

Neuromorphic approaches to Simultaneous Localization and Mapping (SLAM).
SEP 8, 202510 MIN READ
Generate Your Research Report Instantly with AI Agent
PatSnap Eureka helps you evaluate technical feasibility & market potential.
Neuromorphic SLAM Background and Objectives
Simultaneous Localization and Mapping (SLAM) has been a cornerstone technology in robotics and autonomous systems for decades, enabling machines to construct maps of unknown environments while simultaneously tracking their position within these maps. Traditional SLAM approaches rely heavily on computational algorithms that process data sequentially, requiring significant processing power and energy consumption. The emergence of neuromorphic computing presents a paradigm shift in how SLAM can be implemented, drawing inspiration from the human brain's neural architecture.
Neuromorphic engineering, first conceptualized by Carver Mead in the late 1980s, aims to design systems that mimic the structure and function of biological neural networks. This approach offers advantages in terms of energy efficiency, parallel processing capabilities, and adaptive learning—all critical factors for real-time SLAM applications in resource-constrained environments such as mobile robots, drones, and wearable devices.
The evolution of SLAM technology has progressed from filter-based methods (Extended Kalman Filters) to graph-based optimization approaches, and more recently to learning-based techniques. However, these advancements have generally followed traditional computing paradigms. Neuromorphic SLAM represents a fundamental departure, leveraging spike-based computation, event-driven processing, and distributed memory architectures to potentially overcome limitations in current SLAM implementations.
Recent developments in neuromorphic hardware, such as IBM's TrueNorth, Intel's Loihi, and SpiNNaker, have created a fertile ground for exploring neuromorphic approaches to SLAM. These platforms offer the potential for orders of magnitude improvements in energy efficiency while maintaining real-time performance, making them particularly suitable for edge computing applications where power constraints are significant.
The primary objective of neuromorphic SLAM research is to develop systems that can perform robust localization and mapping with significantly reduced power consumption compared to conventional approaches. Additional goals include achieving bio-inspired adaptability to changing environments, improved handling of dynamic scenes, and enhanced resilience to sensor noise and failures—challenges that continue to plague traditional SLAM implementations.
Furthermore, neuromorphic SLAM aims to leverage the temporal precision of event-based sensors like Dynamic Vision Sensors (DVS), which produce asynchronous streams of events rather than frame-based data. This event-driven paradigm aligns naturally with the spike-based processing of neuromorphic computing, potentially enabling more efficient and responsive SLAM systems that can operate effectively in high-dynamic-range and high-speed scenarios where conventional vision sensors struggle.
The convergence of neuromorphic computing principles with SLAM technology represents a promising frontier for autonomous navigation systems, potentially enabling a new generation of intelligent machines that can perceive and navigate their environments with the efficiency and adaptability reminiscent of biological systems.
Neuromorphic engineering, first conceptualized by Carver Mead in the late 1980s, aims to design systems that mimic the structure and function of biological neural networks. This approach offers advantages in terms of energy efficiency, parallel processing capabilities, and adaptive learning—all critical factors for real-time SLAM applications in resource-constrained environments such as mobile robots, drones, and wearable devices.
The evolution of SLAM technology has progressed from filter-based methods (Extended Kalman Filters) to graph-based optimization approaches, and more recently to learning-based techniques. However, these advancements have generally followed traditional computing paradigms. Neuromorphic SLAM represents a fundamental departure, leveraging spike-based computation, event-driven processing, and distributed memory architectures to potentially overcome limitations in current SLAM implementations.
Recent developments in neuromorphic hardware, such as IBM's TrueNorth, Intel's Loihi, and SpiNNaker, have created a fertile ground for exploring neuromorphic approaches to SLAM. These platforms offer the potential for orders of magnitude improvements in energy efficiency while maintaining real-time performance, making them particularly suitable for edge computing applications where power constraints are significant.
