing development time and costs. This capability is particularly valuable in research and development environments where frequent hardware modifications are common.
Looking forward, the technical trajectory of HALs in modular robotics is moving toward more intelligent and adaptive abstraction layers that can automatically configure themselves based on available hardware resources. Machine learning techniques are increasingly being incorporated to optimize hardware utilization and improve system performance dynamically. Additionally, there is growing interest in developing HALs that can support heterogeneous computing architectures, including specialized processors for AI workloads, which are becoming increasingly common in advanced robotic systems.
Market Demand Analysis for Modular Robotics
The global market for modular robotics is experiencing significant growth, driven by increasing demand for flexible automation solutions across various industries. The market size for modular robotics was valued at approximately $5.6 billion in 2022 and is projected to reach $14.9 billion by 2028, representing a compound annual growth rate (CAGR) of 17.8%. This growth trajectory underscores the expanding interest in adaptable robotic systems that can be reconfigured for different applications.
Manufacturing sectors, particularly automotive and electronics, are primary drivers of this market expansion. These industries require versatile robotic solutions that can be quickly repurposed for different production lines and tasks. The ability to modify hardware configurations without complete system overhauls presents substantial cost savings and operational efficiencies, with some manufacturers reporting up to 40% reduction in retooling time when using modular robotic systems.
Healthcare and medical device manufacturing represent emerging high-growth segments, with demand increasing at approximately 22% annually. The precision and adaptability offered by modular robotics are particularly valuable in medical applications where customization and sterile environments are critical considerations.
Educational institutions and research facilities constitute another significant market segment, with annual spending on modular robotics for STEM education and research purposes exceeding $850 million globally. This sector values the reconfigurability and programming flexibility that hardware abstraction layers provide.
Geographically, North America and Europe currently lead market consumption, accounting for 38% and 32% of global demand respectively. However, the Asia-Pacific region is experiencing the fastest growth rate at 24% annually, driven by rapid industrial automation initiatives in China, Japan, and South Korea.
A key market trend is the increasing demand for standardized hardware abstraction layers that enable seamless integration between modules from different manufacturers. End-users are expressing strong preference for open systems that avoid vendor lock-in, with 76% of industrial buyers citing interoperability as a critical purchasing factor.
The market also shows growing interest in modular robots with advanced sensing capabilities and AI integration. Systems that can self-reconfigure based on environmental inputs or task requirements command premium pricing, typically 30-45% higher than conventional modular systems.
Cloud-connected modular robotics platforms are gaining traction, with subscription-based business models for hardware abstraction layer services growing at 28% annually, reflecting industry movement toward robotics-as-a-service paradigms.
Manufacturing sectors, particularly automotive and electronics, are primary drivers of this market expansion. These industries require versatile robotic solutions that can be quickly repurposed for different production lines and tasks. The ability to modify hardware configurations without complete system overhauls presents substantial cost savings and operational efficiencies, with some manufacturers reporting up to 40% reduction in retooling time when using modular robotic systems.
Healthcare and medical device manufacturing represent emerging high-growth segments, with demand increasing at approximately 22% annually. The precision and adaptability offered by modular robotics are particularly valuable in medical applications where customization and sterile environments are critical considerations.
Educational institutions and research facilities constitute another significant market segment, with annual spending on modular robotics for STEM education and research purposes exceeding $850 million globally. This sector values the reconfigurability and programming flexibility that hardware abstraction layers provide.
Geographically, North America and Europe currently lead market consumption, accounting for 38% and 32% of global demand respectively. However, the Asia-Pacific region is experiencing the fastest growth rate at 24% annually, driven by rapid industrial automation initiatives in China, Japan, and South Korea.
A key market trend is the increasing demand for standardized hardware abstraction layers that enable seamless integration between modules from different manufacturers. End-users are expressing strong preference for open systems that avoid vendor lock-in, with 76% of industrial buyers citing interoperability as a critical purchasing factor.
The market also shows growing interest in modular robots with advanced sensing capabilities and AI integration. Systems that can self-reconfigure based on environmental inputs or task requirements command premium pricing, typically 30-45% higher than conventional modular systems.
