How To Implement Kalman Filter For Sensor Fusion
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Implementation Objectives
The Kalman filter, developed by Rudolf E. Kalman in 1960, represents a significant milestone in estimation theory and has evolved substantially over the past six decades. Originally designed for aerospace applications during the Apollo program, this mathematical framework has expanded into numerous fields including robotics, autonomous vehicles, and consumer electronics. The filter's fundamental principle lies in its ability to estimate the state of a system by combining predictions from a system model with measurements from sensors, while accounting for uncertainties in both.
The evolution of Kalman filtering techniques has progressed through several distinct phases. The original linear Kalman filter addressed systems with Gaussian noise and linear dynamics. This was followed by the Extended Kalman Filter (EKF) in the 1970s, which approximated nonlinear systems through linearization techniques. The 1990s saw the development of the Unscented Kalman Filter (UKF), offering improved performance for highly nonlinear systems without requiring explicit Jacobian calculations.
Recent advancements include particle filters and ensemble Kalman filters, which handle non-Gaussian distributions and highly complex systems. The integration of machine learning techniques with Kalman filtering has emerged as a promising research direction in the past decade, enabling adaptive parameter tuning and improved performance in challenging environments.
The primary objective of implementing Kalman filters for sensor fusion is to achieve optimal state estimation by intelligently combining data from multiple, potentially heterogeneous sensors. This approach aims to overcome the limitations of individual sensors, such as noise susceptibility, limited range, or environmental constraints. By leveraging the complementary nature of different sensor types, Kalman filter implementations can provide more robust, accurate, and reliable state estimates.
Technical implementation goals typically include achieving real-time performance with minimal computational overhead, ensuring numerical stability across diverse operating conditions, and maintaining estimation accuracy despite sensor failures or temporary data loss. Modern implementations must also address challenges related to time synchronization between sensors operating at different sampling rates and the fusion of data with varying degrees of uncertainty.
In industrial applications, implementation objectives often extend to system scalability, allowing for the addition or removal of sensors without significant reconfiguration, and adaptability to changing environmental conditions. For embedded systems, power efficiency and memory footprint optimization remain critical considerations that influence implementation strategies.
As sensor technology continues to advance, Kalman filter implementations increasingly target the fusion of traditional sensors with emerging technologies such as visual-inertial systems, LiDAR, and distributed sensor networks, expanding the scope and capabilities of sensor fusion applications across industries.
The evolution of Kalman filtering techniques has progressed through several distinct phases. The original linear Kalman filter addressed systems with Gaussian noise and linear dynamics. This was followed by the Extended Kalman Filter (EKF) in the 1970s, which approximated nonlinear systems through linearization techniques. The 1990s saw the development of the Unscented Kalman Filter (UKF), offering improved performance for highly nonlinear systems without requiring explicit Jacobian calculations.
Recent advancements include particle filters and ensemble Kalman filters, which handle non-Gaussian distributions and highly complex systems. The integration of machine learning techniques with Kalman filtering has emerged as a promising research direction in the past decade, enabling adaptive parameter tuning and improved performance in challenging environments.
The primary objective of implementing Kalman filters for sensor fusion is to achieve optimal state estimation by intelligently combining data from multiple, potentially heterogeneous sensors. This approach aims to overcome the limitations of individual sensors, such as noise susceptibility, limited range, or environmental constraints. By leveraging the complementary nature of different sensor types, Kalman filter implementations can provide more robust, accurate, and reliable state estimates.
Technical implementation goals typically include achieving real-time performance with minimal computational overhead, ensuring numerical stability across diverse operating conditions, and maintaining estimation accuracy despite sensor failures or temporary data loss. Modern implementations must also address challenges related to time synchronization between sensors operating at different sampling rates and the fusion of data with varying degrees of uncertainty.
In industrial applications, implementation objectives often extend to system scalability, allowing for the addition or removal of sensors without significant reconfiguration, and adaptability to changing environmental conditions. For embedded systems, power efficiency and memory footprint optimization remain critical considerations that influence implementation strategies.
