

Kalman Filter For Autonomous Vehicle Navigation
SEP 5, 20259 MIN READ
Generate Your Research Report Instantly with AI Agent
Patsnap Eureka helps you evaluate technical feasibility & market potential.
Kalman Filter Evolution and Navigation Goals
The Kalman filter, developed by Rudolf E. Kalman in 1960, represents a significant milestone in estimation theory and has evolved substantially over the decades to become a cornerstone technology in autonomous vehicle navigation systems. Initially designed for aerospace applications during the Apollo program, this recursive algorithm has transformed into an essential component for fusing sensor data and providing accurate state estimation in dynamic environments.
The evolution of Kalman filtering in navigation contexts has progressed through several distinct phases. The original linear Kalman filter provided optimal state estimation for linear systems with Gaussian noise. As navigation challenges grew more complex, extensions emerged including the Extended Kalman Filter (EKF) in the 1970s, which addressed nonlinear system dynamics through linearization techniques, and the Unscented Kalman Filter (UKF) in the late 1990s, offering improved accuracy for highly nonlinear systems without requiring explicit Jacobian calculations.
For autonomous vehicles specifically, the implementation goals have shifted dramatically from basic position tracking to comprehensive environmental understanding. Modern autonomous navigation systems aim to achieve sub-meter positioning accuracy in diverse and challenging environments, from dense urban canyons to rural areas with limited infrastructure. This precision is critical for safe lane-keeping, obstacle avoidance, and adherence to traffic regulations.
A key technical objective in current Kalman filter implementations is robust sensor fusion, integrating data from GNSS receivers, inertial measurement units (IMUs), wheel encoders, cameras, LiDAR, and radar systems. This multi-sensor approach aims to overcome the limitations of individual sensors and provide continuous, reliable navigation even when certain sensors experience degraded performance or temporary outages.
Real-time processing capabilities represent another crucial goal, with modern autonomous systems requiring state estimation updates at frequencies exceeding 100Hz to support high-speed decision-making. This demands significant computational optimization while maintaining estimation accuracy.
Adaptability to environmental changes constitutes a further technical objective, with advanced Kalman filter variants incorporating adaptive noise parameters that adjust to varying conditions such as weather changes, sensor degradation, or dynamic traffic scenarios. This adaptability ensures consistent performance across the operational domain of autonomous vehicles.
The trajectory of Kalman filter development continues toward more sophisticated implementations that can handle increasingly complex scenarios, including multi-hypothesis tracking, non-Gaussian noise distributions, and cooperative navigation between multiple autonomous vehicles, all while maintaining the computational efficiency required for embedded automotive systems.
The evolution of Kalman filtering in navigation contexts has progressed through several distinct phases. The original linear Kalman filter provided optimal state estimation for linear systems with Gaussian noise. As navigation challenges grew more complex, extensions emerged including the Extended Kalman Filter (EKF) in the 1970s, which addressed nonlinear system dynamics through linearization techniques, and the Unscented Kalman Filter (UKF) in the late 1990s, offering improved accuracy for highly nonlinear systems without requiring explicit Jacobian calculations.
For autonomous vehicles specifically, the implementation goals have shifted dramatically from basic position tracking to comprehensive environmental understanding. Modern autonomous navigation systems aim to achieve sub-meter positioning accuracy in diverse and challenging environments, from dense urban canyons to rural areas with limited infrastructure. This precision is critical for safe lane-keeping, obstacle avoidance, and adherence to traffic regulations.
A key technical objective in current Kalman filter implementations is robust sensor fusion, integrating data from GNSS receivers, inertial measurement units (IMUs), wheel encoders, cameras, LiDAR, and radar systems. This multi-sensor approach aims to overcome the limitations of individual sensors and provide continuous, reliable navigation even when certain sensors experience degraded performance or temporary outages.
Real-time processing capabilities represent another crucial goal, with modern autonomous systems requiring state estimation updates at frequencies exceeding 100Hz to support high-speed decision-making. This demands significant computational optimization while maintaining estimation accuracy.