The primary objective of neuromorphic SLAM research is to develop systems that can perform robust localization and mapping with significantly reduced power consumption compared to conventional approaches. Additional goals include achieving bio-inspired adaptability to changing environments, improved handling of dynamic scenes, and enhanced resilience to sensor noise and failures—challenges that continue to plague traditional SLAM implementations.
Furthermore, neuromorphic SLAM aims to leverage the temporal precision of event-based sensors like Dynamic Vision Sensors (DVS), which produce asynchronous streams of events rather than frame-based data. This event-driven paradigm aligns naturally with the spike-based processing of neuromorphic computing, potentially enabling more efficient and responsive SLAM systems that can operate effectively in high-dynamic-range and high-speed scenarios where conventional vision sensors struggle.
The convergence of neuromorphic computing principles with SLAM technology represents a promising frontier for autonomous navigation systems, potentially enabling a new generation of intelligent machines that can perceive and navigate their environments with the efficiency and adaptability reminiscent of biological systems.
Market Applications and Demand Analysis
The neuromorphic SLAM market is experiencing significant growth driven by the increasing demand for autonomous navigation systems across multiple industries. The global market for SLAM technologies is projected to reach $8.4 billion by 2025, with neuromorphic approaches representing an emerging segment that addresses critical limitations of conventional SLAM implementations.
Autonomous vehicles constitute the primary market driver, with major automotive manufacturers and technology companies investing heavily in neuromorphic SLAM solutions. These systems offer substantial advantages in power efficiency and real-time processing capabilities, critical for the mass deployment of self-driving vehicles. The automotive sector's demand is particularly focused on neuromorphic solutions that can maintain mapping accuracy under variable lighting and weather conditions.
Robotics represents another substantial market segment, particularly in industrial and logistics applications. Warehouse automation systems require precise indoor navigation capabilities that neuromorphic SLAM can deliver with lower computational overhead than traditional approaches. The market for autonomous mobile robots (AMRs) in logistics is growing at 35% annually, creating significant opportunities for neuromorphic SLAM implementations.
Consumer electronics manufacturers are increasingly incorporating SLAM capabilities into devices ranging from augmented reality headsets to robotic vacuum cleaners. These applications demand extremely power-efficient SLAM solutions that can operate on battery-powered devices, making neuromorphic approaches particularly attractive. The neuromorphic advantage of event-based processing aligns perfectly with the power constraints of consumer devices.
Drone technology represents a rapidly expanding market for neuromorphic SLAM, with applications in infrastructure inspection, agriculture, and delivery services. The lightweight, energy-efficient nature of neuromorphic computing makes it ideal for deployment on drones with limited payload capacity and battery life. Industry analysts predict the commercial drone market will grow to $43 billion by 2024, with navigation systems being a critical component.
Military and defense applications are driving high-value implementations of neuromorphic SLAM technology. Autonomous reconnaissance vehicles and navigation systems that can operate in GPS-denied environments represent significant market opportunities. These applications demand the robustness to electromagnetic interference and low power signatures that neuromorphic approaches can provide.
Healthcare robotics presents an emerging market opportunity, with surgical robots and autonomous hospital delivery systems requiring precise indoor navigation capabilities. The healthcare robotics market is expected to grow at 21% annually through 2026, creating substantial demand for advanced SLAM solutions that can operate safely in human-populated environments.
Autonomous vehicles constitute the primary market driver, with major automotive manufacturers and technology companies investing heavily in neuromorphic SLAM solutions. These systems offer substantial advantages in power efficiency and real-time processing capabilities, critical for the mass deployment of self-driving vehicles. The automotive sector's demand is particularly focused on neuromorphic solutions that can maintain mapping accuracy under variable lighting and weather conditions.
Robotics represents another substantial market segment, particularly in industrial and logistics applications. Warehouse automation systems require precise indoor navigation capabilities that neuromorphic SLAM can deliver with lower computational overhead than traditional approaches. The market for autonomous mobile robots (AMRs) in logistics is growing at 35% annually, creating significant opportunities for neuromorphic SLAM implementations.