As sensor technology continues to advance, Kalman filter implementations increasingly target the fusion of traditional sensors with emerging technologies such as visual-inertial systems, LiDAR, and distributed sensor networks, expanding the scope and capabilities of sensor fusion applications across industries.
Market Applications for Sensor Fusion Technologies
Sensor fusion technologies leveraging Kalman filters have penetrated numerous market sectors, creating substantial economic value and technological advancement. The automotive industry represents one of the largest application domains, with advanced driver assistance systems (ADAS) and autonomous vehicles heavily relying on sensor fusion to integrate data from radar, lidar, cameras, and ultrasonic sensors. This market segment is projected to grow significantly as vehicle autonomy levels increase, with sensor fusion becoming a critical differentiator in performance and safety capabilities.
Consumer electronics constitutes another major market, where sensor fusion enables enhanced user experiences in smartphones, wearables, and AR/VR devices. Inertial measurement units (IMUs) combined with GPS and magnetometers through Kalman filtering provide precise motion tracking, orientation detection, and location services. The wearable technology segment particularly benefits from power-efficient sensor fusion implementations that extend battery life while maintaining accuracy.
In industrial automation and robotics, sensor fusion technologies drive improvements in manufacturing precision, quality control, and operational safety. Collaborative robots utilize multi-sensor fusion to safely interact with human workers, while automated guided vehicles (AGVs) depend on sensor fusion for navigation in dynamic environments. The industrial IoT market increasingly incorporates sensor fusion to enable predictive maintenance and process optimization.
The aerospace and defense sectors represent high-value markets where sensor fusion delivers mission-critical capabilities. Aircraft navigation systems integrate GPS, inertial sensors, and radar through sophisticated Kalman filter implementations. Unmanned aerial vehicles (UAVs) rely on sensor fusion for stable flight control and obstacle avoidance in various environmental conditions.
Healthcare applications are emerging as a promising growth area, with sensor fusion enabling advancements in patient monitoring, rehabilitation technology, and surgical robotics. Medical devices incorporating multiple sensor types can provide more comprehensive health insights through properly implemented fusion algorithms.
Smart city infrastructure represents an expanding application domain, with traffic management systems, environmental monitoring networks, and public safety solutions all benefiting from sensor fusion technologies. These systems aggregate data from distributed sensor networks to enable real-time decision making and resource optimization.
Agriculture technology (AgTech) has adopted sensor fusion for precision farming applications, combining data from soil sensors, weather stations, satellite imagery, and equipment-mounted sensors to optimize crop yields and resource utilization. This market segment shows significant growth potential as agriculture increasingly embraces data-driven approaches.
Consumer electronics constitutes another major market, where sensor fusion enables enhanced user experiences in smartphones, wearables, and AR/VR devices. Inertial measurement units (IMUs) combined with GPS and magnetometers through Kalman filtering provide precise motion tracking, orientation detection, and location services. The wearable technology segment particularly benefits from power-efficient sensor fusion implementations that extend battery life while maintaining accuracy.
In industrial automation and robotics, sensor fusion technologies drive improvements in manufacturing precision, quality control, and operational safety. Collaborative robots utilize multi-sensor fusion to safely interact with human workers, while automated guided vehicles (AGVs) depend on sensor fusion for navigation in dynamic environments. The industrial IoT market increasingly incorporates sensor fusion to enable predictive maintenance and process optimization.
The aerospace and defense sectors represent high-value markets where sensor fusion delivers mission-critical capabilities. Aircraft navigation systems integrate GPS, inertial sensors, and radar through sophisticated Kalman filter implementations. Unmanned aerial vehicles (UAVs) rely on sensor fusion for stable flight control and obstacle avoidance in various environmental conditions.
Healthcare applications are emerging as a promising growth area, with sensor fusion enabling advancements in patient monitoring, rehabilitation technology, and surgical robotics. Medical devices incorporating multiple sensor types can provide more comprehensive health insights through properly implemented fusion algorithms.