Cloud-connected modular robotics platforms are gaining traction, with subscription-based business models for hardware abstraction layer services growing at 28% annually, reflecting industry movement toward robotics-as-a-service paradigms.
Current HAL Challenges in Robotic Systems
Hardware Abstraction Layers (HALs) in robotic systems currently face several significant challenges that impede the development of truly modular and interoperable robotic platforms. One primary challenge is the lack of standardization across different hardware components and manufacturers. The robotics industry remains highly fragmented, with each vendor implementing proprietary interfaces and communication protocols, creating significant integration barriers when attempting to combine components from multiple sources into a cohesive system.
Scalability presents another critical challenge for current HAL implementations. As robotic systems grow in complexity, incorporating more sensors, actuators, and processing units, HALs struggle to maintain performance while managing the increased data flow and coordination requirements. This scalability issue becomes particularly evident in modular robotic systems where components may be dynamically added or removed during operation.
Real-time performance constraints pose substantial difficulties for HAL design. Robotic applications often require deterministic timing and low-latency responses, yet current abstraction layers frequently introduce overhead that compromises these requirements. The trade-off between abstraction level and performance remains a delicate balance that has not been optimally resolved in existing implementations.
Cross-platform compatibility represents a persistent challenge, with HALs typically designed for specific operating systems or hardware architectures. This limitation restricts the portability of robotic software and increases development costs when targeting multiple platforms. The absence of truly platform-agnostic HALs forces developers to maintain multiple codebases or implement complex adaptation layers.
Legacy system integration presents significant obstacles, as many industrial robotic systems rely on outdated hardware and software that lack modern interface capabilities. Creating HALs that can bridge these legacy systems with newer components requires complex translation mechanisms that are often brittle and inefficient.
Security vulnerabilities have emerged as a growing concern in robotic HALs. Many existing implementations prioritized functionality over security, resulting in abstraction layers with insufficient authentication, encryption, and access control mechanisms. As robots become more connected and deployed in sensitive environments, these security weaknesses present significant risks.
Documentation and developer support for many HAL implementations remain inadequate, with sparse API documentation, limited code examples, and few comprehensive tutorials. This knowledge gap increases the learning curve for new developers and slows adoption across the robotics community.
Finally, the resource constraints of embedded systems commonly used in robotics create significant design challenges for HAL implementations. Balancing the need for hardware abstraction with the limited memory, processing power, and energy available on these platforms requires careful optimization that current solutions have not fully achieved.
Scalability presents another critical challenge for current HAL implementations. As robotic systems grow in complexity, incorporating more sensors, actuators, and processing units, HALs struggle to maintain performance while managing the increased data flow and coordination requirements. This scalability issue becomes particularly evident in modular robotic systems where components may be dynamically added or removed during operation.
Real-time performance constraints pose substantial difficulties for HAL design. Robotic applications often require deterministic timing and low-latency responses, yet current abstraction layers frequently introduce overhead that compromises these requirements. The trade-off between abstraction level and performance remains a delicate balance that has not been optimally resolved in existing implementations.
Cross-platform compatibility represents a persistent challenge, with HALs typically designed for specific operating systems or hardware architectures. This limitation restricts the portability of robotic software and increases development costs when targeting multiple platforms. The absence of truly platform-agnostic HALs forces developers to maintain multiple codebases or implement complex adaptation layers.
Legacy system integration presents significant obstacles, as many industrial robotic systems rely on outdated hardware and software that lack modern interface capabilities. Creating HALs that can bridge these legacy systems with newer components requires complex translation mechanisms that are often brittle and inefficient.
Security vulnerabilities have emerged as a growing concern in robotic HALs. Many existing implementations prioritized functionality over security, resulting in abstraction layers with insufficient authentication, encryption, and access control mechanisms. As robots become more connected and deployed in sensitive environments, these security weaknesses present significant risks.
Documentation and developer support for many HAL implementations remain inadequate, with sparse API documentation, limited code examples, and few comprehensive tutorials. This knowledge gap increases the learning curve for new developers and slows adoption across the robotics community.
Finally, the resource constraints of embedded systems commonly used in robotics create significant design challenges for HAL implementations. Balancing the need for hardware abstraction with the limited memory, processing power, and energy available on these platforms requires careful optimization that current solutions have not fully achieved.