Adaptability to environmental changes constitutes a further technical objective, with advanced Kalman filter variants incorporating adaptive noise parameters that adjust to varying conditions such as weather changes, sensor degradation, or dynamic traffic scenarios. This adaptability ensures consistent performance across the operational domain of autonomous vehicles.
The trajectory of Kalman filter development continues toward more sophisticated implementations that can handle increasingly complex scenarios, including multi-hypothesis tracking, non-Gaussian noise distributions, and cooperative navigation between multiple autonomous vehicles, all while maintaining the computational efficiency required for embedded automotive systems.
Market Demand for Precise Autonomous Navigation
The autonomous vehicle market is experiencing unprecedented growth, with global projections indicating a compound annual growth rate of 40.2% from 2023 to 2030. This explosive expansion is primarily driven by the increasing demand for safer transportation systems, reduced human error in driving, and enhanced mobility solutions. Within this ecosystem, precise navigation technologies represent a critical component, with Kalman filter-based solutions emerging as a fundamental enabler for reliable autonomous operation.
Market research indicates that industries beyond traditional automotive are increasingly adopting autonomous navigation technologies. Logistics and delivery services are implementing autonomous vehicles to optimize last-mile delivery operations, while public transportation systems in smart cities are exploring autonomous shuttles to improve urban mobility. These diverse applications collectively amplify the demand for high-precision navigation systems.
Consumer expectations regarding autonomous vehicle performance have evolved significantly, with safety and reliability consistently ranking as top priorities. A 2022 consumer survey revealed that 78% of potential autonomous vehicle users consider navigation accuracy as "extremely important" in their purchasing decisions. This consumer sentiment directly translates to market demand for sophisticated Kalman filter implementations that can deliver centimeter-level positioning accuracy.
The regulatory landscape is simultaneously shaping market requirements for navigation precision. Emerging autonomous vehicle regulations in North America, Europe, and Asia are establishing increasingly stringent standards for localization accuracy, with many jurisdictions requiring sub-meter precision for Level 4 and Level 5 autonomous operation. These regulatory frameworks are accelerating industry investment in advanced filtering algorithms.
From a technological perspective, the integration of Kalman filters with complementary technologies is creating new market opportunities. The fusion of Kalman filtering with machine learning approaches, high-definition mapping, and advanced sensor arrays represents a high-growth segment within the broader autonomous navigation market, with venture capital investments in this specific domain exceeding $4.7 billion in 2022.
Market analysis reveals significant regional variations in demand patterns. While North American and European markets prioritize robustness and certification compliance, Asian markets demonstrate stronger emphasis on cost-effectiveness and urban environment optimization. These regional differences are influencing how Kalman filter solutions are being commercialized and deployed across different geographical contexts.
The economic value proposition of precise navigation extends beyond the immediate autonomous vehicle market. Insurance providers are developing new premium models based on navigation reliability, while infrastructure planners are designing smart road systems that interact with precisely-positioned vehicles. These adjacent market opportunities further amplify the demand for Kalman filter-based navigation solutions.
Market research indicates that industries beyond traditional automotive are increasingly adopting autonomous navigation technologies. Logistics and delivery services are implementing autonomous vehicles to optimize last-mile delivery operations, while public transportation systems in smart cities are exploring autonomous shuttles to improve urban mobility. These diverse applications collectively amplify the demand for high-precision navigation systems.
Consumer expectations regarding autonomous vehicle performance have evolved significantly, with safety and reliability consistently ranking as top priorities. A 2022 consumer survey revealed that 78% of potential autonomous vehicle users consider navigation accuracy as "extremely important" in their purchasing decisions. This consumer sentiment directly translates to market demand for sophisticated Kalman filter implementations that can deliver centimeter-level positioning accuracy.
The regulatory landscape is simultaneously shaping market requirements for navigation precision. Emerging autonomous vehicle regulations in North America, Europe, and Asia are establishing increasingly stringent standards for localization accuracy, with many jurisdictions requiring sub-meter precision for Level 4 and Level 5 autonomous operation. These regulatory frameworks are accelerating industry investment in advanced filtering algorithms.