Smart city infrastructure represents an expanding application domain, with traffic management systems, environmental monitoring networks, and public safety solutions all benefiting from sensor fusion technologies. These systems aggregate data from distributed sensor networks to enable real-time decision making and resource optimization.
Agriculture technology (AgTech) has adopted sensor fusion for precision farming applications, combining data from soil sensors, weather stations, satellite imagery, and equipment-mounted sensors to optimize crop yields and resource utilization. This market segment shows significant growth potential as agriculture increasingly embraces data-driven approaches.
Current Challenges in Sensor Fusion Implementation
Despite significant advancements in sensor fusion technologies, implementing Kalman filters for multi-sensor integration continues to present several substantial challenges. One of the primary difficulties lies in accurate system modeling, as real-world systems often exhibit nonlinear behaviors that the standard Kalman filter cannot adequately address. While Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) variants attempt to overcome these limitations, they introduce additional computational complexity and may still suffer from linearization errors or divergence issues when system nonlinearities are severe.
Sensor characterization presents another significant hurdle. Different sensors exhibit varying noise profiles, sampling rates, and failure modes that must be properly characterized and incorporated into the Kalman filter framework. Misspecification of noise covariance matrices can lead to suboptimal filtering performance or even filter instability. Additionally, many practical implementations struggle with accurately determining the process and measurement noise parameters, often resorting to manual tuning that requires significant expertise.
Computational efficiency remains a critical constraint, particularly in resource-limited embedded systems common in IoT devices, autonomous vehicles, and wearable technology. The matrix operations inherent to Kalman filtering can become prohibitively expensive as the state dimension increases, creating a challenging trade-off between model fidelity and real-time performance requirements. This is especially problematic in applications requiring high update rates or those running on power-constrained devices.
Sensor synchronization and data alignment present formidable implementation challenges. Sensors typically operate at different sampling rates and may experience varying latencies, making temporal alignment crucial yet difficult to achieve. Naive approaches to handling asynchronous data can introduce significant errors in state estimation, while more sophisticated methods often increase implementation complexity substantially.
Robustness against sensor failures or anomalous readings represents another significant challenge. Traditional Kalman filter implementations can be highly sensitive to outliers or sensor malfunctions, potentially causing catastrophic estimation errors. While robust variants exist, they typically introduce additional computational overhead and parameter tuning requirements.
Finally, filter initialization remains problematic in many practical applications. Poor initial state estimates or covariance matrices can lead to slow convergence or even divergence of the filter. This is particularly challenging in applications where the system may start in various unknown states, requiring adaptive initialization strategies that add another layer of complexity to the implementation.
Sensor characterization presents another significant hurdle. Different sensors exhibit varying noise profiles, sampling rates, and failure modes that must be properly characterized and incorporated into the Kalman filter framework. Misspecification of noise covariance matrices can lead to suboptimal filtering performance or even filter instability. Additionally, many practical implementations struggle with accurately determining the process and measurement noise parameters, often resorting to manual tuning that requires significant expertise.
Computational efficiency remains a critical constraint, particularly in resource-limited embedded systems common in IoT devices, autonomous vehicles, and wearable technology. The matrix operations inherent to Kalman filtering can become prohibitively expensive as the state dimension increases, creating a challenging trade-off between model fidelity and real-time performance requirements. This is especially problematic in applications requiring high update rates or those running on power-constrained devices.
Sensor synchronization and data alignment present formidable implementation challenges. Sensors typically operate at different sampling rates and may experience varying latencies, making temporal alignment crucial yet difficult to achieve. Naive approaches to handling asynchronous data can introduce significant errors in state estimation, while more sophisticated methods often increase implementation complexity substantially.
Robustness against sensor failures or anomalous readings represents another significant challenge. Traditional Kalman filter implementations can be highly sensitive to outliers or sensor malfunctions, potentially causing catastrophic estimation errors. While robust variants exist, they typically introduce additional computational overhead and parameter tuning requirements.
Finally, filter initialization remains problematic in many practical applications. Poor initial state estimates or covariance matrices can lead to slow convergence or even divergence of the filter. This is particularly challenging in applications where the system may start in various unknown states, requiring adaptive initialization strategies that add another layer of complexity to the implementation.