Current HAL Implementation Approaches
01 Hardware Abstraction Layer Architecture for System Modularity
Hardware abstraction layers (HALs) provide a standardized interface between hardware and software components, enabling system modularity. This architecture allows software applications to interact with hardware through a consistent API, regardless of the underlying hardware specifics. By separating hardware-specific code from application logic, HALs facilitate easier system updates, maintenance, and portability across different hardware platforms.- Modular HAL architecture for cross-platform compatibility: Hardware Abstraction Layers (HALs) can be designed with a modular architecture to enable software applications to run across different hardware platforms without modification. This approach separates hardware-specific code from application logic, allowing developers to create platform-independent software. The modular design facilitates easier maintenance and updates as hardware components change, while maintaining consistent interfaces for higher-level software layers.
- HAL implementation for embedded systems and IoT devices: Specialized HAL implementations for resource-constrained environments like embedded systems and IoT devices focus on optimizing performance while maintaining modularity. These implementations provide efficient interfaces to hardware components such as sensors, actuators, and communication modules while minimizing memory footprint and processing overhead. The modular approach allows for selective inclusion of only necessary hardware drivers, reducing system complexity and resource usage.
- Virtualization and abstraction techniques in HAL design: Advanced HAL designs incorporate virtualization techniques to further enhance modularity and flexibility. These approaches create virtual hardware interfaces that can be mapped to different physical implementations, enabling hardware independence at the application level. The virtualization layer allows for dynamic reconfiguration of hardware resources, fault isolation, and can facilitate testing and simulation of software on virtual hardware before deployment to physical systems.
- HAL modularity for network and communication systems: HAL implementations for networking and communication systems focus on abstracting the complexities of various communication protocols and hardware interfaces. These modular designs allow applications to interact with different network technologies through consistent interfaces. The abstraction layer handles protocol translations, timing requirements, and hardware-specific configurations while presenting a unified API to higher-level software, enabling seamless integration of diverse communication technologies.
- Testing and verification methodologies for modular HALs: Specialized testing and verification methodologies have been developed for ensuring the reliability and correctness of modular HAL implementations. These approaches include automated testing frameworks that can verify HAL functionality across different hardware configurations, boundary testing for hardware-software interfaces, and simulation environments that can emulate hardware behavior. The modular nature of well-designed HALs facilitates component-level testing and integration testing with minimal dependencies.
02 HAL Implementation in Operating Systems and Embedded Devices
Hardware abstraction layers are implemented in various operating systems and embedded devices to enhance modularity and portability. These implementations provide standardized interfaces for accessing hardware resources such as processors, memory, and peripherals. By abstracting hardware-specific details, operating systems can maintain consistent functionality across different hardware configurations, allowing for more efficient development and deployment of software applications.Expand Specific Solutions03 HAL-based Testing and Validation Frameworks
Hardware abstraction layers enable the development of testing and validation frameworks that can operate independently of specific hardware implementations. These frameworks allow for comprehensive testing of software components without requiring physical hardware, using simulated or virtualized hardware interfaces instead. This approach enhances modularity by separating the testing process from hardware dependencies, resulting in more efficient and thorough validation procedures.Expand Specific Solutions04 Network and Communication Protocol Abstraction
Hardware abstraction layers for network and communication protocols provide modular interfaces that abstract the complexities of various communication technologies. These HALs enable applications to interact with different network hardware using standardized APIs, facilitating interoperability and portability. By isolating protocol-specific details from application code, these abstraction layers allow for easier adaptation to new communication technologies and standards.Expand Specific Solutions05 Virtualization and Cloud Infrastructure HAL
Hardware abstraction layers play a crucial role in virtualization and cloud infrastructure by providing modular interfaces between virtual machines and physical hardware. These HALs enable the efficient allocation and management of hardware resources across multiple virtual instances, enhancing system flexibility and scalability. By abstracting hardware details, virtualization HALs facilitate the migration of workloads between different physical servers and cloud environments without requiring application modifications.Expand Specific Solutions
Key Industry Players in Modular Robotics
The Hardware Abstraction Layer (HAL) for modular robotic synthesis workflows market is in an early growth phase, characterized by increasing adoption but still evolving standardization. The market is projected to expand significantly as robotics applications proliferate across industries, with an estimated compound annual growth rate of 15-20%. Technologically, the field shows varying maturity levels, with companies like Intel, Siemens, and IBM leading with established HAL frameworks for industrial applications. Synopsys and Microsoft are advancing integration with design automation tools, while specialized robotics firms like iRobot and Humatics focus on application-specific implementations. Academic institutions such as University of Florida and Beihang University are contributing fundamental research, while emerging players from China including Wingtech and Shanghai Yogo Robot are rapidly developing competitive solutions targeting cost-effective implementation.