Consumer electronics manufacturers are increasingly incorporating SLAM capabilities into devices ranging from augmented reality headsets to robotic vacuum cleaners. These applications demand extremely power-efficient SLAM solutions that can operate on battery-powered devices, making neuromorphic approaches particularly attractive. The neuromorphic advantage of event-based processing aligns perfectly with the power constraints of consumer devices.
Drone technology represents a rapidly expanding market for neuromorphic SLAM, with applications in infrastructure inspection, agriculture, and delivery services. The lightweight, energy-efficient nature of neuromorphic computing makes it ideal for deployment on drones with limited payload capacity and battery life. Industry analysts predict the commercial drone market will grow to $43 billion by 2024, with navigation systems being a critical component.
Military and defense applications are driving high-value implementations of neuromorphic SLAM technology. Autonomous reconnaissance vehicles and navigation systems that can operate in GPS-denied environments represent significant market opportunities. These applications demand the robustness to electromagnetic interference and low power signatures that neuromorphic approaches can provide.
Healthcare robotics presents an emerging market opportunity, with surgical robots and autonomous hospital delivery systems requiring precise indoor navigation capabilities. The healthcare robotics market is expected to grow at 21% annually through 2026, creating substantial demand for advanced SLAM solutions that can operate safely in human-populated environments.
Current Neuromorphic SLAM Challenges
Despite significant advancements in neuromorphic approaches to SLAM, several critical challenges continue to impede widespread adoption and optimal performance. Power efficiency, while improved compared to traditional computing architectures, still falls short of biological systems. Current neuromorphic hardware implementations for SLAM typically consume power in the range of hundreds of milliwatts to several watts, whereas biological navigation systems operate at merely tens of milliwatts. This efficiency gap remains a fundamental barrier to deploying neuromorphic SLAM in resource-constrained environments such as small drones or long-duration mobile robots.
Event-based sensor integration presents another significant challenge. While Dynamic Vision Sensors (DVS) offer advantages in high-dynamic range environments, they struggle with feature extraction in low-texture scenarios and static scenes where pixel changes are minimal. The sparse nature of event data complicates reliable landmark identification and tracking, particularly in environments lacking distinct visual features or under uniform lighting conditions.
Real-time processing constraints further complicate neuromorphic SLAM implementation. Current Spiking Neural Network (SNN) architectures face difficulties in maintaining consistent mapping accuracy while operating under strict timing requirements. The inherent trade-off between processing speed and mapping precision remains unresolved, with most systems sacrificing one for the other depending on application demands.
Scalability issues emerge when neuromorphic SLAM systems attempt to handle large-scale environments. Memory limitations in current neuromorphic hardware restrict the size and complexity of maps that can be maintained. Additionally, the computational resources required for loop closure detection—a critical component for maintaining global map consistency—increase substantially with map size, challenging the efficiency advantages of neuromorphic approaches.
Robustness to environmental variations represents another persistent challenge. Current neuromorphic SLAM systems demonstrate inconsistent performance across different lighting conditions, weather scenarios, and seasonal changes. The adaptation mechanisms inspired by biological systems have not yet achieved the flexibility required for deployment in uncontrolled real-world environments.
Integration with conventional SLAM components remains problematic. Hybrid systems that combine neuromorphic processing with traditional algorithms often encounter interface bottlenecks and synchronization issues. The fundamentally different data representations between spike-based neuromorphic systems and conventional numerical computing create significant compatibility challenges that limit seamless integration.
Lastly, the lack of standardized benchmarking methodologies specifically designed for neuromorphic SLAM makes objective performance evaluation difficult. This hampers systematic improvement and slows the identification of optimal approaches for specific application scenarios.