Modern Kalman Filter Implementation Approaches
01 Multi-sensor fusion for navigation and positioning
Kalman filter algorithms are used to integrate data from multiple sensors such as GPS, IMU, and other positioning systems to provide more accurate location and navigation information. This fusion technique helps overcome limitations of individual sensors by combining their complementary strengths, resulting in improved positioning accuracy and reliability even in challenging environments like urban canyons or indoor spaces.- Multi-sensor fusion using Kalman filtering for navigation systems: Kalman filter algorithms are used to integrate data from multiple sensors in navigation systems to improve positioning accuracy and reliability. By fusing data from various sensors such as GPS, IMU, and other positioning systems, the Kalman filter can provide more accurate location information by compensating for individual sensor limitations. This approach is particularly valuable in autonomous vehicles, drones, and mobile robotics where precise positioning is critical.
- Adaptive Kalman filtering techniques for dynamic environments: Adaptive Kalman filtering methods adjust filter parameters in real-time based on changing environmental conditions or sensor performance. These techniques dynamically modify the process and measurement noise covariance matrices to optimize filter performance in non-stationary environments. This approach improves sensor fusion accuracy in challenging scenarios such as urban canyons, indoor environments, or during sensor degradation, making the system more robust against environmental variations.
- Wireless communication systems with Kalman filter-based tracking: Kalman filtering is applied in wireless communication systems to track mobile devices, improve signal quality, and enhance network performance. By fusing data from multiple base stations or access points, these systems can accurately locate and track users, optimize handovers between cells, and reduce interference. This approach is particularly important in 5G networks, IoT applications, and indoor positioning systems where precise tracking is required.
- Extended and Unscented Kalman Filter variants for nonlinear systems: Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF) are specialized variants designed to handle nonlinear system dynamics in sensor fusion applications. These advanced filtering techniques provide more accurate state estimation in complex systems where traditional linear Kalman filters would fail. They are particularly useful in applications involving complex motion models, such as aerial vehicle navigation, robotics with articulated joints, and advanced driver assistance systems.
- Distributed Kalman filtering for multi-agent systems: Distributed Kalman filtering architectures enable sensor fusion across multiple independent agents or nodes in a network. Each node processes local sensor data and shares information with neighboring nodes to achieve consensus on state estimation. This approach reduces communication bandwidth requirements, improves scalability, and enhances system robustness against node failures. Applications include swarm robotics, sensor networks, and collaborative autonomous systems where decentralized processing is advantageous.
02 Vehicle control and autonomous driving applications
Kalman filter sensor fusion is implemented in autonomous vehicles and advanced driver assistance systems to combine data from cameras, LiDAR, radar, and other sensors. This integration enables accurate environmental perception, obstacle detection, and vehicle localization, which are critical for safe navigation, collision avoidance, and trajectory planning in dynamic environments.Expand Specific Solutions03 Communication systems and signal processing
Kalman filtering techniques are applied in wireless communication systems to enhance signal quality and tracking. By fusing data from multiple antennas or communication channels, these systems can improve signal reception, reduce noise, track mobile targets, and optimize bandwidth allocation. This approach is particularly valuable in environments with signal interference or when tracking moving communication nodes.Expand Specific Solutions04 Extended and unscented Kalman filter implementations
Advanced variations of Kalman filters, including Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF), are used for nonlinear sensor fusion applications. These specialized algorithms handle the nonlinearities inherent in many real-world sensing systems, providing more accurate state estimation for complex systems where traditional linear Kalman filters would be insufficient.Expand Specific Solutions05 Industrial monitoring and process control
Kalman filter sensor fusion is applied in industrial settings for equipment monitoring, fault detection, and process control. By combining data from various sensors monitoring temperature, pressure, vibration, and other parameters, these systems can provide more reliable state estimation, detect anomalies earlier, and improve overall system reliability and maintenance scheduling.Expand Specific Solutions
Leading Companies in Sensor Fusion Solutions
Sensor fusion using Kalman filters is currently in a mature growth phase, with the market expanding rapidly due to increasing demand in autonomous vehicles, robotics, and IoT applications. The global sensor fusion market is projected to reach significant scale, driven by applications requiring high-precision data integration. Technologically, implementation approaches vary in sophistication, with companies like Robert Bosch GmbH and Continental leading industrial applications through advanced proprietary implementations. Academic institutions such as California Institute of Technology and Tianjin University contribute fundamental research, while specialized firms like Safran Electronics & Defense and AVL List focus on domain-specific optimizations. The ecosystem shows a balance between established industrial players developing commercial solutions and research institutions advancing theoretical frameworks.