Intel Corp.
Technical Solution: Intel has developed a sophisticated Hardware Abstraction Layer framework for robotics through their Intel RealSense Robotics Development Kit and OpenVINO toolkit. Their HAL architecture provides a unified interface for accessing diverse hardware accelerators (CPUs, GPUs, VPUs, and FPGAs) through a common API, enabling seamless deployment of AI and computer vision workloads across heterogeneous computing platforms. The framework implements a layered approach with hardware-specific drivers at the lowest level, a hardware abstraction middleware layer, and application-facing APIs at the highest level. Intel's implementation emphasizes performance optimization through specialized hardware acceleration while maintaining software portability. Their HAL includes advanced features such as automatic workload balancing across available compute resources, power management optimizations, and support for time-critical operations through real-time extensions. The architecture enables modular integration of sensors, actuators, and processing units while providing standardized interfaces for robot operating systems like ROS and ROS2.
Strengths: Exceptional performance optimization across heterogeneous computing platforms; robust support for AI and computer vision workloads; extensive ecosystem integration with major robotics frameworks. Weaknesses: Stronger focus on computation and perception than on mechanical abstraction; optimal performance typically requires Intel hardware components.
International Business Machines Corp.
Technical Solution: IBM has developed a comprehensive Hardware Abstraction Layer framework for modular robotics through their IBM Automation platform and Watson IoT services. Their HAL architecture implements a microservices-based approach where hardware components are abstracted as containerized services with standardized APIs, enabling flexible deployment across diverse robotic platforms. The framework employs a multi-tiered architecture with hardware-specific adapters at the lowest level, a middleware layer for resource management and orchestration, and high-level interfaces for application development. IBM's implementation leverages their expertise in cloud computing to create a distributed HAL that can span edge devices and cloud infrastructure, enabling sophisticated workload distribution and scalability. Their HAL includes advanced features such as automated discovery and configuration of robotic components, real-time monitoring and analytics, and AI-driven predictive maintenance capabilities. The architecture supports secure communication between components through enterprise-grade encryption and authentication mechanisms.
Strengths: Exceptional integration with enterprise systems and cloud infrastructure; robust security features for industrial applications; advanced analytics capabilities for system optimization. Weaknesses: Higher complexity and resource requirements compared to more lightweight solutions; potentially less suitable for resource-constrained embedded systems.
Core HAL Technologies and Patents
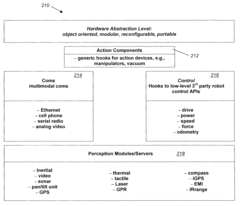
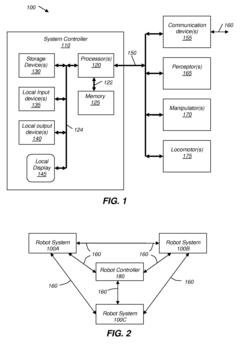
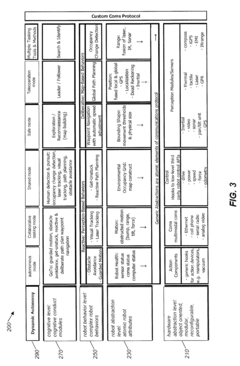
Generic robot architecture
PatentActiveUS7801644B2
Innovation
- A generic robot architecture with a hardware abstraction level and a robot abstraction level that provides portable hardware and behavioral abstractions, enabling seamless porting of behaviors across platforms and allowing for dynamic autonomy levels.