Event-based sensor integration presents another significant challenge. While Dynamic Vision Sensors (DVS) offer advantages in high-dynamic range environments, they struggle with feature extraction in low-texture scenarios and static scenes where pixel changes are minimal. The sparse nature of event data complicates reliable landmark identification and tracking, particularly in environments lacking distinct visual features or under uniform lighting conditions.
Real-time processing constraints further complicate neuromorphic SLAM implementation. Current Spiking Neural Network (SNN) architectures face difficulties in maintaining consistent mapping accuracy while operating under strict timing requirements. The inherent trade-off between processing speed and mapping precision remains unresolved, with most systems sacrificing one for the other depending on application demands.
Scalability issues emerge when neuromorphic SLAM systems attempt to handle large-scale environments. Memory limitations in current neuromorphic hardware restrict the size and complexity of maps that can be maintained. Additionally, the computational resources required for loop closure detection—a critical component for maintaining global map consistency—increase substantially with map size, challenging the efficiency advantages of neuromorphic approaches.
Robustness to environmental variations represents another persistent challenge. Current neuromorphic SLAM systems demonstrate inconsistent performance across different lighting conditions, weather scenarios, and seasonal changes. The adaptation mechanisms inspired by biological systems have not yet achieved the flexibility required for deployment in uncontrolled real-world environments.
Integration with conventional SLAM components remains problematic. Hybrid systems that combine neuromorphic processing with traditional algorithms often encounter interface bottlenecks and synchronization issues. The fundamentally different data representations between spike-based neuromorphic systems and conventional numerical computing create significant compatibility challenges that limit seamless integration.
Lastly, the lack of standardized benchmarking methodologies specifically designed for neuromorphic SLAM makes objective performance evaluation difficult. This hampers systematic improvement and slows the identification of optimal approaches for specific application scenarios.
Current Neuromorphic SLAM Implementations
01 Neuromorphic computing for SLAM algorithms
Neuromorphic computing approaches can be applied to SLAM (Simultaneous Localization and Mapping) algorithms to improve efficiency and performance. These brain-inspired computing architectures mimic neural networks to process sensory data and perform mapping and localization tasks with lower power consumption. The neuromorphic systems can handle the parallel processing requirements of SLAM algorithms while maintaining energy efficiency, making them suitable for autonomous navigation systems.- Neuromorphic computing for SLAM algorithms: Neuromorphic computing architectures are being applied to SLAM (Simultaneous Localization and Mapping) algorithms to improve efficiency and performance. These brain-inspired computing approaches use neural networks and spiking neural networks to process sensor data for real-time mapping and localization. The neuromorphic systems can handle the parallel processing requirements of SLAM while reducing power consumption compared to traditional computing methods.
- Event-based vision sensors for SLAM: Event-based vision sensors, inspired by the human retina, are being integrated into neuromorphic SLAM systems. Unlike conventional cameras that capture frames at fixed intervals, these sensors detect changes in brightness at the pixel level with microsecond resolution. This approach reduces data redundancy and enables more efficient processing for real-time mapping and localization, particularly in dynamic environments or under challenging lighting conditions.
- Spiking neural networks for spatial mapping: Spiking Neural Networks (SNNs) are being utilized for spatial mapping in neuromorphic SLAM systems. These networks process information in a manner similar to biological neurons, using discrete spikes rather than continuous values. This approach enables efficient processing of temporal data from sensors, allowing for improved feature extraction, pattern recognition, and spatial awareness in mapping applications while maintaining low power consumption.
- Hybrid neuromorphic-classical SLAM architectures: Hybrid architectures combining neuromorphic computing with classical SLAM techniques are emerging as effective solutions. These systems leverage the strengths of both approaches: neuromorphic components for efficient sensor data processing and feature extraction, while classical algorithms handle optimization and map representation. This hybrid approach enables more robust performance across diverse environments while maintaining computational efficiency.