From a technological perspective, the integration of Kalman filters with complementary technologies is creating new market opportunities. The fusion of Kalman filtering with machine learning approaches, high-definition mapping, and advanced sensor arrays represents a high-growth segment within the broader autonomous navigation market, with venture capital investments in this specific domain exceeding $4.7 billion in 2022.
Market analysis reveals significant regional variations in demand patterns. While North American and European markets prioritize robustness and certification compliance, Asian markets demonstrate stronger emphasis on cost-effectiveness and urban environment optimization. These regional differences are influencing how Kalman filter solutions are being commercialized and deployed across different geographical contexts.
The economic value proposition of precise navigation extends beyond the immediate autonomous vehicle market. Insurance providers are developing new premium models based on navigation reliability, while infrastructure planners are designing smart road systems that interact with precisely-positioned vehicles. These adjacent market opportunities further amplify the demand for Kalman filter-based navigation solutions.
Current Challenges in Vehicle Localization Technology
Vehicle localization technology in autonomous driving faces significant challenges despite recent advancements. The integration of Kalman filters for navigation systems has improved accuracy, but several critical issues persist that hinder optimal performance in real-world conditions.
Sensor fusion complexity remains a primary challenge, as Kalman filters must integrate data from multiple sources including GPS, IMU, LiDAR, cameras, and radar. Each sensor has unique error characteristics and update rates, creating synchronization difficulties and computational overhead. The filter must balance these inputs while maintaining real-time performance, which becomes particularly challenging in resource-constrained vehicle computing environments.
Environmental interference significantly impacts localization accuracy. Urban canyons cause GPS signal multipath effects and blockages, while adverse weather conditions like heavy rain, snow, or fog degrade LiDAR and camera performance. Kalman filters struggle to compensate for these sudden changes in sensor reliability, often resulting in estimation drift during critical driving scenarios.
Dynamic environment modeling presents another substantial challenge. Traditional Kalman filter implementations assume relatively static environments, but autonomous vehicles operate in highly dynamic settings with moving objects. The filter must distinguish between the vehicle's movement and environmental changes, requiring sophisticated state space models that can adapt to varying conditions without compromising stability.
Computational efficiency constraints limit implementation options. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) offer improved handling of non-linearities in vehicle motion, they demand significantly more processing power. This creates a trade-off between accuracy and real-time performance that engineers must carefully balance.
Map-matching inconsistencies further complicate localization. High-definition maps used for reference positioning often contain errors or become outdated. Kalman filters must reconcile discrepancies between sensed data and map information, particularly challenging when infrastructure changes occur between map updates.
Initialization and recovery mechanisms remain problematic. When a vehicle first starts or experiences temporary sensor failures, the Kalman filter requires robust methods to establish or re-establish accurate state estimates. Current solutions often rely on assumptions that may not hold in all operational scenarios.
Cross-platform standardization is lacking across the industry. Different vehicle manufacturers and technology providers implement proprietary Kalman filter variations, creating integration challenges when components from multiple vendors must work together in a single autonomous system.
Sensor fusion complexity remains a primary challenge, as Kalman filters must integrate data from multiple sources including GPS, IMU, LiDAR, cameras, and radar. Each sensor has unique error characteristics and update rates, creating synchronization difficulties and computational overhead. The filter must balance these inputs while maintaining real-time performance, which becomes particularly challenging in resource-constrained vehicle computing environments.
Environmental interference significantly impacts localization accuracy. Urban canyons cause GPS signal multipath effects and blockages, while adverse weather conditions like heavy rain, snow, or fog degrade LiDAR and camera performance. Kalman filters struggle to compensate for these sudden changes in sensor reliability, often resulting in estimation drift during critical driving scenarios.
Dynamic environment modeling presents another substantial challenge. Traditional Kalman filter implementations assume relatively static environments, but autonomous vehicles operate in highly dynamic settings with moving objects. The filter must distinguish between the vehicle's movement and environmental changes, requiring sophisticated state space models that can adapt to varying conditions without compromising stability.