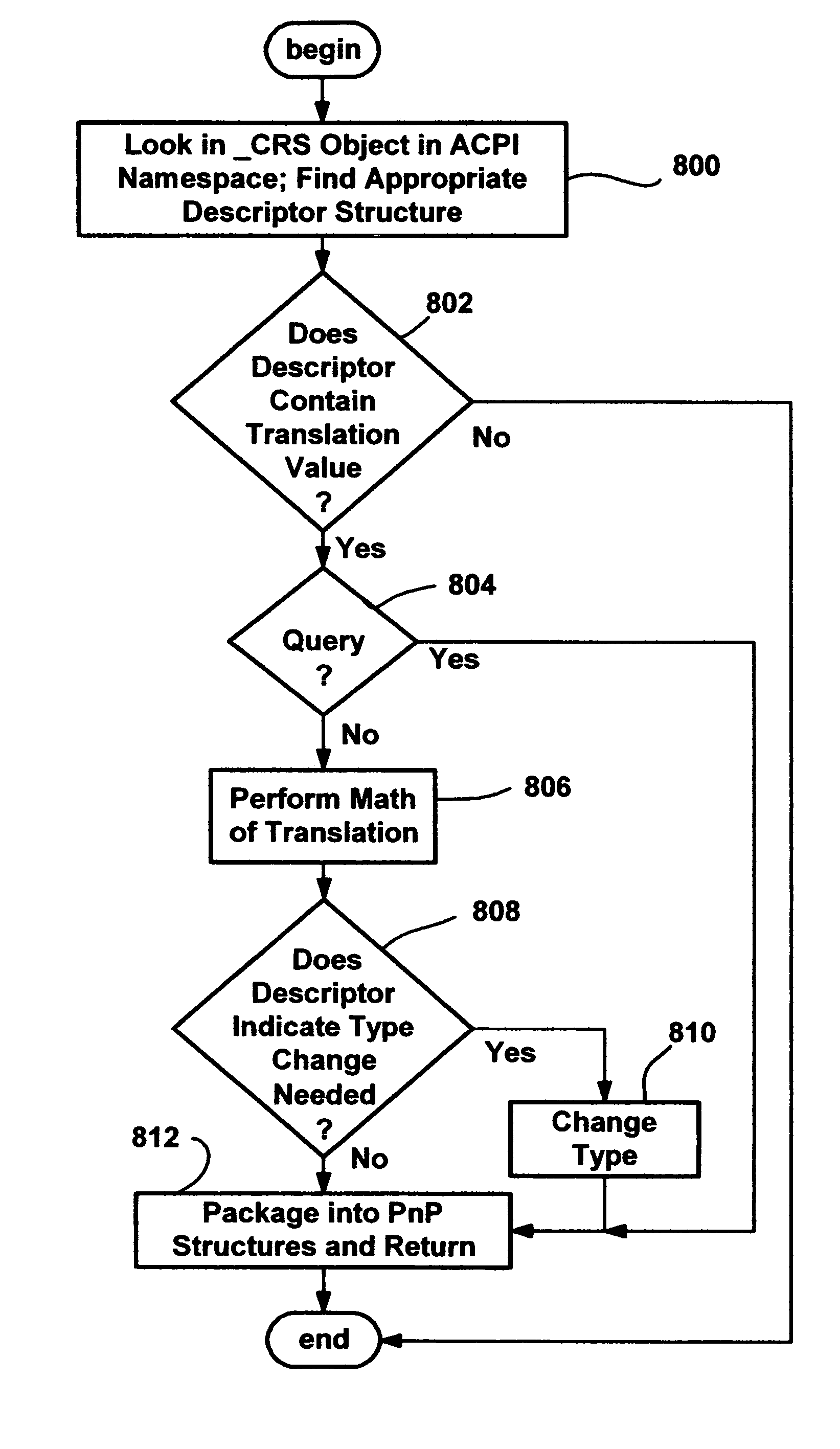
Dynamically configuring resources for cycle translation in a computer system
PatentInactiveUS20050198596A1
Innovation
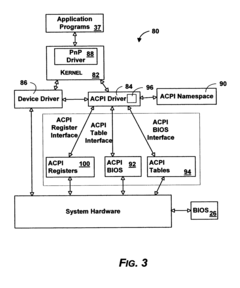
- The method involves removing the resource translation function from the HAL and using the Advanced Configuration and Power Interface (ACPI) specification to dynamically determine resource translation for each piece of hardware, allowing the ACPI driver to interpret firmware information and provide translation mechanisms outside the HAL, enabling customized machines to operate with arbitrary bus architectures.