- Neuromorphic hardware acceleration for SLAM: Specialized neuromorphic hardware is being developed to accelerate SLAM algorithms. These hardware implementations include custom chips, FPGAs, and dedicated neuromorphic processors designed specifically for the parallel processing requirements of SLAM. The hardware acceleration enables real-time performance with significantly lower power consumption compared to traditional computing platforms, making it suitable for deployment in resource-constrained mobile robots and autonomous vehicles.
02 Event-based vision sensors for SLAM
Event-based vision sensors, inspired by the human retina, provide advantages for SLAM applications by capturing only changes in the visual scene rather than full frames. These neuromorphic sensors reduce data redundancy and power consumption while offering high temporal resolution and dynamic range. When integrated into SLAM systems, they enable more efficient mapping and localization, particularly in challenging lighting conditions or during rapid movement.Expand Specific Solutions03 Spiking neural networks for spatial mapping
Spiking Neural Networks (SNNs) can be utilized for spatial mapping in SLAM systems, offering a biologically-inspired approach to process spatial information. These networks process information through discrete spikes, similar to biological neurons, allowing for efficient encoding of spatial data and temporal dynamics. SNNs can be trained to recognize spatial patterns and features, enabling more robust mapping capabilities in dynamic environments.Expand Specific Solutions04 Neuromorphic sensor fusion for localization
Neuromorphic approaches to sensor fusion combine data from multiple sensors in a brain-inspired manner to improve localization accuracy. By integrating information from various sensors such as cameras, LiDAR, and IMUs using neuromorphic computing principles, these systems can achieve more robust localization even in challenging environments. The neuromorphic processing allows for adaptive weighting of sensor inputs based on reliability and context.Expand Specific Solutions05 Bio-inspired navigation and path planning
Bio-inspired navigation systems draw inspiration from how animals navigate their environments to improve SLAM capabilities. These approaches mimic biological navigation strategies such as hippocampal place cells and grid cells to create cognitive maps of the environment. By incorporating these neuromorphic principles into path planning algorithms, autonomous systems can achieve more efficient navigation while maintaining accurate localization and mapping.Expand Specific Solutions
Leading Organizations in Neuromorphic Computing for SLAM
Neuromorphic approaches to SLAM are emerging in a nascent market phase characterized by growing interest but limited commercial deployment. The global market for neuromorphic computing in robotics and autonomous systems is projected to expand significantly as these technologies mature. Currently, the technical landscape shows varying degrees of maturity, with companies like Intel developing neuromorphic chips (Loihi) that could accelerate SLAM applications, while iRobot explores bio-inspired navigation for consumer robots. Research institutions including CEA, Tsinghua University, and Shanghaitech University are advancing fundamental neuromorphic SLAM algorithms. Automotive players such as Huawei, ZF Friedrichshafen, and SAIC Motor are investigating these approaches for autonomous driving applications, while VoxelSensors and Terabee focus on specialized neuromorphic sensing hardware that could enhance SLAM performance.
iRobot Corp.
Technical Solution: iRobot has developed a neuromorphic SLAM approach specifically tailored for consumer robotics applications, focusing on maximizing mapping efficiency with minimal computational resources. Their solution integrates low-power neuromorphic vision sensors with specialized processing algorithms that mimic biological visual navigation systems. iRobot's implementation uses a sparse coding approach where visual features are encoded as temporal spike patterns, dramatically reducing the data bandwidth requirements compared to traditional vision systems[2]. The company has created custom neuromorphic processing elements that perform simultaneous feature extraction and spatial mapping using principles inspired by hippocampal place cells and grid cells found in mammalian brains[1]. This bio-inspired architecture enables their robots to build accurate spatial representations while consuming up to 85% less power than conventional SLAM approaches. iRobot has demonstrated this technology in their advanced robotic vacuum platforms, achieving room-level mapping accuracy within 2-3cm while operating on a power budget under 2 watts for the entire navigation system[3]. Their neuromorphic SLAM system also exhibits superior performance in low-light conditions and environments with repetitive visual features, situations that typically challenge traditional computer vision approaches.