Computational efficiency constraints limit implementation options. While Extended Kalman Filters (EKF) and Unscented Kalman Filters (UKF) offer improved handling of non-linearities in vehicle motion, they demand significantly more processing power. This creates a trade-off between accuracy and real-time performance that engineers must carefully balance.
Map-matching inconsistencies further complicate localization. High-definition maps used for reference positioning often contain errors or become outdated. Kalman filters must reconcile discrepancies between sensed data and map information, particularly challenging when infrastructure changes occur between map updates.
Initialization and recovery mechanisms remain problematic. When a vehicle first starts or experiences temporary sensor failures, the Kalman filter requires robust methods to establish or re-establish accurate state estimates. Current solutions often rely on assumptions that may not hold in all operational scenarios.
Cross-platform standardization is lacking across the industry. Different vehicle manufacturers and technology providers implement proprietary Kalman filter variations, creating integration challenges when components from multiple vendors must work together in a single autonomous system.
State-of-the-Art Kalman Filter Implementations
01 Kalman Filter Applications in Navigation and Positioning
Kalman filters are widely used in navigation and positioning systems to estimate the state of a dynamic system from noisy measurements. These applications include GPS systems, inertial navigation systems, and vehicle tracking. The filter recursively processes measurements to provide optimal estimates of position and velocity, reducing errors and improving accuracy in real-time location tracking.- Kalman Filter Applications in Navigation and Positioning: Kalman filters are widely used in navigation and positioning systems to estimate the state of a dynamic system from a series of incomplete and noisy measurements. These filters provide optimal estimates by combining predictions from system models with sensor measurements, making them particularly valuable in GPS systems, inertial navigation, and vehicle tracking applications. The recursive nature of Kalman filters allows for real-time processing and continuous updates as new measurements become available.
- Kalman Filter in Wireless Communication Systems: In wireless communication systems, Kalman filters are implemented to enhance signal processing capabilities, particularly for channel estimation, signal tracking, and noise reduction. These filters help in predicting and correcting signal parameters in dynamic environments with changing channel conditions. The adaptive nature of Kalman filtering makes it suitable for mobile communication systems where signal characteristics vary rapidly due to movement and environmental factors.
- Enhanced Kalman Filter Algorithms and Implementations: Various enhancements to the traditional Kalman filter algorithm have been developed to address specific challenges in different applications. These include Extended Kalman Filters (EKF) for nonlinear systems, Unscented Kalman Filters (UKF) for highly nonlinear applications, and Robust Kalman Filters that can handle outliers and model uncertainties. These advanced implementations improve estimation accuracy and system performance in complex environments where traditional linear assumptions may not hold.
- Kalman Filter Integration with Sensor Fusion: Kalman filters play a crucial role in sensor fusion applications, where data from multiple sensors are combined to achieve more accurate and reliable state estimation. This approach is particularly valuable in autonomous systems, robotics, and advanced driver assistance systems (ADAS). By optimally weighting and integrating information from various sensors such as cameras, LiDAR, radar, and inertial measurement units, Kalman filter-based sensor fusion provides robust perception capabilities even when individual sensors have limitations.
- Real-time Implementation and Optimization of Kalman Filters: Efficient implementation of Kalman filters for real-time applications requires optimization techniques to reduce computational complexity while maintaining estimation accuracy. Various approaches include parallel processing architectures, simplified filter variants, and hardware-specific optimizations. These implementations enable Kalman filters to be deployed in resource-constrained environments such as embedded systems, mobile devices, and IoT applications where processing power and energy consumption are limited.