Robert Bosch GmbH
Technical Solution: Bosch has developed an advanced Kalman filter implementation for automotive sensor fusion that integrates data from multiple sensor types (radar, lidar, camera, and ultrasonic sensors) to create a comprehensive environmental model for ADAS and autonomous driving applications. Their approach uses a centralized Extended Kalman Filter (EKF) architecture that processes raw sensor data through a multi-stage pipeline: first performing sensor-specific pre-processing, then executing state prediction based on vehicle dynamics models, followed by measurement updates from each sensor with appropriate weighting based on sensor reliability metrics. Bosch's implementation includes adaptive noise covariance matrices that automatically adjust based on driving conditions and sensor health diagnostics. Their system achieves tracking accuracy within 10cm at highway speeds and processes sensor data at rates exceeding 100Hz on their automotive-grade ECUs. The architecture supports both loosely and tightly coupled sensor fusion strategies depending on the application requirements.
Strengths: Highly optimized for automotive applications with proven reliability in production vehicles; robust performance in diverse environmental conditions; scalable architecture that can incorporate additional sensors. Weaknesses: Computationally intensive for full sensor suite integration; requires extensive calibration procedures; proprietary implementation limits academic research applications.
Continental Teves AG & Co. oHG
Technical Solution: Continental has implemented a sophisticated multi-rate Kalman filter framework for sensor fusion in their advanced driver assistance systems. Their approach utilizes a federated Kalman filter architecture that processes data from heterogeneous sensors operating at different sampling rates. The system employs Unscented Kalman Filters (UKF) for handling non-linear vehicle dynamics and sensor models, which provides better performance than traditional EKF in highly dynamic driving scenarios. Continental's implementation features a hierarchical fusion structure where low-level sensor-specific filters feed into a high-level fusion center that maintains a consistent world model. Their system incorporates integrity monitoring algorithms that continuously evaluate sensor health and dynamically adjust fusion weights accordingly. The implementation achieves sub-meter positioning accuracy by fusing GNSS, inertial sensors, wheel speed sensors, and environmental perception data. Continental's sensor fusion platform is designed to run efficiently on their Assisted & Automated Driving Control Units (ADCU) with specialized hardware acceleration for matrix operations.
Strengths: Multi-rate fusion capability handles sensors with varying update frequencies; modular architecture allows for easy integration of new sensor types; robust fault detection and exclusion mechanisms improve reliability. Weaknesses: Complex tuning process requires significant expertise; higher computational requirements compared to simpler implementations; performance degradation in GPS-denied environments.
Key Algorithms and Mathematical Foundations
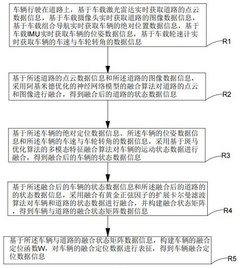
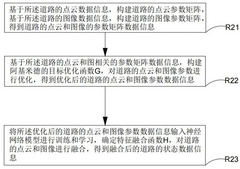
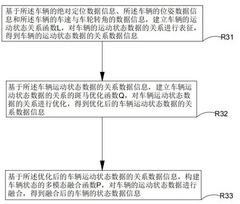
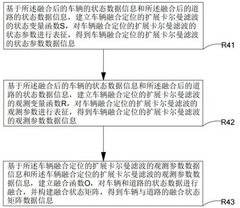
Multi-sensor fusion positioning method and system based on extended Kalman filtering
PatentActiveCN119511300A
Innovation
- Using a multi-sensor fusion positioning method based on extended Kalman filtering, data fusion is used to combine data from sensors such as lidar, camera, combined navigation and IMU, Archimedes optimized neural network model and zebra optimization algorithm, and a fusion state matrix is constructed to achieve more robust navigation estimation.