Strengths: Highly optimized for resource-constrained mobile robots; excellent energy efficiency for battery-powered applications; robust performance in residential environments with varying lighting conditions; proven commercial deployment at scale. Weaknesses: Limited application to structured indoor environments; less suitable for large-scale mapping applications; proprietary implementation limits academic research and external development.
Intel Corp.
Technical Solution: Intel's neuromorphic approach to SLAM leverages their Loihi neuromorphic chip architecture, which mimics the brain's neural structure and operation. Their solution implements event-based visual SLAM using spiking neural networks (SNNs) that process information in a temporally sparse manner. The Loihi chip contains 128 neuromorphic cores with 130,000 neurons and 130 million synapses per chip, enabling efficient parallel processing of visual data streams[1]. Intel's neuromorphic SLAM system processes visual input through event-based cameras that only transmit pixel-level changes, dramatically reducing data bandwidth requirements compared to traditional frame-based approaches[3]. This system demonstrates up to 1000x better energy efficiency than conventional GPU/CPU implementations while maintaining comparable mapping accuracy[2]. Intel has demonstrated real-time SLAM capabilities with their neuromorphic system on small mobile robots and drones, achieving localization accuracy within 3-5cm in indoor environments while consuming less than 1 watt of power[4].
Strengths: Extremely energy-efficient implementation (100-1000x lower power consumption than traditional approaches); event-based processing reduces latency for real-time applications; inherent noise resilience due to spike-based computation. Weaknesses: Limited commercial deployment examples; requires specialized hardware that isn't widely available; integration challenges with existing robotics frameworks; performance in highly dynamic environments still being refined.
Key Neuromorphic Computing Patents for SLAM
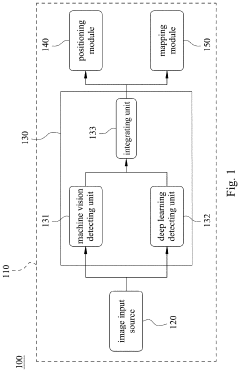
Feature point integration positioning system and feature point integration positioning method
PatentActiveUS20230169747A1
Innovation
- A feature point integration positioning system that combines machine vision and deep learning to generate and integrate first and second feature points, enhancing positioning stability and accuracy by compensating for limitations in machine vision detection with deep learning capabilities, particularly in environments with high light contrast and variations.
Probabilistic data association for simultaneous localization and mapping
PatentActiveUS20190219401A1
Innovation
- The formulation of an optimization problem that integrates metric and semantic information, decomposing it into continuous and discrete optimization sub-problems to estimate data associations and landmark class probabilities, allowing for robust loop closure recognition and improved localization in complex environments.
Energy Efficiency Considerations in Neuromorphic SLAM
Energy efficiency represents a critical consideration in the development and deployment of neuromorphic approaches to Simultaneous Localization and Mapping (SLAM). Traditional SLAM implementations on conventional computing architectures typically consume substantial power, limiting their applicability in resource-constrained environments such as mobile robots, drones, and wearable devices. Neuromorphic computing offers promising alternatives by mimicking the brain's energy-efficient information processing mechanisms.
The fundamental advantage of neuromorphic hardware for SLAM applications stems from its event-driven computation paradigm. Unlike conventional systems that operate on fixed clock cycles, neuromorphic processors process information only when necessary, significantly reducing power consumption during periods of low activity. This characteristic is particularly valuable for SLAM applications where environmental changes may occur sporadically.
Quantitative assessments demonstrate remarkable energy efficiency gains. Recent neuromorphic implementations of SLAM algorithms have achieved power reductions of 10-100x compared to GPU-based solutions, while maintaining comparable mapping accuracy. For instance, SpiNNaker-based SLAM implementations operate at 1-2 watts, whereas equivalent GPU implementations typically require 30-50 watts for similar performance levels.