Standardization Efforts in Robotic HAL
The standardization landscape for Hardware Abstraction Layers (HALs) in robotics has evolved significantly over the past decade, with several major initiatives emerging to address interoperability challenges. The Robot Operating System (ROS) has pioneered one of the most widely adopted HAL frameworks, with its hardware_interface package providing standardized access to various robot components. This framework has become a de facto standard in research environments, enabling developers to write hardware-agnostic control algorithms.
In the industrial sector, the OPC Unified Architecture (OPC UA) has gained traction as a communication protocol standard that includes hardware abstraction capabilities. The OPC UA Companion Specification for Robotics, developed in collaboration with major robot manufacturers, defines standardized information models for robot systems, facilitating vendor-neutral integration.
The International Organization for Standardization (ISO) has also contributed through ISO/TS 15066 and ISO 10218, which, while primarily focused on safety, include specifications for hardware interfaces that impact HAL design requirements. These standards ensure that HALs can properly expose safety-critical hardware features in a consistent manner.
More recently, the Open-RMF (Open Robotics Middleware Framework) initiative has been working to standardize interfaces between different robotic systems, with HAL compatibility as a core consideration. This effort aims to enable seamless integration of robots from different manufacturers in shared workspaces.
The Robotics Industry Association (RIA) has established working groups specifically focused on HAL standardization, bringing together industry stakeholders to define common interfaces for modular robotic systems. Their work has resulted in preliminary guidelines for HAL implementation that support plug-and-play capabilities across different robot platforms.
In Europe, the euRobotics association has launched the ROSIN (ROS-Industrial Quality-Assured Robot Software Components) project, which includes standardization of hardware interfaces as a key objective. This initiative has produced reference implementations of HALs that comply with European industrial standards.
The IEEE Robotics and Automation Society has formed the P1872 Working Group on Ontologies for Robotics and Automation, which addresses standardized representations of hardware capabilities that can be leveraged by HAL implementations. This work provides a semantic foundation for describing hardware components in a vendor-neutral manner.
Despite these efforts, full standardization remains challenging due to proprietary interests and the rapid pace of technological innovation in robotics. The tension between establishing stable standards and accommodating emerging technologies continues to shape the evolution of HAL standardization efforts.
In the industrial sector, the OPC Unified Architecture (OPC UA) has gained traction as a communication protocol standard that includes hardware abstraction capabilities. The OPC UA Companion Specification for Robotics, developed in collaboration with major robot manufacturers, defines standardized information models for robot systems, facilitating vendor-neutral integration.
The International Organization for Standardization (ISO) has also contributed through ISO/TS 15066 and ISO 10218, which, while primarily focused on safety, include specifications for hardware interfaces that impact HAL design requirements. These standards ensure that HALs can properly expose safety-critical hardware features in a consistent manner.
More recently, the Open-RMF (Open Robotics Middleware Framework) initiative has been working to standardize interfaces between different robotic systems, with HAL compatibility as a core consideration. This effort aims to enable seamless integration of robots from different manufacturers in shared workspaces.
The Robotics Industry Association (RIA) has established working groups specifically focused on HAL standardization, bringing together industry stakeholders to define common interfaces for modular robotic systems. Their work has resulted in preliminary guidelines for HAL implementation that support plug-and-play capabilities across different robot platforms.
In Europe, the euRobotics association has launched the ROSIN (ROS-Industrial Quality-Assured Robot Software Components) project, which includes standardization of hardware interfaces as a key objective. This initiative has produced reference implementations of HALs that comply with European industrial standards.
The IEEE Robotics and Automation Society has formed the P1872 Working Group on Ontologies for Robotics and Automation, which addresses standardized representations of hardware capabilities that can be leveraged by HAL implementations. This work provides a semantic foundation for describing hardware components in a vendor-neutral manner.
Despite these efforts, full standardization remains challenging due to proprietary interests and the rapid pace of technological innovation in robotics. The tension between establishing stable standards and accommodating emerging technologies continues to shape the evolution of HAL standardization efforts.