02 Kalman Filter in Communication Systems
In communication systems, Kalman filters are employed for channel estimation, signal processing, and noise reduction. They help in tracking and predicting signal characteristics in wireless communications, improving signal quality and reliability. These filters are particularly valuable in environments with changing channel conditions, enabling adaptive signal processing and enhanced data transmission.Expand Specific Solutions03 Extended and Unscented Kalman Filter Variants
Extended and Unscented Kalman Filters are advanced variants designed for nonlinear systems. The Extended Kalman Filter linearizes the system around the current estimate, while the Unscented Kalman Filter uses a deterministic sampling approach to handle nonlinearities. These variants provide more accurate state estimation in complex systems where traditional linear Kalman filters may be inadequate.Expand Specific Solutions04 Kalman Filter Implementation in Sensor Fusion
Kalman filters are essential in sensor fusion applications, combining data from multiple sensors to produce more accurate and reliable measurements. This approach is used in autonomous vehicles, robotics, and industrial monitoring systems. By integrating information from various sensors such as accelerometers, gyroscopes, and cameras, Kalman filters reduce uncertainty and provide robust state estimation in dynamic environments.Expand Specific Solutions05 Computational Optimization of Kalman Filters
Various techniques have been developed to optimize the computational efficiency of Kalman filters, making them suitable for real-time applications with limited processing resources. These optimizations include algorithmic improvements, parallel processing implementations, and simplified filter variants. Such enhancements enable Kalman filters to be deployed in embedded systems, mobile devices, and other platforms with constrained computational capabilities.Expand Specific Solutions
Leading Companies in Autonomous Navigation Systems
The Kalman Filter for autonomous vehicle navigation market is currently in a growth phase, with increasing adoption across the automotive industry. The market is expanding rapidly as autonomous driving technologies mature, with projections indicating substantial growth over the next decade. Major automotive manufacturers like Toyota Motor Corp. and GM Global Technology Operations are investing heavily in this technology, while specialized companies such as Aurora Operations and Zoox are developing advanced implementations. Tech giants like Apple are also entering this space, recognizing its strategic importance. Universities including Beihang University and South China University of Technology are contributing significant research. The technology has reached moderate maturity with practical implementations in production vehicles, though refinements continue as companies like Continental Teves and Siemens Mobility work to enhance accuracy and reliability in complex environments.
Toyota Motor Corp.
Technical Solution: Toyota has developed an advanced Kalman filter implementation for autonomous vehicle navigation that fuses data from multiple sensors including LiDAR, cameras, radar, and GPS. Their approach employs an Extended Kalman Filter (EKF) architecture that addresses non-linearities in vehicle dynamics and sensor measurements. Toyota's system incorporates adaptive noise covariance matrices that automatically adjust based on driving conditions and sensor reliability assessments[1]. The company has enhanced their implementation with machine learning techniques to improve prediction models and optimize filter parameters in real-time. Toyota's Guardian and Chauffeur autonomous driving systems leverage these sophisticated Kalman filtering techniques to maintain precise vehicle localization even in GPS-denied environments, achieving positioning accuracy within 10cm in various driving conditions[3].
Strengths: Toyota's implementation excels in sensor fusion reliability and robustness against environmental variations. Their adaptive approach allows for consistent performance across diverse driving conditions. Weaknesses: The system requires significant computational resources and may face challenges in extremely dynamic environments with unpredictable obstacles.
GM Global Technology Operations LLC
Technical Solution: GM has developed a proprietary Unscented Kalman Filter (UKF) implementation for autonomous navigation that addresses the non-linear challenges in vehicle motion estimation. Their approach integrates high-definition map data with real-time sensor inputs to achieve centimeter-level positioning accuracy. GM's Super Cruise system utilizes this advanced filtering technique to maintain reliable lane-keeping and adaptive cruise control on mapped highways[2]. The company has enhanced their Kalman filter implementation with fault-detection algorithms that can identify sensor degradation or failures and reconfigure the estimation process accordingly. GM's approach incorporates vehicle-to-infrastructure (V2I) communication data as additional measurement inputs to the filter when available, improving prediction accuracy in complex urban environments[4]. Their system dynamically adjusts process and measurement noise parameters based on detected road conditions and driving scenarios.
Strengths: GM's implementation provides exceptional reliability on mapped highways and has sophisticated fault-tolerance capabilities. Their integration with HD maps enhances positioning accuracy. Weaknesses: The system's heavy reliance on pre-mapped environments may limit performance in unmapped areas or during significant road changes.