Event-based sensors, particularly Dynamic Vision Sensors (DVS), complement neuromorphic processing by capturing only brightness changes rather than full frames. This data-driven approach reduces the bandwidth requirements and subsequent computational load. Field tests have shown that DVS-based SLAM systems can operate effectively on less than 100mW in certain scenarios, enabling deployment on severely power-constrained platforms.
The co-design of algorithms and hardware presents additional opportunities for energy optimization. Spiking Neural Networks (SNNs) implemented on neuromorphic hardware demonstrate particular efficiency for feature extraction and pattern recognition tasks within SLAM pipelines. By encoding spatial information in spike timing rather than continuous values, these networks reduce the energy cost of information transmission and processing.
Memory access patterns in neuromorphic systems further contribute to energy savings. The distributed memory architecture common in neuromorphic chips reduces the energy-intensive data movement between processing and memory units that plagues von Neumann architectures. This architectural advantage becomes particularly significant for map storage and retrieval operations in SLAM applications.
Despite these advantages, challenges remain in optimizing neuromorphic SLAM for energy efficiency. The translation of conventional SLAM algorithms to spiking neural representations often introduces complexity that can offset some efficiency gains. Additionally, the current generation of neuromorphic hardware still faces limitations in processing capacity that necessitate careful algorithm design to maintain real-time performance within energy constraints.
The fundamental advantage of neuromorphic hardware for SLAM applications stems from its event-driven computation paradigm. Unlike conventional systems that operate on fixed clock cycles, neuromorphic processors process information only when necessary, significantly reducing power consumption during periods of low activity. This characteristic is particularly valuable for SLAM applications where environmental changes may occur sporadically.
Quantitative assessments demonstrate remarkable energy efficiency gains. Recent neuromorphic implementations of SLAM algorithms have achieved power reductions of 10-100x compared to GPU-based solutions, while maintaining comparable mapping accuracy. For instance, SpiNNaker-based SLAM implementations operate at 1-2 watts, whereas equivalent GPU implementations typically require 30-50 watts for similar performance levels.
Event-based sensors, particularly Dynamic Vision Sensors (DVS), complement neuromorphic processing by capturing only brightness changes rather than full frames. This data-driven approach reduces the bandwidth requirements and subsequent computational load. Field tests have shown that DVS-based SLAM systems can operate effectively on less than 100mW in certain scenarios, enabling deployment on severely power-constrained platforms.
The co-design of algorithms and hardware presents additional opportunities for energy optimization. Spiking Neural Networks (SNNs) implemented on neuromorphic hardware demonstrate particular efficiency for feature extraction and pattern recognition tasks within SLAM pipelines. By encoding spatial information in spike timing rather than continuous values, these networks reduce the energy cost of information transmission and processing.
Memory access patterns in neuromorphic systems further contribute to energy savings. The distributed memory architecture common in neuromorphic chips reduces the energy-intensive data movement between processing and memory units that plagues von Neumann architectures. This architectural advantage becomes particularly significant for map storage and retrieval operations in SLAM applications.
Despite these advantages, challenges remain in optimizing neuromorphic SLAM for energy efficiency. The translation of conventional SLAM algorithms to spiking neural representations often introduces complexity that can offset some efficiency gains. Additionally, the current generation of neuromorphic hardware still faces limitations in processing capacity that necessitate careful algorithm design to maintain real-time performance within energy constraints.
Hardware-Software Co-design for Neuromorphic SLAM Systems
Effective neuromorphic SLAM systems require seamless integration between specialized hardware architectures and software algorithms that can leverage their unique capabilities. This co-design approach represents a paradigm shift from traditional computing models, where hardware and software are often developed independently. For neuromorphic SLAM applications, the hardware must efficiently process event-based data streams while the software must exploit the temporal dynamics and sparse encoding inherent to neuromorphic sensing.