Cross-Platform Compatibility Solutions
Cross-platform compatibility represents a critical challenge in hardware abstraction layers (HALs) for modular robotic systems. The diversity of hardware components, operating systems, and communication protocols across different robotic platforms necessitates robust compatibility solutions to ensure seamless integration and operation. Current industry approaches focus on developing standardized interfaces that can bridge disparate hardware ecosystems while maintaining performance integrity.
Leading solutions in this domain implement multi-layered abstraction architectures that separate hardware-specific code from application logic. The Robot Operating System (ROS) exemplifies this approach through its hardware_interface package, which provides a unified API for controlling various robot components regardless of their underlying hardware implementation. Similarly, OROCOS (Open Robot Control Software) offers platform-independent components that can be deployed across different operating systems and hardware configurations.
Containerization technologies have emerged as powerful enablers for cross-platform compatibility. Docker and similar platforms allow developers to package robotic applications with their dependencies, ensuring consistent behavior across development, testing, and production environments. This approach significantly reduces "works on my machine" problems that frequently plague complex robotic systems spanning multiple hardware platforms.
Protocol translation layers represent another vital compatibility solution, facilitating communication between systems using different protocols. These translation mechanisms convert data formats and communication patterns between proprietary and open standards, enabling heterogeneous components to interact effectively. Examples include bridges between EtherCAT, CAN, and Modbus protocols, allowing robots to incorporate components from various manufacturers.
Hardware abstraction frameworks like MRPT (Mobile Robot Programming Toolkit) and OpenCV provide platform-agnostic interfaces for sensors and actuators, enabling developers to write code once and deploy it across multiple robot platforms. These frameworks handle low-level hardware differences while exposing consistent APIs to higher-level applications.
Virtual hardware interfaces offer simulation capabilities that allow testing of robotic applications across different virtual hardware configurations before deployment on physical systems. Gazebo, Webots, and NVIDIA Isaac Sim provide physics-accurate simulations that can validate cross-platform compatibility without physical hardware, accelerating development cycles and reducing costs.
The industry is moving toward standardized middleware solutions that provide comprehensive cross-platform support. DDS (Data Distribution Service) implementations like FastRTPS and OpenDDS offer real-time, reliable communication across heterogeneous systems, becoming foundational elements in modern robotic architectures that must operate across diverse hardware ecosystems.
Leading solutions in this domain implement multi-layered abstraction architectures that separate hardware-specific code from application logic. The Robot Operating System (ROS) exemplifies this approach through its hardware_interface package, which provides a unified API for controlling various robot components regardless of their underlying hardware implementation. Similarly, OROCOS (Open Robot Control Software) offers platform-independent components that can be deployed across different operating systems and hardware configurations.
Containerization technologies have emerged as powerful enablers for cross-platform compatibility. Docker and similar platforms allow developers to package robotic applications with their dependencies, ensuring consistent behavior across development, testing, and production environments. This approach significantly reduces "works on my machine" problems that frequently plague complex robotic systems spanning multiple hardware platforms.
Protocol translation layers represent another vital compatibility solution, facilitating communication between systems using different protocols. These translation mechanisms convert data formats and communication patterns between proprietary and open standards, enabling heterogeneous components to interact effectively. Examples include bridges between EtherCAT, CAN, and Modbus protocols, allowing robots to incorporate components from various manufacturers.
Hardware abstraction frameworks like MRPT (Mobile Robot Programming Toolkit) and OpenCV provide platform-agnostic interfaces for sensors and actuators, enabling developers to write code once and deploy it across multiple robot platforms. These frameworks handle low-level hardware differences while exposing consistent APIs to higher-level applications.
Virtual hardware interfaces offer simulation capabilities that allow testing of robotic applications across different virtual hardware configurations before deployment on physical systems. Gazebo, Webots, and NVIDIA Isaac Sim provide physics-accurate simulations that can validate cross-platform compatibility without physical hardware, accelerating development cycles and reducing costs.
The industry is moving toward standardized middleware solutions that provide comprehensive cross-platform support. DDS (Data Distribution Service) implementations like FastRTPS and OpenDDS offer real-time, reliable communication across heterogeneous systems, becoming foundational elements in modern robotic architectures that must operate across diverse hardware ecosystems.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!