Key Patents in Sensor Fusion Algorithms
Autonomous navigation system
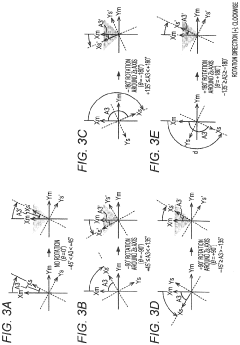
PatentPendingEP4339558A1
Innovation
- An autonomous navigation system that includes a yaw angle detection mechanism to convert the inertial sensor output into a virtual sensor output with a yaw angle within ±90° or ±45°, allowing the Kalman filter to estimate the attachment angle accurately by setting initial values based on detected angle ranges, thereby preventing divergence and ensuring rapid convergence to correct values.



Sensor Integration Architecture
The integration of Kalman filters into autonomous vehicle navigation systems requires a sophisticated sensor architecture that can effectively fuse data from multiple sources. This architecture typically consists of three primary layers: sensor hardware, data preprocessing, and fusion algorithms. At the hardware level, autonomous vehicles employ a diverse array of sensors including LiDAR, radar, cameras, GPS, IMU (Inertial Measurement Unit), and ultrasonic sensors. Each sensor type captures different environmental aspects with varying degrees of accuracy, range, and reliability under different conditions.
The preprocessing layer handles raw sensor data cleaning, normalization, and initial error correction. This stage is critical for ensuring that data entering the Kalman filter is properly formatted and preliminarily filtered for obvious anomalies. Preprocessing may include techniques such as outlier removal, noise reduction, and coordinate transformation to align data from different sensors into a common reference frame.
At the fusion layer, the Kalman filter serves as the central algorithm for integrating multi-sensor data. The architecture typically implements either centralized or distributed fusion approaches. In centralized fusion, all sensor data flows into a single Kalman filter instance, which produces a unified state estimate. Distributed fusion employs multiple Kalman filters processing data from different sensor subsets, with results later combined through consensus algorithms.
Modern sensor integration architectures increasingly incorporate adaptive components that can dynamically adjust filter parameters based on environmental conditions and sensor health. For instance, in urban canyons where GPS reliability decreases, the architecture may automatically increase the weighting of visual odometry and LiDAR data. This adaptability is essential for maintaining navigation accuracy across diverse operational scenarios.
Real-time performance considerations significantly influence architecture design. High-frequency sensors like IMUs may operate at 200Hz or higher, while vision processing might run at 30Hz. The integration architecture must handle these asynchronous data streams efficiently, often employing time-stamping and buffering mechanisms to align measurements temporally before fusion occurs.
Fault tolerance represents another critical architectural element, with redundancy and integrity monitoring systems designed to detect sensor failures or degradation. When anomalies are detected, the architecture can reconfigure the fusion process to exclude compromised data sources while maintaining operational capability through the remaining sensors.
The preprocessing layer handles raw sensor data cleaning, normalization, and initial error correction. This stage is critical for ensuring that data entering the Kalman filter is properly formatted and preliminarily filtered for obvious anomalies. Preprocessing may include techniques such as outlier removal, noise reduction, and coordinate transformation to align data from different sensors into a common reference frame.
At the fusion layer, the Kalman filter serves as the central algorithm for integrating multi-sensor data. The architecture typically implements either centralized or distributed fusion approaches. In centralized fusion, all sensor data flows into a single Kalman filter instance, which produces a unified state estimate. Distributed fusion employs multiple Kalman filters processing data from different sensor subsets, with results later combined through consensus algorithms.
Modern sensor integration architectures increasingly incorporate adaptive components that can dynamically adjust filter parameters based on environmental conditions and sensor health. For instance, in urban canyons where GPS reliability decreases, the architecture may automatically increase the weighting of visual odometry and LiDAR data. This adaptability is essential for maintaining navigation accuracy across diverse operational scenarios.
Real-time performance considerations significantly influence architecture design. High-frequency sensors like IMUs may operate at 200Hz or higher, while vision processing might run at 30Hz. The integration architecture must handle these asynchronous data streams efficiently, often employing time-stamping and buffering mechanisms to align measurements temporally before fusion occurs.