Current co-design approaches focus on optimizing the interface between spiking neural networks (SNNs) and neuromorphic hardware platforms such as Intel's Loihi, IBM's TrueNorth, and BrainChip's Akida. These platforms offer massively parallel, low-power computing but require specialized programming paradigms that differ significantly from conventional computing. The challenge lies in developing SLAM algorithms that can fully utilize the temporal precision and energy efficiency of these neuromorphic processors.
Hardware considerations in co-design include optimizing memory hierarchies for sparse, event-driven data processing and implementing efficient spike-based communication protocols. Custom neuromorphic processors with dedicated circuits for spatial mapping functions show promising results, reducing power consumption by up to 100x compared to GPU implementations while maintaining comparable mapping accuracy.
On the software side, researchers are developing spike-based versions of traditional SLAM components, including feature extraction, loop closure detection, and map optimization. These algorithms must be designed with hardware constraints in mind, particularly regarding memory access patterns and computational precision. Event-based visual odometry algorithms have been successfully implemented on neuromorphic hardware, achieving real-time performance with minimal power consumption.
The co-design process typically involves iterative optimization across multiple abstraction layers. Simulation frameworks such as Nengo and Brian2 allow developers to prototype neuromorphic SLAM algorithms before deployment on physical hardware. These tools enable exploration of different neural encoding schemes and network architectures while considering hardware-specific constraints.
Recent advances include the development of hybrid systems that combine conventional processors with neuromorphic accelerators, allowing different components of the SLAM pipeline to run on the most suitable hardware. This approach enables gradual adoption of neuromorphic computing while maintaining compatibility with existing robotics frameworks such as ROS (Robot Operating System).
Looking forward, standardized hardware abstraction layers and software development kits specifically designed for neuromorphic SLAM applications will be crucial for wider adoption. These tools must bridge the gap between neuromorphic hardware capabilities and the practical requirements of real-world robotic systems operating in dynamic environments.
Current co-design approaches focus on optimizing the interface between spiking neural networks (SNNs) and neuromorphic hardware platforms such as Intel's Loihi, IBM's TrueNorth, and BrainChip's Akida. These platforms offer massively parallel, low-power computing but require specialized programming paradigms that differ significantly from conventional computing. The challenge lies in developing SLAM algorithms that can fully utilize the temporal precision and energy efficiency of these neuromorphic processors.
Hardware considerations in co-design include optimizing memory hierarchies for sparse, event-driven data processing and implementing efficient spike-based communication protocols. Custom neuromorphic processors with dedicated circuits for spatial mapping functions show promising results, reducing power consumption by up to 100x compared to GPU implementations while maintaining comparable mapping accuracy.
On the software side, researchers are developing spike-based versions of traditional SLAM components, including feature extraction, loop closure detection, and map optimization. These algorithms must be designed with hardware constraints in mind, particularly regarding memory access patterns and computational precision. Event-based visual odometry algorithms have been successfully implemented on neuromorphic hardware, achieving real-time performance with minimal power consumption.
The co-design process typically involves iterative optimization across multiple abstraction layers. Simulation frameworks such as Nengo and Brian2 allow developers to prototype neuromorphic SLAM algorithms before deployment on physical hardware. These tools enable exploration of different neural encoding schemes and network architectures while considering hardware-specific constraints.
Recent advances include the development of hybrid systems that combine conventional processors with neuromorphic accelerators, allowing different components of the SLAM pipeline to run on the most suitable hardware. This approach enables gradual adoption of neuromorphic computing while maintaining compatibility with existing robotics frameworks such as ROS (Robot Operating System).
Looking forward, standardized hardware abstraction layers and software development kits specifically designed for neuromorphic SLAM applications will be crucial for wider adoption. These tools must bridge the gap between neuromorphic hardware capabilities and the practical requirements of real-world robotic systems operating in dynamic environments.
Unlock deeper insights with PatSnap Eureka Quick Research — get a full tech report to explore trends and direct your research. Try now!
Generate Your Research Report Instantly with AI Agent
Supercharge your innovation with PatSnap Eureka AI Agent Platform!