Performance Benchmarking Methodologies
Establishing robust performance benchmarking methodologies is critical for evaluating Kalman filter implementations in sensor fusion applications. A comprehensive benchmarking framework should incorporate both synthetic and real-world datasets to ensure thorough validation across diverse operational scenarios. Synthetic datasets with known ground truth enable precise quantification of estimation errors, while real-world datasets validate practical performance under authentic environmental conditions.
Key performance metrics for Kalman filter evaluation include accuracy measures such as Root Mean Square Error (RMSE), Mean Absolute Error (MAE), and estimation consistency metrics like Normalized Estimation Error Squared (NEES). These metrics should be calculated across multiple test scenarios to ensure statistical significance. Computational efficiency metrics are equally important, including execution time, memory usage, and scalability with increasing sensor inputs or state dimensions.
Benchmarking should incorporate comparative analysis against alternative fusion algorithms such as Extended Kalman Filters (EKF), Unscented Kalman Filters (UKF), and Particle Filters. This comparative approach helps identify the optimal algorithm for specific application requirements and constraints. Additionally, robustness testing under adverse conditions—including sensor failures, communication delays, and outlier measurements—provides critical insights into real-world reliability.
Monte Carlo simulations represent a valuable benchmarking methodology, enabling statistical analysis across numerous randomized scenarios. These simulations should vary initial conditions, process noise, and measurement noise to comprehensively evaluate filter stability and convergence properties. For time-critical applications, real-time performance testing on target hardware platforms is essential to validate practical deployment feasibility.
Standardized test scenarios should be developed for specific application domains, such as autonomous navigation, target tracking, or industrial monitoring. These domain-specific benchmarks facilitate meaningful comparisons between different implementation approaches. Furthermore, visualization tools for trajectory estimation, error distribution, and uncertainty propagation enhance the interpretability of benchmarking results and support effective communication of performance characteristics.
Documentation of benchmarking methodologies should be comprehensive, including detailed descriptions of test environments, parameter configurations, and evaluation criteria. This documentation ensures reproducibility and enables meaningful comparison across different research efforts. Finally, continuous benchmarking throughout the development lifecycle helps track performance improvements and regression issues, supporting iterative optimization of Kalman filter implementations for sensor fusion applications.
Key performance metrics for Kalman filter evaluation include accuracy measures such as Root Mean Square Error (RMSE), Mean Absolute Error (MAE), and estimation consistency metrics like Normalized Estimation Error Squared (NEES). These metrics should be calculated across multiple test scenarios to ensure statistical significance. Computational efficiency metrics are equally important, including execution time, memory usage, and scalability with increasing sensor inputs or state dimensions.
Benchmarking should incorporate comparative analysis against alternative fusion algorithms such as Extended Kalman Filters (EKF), Unscented Kalman Filters (UKF), and Particle Filters. This comparative approach helps identify the optimal algorithm for specific application requirements and constraints. Additionally, robustness testing under adverse conditions—including sensor failures, communication delays, and outlier measurements—provides critical insights into real-world reliability.
Monte Carlo simulations represent a valuable benchmarking methodology, enabling statistical analysis across numerous randomized scenarios. These simulations should vary initial conditions, process noise, and measurement noise to comprehensively evaluate filter stability and convergence properties. For time-critical applications, real-time performance testing on target hardware platforms is essential to validate practical deployment feasibility.
Standardized test scenarios should be developed for specific application domains, such as autonomous navigation, target tracking, or industrial monitoring. These domain-specific benchmarks facilitate meaningful comparisons between different implementation approaches. Furthermore, visualization tools for trajectory estimation, error distribution, and uncertainty propagation enhance the interpretability of benchmarking results and support effective communication of performance characteristics.