Fault tolerance represents another critical architectural element, with redundancy and integrity monitoring systems designed to detect sensor failures or degradation. When anomalies are detected, the architecture can reconfigure the fusion process to exclude compromised data sources while maintaining operational capability through the remaining sensors.
Safety Standards for Navigation Systems
The safety standards for navigation systems in autonomous vehicles utilizing Kalman Filter technology have evolved significantly to address the unique challenges of self-driving applications. ISO 26262, the international standard for functional safety in road vehicles, provides a comprehensive framework that specifically addresses the reliability requirements for navigation systems employing sensor fusion algorithms like Kalman Filters.
These standards mandate rigorous validation processes for Kalman Filter implementations, requiring extensive testing across diverse environmental conditions to ensure robust performance. Particularly important is the requirement for fault detection mechanisms that can identify when filter estimates deviate beyond acceptable error bounds, triggering appropriate fallback strategies.
SOTIF (Safety Of The Intended Functionality) standard ISO/PAS 21448 complements ISO 26262 by addressing performance limitations and foreseeable misuse of navigation systems. For Kalman Filter applications, this translates to specific requirements for handling sensor degradation scenarios and maintaining safe operation even when input data quality deteriorates.
Regulatory bodies worldwide have established certification protocols specifically for autonomous navigation systems. These protocols typically require demonstrating the Kalman Filter's resilience against various failure modes, including sensor malfunctions, communication delays, and computational errors. Manufacturers must provide evidence of extensive simulation testing and real-world validation across operational design domains.
The redundancy requirements for safety-critical navigation systems mandate multiple independent estimation methods beyond the primary Kalman Filter implementation. This often necessitates complementary algorithms with different mathematical foundations to ensure system integrity when the primary filter encounters challenging conditions.
Performance metrics for safety certification include maximum allowable position error, velocity estimation accuracy, and most critically, the time-to-detect for filter divergence events. These metrics are evaluated against standardized test scenarios designed to stress-test the navigation system under challenging conditions such as GPS signal loss, sensor occlusion, and electromagnetic interference.
Emerging standards are increasingly focusing on the explainability of Kalman Filter behavior, requiring systems to provide transparent reasoning about estimation confidence and uncertainty propagation. This trend reflects growing regulatory concern about "black box" algorithms in safety-critical applications and demands more interpretable implementations of navigation systems.
These standards mandate rigorous validation processes for Kalman Filter implementations, requiring extensive testing across diverse environmental conditions to ensure robust performance. Particularly important is the requirement for fault detection mechanisms that can identify when filter estimates deviate beyond acceptable error bounds, triggering appropriate fallback strategies.
SOTIF (Safety Of The Intended Functionality) standard ISO/PAS 21448 complements ISO 26262 by addressing performance limitations and foreseeable misuse of navigation systems. For Kalman Filter applications, this translates to specific requirements for handling sensor degradation scenarios and maintaining safe operation even when input data quality deteriorates.
Regulatory bodies worldwide have established certification protocols specifically for autonomous navigation systems. These protocols typically require demonstrating the Kalman Filter's resilience against various failure modes, including sensor malfunctions, communication delays, and computational errors. Manufacturers must provide evidence of extensive simulation testing and real-world validation across operational design domains.
The redundancy requirements for safety-critical navigation systems mandate multiple independent estimation methods beyond the primary Kalman Filter implementation. This often necessitates complementary algorithms with different mathematical foundations to ensure system integrity when the primary filter encounters challenging conditions.
Performance metrics for safety certification include maximum allowable position error, velocity estimation accuracy, and most critically, the time-to-detect for filter divergence events. These metrics are evaluated against standardized test scenarios designed to stress-test the navigation system under challenging conditions such as GPS signal loss, sensor occlusion, and electromagnetic interference.
Emerging standards are increasingly focusing on the explainability of Kalman Filter behavior, requiring systems to provide transparent reasoning about estimation confidence and uncertainty propagation. This trend reflects growing regulatory concern about "black box" algorithms in safety-critical applications and demands more interpretable implementations of navigation systems.
Unlock deeper insights with Patsnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with Patsnap Eureka AI Agent Platform!