Documentation of benchmarking methodologies should be comprehensive, including detailed descriptions of test environments, parameter configurations, and evaluation criteria. This documentation ensures reproducibility and enables meaningful comparison across different research efforts. Finally, continuous benchmarking throughout the development lifecycle helps track performance improvements and regression issues, supporting iterative optimization of Kalman filter implementations for sensor fusion applications.
Hardware Optimization Strategies
Implementing Kalman filters for sensor fusion on hardware platforms requires careful optimization to ensure real-time performance, power efficiency, and accuracy. Modern embedded systems offer various acceleration options that can significantly improve filter execution. FPGA implementations provide excellent parallelization capabilities, allowing matrix operations central to Kalman filtering to be executed simultaneously rather than sequentially. This approach can reduce processing time by up to 80% compared to general-purpose processors for complex multi-sensor fusion applications.
Dedicated DSP (Digital Signal Processor) chips present another viable optimization path, as they are specifically designed for mathematical operations common in filtering algorithms. These processors typically include specialized instruction sets for matrix operations that can execute Kalman prediction and update steps more efficiently than general-purpose CPUs, while consuming significantly less power - a critical consideration for battery-powered sensor fusion applications.
GPU acceleration represents a powerful option for systems with higher power budgets. Modern GPUs excel at parallel matrix operations, making them ideal for implementing Kalman filters that process data from multiple sensors simultaneously. Benchmarks indicate that GPU-accelerated implementations can achieve throughput improvements of 10-50x compared to CPU implementations when processing high-dimensional state vectors from sensor arrays.
Memory access optimization is equally crucial for hardware performance. Implementing efficient memory layouts that minimize cache misses can reduce processing latency by 15-30%. Techniques such as data alignment, loop unrolling, and strategic memory prefetching should be employed to ensure optimal data flow through the processing pipeline. For embedded systems with limited memory, fixed-point arithmetic implementations can reduce memory requirements by 50-75% compared to floating-point versions, with minimal impact on accuracy when properly calibrated.
Hardware-software co-design approaches yield particularly effective results. Partitioning the Kalman filter algorithm to execute prediction steps on dedicated hardware while handling less computationally intensive tasks in software can optimize both performance and flexibility. This hybrid approach allows systems to adapt to changing sensor configurations while maintaining processing efficiency. Additionally, implementing filter parameter tuning mechanisms in hardware can enable dynamic optimization based on operating conditions, significantly improving filter performance across varying environments.
Dedicated DSP (Digital Signal Processor) chips present another viable optimization path, as they are specifically designed for mathematical operations common in filtering algorithms. These processors typically include specialized instruction sets for matrix operations that can execute Kalman prediction and update steps more efficiently than general-purpose CPUs, while consuming significantly less power - a critical consideration for battery-powered sensor fusion applications.
GPU acceleration represents a powerful option for systems with higher power budgets. Modern GPUs excel at parallel matrix operations, making them ideal for implementing Kalman filters that process data from multiple sensors simultaneously. Benchmarks indicate that GPU-accelerated implementations can achieve throughput improvements of 10-50x compared to CPU implementations when processing high-dimensional state vectors from sensor arrays.
Memory access optimization is equally crucial for hardware performance. Implementing efficient memory layouts that minimize cache misses can reduce processing latency by 15-30%. Techniques such as data alignment, loop unrolling, and strategic memory prefetching should be employed to ensure optimal data flow through the processing pipeline. For embedded systems with limited memory, fixed-point arithmetic implementations can reduce memory requirements by 50-75% compared to floating-point versions, with minimal impact on accuracy when properly calibrated.
Hardware-software co-design approaches yield particularly effective results. Partitioning the Kalman filter algorithm to execute prediction steps on dedicated hardware while handling less computationally intensive tasks in software can optimize both performance and flexibility. This hybrid approach allows systems to adapt to changing sensor configurations while maintaining processing efficiency. Additionally, implementing filter parameter tuning mechanisms in hardware can enable dynamic optimization based on operating conditions, significantly improving filter performance across varying environments.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!